You might also like
- 10 Amazing Raspberry Pi ProjectsDocument12 pages10 Amazing Raspberry Pi Projectsalarue100% (10)
- Register and Its OperationsDocument56 pagesRegister and Its OperationsSARTHAK VARSHNEYNo ratings yet
- TCAD SimulationDocument46 pagesTCAD SimulationmahdichiNo ratings yet
- Lc430duy-Sha1-Lg 125 212 PDFDocument37 pagesLc430duy-Sha1-Lg 125 212 PDFFabio A'lgarinNo ratings yet
- Register Transfer and Micro OperationsDocument49 pagesRegister Transfer and Micro OperationsabhishekNo ratings yet
- COA GTU Study Material Presentations Unit-1 02012020050452AMDocument82 pagesCOA GTU Study Material Presentations Unit-1 02012020050452AMJay Prakash MandalNo ratings yet
- Build A Simple Computer: Lecturer: Pazir AhmadDocument80 pagesBuild A Simple Computer: Lecturer: Pazir AhmadfayeqNo ratings yet
- Adeept Ultimate Kit For Arduino UNODocument143 pagesAdeept Ultimate Kit For Arduino UNOAlan Dario MazzalaiNo ratings yet
- Lcdf3 Chap 07 p1Document26 pagesLcdf3 Chap 07 p1zirfayNo ratings yet
- Lecture 7-3Document23 pagesLecture 7-3Pardeep SinglaNo ratings yet
- Chapter 4Document28 pagesChapter 4WEGENE ARGOWNo ratings yet
- Assignment 01: 1. What Is A Micro Operation? List and Explain Its CategoriesDocument15 pagesAssignment 01: 1. What Is A Micro Operation? List and Explain Its CategoriesYs OpNo ratings yet
- UNIT-II FirstDocument25 pagesUNIT-II FirstKunj Bihari from sagarNo ratings yet
- Co Unit-3Document6 pagesCo Unit-3Sripathi RaviNo ratings yet
- EE 459/500 - HDL Based Digital Design With Programmable Logic FSM, Asm, FSMD, AsmdDocument15 pagesEE 459/500 - HDL Based Digital Design With Programmable Logic FSM, Asm, FSMD, AsmdMushtaq sheikhNo ratings yet
- QuestionsDocument61 pagesQuestionsMadhur YadavNo ratings yet
- Computer Architecture and Organization-17Ec2504A: Prepared by Vbklaruna Asst Professor, EceDocument54 pagesComputer Architecture and Organization-17Ec2504A: Prepared by Vbklaruna Asst Professor, Ece188W1A04B0-SEC-B Vankeswaram Bhargava SandeepNo ratings yet
- Computer Organization & ArchitectureDocument37 pagesComputer Organization & ArchitectureHardik DarjiNo ratings yet
- Computer Architecture and Organization-17ec2504aDocument54 pagesComputer Architecture and Organization-17ec2504aNarasimhareddy MmkNo ratings yet
- Chap 7. Register Transfers and DatapathsDocument43 pagesChap 7. Register Transfers and Datapathsjeroro6730No ratings yet
- Unit1 P2JSPSinghDocument62 pagesUnit1 P2JSPSinghAryan RathoreNo ratings yet
- Computer Architecture 2 Year-Iiird Semester Unit-1Document24 pagesComputer Architecture 2 Year-Iiird Semester Unit-1Dipak SharmaNo ratings yet
- Computer Architecture 2 Year-Iiird Semester Unit-1Document24 pagesComputer Architecture 2 Year-Iiird Semester Unit-1Dipak SharmaNo ratings yet
- Unit 1 CSE211Document97 pagesUnit 1 CSE211professork1020No ratings yet
- Lec 3 RTLDocument22 pagesLec 3 RTLashaba martinNo ratings yet
- Lab 3Document6 pagesLab 3nfylvthmNo ratings yet
- Chapter 4Document44 pagesChapter 4amanterefe99No ratings yet
- Co Unit I Part I NotesDocument46 pagesCo Unit I Part I NotesPushpaLathaNo ratings yet
- Coa 3Document30 pagesCoa 3pahujahimankNo ratings yet
- CSC 218 Notes 5Document15 pagesCSC 218 Notes 5Musa JubrilNo ratings yet
- Reg TransferDocument46 pagesReg TransfershitNo ratings yet
- AAST-CC312-Fall 21 - Lec 02Document26 pagesAAST-CC312-Fall 21 - Lec 02youssef hossamNo ratings yet
- Chapter 2 Register Transfer Language and Micro OperationsDocument19 pagesChapter 2 Register Transfer Language and Micro Operationsendris yimerNo ratings yet
- Chapter 4-9Document222 pagesChapter 4-9amanterefe99No ratings yet
- Register Transfer Language Register Transfer Bus and Memory Transfers Logic Micro-Operations Shift Micro-Operations Arithmetic Logic Shift UnitDocument11 pagesRegister Transfer Language Register Transfer Bus and Memory Transfers Logic Micro-Operations Shift Micro-Operations Arithmetic Logic Shift UnitYash Gupta MauryaNo ratings yet
- Micro OperationsDocument15 pagesMicro OperationsRaju SinghNo ratings yet
- Chapter 4 - Register Transfer and Microoperations Section 4.1 - Register Transfer LanguageDocument14 pagesChapter 4 - Register Transfer and Microoperations Section 4.1 - Register Transfer LanguageRobiul IslamNo ratings yet
- Cao Class NotesDocument16 pagesCao Class NotesPavan KalyanNo ratings yet
- Introduction To Register OperationsDocument23 pagesIntroduction To Register Operations0abubakar221No ratings yet
- Register Transfer and MicrooperationsDocument58 pagesRegister Transfer and Microoperationsnskprasad89No ratings yet
- EEE 70 Advanced Topics in Logic Design: Read Before ClassDocument30 pagesEEE 70 Advanced Topics in Logic Design: Read Before ClassPraveen MeduriNo ratings yet
- Register Transfer and MicrooperationsDocument51 pagesRegister Transfer and MicrooperationsABDUL RAFIONo ratings yet
- Unit 02 - MicrooperationsDocument16 pagesUnit 02 - MicrooperationsBijay MishraNo ratings yet
- Coa Unit 4Document11 pagesCoa Unit 4Pruthviraj ThakurNo ratings yet
- Unit1LMRpdf 2020 01 01 10 43 15pdf 2024 01 02 08 07 33Document27 pagesUnit1LMRpdf 2020 01 01 10 43 15pdf 2024 01 02 08 07 33jaynathavani9711No ratings yet
- Computer System Architecture Chapt 4. Register Transfer & MicrooperationsDocument35 pagesComputer System Architecture Chapt 4. Register Transfer & MicrooperationsWaqas AnjumNo ratings yet
- Lecture 3 - Chapter 4 - REGISTER TRANSFER AND MICROOPERATIONSDocument31 pagesLecture 3 - Chapter 4 - REGISTER TRANSFER AND MICROOPERATIONSsaifsunnyNo ratings yet
- Chapter 4Document13 pagesChapter 4binaboss24No ratings yet
- Computer Arcitecture: Lecture Data Path by Engr. Saleem Afzal Dhillu Class: BS-CS The University of GujratDocument36 pagesComputer Arcitecture: Lecture Data Path by Engr. Saleem Afzal Dhillu Class: BS-CS The University of GujratRabia ChaudharyNo ratings yet
- KCS302-01 (Digital System & Register Transfer)Document9 pagesKCS302-01 (Digital System & Register Transfer)dp06vnsNo ratings yet
- IMPORTANT QUESTIONS Unit 3 and 4 - RemovedDocument11 pagesIMPORTANT QUESTIONS Unit 3 and 4 - RemovedAkash PathakNo ratings yet
- 8085 Processor Unit I: Mr. S. VinodDocument52 pages8085 Processor Unit I: Mr. S. VinodVinod SrinivasanNo ratings yet
- Chapter 2Document7 pagesChapter 2Lui PascherNo ratings yet
- Csa Unit IDocument15 pagesCsa Unit IumeshNo ratings yet
- CH 4Document45 pagesCH 4Kriti GautamNo ratings yet
- Analog Digital NotesDocument20 pagesAnalog Digital NotesTutor SinghNo ratings yet
- 2 - Register Transfer and Microoperations - 1Document31 pages2 - Register Transfer and Microoperations - 1shabanaNo ratings yet
- Computer Architecture I: Digital Design: CPU Registers Register Transfer and MicrooperationsDocument46 pagesComputer Architecture I: Digital Design: CPU Registers Register Transfer and MicrooperationsSaumenRoyNo ratings yet
- Register Transfer LanguageDocument20 pagesRegister Transfer LanguageRAVINo ratings yet
- Sdic V NotesDocument21 pagesSdic V NotesPAVETHRA R SNo ratings yet
- 03 Intruction ExecDocument18 pages03 Intruction Execsanjanamooli77No ratings yet
- Computer Organisation & DesignDocument132 pagesComputer Organisation & DesignVivek YadavNo ratings yet
- Chap 02Document79 pagesChap 02charbelkhalil05No ratings yet
- Food Prices - CG Fall 2021Document21 pagesFood Prices - CG Fall 2021charbelkhalil05No ratings yet
- Food Security and Sustainability Introduction - CG Fall 2021Document18 pagesFood Security and Sustainability Introduction - CG Fall 2021charbelkhalil05No ratings yet
- Chapter 01Document14 pagesChapter 01charbelkhalil05No ratings yet
- Chapter 02 - Introduction To C++ ProgrammingDocument57 pagesChapter 02 - Introduction To C++ Programmingcharbelkhalil05No ratings yet
- A 6-Port Two-Dimensional 3 × 3 Series-Fed Planar Array Antenna For Dual-Polarized X-Band Airborne Synthetic Aperture Radar ApplicationsDocument7 pagesA 6-Port Two-Dimensional 3 × 3 Series-Fed Planar Array Antenna For Dual-Polarized X-Band Airborne Synthetic Aperture Radar ApplicationsROHIT PRAMOD PEDNEKARNo ratings yet
- FRTUDocument4 pagesFRTUanjali sharmaNo ratings yet
- Training Material of MS39R Chassis 20140612041550121Document73 pagesTraining Material of MS39R Chassis 20140612041550121Mohamed Salah EldeenNo ratings yet
- Datasheet-Lf24t350fhexxp 1643778044Document3 pagesDatasheet-Lf24t350fhexxp 1643778044Renzer NeznerNo ratings yet
- Unit7 PPT Voltage RegulatorDocument30 pagesUnit7 PPT Voltage Regulatormanjunath. gondihosalliNo ratings yet
- Seminar TopicDocument36 pagesSeminar TopicNarasing ManeNo ratings yet
- Different SFR (Special Function Register) Used in ADC InterfacingDocument10 pagesDifferent SFR (Special Function Register) Used in ADC InterfacingPiyush PatelNo ratings yet
- Maxhub Education BrochureDocument12 pagesMaxhub Education BrochureGirish JainNo ratings yet
- Fire AlarmDocument43 pagesFire Alarmritesh chauhanNo ratings yet
- Suggested Spec IntraLink LC3000 PLC - SCADADocument24 pagesSuggested Spec IntraLink LC3000 PLC - SCADAtuniya4No ratings yet
- 11.result Inventory Assy TV Speaker November 2020Document424 pages11.result Inventory Assy TV Speaker November 2020Toni PriatnaNo ratings yet
- Mother BoardDocument9 pagesMother BoardAvinash BhagatNo ratings yet
- Solar Based Uninterrupted Power SupplyDocument8 pagesSolar Based Uninterrupted Power SupplyShubhda ChandaneNo ratings yet
- R1-111208 CoMP Simulation AssumptionDocument6 pagesR1-111208 CoMP Simulation AssumptionKrishna GomadamNo ratings yet
- NCP561 150 Ma CMOS Low Iq Low-Dropout Voltage Regulator: TSOP-5 SN Suffix CASE 483Document11 pagesNCP561 150 Ma CMOS Low Iq Low-Dropout Voltage Regulator: TSOP-5 SN Suffix CASE 483Сергей БрегедаNo ratings yet
- Anritsu BTS Master MT8220T Product Brochure 11410-00717TDocument40 pagesAnritsu BTS Master MT8220T Product Brochure 11410-00717TarzeszutNo ratings yet
- DM 3730Document280 pagesDM 3730dvdiyenNo ratings yet
- Schematic Diagram: MODEL: 29A3DE / 29A3E / 29A3SHDocument19 pagesSchematic Diagram: MODEL: 29A3DE / 29A3E / 29A3SHCristhan Dwi AryaNo ratings yet
- CATALOG TRANZ IntegraDocument12 pagesCATALOG TRANZ IntegraViorelNo ratings yet
- Mute Detector IC: BA336 / BA338 / BA338LDocument7 pagesMute Detector IC: BA336 / BA338 / BA338LDezmireanLauraNo ratings yet
- Trek 610e High Voltage Power AmplifierDocument2 pagesTrek 610e High Voltage Power AmplifierKathleen RamirezNo ratings yet
- 300ma, Low Noise, Ultra-Fast CMOS LDO Regulator: General Description Ordering InformationDocument18 pages300ma, Low Noise, Ultra-Fast CMOS LDO Regulator: General Description Ordering Informationmarino246No ratings yet
- Versamax Io Guide 0Document36 pagesVersamax Io Guide 0joberhrNo ratings yet
- Dgca Module 04 Part 01Document15 pagesDgca Module 04 Part 01PrakashJaiswalNo ratings yet
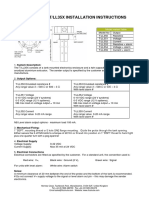
- T/Ll35X Installation Instructions: Model Variant TableDocument1 pageT/Ll35X Installation Instructions: Model Variant TableMilton FhaileNo ratings yet