You might also like
- Spur Gear Design Learn EngineeringDocument4 pagesSpur Gear Design Learn EngineeringImran Sajid ShahidNo ratings yet
- Cylindrical Compression Helix Springs For Suspension SystemsFrom EverandCylindrical Compression Helix Springs For Suspension SystemsNo ratings yet
- Isma2012 0731Document12 pagesIsma2012 0731ranim najibNo ratings yet
- Design Analysis of Spur Gear With The Usage of The Advanced ComputerDocument6 pagesDesign Analysis of Spur Gear With The Usage of The Advanced ComputerMohammed JimmyNo ratings yet
- 485ijarseDocument9 pages485ijarsepnsa saasNo ratings yet
- Influence of System Parameters Using Fuse Protection of Regenerative DC DrivesFrom EverandInfluence of System Parameters Using Fuse Protection of Regenerative DC DrivesNo ratings yet
- Gear CouplingDocument4 pagesGear Couplingmartín_suárez_11No ratings yet
- BacklashDocument29 pagesBacklashAnurag SarkarNo ratings yet
- Introduction To Direct Gear DesignDocument15 pagesIntroduction To Direct Gear DesignburaktuncerNo ratings yet
- Face Gears: Geometry and Strength: Ulrich Kissling and Stefan BeermannDocument8 pagesFace Gears: Geometry and Strength: Ulrich Kissling and Stefan BeermannosaniamecNo ratings yet
- Design and Structural Analysis of Spur Gear Using Various MaterialsDocument15 pagesDesign and Structural Analysis of Spur Gear Using Various MaterialsprajeeshNo ratings yet
- Bending Load Capacity Enhancement Using Asymmetric Tooth ProfilesDocument7 pagesBending Load Capacity Enhancement Using Asymmetric Tooth ProfilesJavier Antonio Cardenas OliverosNo ratings yet
- New SplineDocument20 pagesNew SplineHiyeedNo ratings yet
- Spur Gear DesignDocument4 pagesSpur Gear DesignKB MambaNo ratings yet
- Jabatan Kejuruteraan Mekanikal Jj513Document12 pagesJabatan Kejuruteraan Mekanikal Jj513Mohd Sabaruddin Mohd SallehNo ratings yet
- AGMA Technical PaperDocument14 pagesAGMA Technical PaperLuis TestaNo ratings yet
- Ijmet 07 05 023Document12 pagesIjmet 07 05 023SANDEEP BUDANIANo ratings yet
- Design and Structural Analysis of a Diesel Engine Connecting RodDocument15 pagesDesign and Structural Analysis of a Diesel Engine Connecting RodRakesh Rockzss0% (1)
- CH 14Document13 pagesCH 14mssaber77No ratings yet
- Dynamic Load Analysis and Optimization of A Fracture-Split Connecting RodDocument11 pagesDynamic Load Analysis and Optimization of A Fracture-Split Connecting RodRahul BadgujarNo ratings yet
- Bevel GearDocument17 pagesBevel Gearparesh09No ratings yet
- Spur Gear Design for Mechanical Strength and Surface ResistanceDocument6 pagesSpur Gear Design for Mechanical Strength and Surface ResistanceANILNo ratings yet
- Gear Geometry For Reduced and Robust Transmission Error and Gearbox NoiseDocument21 pagesGear Geometry For Reduced and Robust Transmission Error and Gearbox Noiseranim najibNo ratings yet
- Long Addendum Gears 1946Document15 pagesLong Addendum Gears 1946Marco ViniciusNo ratings yet
- Mechanical Part: 2.1 Working PrincipleDocument51 pagesMechanical Part: 2.1 Working PrincipleKapil BhatiNo ratings yet
- Lecture 05 Bevel GearsDocument26 pagesLecture 05 Bevel GearsAreeba MujtabaNo ratings yet
- Elastic Analysis of Load Distribution in Wide Faced Spur GearsDocument208 pagesElastic Analysis of Load Distribution in Wide Faced Spur GearsJulian Steward100% (1)
- Contact Analysis For Drum Brakes and Disk Brakes Using AdinaDocument14 pagesContact Analysis For Drum Brakes and Disk Brakes Using AdinaashwaniNo ratings yet
- Effect of Geometrical Imperfections of Gears in Large Offshore Wind Turbine Gear Trains Case StudiesDocument10 pagesEffect of Geometrical Imperfections of Gears in Large Offshore Wind Turbine Gear Trains Case StudiesFatho JamylNo ratings yet
- Case Study and Stress Analysis of A 3Document12 pagesCase Study and Stress Analysis of A 3Talha MemonNo ratings yet
- Asymmetric Cylindrical GearsDocument6 pagesAsymmetric Cylindrical Gearsकृष्णकुमार दत्तात्रेय जोशीNo ratings yet
- GEARSDocument35 pagesGEARS1237Nasmal NNo ratings yet
- EPS Sensor Torsion Bar Design and Structure Analysis: Shu-Juan Fang and Qing-Tao LVDocument5 pagesEPS Sensor Torsion Bar Design and Structure Analysis: Shu-Juan Fang and Qing-Tao LVdavid leeNo ratings yet
- Effect of Increased Center Distance on Gear Teeth Contact Ratio and StressDocument21 pagesEffect of Increased Center Distance on Gear Teeth Contact Ratio and StressDavide MaranoNo ratings yet
- SpurDocument57 pagesSpurDangol RupeshNo ratings yet
- Finite Element Method: Project ReportDocument15 pagesFinite Element Method: Project ReportAtikant BaliNo ratings yet
- Gears Presentation BubuDocument37 pagesGears Presentation BubuAbebaw AyeleNo ratings yet
- Static/dynamic Contact FEA and Experimental Study For Tooth Profile Modification of Helical GearsDocument9 pagesStatic/dynamic Contact FEA and Experimental Study For Tooth Profile Modification of Helical Gearsanmol6237No ratings yet
- ARB DesignDocument4 pagesARB Designtamilselvan33No ratings yet
- VD - Unit-1 - Trail With Steering Angle and Lean AngleDocument16 pagesVD - Unit-1 - Trail With Steering Angle and Lean AngleKarthick VasanNo ratings yet
- Design and Optimization of The Impeller On Centrifugal Compressor in Fuel Cell VehicleDocument8 pagesDesign and Optimization of The Impeller On Centrifugal Compressor in Fuel Cell VehicleSuherman MuktiNo ratings yet
- GearDocument57 pagesGeargautham_93100% (1)
- Contact Stress Analysis of Barrel Coupling Using FEADocument8 pagesContact Stress Analysis of Barrel Coupling Using FEABruno SantosNo ratings yet
- Design and Development of An Octagonal Strain Ring Based Load Cell - 2Document16 pagesDesign and Development of An Octagonal Strain Ring Based Load Cell - 2Arunava ChoudhuryNo ratings yet
- P 07400Document11 pagesP 07400raviprasadrNo ratings yet
- 2 Gear BasicsDocument6 pages2 Gear BasicsMohamed Adel RizkNo ratings yet
- Spur Gears Are The Most Common Type of GearsDocument9 pagesSpur Gears Are The Most Common Type of GearsEngineering ProjectNo ratings yet
- Automated Modelling of Spur Gears and Worm Gears Using ABAQUS/CAEDocument20 pagesAutomated Modelling of Spur Gears and Worm Gears Using ABAQUS/CAEGanesh KCNo ratings yet
- Ijdmt: ©iaemeDocument11 pagesIjdmt: ©iaemeIAEME PublicationNo ratings yet
- Miniature Coupling LOVEJOY PDFDocument12 pagesMiniature Coupling LOVEJOY PDFRafo Vega GuerovichNo ratings yet
- KissSoft Article GearAnalysisAndOptimization PDFDocument12 pagesKissSoft Article GearAnalysisAndOptimization PDFeng13No ratings yet
- Design of Helical Compression Spring in BikeDocument9 pagesDesign of Helical Compression Spring in Bikeraghavendra guptaNo ratings yet
- Design Factors When Using Small Bearings: Part 1: Bearing GeometryDocument7 pagesDesign Factors When Using Small Bearings: Part 1: Bearing Geometryhittaf_05No ratings yet
- Design and Efficiency of An Asymmetric Gear: V. Balambica, Vishwa Deepak & Sushant KumarDocument8 pagesDesign and Efficiency of An Asymmetric Gear: V. Balambica, Vishwa Deepak & Sushant KumarTJPRC PublicationsNo ratings yet
- Tolerancing Notes On 18.9Document29 pagesTolerancing Notes On 18.9Anantha KumarNo ratings yet
- Spur Gear Design GuideDocument13 pagesSpur Gear Design GuideRoshan ShanmughanNo ratings yet
- Applied Linear Algebra: Matrices and TransposeDocument10 pagesApplied Linear Algebra: Matrices and TransposeHafiz Afaq AliNo ratings yet
- Lecture # Lab-Graphical Methods (Excel)Document22 pagesLecture # Lab-Graphical Methods (Excel)Hafiz Afaq AliNo ratings yet
- Lecture # 5,6,7,8 Linear Equations FinalDocument76 pagesLecture # 5,6,7,8 Linear Equations FinalHafiz Afaq AliNo ratings yet
- BSc Industrial Engineering Applied Linear Algebra NotesDocument18 pagesBSc Industrial Engineering Applied Linear Algebra NotesHafiz Afaq AliNo ratings yet
- Lecture # 0 4 MMDocument7 pagesLecture # 0 4 MMHafiz Afaq AliNo ratings yet
- Lecture # 01 Matrix BasicsDocument29 pagesLecture # 01 Matrix BasicsHafiz Afaq AliNo ratings yet
- Lecture # 01 ALA IntroDocument13 pagesLecture # 01 ALA IntroHafiz Afaq AliNo ratings yet
- B.Sc. Industrial Engineering & Management Semester: 1 2019-2023Document64 pagesB.Sc. Industrial Engineering & Management Semester: 1 2019-2023Hafiz Afaq AliNo ratings yet
- Product Download PDF 55d532bb20309 PDFDocument63 pagesProduct Download PDF 55d532bb20309 PDFCr250rNo ratings yet
- 15-Diesel Fuel SystemDocument17 pages15-Diesel Fuel SystemEdwinGeorgeParuvanany0% (1)
- LIST PART SERVICE EXCAVATOR DOZERDocument3 pagesLIST PART SERVICE EXCAVATOR DOZERAndiNo ratings yet
- "L8" Drive End: Operation - Assembly Instructions and Parts List ForDocument7 pages"L8" Drive End: Operation - Assembly Instructions and Parts List ForACCA PumpsNo ratings yet
- Fiat Tractor Service ManualDocument11 pagesFiat Tractor Service ManualBlytzx Games0% (1)
- Yamaha Jog 87-90Document249 pagesYamaha Jog 87-90劉擎鎮67% (3)
- G420fe LPDocument4 pagesG420fe LPCiro Montiel0% (2)
- I Reliable/Durable Built I Ease I - I Convenience T - : OperatingDocument14 pagesI Reliable/Durable Built I Ease I - I Convenience T - : Operatingrene hernandezNo ratings yet
- Surface EquipmentDocument45 pagesSurface EquipmentvibhutiNo ratings yet
- DZ450/9.14-S Substructure Spare Parts ListDocument6 pagesDZ450/9.14-S Substructure Spare Parts ListramiNo ratings yet
- MS460 - Manual and Parts ListDocument48 pagesMS460 - Manual and Parts ListJohn MueNo ratings yet
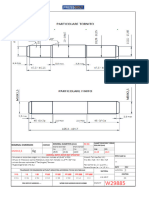
- Nominal Dimension: 18,28 18,25 General Notes When Not SpecifiedDocument1 pageNominal Dimension: 18,28 18,25 General Notes When Not SpecifiedDaniele Fazio MusicNo ratings yet
- Daily Monitoring Defect SheetDocument15 pagesDaily Monitoring Defect Sheetmanju nathNo ratings yet
- Osymetric Oval ChainringDocument11 pagesOsymetric Oval ChainringSepeda IsMeNo ratings yet
- Learning Guide OEACDocument73 pagesLearning Guide OEACBiruk TilahunNo ratings yet
- F115a'12 Fl115a'12: (68VB) (68WB)Document96 pagesF115a'12 Fl115a'12: (68VB) (68WB)AlexDiazNo ratings yet
- Ultegra R8000 Series Genuine Parts PDFDocument2 pagesUltegra R8000 Series Genuine Parts PDFEddie DowningNo ratings yet
- Manual Atornillador Dewalt dcf885Document3 pagesManual Atornillador Dewalt dcf885FranNo ratings yet
- Bead Roller Operating ManualDocument15 pagesBead Roller Operating ManualEdSoloNo ratings yet
- Prusa I3 Rework Assembly InstructionsDocument36 pagesPrusa I3 Rework Assembly InstructionsDarma LodarNo ratings yet
- Dde 30Document1 pageDde 30NaufalNo ratings yet
- Satori No8 PDF 10mbDocument60 pagesSatori No8 PDF 10mbAlan FarithNo ratings yet
- Atsg 2005 BulletinDocument46 pagesAtsg 2005 Bulletinlolop434350% (4)
- CPM 0250 Water Pumping System Using River Force DevDocument9 pagesCPM 0250 Water Pumping System Using River Force DevmanjunathNo ratings yet
- Rep Handbuch t140Document214 pagesRep Handbuch t140ing.sacchiNo ratings yet
- Ferrules Crimp Tools PDFDocument5 pagesFerrules Crimp Tools PDFReymar BanaagNo ratings yet
- 023 Electrical ChecklistDocument1 page023 Electrical ChecklistJunard Lu HapNo ratings yet
- Motorcycle Troubleshooting: PartsDocument14 pagesMotorcycle Troubleshooting: PartsDupinga MHP JVNo ratings yet
- Spare Parts Catalogue for PALFINGER Loader PK 11001Document134 pagesSpare Parts Catalogue for PALFINGER Loader PK 11001Alfred HitchcockNo ratings yet
- Daily Marketing Maret 15Document27 pagesDaily Marketing Maret 15Bella MuharamNo ratings yet