You might also like
- Digital Control Systems (DCS) Lead CompensationDocument61 pagesDigital Control Systems (DCS) Lead CompensationMeer Zafarullah NoohaniNo ratings yet
- Lecture-4 - S - Plane - Design Nust Masters 2022Document74 pagesLecture-4 - S - Plane - Design Nust Masters 2022Owais JafriNo ratings yet
- Unit 2: Compensator DesignDocument49 pagesUnit 2: Compensator Designharish9No ratings yet
- Lag Compensation & Lag-Lead Compensation Lecture NotesDocument51 pagesLag Compensation & Lag-Lead Compensation Lecture NotesMeer Zafarullah NoohaniNo ratings yet
- Chapter 8 (Lag Compensation)Document40 pagesChapter 8 (Lag Compensation)Nischal MaharjanNo ratings yet
- Control Systems I: CompensationDocument47 pagesControl Systems I: Compensationi dint knowNo ratings yet
- 351 - 27435 - EE411 - 2015 - 1 - 1 - 1 - 0 3 EE411 Lec6,7 Compensation RLDocument47 pages351 - 27435 - EE411 - 2015 - 1 - 1 - 1 - 0 3 EE411 Lec6,7 Compensation RLMohamed SaeedNo ratings yet
- 9UGDocument7 pages9UGAnuj PatelNo ratings yet
- 351 - 27435 - EE419 - 2016 - 1 - 2 - 1 - 0 3 EE419 Lec6,7 Compensation RLDocument47 pages351 - 27435 - EE419 - 2016 - 1 - 2 - 1 - 0 3 EE419 Lec6,7 Compensation RLtsegayNo ratings yet
- IoPSensors2016 SlidesDocument64 pagesIoPSensors2016 Slideskishan2016No ratings yet
- Modeling and Simulation of RLC Circuit (Band Pass Filter)Document25 pagesModeling and Simulation of RLC Circuit (Band Pass Filter)elneelNo ratings yet
- Control System Design Course Work LLDocument9 pagesControl System Design Course Work LLSaqib NaseerNo ratings yet
- ME L19 RootLocusMultiparaDocument4 pagesME L19 RootLocusMultiparaRezkodaNo ratings yet
- ST Micro Interview Questions For Circuit DesignDocument10 pagesST Micro Interview Questions For Circuit DesignvenegallaraghuNo ratings yet
- Lag CompensationDocument40 pagesLag CompensationMeer Zafarullah NoohaniNo ratings yet
- Outline: - Error Correction Codes (Chapter 8) (Week 10 and 11)Document31 pagesOutline: - Error Correction Codes (Chapter 8) (Week 10 and 11)HarshaNo ratings yet
- Digital On-Chip Measurement of PLL Bandwidth and Peaking in 45-nm SOIDocument23 pagesDigital On-Chip Measurement of PLL Bandwidth and Peaking in 45-nm SOIgumptionsNo ratings yet
- Lecture13 03 PDFDocument35 pagesLecture13 03 PDFMichael FralaideNo ratings yet
- Slide 1 - Slide 1Document52 pagesSlide 1 - Slide 1maketoNo ratings yet
- Chapter 7 System Compensation: (Linear Control System Design)Document35 pagesChapter 7 System Compensation: (Linear Control System Design)Khin AyeNo ratings yet
- Psoc Module Advanced Analog Design 11Document117 pagesPsoc Module Advanced Analog Design 11harsh100% (1)
- Chap 8 TraDocument14 pagesChap 8 TraAndreeaNo ratings yet
- Linear Control Systems (EE-3052) : Lecture-12 Introduction To Root LocusDocument25 pagesLinear Control Systems (EE-3052) : Lecture-12 Introduction To Root Locususama asifNo ratings yet
- SJSU EE288 Lecture22 OPAMP For ADCDocument40 pagesSJSU EE288 Lecture22 OPAMP For ADCTING LEE100% (1)
- Binary Thermometer CodeDocument4 pagesBinary Thermometer Codemurthystar100% (1)
- Am1c01470 Si 001Document10 pagesAm1c01470 Si 001Ismael Antonio González RamirezNo ratings yet
- 15ecl48-VTU-raghudathesh-r 2r Dac PDFDocument5 pages15ecl48-VTU-raghudathesh-r 2r Dac PDFraghudatheshgpNo ratings yet
- 15ecl48 VTU Raghudathesh R 2r DacDocument5 pages15ecl48 VTU Raghudathesh R 2r Dacraghudatheshgp100% (1)
- EE571 - Solution To Prelab5: Out in 2Document6 pagesEE571 - Solution To Prelab5: Out in 2shoaibsaleem001No ratings yet
- Structural Dynalysis Torsional Signal Conditioner TSCØØ4Document6 pagesStructural Dynalysis Torsional Signal Conditioner TSCØØ4Ewdes HernandezNo ratings yet
- Lab1 MicropDocument11 pagesLab1 MicropFauzan AriqNo ratings yet
- Question Paper Code:: Reg. No.Document3 pagesQuestion Paper Code:: Reg. No.ManimegalaiNo ratings yet
- ME451: Control Systems Course RoadmapDocument4 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- Automatic Control Exam SolutionsDocument6 pagesAutomatic Control Exam SolutionsAl-ShukaNo ratings yet
- Root Locus PPTDocument71 pagesRoot Locus PPTDarshan A BhyrataeNo ratings yet
- Simulation With MatlabDocument36 pagesSimulation With MatlabKamasani PraveenaNo ratings yet
- Sampleproblems2 PDFDocument4 pagesSampleproblems2 PDFJose Martin Cisneros MandujanoNo ratings yet
- DAC With 8051Document18 pagesDAC With 8051BharathNo ratings yet
- Applications Examples: Transistor AnalysisDocument5 pagesApplications Examples: Transistor Analysisمحمد الساعديNo ratings yet
- Electrical Systems Simulation LAB MANUAL 2019-2020Document25 pagesElectrical Systems Simulation LAB MANUAL 2019-2020Vinay Kumar50% (2)
- D15be7 Com CbgsDocument8 pagesD15be7 Com CbgsrachanaypatilNo ratings yet
- Modern Control Systems (MCS) : Lecture-2-3-4 Root LocusDocument28 pagesModern Control Systems (MCS) : Lecture-2-3-4 Root LocusMeer Zafarullah NoohaniNo ratings yet
- An Introduction to Transmission Line Lightning PerformanceDocument86 pagesAn Introduction to Transmission Line Lightning PerformanceJaime ContrerasNo ratings yet
- Switched-Capacitor Circuits FundamentalsDocument50 pagesSwitched-Capacitor Circuits FundamentalsRaneforyon100% (1)
- Lec.1 .Document15 pagesLec.1 .kabeelm102No ratings yet
- 50-1Document15 pages50-1Muhammad ZubairNo ratings yet
- Paper 1 ICSMMT 2022Document4 pagesPaper 1 ICSMMT 2022Pradeep JunejaNo ratings yet
- Efficient VLSI Implementation of CORDIC-Based Multiplier ArchitectureDocument10 pagesEfficient VLSI Implementation of CORDIC-Based Multiplier Architectureaakanksha080No ratings yet
- Comparative Analysis Effect of Operating Time On Loss and Gain Characteristics of Quantum Dot Laser Using Group Iii NitridesDocument18 pagesComparative Analysis Effect of Operating Time On Loss and Gain Characteristics of Quantum Dot Laser Using Group Iii NitridesMd. Nawab Siraj Ud DaulaNo ratings yet
- Stub Matching Techniques ExplainedDocument19 pagesStub Matching Techniques ExplainedJirah GicangaoNo ratings yet
- Mathematical Modeling and Simulation of SAS System With Magnetorheological (MR) DamperDocument26 pagesMathematical Modeling and Simulation of SAS System With Magnetorheological (MR) DamperRafli AlnursyahNo ratings yet
- Commsim Primer PDFDocument21 pagesCommsim Primer PDFleandro schenoneNo ratings yet
- MCC Speed Regulation Simulink ModelDocument18 pagesMCC Speed Regulation Simulink ModelDraw SmailNo ratings yet
- Laboratory Manual Course Code:Ece 201Document41 pagesLaboratory Manual Course Code:Ece 201Atul SainiNo ratings yet
- Control Engineering LAB-6 Introduction To Some MATLAB's Control Functions Root Locus 6.1: Root LocusDocument12 pagesControl Engineering LAB-6 Introduction To Some MATLAB's Control Functions Root Locus 6.1: Root LocussaadfarazkhanNo ratings yet
- Transistor Electronics: Use of Semiconductor Components in Switching OperationsFrom EverandTransistor Electronics: Use of Semiconductor Components in Switching OperationsRating: 1 out of 5 stars1/5 (1)
- Chapter 8 (PID Controllers)Document46 pagesChapter 8 (PID Controllers)Nischal MaharjanNo ratings yet
- Chapter-8 (Lag Lead Compensation)Document16 pagesChapter-8 (Lag Lead Compensation)Nischal MaharjanNo ratings yet
- Chapter-4 (State Space Representation)Document28 pagesChapter-4 (State Space Representation)Nischal MaharjanNo ratings yet
- Chapter 5 (Frequency Response)Document79 pagesChapter 5 (Frequency Response)Nischal MaharjanNo ratings yet
- lecture - 5-2 - signal - flow - graphs المنهج PDFDocument60 pageslecture - 5-2 - signal - flow - graphs المنهج PDFTariq ZeyadNo ratings yet
- Block Diagram Representation of Control SystemsDocument59 pagesBlock Diagram Representation of Control SystemsNischal MaharjanNo ratings yet
- SRSWebPublishingSystem PDFDocument103 pagesSRSWebPublishingSystem PDFxblackNo ratings yet
- Sunny PathakDocument124 pagesSunny PathakNischal MaharjanNo ratings yet
- Chapter1 (Introduction)Document19 pagesChapter1 (Introduction)Nischal MaharjanNo ratings yet
- PM - List of Question For All ChaptersDocument4 pagesPM - List of Question For All ChaptersNischal MaharjanNo ratings yet
- SW Process & RequirementsDocument111 pagesSW Process & RequirementsNischal MaharjanNo ratings yet
- 420F Backhoe Loader SKR00001-UP (MACHINE) POWERED BY C4.4 Engine (SEBP5986 - 55) - DocumentaciónDocument7 pages420F Backhoe Loader SKR00001-UP (MACHINE) POWERED BY C4.4 Engine (SEBP5986 - 55) - DocumentaciónRosa ChNo ratings yet
- B.E./B.Tech. Course File: St. Xavier's Catholic College of EngineeringDocument25 pagesB.E./B.Tech. Course File: St. Xavier's Catholic College of EngineeringMICHEL RAJ MechNo ratings yet
- IEEE Transactions on Automatic Control Filtering Nonstabilizable SystemsDocument9 pagesIEEE Transactions on Automatic Control Filtering Nonstabilizable SystemssumathyNo ratings yet
- Lect 4 DErivation of Element Properties 3 Node Bar Element Derivation ExamplesDocument14 pagesLect 4 DErivation of Element Properties 3 Node Bar Element Derivation ExamplesKaran PatelNo ratings yet
- JZ10-11-UN20: Environmental ConsiderationsDocument6 pagesJZ10-11-UN20: Environmental Considerationsracoom34No ratings yet
- CZT Technology White Paper1Document6 pagesCZT Technology White Paper1Ozz OzieNo ratings yet
- DSM CalculatorDocument5 pagesDSM Calculatorszk8617No ratings yet
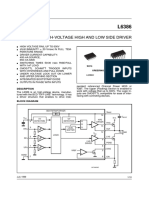
- L6386D - High-Voltage High and Low Side DriverDocument11 pagesL6386D - High-Voltage High and Low Side Driverdoppler9effectNo ratings yet
- Size ReductionDocument39 pagesSize ReductionAstra BeckettNo ratings yet
- Grounding or Earthing Scheme in DCS or PLC Systems (39Document3 pagesGrounding or Earthing Scheme in DCS or PLC Systems (39Vraja KisoriNo ratings yet
- Physics 1Document83 pagesPhysics 1Cantes C. VincentNo ratings yet
- An Introduction to Remote Sensing: Sensors, Platforms, Spectral Signatures, and ApplicationsDocument39 pagesAn Introduction to Remote Sensing: Sensors, Platforms, Spectral Signatures, and ApplicationsPratik RathodNo ratings yet
- ABB Price Book 424Document1 pageABB Price Book 424EliasNo ratings yet
- The Art of Coffee Roasting. ThesisDocument168 pagesThe Art of Coffee Roasting. ThesisOscar DíazNo ratings yet
- Silicon Zener Diodes for Stabilizing and Clipping CircuitsDocument4 pagesSilicon Zener Diodes for Stabilizing and Clipping CircuitsMohamad Toufan AkbarNo ratings yet
- Lecture - Notes - Chemistry - Final - 10232018 PDFDocument130 pagesLecture - Notes - Chemistry - Final - 10232018 PDFAlvin DeliroNo ratings yet
- Parameters of DC High-Speed Circuit-Breakers: Artur RojekDocument5 pagesParameters of DC High-Speed Circuit-Breakers: Artur RojekagarwaalaaaaNo ratings yet
- Potable Water Expansion Tank Sizing ProgramDocument2 pagesPotable Water Expansion Tank Sizing ProgramChaosNo ratings yet
- A Comparison Study of The Electrochemical Polishing of Laser Powder Bed Fusion HR 2 Stainless Steel and Alsi10MgDocument10 pagesA Comparison Study of The Electrochemical Polishing of Laser Powder Bed Fusion HR 2 Stainless Steel and Alsi10Mgsai charanNo ratings yet
- Holmes 1995Document5 pagesHolmes 1995Milutin MelkaNo ratings yet
- TSD-3Document3 pagesTSD-3Deepankar Sadhan BanikNo ratings yet
- Data Sheet 3VM1340-4EE32-0AA0: ModelDocument4 pagesData Sheet 3VM1340-4EE32-0AA0: ModelVicthor TrautmannNo ratings yet
- +1 CBSE - PHYSICS CDF MATERIAL (37-60) .PMD PDFDocument24 pages+1 CBSE - PHYSICS CDF MATERIAL (37-60) .PMD PDFHema Baskaran100% (2)
- CD-BA1500H: Service ManualDocument52 pagesCD-BA1500H: Service ManualmrudzinskasNo ratings yet
- Mechanical Professional ElectiveDocument310 pagesMechanical Professional ElectivearunrajNo ratings yet
- Chapter Two Literature ReviewDocument5 pagesChapter Two Literature ReviewLarweh DanielNo ratings yet
- Z & H ParameterDocument14 pagesZ & H ParameterTajatNo ratings yet
- Exhaust Base Vam Tonnage CalculationDocument9 pagesExhaust Base Vam Tonnage CalculationMagical RiyaNo ratings yet
- The Principles of Air Flow, Air Pressure, and Air FiltrationDocument12 pagesThe Principles of Air Flow, Air Pressure, and Air FiltrationONAFUWA AyodeleNo ratings yet
- AJSIR-3-5-277-282Document6 pagesAJSIR-3-5-277-282omf.informaticienNo ratings yet