You might also like
- SSP-NR 550 The Passat GTE PDFDocument72 pagesSSP-NR 550 The Passat GTE PDFan89% (9)
- Department of Mechanical Engineering Question Bank Subject Name: Heat & Mass Transfer Unit - I Conduction Part - ADocument3 pagesDepartment of Mechanical Engineering Question Bank Subject Name: Heat & Mass Transfer Unit - I Conduction Part - AkarthikNo ratings yet
- Service Manual Service Manual: SCHWING Ñ Control System " VECTOR " SCHWING Ñ Control System " VECTOR "Document48 pagesService Manual Service Manual: SCHWING Ñ Control System " VECTOR " SCHWING Ñ Control System " VECTOR "Fawzi Alzubairy100% (2)
- UVM SlidesDocument158 pagesUVM Slidesrramesh3002No ratings yet
- VPEG Sequence Control LC64Document48 pagesVPEG Sequence Control LC64Hammad Ashraf100% (1)
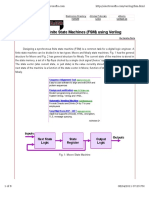
- FSM Design Using Verilog - ElectrosoftsDocument7 pagesFSM Design Using Verilog - ElectrosoftsAbhishek KumarNo ratings yet
- 2 Kcp084 Control Logic DiagramDocument3 pages2 Kcp084 Control Logic Diagramwalter puma floresNo ratings yet
- T P ML I S M: HE ACK Nterface Tate OdelDocument6 pagesT P ML I S M: HE ACK Nterface Tate OdelPhượng NguyễnNo ratings yet
- (SEAL) SealwaterDocument7 pages(SEAL) SealwaterBabbooNo ratings yet
- Ignition & Starting System PresentationDocument2 pagesIgnition & Starting System PresentationPédro GONZALEZNo ratings yet
- Omac Packml V3.0 State Model SimulatorDocument4 pagesOmac Packml V3.0 State Model SimulatorvijikeshNo ratings yet
- Cap 01Document6 pagesCap 01D7sus2No ratings yet
- EASy Reference GuideDocument8 pagesEASy Reference Guidemamdouh musaddiNo ratings yet
- Software Requirements Engineering Structural & Behavioural ModellingDocument38 pagesSoftware Requirements Engineering Structural & Behavioural Modellingmuhammad abdullahNo ratings yet
- IP Manipulator Op ManualDocument10 pagesIP Manipulator Op ManualBaptiste DespresNo ratings yet
- (STCW) Steam and Cooling WatersupplyDocument19 pages(STCW) Steam and Cooling WatersupplyBabbooNo ratings yet
- FaqDocument8 pagesFaqdhaakchikNo ratings yet
- Structured Ladder/FBD 6/12/2020 Data Name: POU - 01Document6 pagesStructured Ladder/FBD 6/12/2020 Data Name: POU - 01creedNo ratings yet
- VectorDocument48 pagesVectorAli KiaNo ratings yet
- 777 - NP 07 - Pushback and Engine StartDocument2 pages777 - NP 07 - Pushback and Engine StartJoel VitorNo ratings yet
- PL/SQL Runtime Engine: Without Bulk Bind Oracle ServerDocument2 pagesPL/SQL Runtime Engine: Without Bulk Bind Oracle ServerredroNo ratings yet
- VectorDocument56 pagesVectorayam ayam100% (1)
- FuseCheatsheet PDFDocument1 pageFuseCheatsheet PDFestebanNo ratings yet
- PIC Part5 InterruptsDocument53 pagesPIC Part5 InterruptsJean Profite100% (2)
- Iasimp Qs034 en PDocument278 pagesIasimp Qs034 en PÁgost VitaNo ratings yet
- On The Fly Reset in UVMDocument7 pagesOn The Fly Reset in UVMChandan ChoudhuryNo ratings yet
- U 3ev53600 Ep 3ev53600stpDocument10 pagesU 3ev53600 Ep 3ev53600stpBabbooNo ratings yet
- Scan Flow ChartDocument2 pagesScan Flow ChartSam eagle goodNo ratings yet
- In Cli Sbi Sbi Out: Store SREG ValueDocument1 pageIn Cli Sbi Sbi Out: Store SREG ValuesalarNo ratings yet
- Mrj3a 440 504Document65 pagesMrj3a 440 504Vũ HồNo ratings yet
- Vector Webinar OsCAN Basic 20101214Document16 pagesVector Webinar OsCAN Basic 20101214MikeNo ratings yet
- Print Verilog CodeDocument24 pagesPrint Verilog CodeShruthi DyavegowdaNo ratings yet
- Chapter 7Document7 pagesChapter 7fabian AndruskoNo ratings yet
- Osp 150v5adDocument10 pagesOsp 150v5adQuy HoangNo ratings yet
- SJT-WVF-V Group Control User Manual (Version 2018) : Shenyang Bluelight 2018.7.9Document16 pagesSJT-WVF-V Group Control User Manual (Version 2018) : Shenyang Bluelight 2018.7.9mohammedalathwary100% (2)
- Topic 5 Procedures and AssignmentsDocument3 pagesTopic 5 Procedures and AssignmentsECE TheivanayakiNo ratings yet
- Lecture 13 - Iteration and For-Loops - 2022Document45 pagesLecture 13 - Iteration and For-Loops - 2022Hải LêNo ratings yet
- Operations Guide - SpanishDocument14 pagesOperations Guide - SpanishHector EspinozaNo ratings yet
- Starter Shut Off Valve Not Open FaultDocument2 pagesStarter Shut Off Valve Not Open FaultPédro GONZALEZNo ratings yet
- U 3ev53600 Ep 3ev53600w2pDocument10 pagesU 3ev53600 Ep 3ev53600w2pBabbooNo ratings yet
- Comisionamiento de Fuente SiemensDocument7 pagesComisionamiento de Fuente SiemensALEX TROLNo ratings yet
- Fun With Uvm Sequences Coding and Debugging - VH v15 I12Document11 pagesFun With Uvm Sequences Coding and Debugging - VH v15 I12vjemmanNo ratings yet
- (CCVL) Concentrate ValvesDocument11 pages(CCVL) Concentrate ValvesBabbooNo ratings yet
- Ele & CAPODocument35 pagesEle & CAPOSumitomo Laos Sumitomo Laos100% (7)
- Baxter - Heraeus Megafuge 1,2 - User ManualDocument13 pagesBaxter - Heraeus Megafuge 1,2 - User ManualMarcos ZanelliNo ratings yet
- Calibração EVC D6 435 D-C 13 11 14 7748828 - 1 PDFDocument2 pagesCalibração EVC D6 435 D-C 13 11 14 7748828 - 1 PDFLucas SouzaNo ratings yet
- Designing Finite State Machines (FSM) Using VerilogDocument8 pagesDesigning Finite State Machines (FSM) Using Verilog1am17ec014 ashnal ahmedNo ratings yet
- Apollo 9 PAO Mission Commentary TranscriptDocument1,006 pagesApollo 9 PAO Mission Commentary TranscriptBob AndrepontNo ratings yet
- U 3ev53600 Ep 3ev53600esdDocument20 pagesU 3ev53600 Ep 3ev53600esdBabbooNo ratings yet
- XAMPP Control Panel: Port(s)Document1 pageXAMPP Control Panel: Port(s)Elhadj Houdy BahNo ratings yet
- Sofratest Software FlowchartDocument1 pageSofratest Software Flowchartzeki kozaciogluNo ratings yet
- Install GuideDocument12 pagesInstall Guidekaleem100% (13)
- FC500 - : Name: Family: Author: Block Version: Time Stamp Code: Interface: Lengths (Block/logic/data)Document3 pagesFC500 - : Name: Family: Author: Block Version: Time Stamp Code: Interface: Lengths (Block/logic/data)EwdinNo ratings yet
- Attachment No 2 PDFDocument10 pagesAttachment No 2 PDFTusharRoyNo ratings yet
- ASAM XIL Release-Presentation V2-2-0Document34 pagesASAM XIL Release-Presentation V2-2-0Arsalan KhanNo ratings yet
- Olympus - Afl S LanguagesDocument48 pagesOlympus - Afl S LanguagesAlejandroNo ratings yet
- Engine Control (3Vz-E)Document8 pagesEngine Control (3Vz-E)Fernando AntonioNo ratings yet
- Yokogawa UT35-UT32A - Part3Document2 pagesYokogawa UT35-UT32A - Part3Fajar PrawiroNo ratings yet
- Dokumen - Tips C551a Multi Mode Manual Transaxle 1pdfDocument614 pagesDokumen - Tips C551a Multi Mode Manual Transaxle 1pdfErsin AliNo ratings yet
- AutoCAD - Modify ToolbarDocument18 pagesAutoCAD - Modify ToolbarMarcusNo ratings yet
- ReportDocument1 pageReportDrew DacanayNo ratings yet
- Dilution CalculationsDocument2 pagesDilution CalculationsDeden Putra BabakanNo ratings yet
- Phenol: Carboxylation of Phenol: Kolb-Schmitt ReactionDocument9 pagesPhenol: Carboxylation of Phenol: Kolb-Schmitt ReactionAkhilaNo ratings yet
- Dawood University of Engineering & Technology Karachi Department of Basic Sciences & HumanitiesDocument4 pagesDawood University of Engineering & Technology Karachi Department of Basic Sciences & HumanitiessamadNo ratings yet
- DWL-3200AP B1 Manual v2.40 PDFDocument83 pagesDWL-3200AP B1 Manual v2.40 PDFFrank Erick Soto HuillcaNo ratings yet
- Celonis Configuration Store Setup Guide 1.6Document11 pagesCelonis Configuration Store Setup Guide 1.6Venugopal JujhavarappuNo ratings yet
- AristotleDocument126 pagesAristotlenda_naumNo ratings yet
- Method IvivcDocument15 pagesMethod IvivcHari Krishnan100% (1)
- UACE BIO PAPER TWO SET 3 2023-JusanDocument3 pagesUACE BIO PAPER TWO SET 3 2023-JusanCampbell OGENRWOTNo ratings yet
- DDP400 Open-Frame and U-Chassis :: ROAL Living EnergyDocument12 pagesDDP400 Open-Frame and U-Chassis :: ROAL Living EnergyroalscribdNo ratings yet
- Aviation Service ManualDocument28 pagesAviation Service ManualArmo MoralesNo ratings yet
- TRM Reb670Document490 pagesTRM Reb670jayapalNo ratings yet
- Control of Concentration in CSTR Using DMC and Conventional Pid Based On Relay Feedback MethodDocument8 pagesControl of Concentration in CSTR Using DMC and Conventional Pid Based On Relay Feedback MethodSadagopan RajaNo ratings yet
- Tigear - 2 Gearing: Engineering CatalogDocument292 pagesTigear - 2 Gearing: Engineering Catalogrrobles011No ratings yet
- Inter Freq Handover Parameter Tuning: F2 Cell 2D/2F/2B Threshold OptimizationDocument19 pagesInter Freq Handover Parameter Tuning: F2 Cell 2D/2F/2B Threshold Optimizationedwin samaNo ratings yet
- SmartPRO 5000U Plus ManualDocument10 pagesSmartPRO 5000U Plus ManualMugiranezaNo ratings yet
- 2.1.2 Pseudocode PDFDocument13 pages2.1.2 Pseudocode PDFBlessed Endibye KanyembaNo ratings yet
- Lecture 4 Maps Data Entry Part 1Document80 pagesLecture 4 Maps Data Entry Part 1arifNo ratings yet
- Mm1 Report Group2 FinalDocument17 pagesMm1 Report Group2 FinalMayumi Atisha KimNo ratings yet
- Aqa Byb1 W QP Jun07Document12 pagesAqa Byb1 W QP Jun07李超然No ratings yet
- Digital Image ProcessingDocument71 pagesDigital Image ProcessingPratibha SharmaNo ratings yet
- Installation Guide VAMP 221-MCSet - V4Document16 pagesInstallation Guide VAMP 221-MCSet - V4cokicisneNo ratings yet
- Enerpac SQD-Series ManualDocument16 pagesEnerpac SQD-Series ManualTitanplyNo ratings yet
- Jain 2018Document10 pagesJain 2018Pablo Ignacio Contreras EstradaNo ratings yet
- Tablet Processing Problems and Their Remedies: Baharul IslamDocument16 pagesTablet Processing Problems and Their Remedies: Baharul IslamEspañola EloiseNo ratings yet
- Boxer EngineDocument84 pagesBoxer EngineTOONGA100% (7)
- In Gov cbse-SSCMP-221966102021Document1 pageIn Gov cbse-SSCMP-221966102021Amod KumarNo ratings yet