You might also like
- MTM Lab PresentationDocument26 pagesMTM Lab PresentationMuhammad WaseemNo ratings yet
- 9 Analytical and Experimental Determination of Cutting ForcesDocument14 pages9 Analytical and Experimental Determination of Cutting ForcesPRASAD326100% (1)
- 19 Kinematic System and Operations of Milling Machines.Document23 pages19 Kinematic System and Operations of Milling Machines.PRASAD326100% (5)
- Lect22 Surface RoughnessDocument16 pagesLect22 Surface RoughnessAnshul SharmaNo ratings yet
- Cam Lab ManualDocument14 pagesCam Lab Manualelangandhi0% (1)
- 6 Orthogonal and Oblique CuttingDocument12 pages6 Orthogonal and Oblique CuttingPRASAD326100% (6)
- CNC Common Terms PDFDocument2 pagesCNC Common Terms PDFShaival JhaNo ratings yet
- Comparative Study of CNC Controllers Used in CNC Milling MachineDocument9 pagesComparative Study of CNC Controllers Used in CNC Milling MachineAJER JOURNALNo ratings yet
- User's Manual OverviewDocument789 pagesUser's Manual OverviewMACKAY9999No ratings yet
- Feed Rate CalculationsDocument4 pagesFeed Rate CalculationsJesus Said Mercado VegaNo ratings yet
- Long Chamfer Tools for Back & Front ChamferingDocument4 pagesLong Chamfer Tools for Back & Front ChamferingcljserviceNo ratings yet
- NC, CNC & Robotics: An IntroductionDocument143 pagesNC, CNC & Robotics: An IntroductionshafiqNo ratings yet
- My CNC TurningDocument7 pagesMy CNC Turningde_stanszaNo ratings yet
- Fanuc Touch Probe Cycles GuideDocument6 pagesFanuc Touch Probe Cycles Guidesonnv_hcmuteNo ratings yet
- Near Dry Electrical Discharge Machining: Jeffy Joseph S7M1,06400045Document30 pagesNear Dry Electrical Discharge Machining: Jeffy Joseph S7M1,06400045hemantabhaleNo ratings yet
- 2.2 Force, Power in Metal Cutting Q&A For StudentDocument7 pages2.2 Force, Power in Metal Cutting Q&A For StudentnikhilbathamNo ratings yet
- Cutting Speeds and Feeds GuideDocument4 pagesCutting Speeds and Feeds GuideAnonymous dh6DITNo ratings yet
- 26 Broaching - Principles, Systems and ApplicationsDocument16 pages26 Broaching - Principles, Systems and ApplicationsPRASAD326100% (2)
- Calculation Manufacturing ProcessDocument18 pagesCalculation Manufacturing ProcessEncik MaaNo ratings yet
- Cutting Force of End Cutting Tool Milling MachiningDocument24 pagesCutting Force of End Cutting Tool Milling MachiningGabryel BogdanNo ratings yet
- 24 Forces Developing and Acting in Machine ToolsDocument13 pages24 Forces Developing and Acting in Machine ToolsPRASAD326100% (4)
- Economics of Metal Cutting OptimizationDocument64 pagesEconomics of Metal Cutting OptimizationrohanNo ratings yet
- CNC Mill ProgrammingDocument24 pagesCNC Mill ProgrammingZahidah AmaninaNo ratings yet
- Introduction To Introduction To Computer Numerical Control: Computer Aided Manufacturing TECH 4/53350 1Document11 pagesIntroduction To Introduction To Computer Numerical Control: Computer Aided Manufacturing TECH 4/53350 1BabuRaoThellaNo ratings yet
- Cadcam Module 2Document433 pagesCadcam Module 2Ahsan IftikharNo ratings yet
- Haas Mill WIPS Probe Training ManualDocument44 pagesHaas Mill WIPS Probe Training ManualpocerilloNo ratings yet
- Hass AnswersDocument7 pagesHass AnswersRelu ChiruNo ratings yet
- Deep Hole Machining ENGDocument150 pagesDeep Hole Machining ENGCristian Fuentes100% (1)
- A Method For Predicting Chatter Stability For Systems SchmitzDocument8 pagesA Method For Predicting Chatter Stability For Systems SchmitzOvidiu RusuNo ratings yet
- 201512913475958393Document42 pages201512913475958393mvamsipNo ratings yet
- Hurco Lathe Conversational r0115-201Document84 pagesHurco Lathe Conversational r0115-201rastaeggNo ratings yet
- Lab 6 - Face Milling On CNC MachineDocument5 pagesLab 6 - Face Milling On CNC MachineHaris NaveedNo ratings yet
- Chapter Two 2. Manual NC Part ProgrammingDocument33 pagesChapter Two 2. Manual NC Part ProgrammingMulugeta WoldeNo ratings yet
- CNC MillingDocument48 pagesCNC MillingHKHKBOOKSNo ratings yet
- Incremental Sheet Forming on CNC Milling MachinesDocument4 pagesIncremental Sheet Forming on CNC Milling MachinesDionysius WahyoeNo ratings yet
- Apostila PowerMILL 5.5 - 5 EixosDocument126 pagesApostila PowerMILL 5.5 - 5 EixosRoberto SilvaNo ratings yet
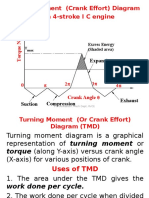
- Turning Moment Diagram & FlywheelDocument88 pagesTurning Moment Diagram & FlywheelAshishAgarwal100% (1)
- The Use of Variables, Macros and Subroutines and Compatibility With FANUC Parametric Programming ......................... 3Document10 pagesThe Use of Variables, Macros and Subroutines and Compatibility With FANUC Parametric Programming ......................... 3Jérôme GRANGENo ratings yet
- Automation and Robotics 2020Document58 pagesAutomation and Robotics 2020Nitin rajputNo ratings yet
- Introduction of CNC Milling To First-Year Engineering Students With Interests inDocument10 pagesIntroduction of CNC Milling To First-Year Engineering Students With Interests ineliiiiiiNo ratings yet
- HAAS CNC MAGAZINE 1997 Issue 3 - Fall PDFDocument19 pagesHAAS CNC MAGAZINE 1997 Issue 3 - Fall PDFguytr2No ratings yet
- Contour Milling Programming On A CNC MachineDocument3 pagesContour Milling Programming On A CNC Machinebhaskarjalan0% (1)
- CNC Machining Designing For SpeedDocument9 pagesCNC Machining Designing For SpeedjaimeNo ratings yet
- CNC Router calculations for rapid speeds and cutting forcesDocument4 pagesCNC Router calculations for rapid speeds and cutting forcesmorteza nourooziNo ratings yet
- Computer Numerical Control Machine: By-Er - Ved PrakashDocument28 pagesComputer Numerical Control Machine: By-Er - Ved Prakashyogesh borseNo ratings yet
- Machine Tools, Metal Cutting Types World Summary: Market Values & Financials by CountryFrom EverandMachine Tools, Metal Cutting Types World Summary: Market Values & Financials by CountryNo ratings yet
- International Progress in Precision Engineering: Proceedings of the 7th International Precision Engineering Seminar, Kobe, Japan, May 1993From EverandInternational Progress in Precision Engineering: Proceedings of the 7th International Precision Engineering Seminar, Kobe, Japan, May 1993No ratings yet
- Chapter 5: Tool Dynamometers: Learning ObjectivesDocument6 pagesChapter 5: Tool Dynamometers: Learning ObjectivesOmkarNo ratings yet
- Dynamo MeterDocument30 pagesDynamo MeterTarek ElbusefiNo ratings yet
- F.Y. M.Tech (Mechanical) Design Engg Force, Torque, and Strain MeasurementsDocument12 pagesF.Y. M.Tech (Mechanical) Design Engg Force, Torque, and Strain MeasurementsVinay ShewaleNo ratings yet
- Microscopic View of Flank Wear AreaDocument4 pagesMicroscopic View of Flank Wear Areajacobian1810No ratings yet
- Unit-III (B-Part) Electrical Measurement & Measuring Instruments EEE-101/ EEE-201Document16 pagesUnit-III (B-Part) Electrical Measurement & Measuring Instruments EEE-101/ EEE-201Deep ChowdhuryNo ratings yet
- Cantilever Beam Experiment B58SBDocument9 pagesCantilever Beam Experiment B58SBSunNo ratings yet
- Group Technology in MFG SystemsDocument14 pagesGroup Technology in MFG SystemssanoojsiddikhNo ratings yet
- UNIT I 1.9 Production Flow AnalysisDocument13 pagesUNIT I 1.9 Production Flow Analysisprof_panneerNo ratings yet
- Group Technology and Cellular Manufacturing LayoutsDocument78 pagesGroup Technology and Cellular Manufacturing Layoutsprof_panneerNo ratings yet
- Investigation On The Effect of Ionic LiquidsDocument12 pagesInvestigation On The Effect of Ionic Liquidsprof_panneerNo ratings yet
- UNIT I 1.2 Process Planning and Production PlanningDocument52 pagesUNIT I 1.2 Process Planning and Production Planningprof_panneerNo ratings yet
- Group TechnologyDocument27 pagesGroup TechnologyVelsami AmmasaiGounder100% (1)
- UNIT I 1.1 Process Planning in The Manufacturing CycleDocument34 pagesUNIT I 1.1 Process Planning in The Manufacturing Cycleprof_panneerNo ratings yet
- Unit I 1.5 Group Technology, Part Classi, CodingDocument36 pagesUnit I 1.5 Group Technology, Part Classi, Codingprof_panneer0% (1)
- Unit I 1.4 CappDocument32 pagesUnit I 1.4 Cappprof_panneerNo ratings yet
- Unit I 1-Cutting Tool Angles and Their SignificanceDocument48 pagesUnit I 1-Cutting Tool Angles and Their Significanceprof_panneer50% (2)
- 5 Why's Root Cause Analysis ToolDocument14 pages5 Why's Root Cause Analysis ToolMd Majharul Islam100% (2)
- Geometric Tolerances and DimensionsDocument40 pagesGeometric Tolerances and Dimensionsprof_panneerNo ratings yet
- Design For MachiningDocument43 pagesDesign For Machiningprof_panneer50% (2)
- Theory of Metal CuttingDocument69 pagesTheory of Metal Cuttingprof_panneer0% (1)
- Unit I 1-Cutting Tool Angles and Their SignificanceDocument48 pagesUnit I 1-Cutting Tool Angles and Their Significanceprof_panneer50% (2)
- Cutting Tool Angles SignificanceDocument37 pagesCutting Tool Angles SignificanceHeineken Ya PraneetpongrungNo ratings yet
- (WWW - Entrance-Exam - Net) - PTU B.Tech ECE-5th Semester-Antenna and Wave Propagation (EC-303) Sample Paper 1Document2 pages(WWW - Entrance-Exam - Net) - PTU B.Tech ECE-5th Semester-Antenna and Wave Propagation (EC-303) Sample Paper 1Sivarama Krishnan SNo ratings yet
- Review On Heat TransferDocument76 pagesReview On Heat Transferprof_panneer100% (1)
- Measuring Cutting Forces PDFDocument14 pagesMeasuring Cutting Forces PDFprof_panneerNo ratings yet
- Group Technology - Flexible Manufacturing SystemDocument11 pagesGroup Technology - Flexible Manufacturing SystemGiovani CarpinNo ratings yet
- Group TechnologyDocument27 pagesGroup TechnologyVelsami AmmasaiGounder100% (1)
- Unit 9 CRCDocument21 pagesUnit 9 CRCEr Manpreet ChahalNo ratings yet
- Applications of Finite Element Methods For Academic & Industrial ResearchDocument2 pagesApplications of Finite Element Methods For Academic & Industrial Researchprof_panneerNo ratings yet
- 1 Computer Aided Process PlanningDocument23 pages1 Computer Aided Process Planningprof_panneerNo ratings yet