You might also like
- Mips IsaDocument84 pagesMips Isawelcome to my worldNo ratings yet
- CS 4200/5200 Computer Architecture I: MIPS Instruction Set ArchitectureDocument12 pagesCS 4200/5200 Computer Architecture I: MIPS Instruction Set ArchitectureIndrit QokuNo ratings yet
- L04 MIPSAssemblyOverviewDocument30 pagesL04 MIPSAssemblyOverviewKhoa NgôNo ratings yet
- MIPS Instruction Set Architecture: ECE4680 Computer Organization & ArchitectureDocument4 pagesMIPS Instruction Set Architecture: ECE4680 Computer Organization & ArchitectureNarender KumarNo ratings yet
- ECE4680 Computer Organization & Architecture: MIPS Instruction Set ArchitectureDocument11 pagesECE4680 Computer Organization & Architecture: MIPS Instruction Set ArchitectureNarender KumarNo ratings yet
- Dwnload Full Computer Organization and Architecture 10th Edition Stallings Solutions Manual PDFDocument36 pagesDwnload Full Computer Organization and Architecture 10th Edition Stallings Solutions Manual PDFeliasfosterhs6r100% (16)
- A Minimalistic Introduction To MIPS InstructionDocument5 pagesA Minimalistic Introduction To MIPS InstructionTrần Ngọc LâmNo ratings yet
- Mips VHDLDocument22 pagesMips VHDLMohammed El-AdawyNo ratings yet
- Instructions: Csce 212: Final Exam Spring 2009Document5 pagesInstructions: Csce 212: Final Exam Spring 2009NapsterNo ratings yet
- Instructions: Language of The Computer: Omputer Rganization and EsignDocument33 pagesInstructions: Language of The Computer: Omputer Rganization and EsignBody AbdoNo ratings yet
- Computer Science Homework WorksheetDocument5 pagesComputer Science Homework WorksheetEe JianNo ratings yet
- Coa AppliedDocument13 pagesCoa AppliedIshanNo ratings yet
- 16.482 / 16.561 Computer Architecture and Design: Instructor: Dr. Michael Geiger Fall 2013Document42 pages16.482 / 16.561 Computer Architecture and Design: Instructor: Dr. Michael Geiger Fall 2013Uap OrlandinhoNo ratings yet
- VHDL Come Strumento Di Progettazione Per Circuiti Digitali VLSIDocument23 pagesVHDL Come Strumento Di Progettazione Per Circuiti Digitali VLSIunibfeNo ratings yet
- MIPS Instruction ReferenceDocument12 pagesMIPS Instruction ReferencebehuskimNo ratings yet
- Indian Institute of Technology, Kharagpur: Mid-Spring Semester 2021-22Document4 pagesIndian Institute of Technology, Kharagpur: Mid-Spring Semester 2021-22Utkarsh PatelNo ratings yet
- Mit Ocw Complex Digital Systems Lab1Document6 pagesMit Ocw Complex Digital Systems Lab1Monika YadavNo ratings yet
- 04 - Performance and PipeliningDocument55 pages04 - Performance and PipeliningSuganya PeriasamyNo ratings yet
- MIPS Hello WorldDocument31 pagesMIPS Hello WorldMLW BDNo ratings yet
- Ece4750 T01 Proc ScycleDocument24 pagesEce4750 T01 Proc ScyclekartimidNo ratings yet
- Computer Architecture - Sheet 7 SolutionDocument5 pagesComputer Architecture - Sheet 7 Solution5frq4hkpc5No ratings yet
- Mips IsaDocument79 pagesMips Isaphan_vinh_20No ratings yet
- System Software Question Bank 2012 With Part-B AnswersDocument49 pagesSystem Software Question Bank 2012 With Part-B Answerssumathi7975% (16)
- Cda3101 f13 Exam3 AnswerkeyDocument7 pagesCda3101 f13 Exam3 Answerkeydgsfg safdafNo ratings yet
- Data HazardsDocument15 pagesData HazardsPetreMaziluNo ratings yet
- Pipelining and Instruction Level Parallelism: 5 Steps of MIPS DatapathDocument12 pagesPipelining and Instruction Level Parallelism: 5 Steps of MIPS DatapathNgat SkyNo ratings yet
- MIPS Instruction ReferenceDocument12 pagesMIPS Instruction Referencedanej8909No ratings yet
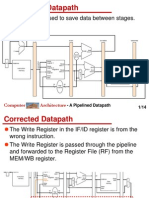
- A Pipelined Datapath: Resisters Are Used To Save Data Between StagesDocument14 pagesA Pipelined Datapath: Resisters Are Used To Save Data Between StagesJohnDaGRTNo ratings yet
- Lec39 FullDocument27 pagesLec39 FullnmaravindNo ratings yet
- Mips LectureDocument8 pagesMips LectureShyamala VenkataramaniNo ratings yet
- Controlling A Pipelined DatapathDocument17 pagesControlling A Pipelined DatapathAlexander TaylorNo ratings yet
- Instruction Set Architecture: 15-740 FALL'18 Nathan BeckmannDocument94 pagesInstruction Set Architecture: 15-740 FALL'18 Nathan BeckmannVesko IlijaziNo ratings yet
- Spos Lab ManualDocument63 pagesSpos Lab ManualishikaNo ratings yet
- Laporan Configuring Basic Eigrp For Ipv4Document18 pagesLaporan Configuring Basic Eigrp For Ipv4sumar tiniNo ratings yet
- Computer Architecture: Trần Trọng HiếuDocument65 pagesComputer Architecture: Trần Trọng HiếuNguyễn Văn TúNo ratings yet
- Konfigurasi Static Routing LABDocument18 pagesKonfigurasi Static Routing LABDhani msNo ratings yet
- Homework Computer ArchitectureDocument13 pagesHomework Computer ArchitectureMumtahina ParvinNo ratings yet
- Exam2 Fa2014 SolutionDocument14 pagesExam2 Fa2014 Solutionrafeak rafeakNo ratings yet
- Systemc-Ams Tutorial: Institute of Computer Technology Vienna University of Technology Markus DammDocument26 pagesSystemc-Ams Tutorial: Institute of Computer Technology Vienna University of Technology Markus DammAamir HabibNo ratings yet
- Risc in Pipe IneDocument39 pagesRisc in Pipe IneNagarjuna ReddyNo ratings yet
- EXAMDec2012 SolutionDocument8 pagesEXAMDec2012 Solutionخالد ناهض نايف نجمNo ratings yet
- Chapter03 1MIPS ISA PDFDocument63 pagesChapter03 1MIPS ISA PDFHoang Thao NguyenNo ratings yet
- Computer Organization: An Introduction To RISC Hardware: 6.1 An Overview of PipeliningDocument12 pagesComputer Organization: An Introduction To RISC Hardware: 6.1 An Overview of PipeliningAmrendra Kumar MishraNo ratings yet
- ECE 4680: Computer Architecture and OrganizationDocument20 pagesECE 4680: Computer Architecture and OrganizationNarender KumarNo ratings yet
- Class15 Floatpt-Handout PDFDocument18 pagesClass15 Floatpt-Handout PDFPavan BeharaNo ratings yet
- Lab 5 DR Muslim (Latest)Document15 pagesLab 5 DR Muslim (Latest)a ThanhNo ratings yet
- Computer Organization and Design CH 2Document12 pagesComputer Organization and Design CH 2SilverNo ratings yet
- VHDL Processes: Cwru Eecs 318Document24 pagesVHDL Processes: Cwru Eecs 318KarThikNo ratings yet
- Introduction To Compilers: Jun.-Prof. Dr. Christian Plessl Custom Computing University of PaderbornDocument51 pagesIntroduction To Compilers: Jun.-Prof. Dr. Christian Plessl Custom Computing University of PaderbornHariharan ElangandhiNo ratings yet
- Introduction To Cmos Vlsi Design: MIPS Processor ExampleDocument43 pagesIntroduction To Cmos Vlsi Design: MIPS Processor ExampleSurbhi PrasadNo ratings yet
- Lect2 PDFDocument51 pagesLect2 PDFShivam KhandelwalNo ratings yet
- CA SolutionDocument14 pagesCA SolutionSaba InamNo ratings yet
- CSE 332 L 14 Short & 15 - 24th & 26th Sep 2020Document28 pagesCSE 332 L 14 Short & 15 - 24th & 26th Sep 2020Nz SaadNo ratings yet
- Computer Architecture: Trần Trọng HiếuDocument65 pagesComputer Architecture: Trần Trọng HiếuQwekem 482No ratings yet
- Eceg 1052 CH 2Document34 pagesEceg 1052 CH 2CHARANo ratings yet
- Instruction Level Parallelism: PipeliningDocument6 pagesInstruction Level Parallelism: PipeliningkbkkrNo ratings yet
- Sen Advances in Stochastic Mixeda Integer ProgrammingDocument58 pagesSen Advances in Stochastic Mixeda Integer Programmingmihai37No ratings yet
- CompreDocument2 pagesCompref20201654No ratings yet
- Chapter2 Instructions Architecture SetDocument104 pagesChapter2 Instructions Architecture SetZhuan WuNo ratings yet
- Everything You Need To Know About Keypad PCBDocument9 pagesEverything You Need To Know About Keypad PCBjackNo ratings yet
- Windows 98Document4 pagesWindows 98SUPERNOVAKHANNo ratings yet
- Package Locfit': R Topics DocumentedDocument78 pagesPackage Locfit': R Topics DocumentedRicardo Jorge BessaNo ratings yet
- DS50 Operators Manitowoc PATDocument21 pagesDS50 Operators Manitowoc PATMauricio Bulla ValenciaNo ratings yet
- Stylus Office t1110 PDFDocument163 pagesStylus Office t1110 PDFstudio 81No ratings yet
- Emissive Materials - VRay For SketchUp ManualDocument11 pagesEmissive Materials - VRay For SketchUp ManualJaime HonigmanNo ratings yet
- Cloudera InstallationDocument180 pagesCloudera Installationsilvere_kassiNo ratings yet
- Macintosh Os X Tiger KeysDocument4 pagesMacintosh Os X Tiger KeysThomas TurbandoNo ratings yet
- AtmanAvr PDFDocument438 pagesAtmanAvr PDFSameer AlmaldeinNo ratings yet
- Deluxe Ham Radio: Nterfacing NterfacingDocument32 pagesDeluxe Ham Radio: Nterfacing NterfacingEric BonneauNo ratings yet
- 8150100083 (1)Document40 pages8150100083 (1)Resal RFNo ratings yet
- Digital Panel Meters BDDocument24 pagesDigital Panel Meters BDMuhammad Fajar Bhayangkara PNo ratings yet
- Vodacom LTE Trial Benchmark Report (2011.03.29) - FinalDocument41 pagesVodacom LTE Trial Benchmark Report (2011.03.29) - FinalSyed Ahsan AliNo ratings yet
- E2 E-Tubes - Protection Against Dirt and DebrisDocument50 pagesE2 E-Tubes - Protection Against Dirt and DebrisigusukNo ratings yet
- Titan Photonics 073 GPON SFP OLT 2.488G 1.244G TransceiverDocument7 pagesTitan Photonics 073 GPON SFP OLT 2.488G 1.244G TransceiverNicolás Cáceres GonzálezNo ratings yet
- Skoda Fabia - Demarorul AlternatorulDocument5 pagesSkoda Fabia - Demarorul AlternatorulbuerebistaNo ratings yet
- RN4870 71 Bluetooth Low Energy Module User Guide DS50002466CDocument75 pagesRN4870 71 Bluetooth Low Energy Module User Guide DS50002466CDev SaneNo ratings yet
- Linux Graphics DemystifiedDocument49 pagesLinux Graphics Demystifiedangkukuey100% (1)
- Citra LogDocument2 pagesCitra LogCésar Alfredo Araya SolerNo ratings yet
- Overflow in CDocument27 pagesOverflow in CjlmansillaNo ratings yet
- OHS Procedures in Installing DevicesDocument7 pagesOHS Procedures in Installing DevicesAmir M. Villas100% (1)
- PROFIL3Document2 pagesPROFIL3Raghavendra J ChikkalkarNo ratings yet
- RX8200 Configuration GuideDocument37 pagesRX8200 Configuration GuideNov FreeNo ratings yet
- HP SwitchDocument3 pagesHP Switchsasha zavatinNo ratings yet
- Microsoft - Visual FoxPro - Insert VFP LowLevelFile To SQL ImageDocument9 pagesMicrosoft - Visual FoxPro - Insert VFP LowLevelFile To SQL ImagecafjnkNo ratings yet
- Difference Between Static and Dynamic RAMDocument2 pagesDifference Between Static and Dynamic RAMMamun RassalNo ratings yet
- Core Balance Current TransformersDocument1 pageCore Balance Current Transformersmspd2003100% (1)
- A Review of Evolution Comes in Non Volatile Semiconductor Memories Like SONOS With The Role of High K-Dielectric MaterialDocument5 pagesA Review of Evolution Comes in Non Volatile Semiconductor Memories Like SONOS With The Role of High K-Dielectric MaterialIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalNo ratings yet
- Cyclades TsDocument454 pagesCyclades TsuzutrooperNo ratings yet