You might also like
- Automotive Electronic Diagnostics (Course 2)From EverandAutomotive Electronic Diagnostics (Course 2)Rating: 4 out of 5 stars4/5 (2)
- Manuali Officina Yj/Xj 1993Document12 pagesManuali Officina Yj/Xj 1993stormchidNo ratings yet
- Speed Control - TDV6 3.0L DieselDocument18 pagesSpeed Control - TDV6 3.0L DieselAlberto Mock GonzalesNo ratings yet
- Hillier's Fundamentals of Automotive Electronics - 2nd EditionDocument12 pagesHillier's Fundamentals of Automotive Electronics - 2nd EditionChandrasekhar Nallam88% (8)
- Adaptive Cruise ControlDocument25 pagesAdaptive Cruise ControlAnu Prasad100% (1)
- Cruise Control Operation From Zero To Preset Speed-Simulation and ImplementationDocument6 pagesCruise Control Operation From Zero To Preset Speed-Simulation and ImplementationVijay KulkarniNo ratings yet
- Chapter 3 - Cruise Control SystemsDocument25 pagesChapter 3 - Cruise Control Systemskhalifawhan0% (1)
- 4g69 Emission Control Mitsubishi Space WagonDocument10 pages4g69 Emission Control Mitsubishi Space WagonMrihexNo ratings yet
- Adaptive Cruise ControlDocument7 pagesAdaptive Cruise ControlRohit SharmaNo ratings yet
- Adaptive Cruise Control SystemDocument5 pagesAdaptive Cruise Control SystemSathish KumarNo ratings yet
- Control of DC Motor Using Different Control StrategiesFrom EverandControl of DC Motor Using Different Control StrategiesNo ratings yet
- Adaptive Cruise ControlDocument20 pagesAdaptive Cruise ControlMohammad ThanzimNo ratings yet
- Adaptive Cruise Control SystemDocument20 pagesAdaptive Cruise Control SystemRajesh KumarNo ratings yet
- Adaptive Cruise Control System: Nikhil RDocument20 pagesAdaptive Cruise Control System: Nikhil RsidjivNo ratings yet
- Adaptive Cruise Control Sys OverviewDocument6 pagesAdaptive Cruise Control Sys OverviewJoshua MillerNo ratings yet
- Techs em ReportDocument17 pagesTechs em ReportShiva NageswararaoNo ratings yet
- Design of Adaptive Cruise Control (Acc)Document2 pagesDesign of Adaptive Cruise Control (Acc)Sandhya ShyamasundarNo ratings yet
- Adaptive Cruise Control: Synopsis ForDocument5 pagesAdaptive Cruise Control: Synopsis ForKaushik GowdaNo ratings yet
- AEEDA501 - Repairing Vehicle Drive Assistance SystemsDocument86 pagesAEEDA501 - Repairing Vehicle Drive Assistance SystemsTUYIRINGIRE JeromeNo ratings yet
- Study of Cruise Control System Used Vehicle: Ajinkya Chandratre Ajit Bhatjire Pankaj ChaudharyDocument9 pagesStudy of Cruise Control System Used Vehicle: Ajinkya Chandratre Ajit Bhatjire Pankaj ChaudharySitota tesfayeNo ratings yet
- SSP 276 Phaeton Proximity ControlDocument40 pagesSSP 276 Phaeton Proximity Controlภูเก็ต เป็นเกาะ100% (1)
- Automatic Anti-Collision System (ACS) : DescriptionDocument3 pagesAutomatic Anti-Collision System (ACS) : DescriptionAhmad Yani S NoorNo ratings yet
- Adaptive Cruise Control ReportDocument20 pagesAdaptive Cruise Control ReportRohan BalramNo ratings yet
- Electronic Power Assist Steering (EPAS) SystemDocument21 pagesElectronic Power Assist Steering (EPAS) SystemCamilo RamosNo ratings yet
- ACC Eng 04 880976Document2 pagesACC Eng 04 880976redman7207No ratings yet
- Seminar Report FINALDocument23 pagesSeminar Report FINALGarvit BhattNo ratings yet
- Diagnostic Tests of The ACC Radar System: Computer Applications in Electrical Engineering Vol. 14 2016Document11 pagesDiagnostic Tests of The ACC Radar System: Computer Applications in Electrical Engineering Vol. 14 2016Kld AliNo ratings yet
- Road Wheel Control Systems: Tutor NotesDocument3 pagesRoad Wheel Control Systems: Tutor NotesAchmad ZajidNo ratings yet
- Chapter 1Document52 pagesChapter 1Bharath VasanNo ratings yet
- Servomechanism Presentation MCS - 1Document19 pagesServomechanism Presentation MCS - 1HKD89100% (3)
- Pruebas ABS C2777Document58 pagesPruebas ABS C2777Alirio VilchezNo ratings yet
- Case Study Adaptive Cruise ControlDocument15 pagesCase Study Adaptive Cruise ControlsarathkumarNo ratings yet
- Cruise Control SystemDocument9 pagesCruise Control SystemTilahun WorkuNo ratings yet
- Servomechanism Presentation MCS 1Document38 pagesServomechanism Presentation MCS 1Vipin Ramachandran PillaiNo ratings yet
- Adaptive Cruise Control System Using Fuzzy Logic: M Abdelwahab, M Abdelaziz, N.ElnahasDocument3 pagesAdaptive Cruise Control System Using Fuzzy Logic: M Abdelwahab, M Abdelaziz, N.ElnahasMcmimi91No ratings yet
- M01CDE CouerseWKDocument62 pagesM01CDE CouerseWKKashyap GadaNo ratings yet
- 211-02 Power Steering 2016 Mustang Description and OperationDocument56 pages211-02 Power Steering 2016 Mustang Description and OperationJaciel LMNo ratings yet
- Adaptive CruiseDocument8 pagesAdaptive CruiseVikram ReddyNo ratings yet
- Unit 12: Lesson 1 Design and Operation of Electronic Suspension ControlsDocument17 pagesUnit 12: Lesson 1 Design and Operation of Electronic Suspension Controls2791957No ratings yet
- 24 ACC WorkbookDocument13 pages24 ACC WorkbookAttila KovácsNo ratings yet
- Control Systems EngineeringDocument15 pagesControl Systems EngineeringalikaastridNo ratings yet
- Adaptive Cruise Control Using Model Predictive ControllerDocument3 pagesAdaptive Cruise Control Using Model Predictive ControllerInternational Journal of Innovative Science and Research TechnologyNo ratings yet
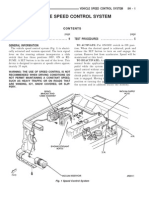
- Fig. 2 Vehicle Speed Control-2.2L and 2.5LDocument10 pagesFig. 2 Vehicle Speed Control-2.2L and 2.5LChristian MartinezNo ratings yet
- Speed Control SystemDocument8 pagesSpeed Control SystemDalton WiseNo ratings yet
- ACC Final ReportDocument13 pagesACC Final ReportDeVvrat Akheriya100% (2)
- ECAS (Ing)Document28 pagesECAS (Ing)nicu100% (1)
- Eeee PDFDocument4 pagesEeee PDFFawaz PartoNo ratings yet
- Volvo - My05 07B5254T S40V50C70C30Document30 pagesVolvo - My05 07B5254T S40V50C70C30sharck04100% (1)
- Adaptive Cruise Control (ACC)Document14 pagesAdaptive Cruise Control (ACC)agamal_33No ratings yet
- Ecu 750 Instruction ManualDocument8 pagesEcu 750 Instruction ManualAu GroupsNo ratings yet
- An Adaptive Cruise Control System For AutonomousDocument8 pagesAn Adaptive Cruise Control System For Autonomous20145327No ratings yet
- Case Study On Cruise Control of A VehicleDocument23 pagesCase Study On Cruise Control of A VehicleRAVINDERNo ratings yet
- System For Vehicle Safety and Traffic Co-Ordination: Prashant Gade, Inali WahaneDocument4 pagesSystem For Vehicle Safety and Traffic Co-Ordination: Prashant Gade, Inali WahanetheijesNo ratings yet
- FP FINAL-converted (2) - Converted (2) - Converted-MergedDocument22 pagesFP FINAL-converted (2) - Converted (2) - Converted-MergedAbdullah Raghib SiddiquiNo ratings yet
- Module 4 VEHICLE MOTION CONTROLDocument23 pagesModule 4 VEHICLE MOTION CONTROLDeepa ShreeNo ratings yet
- Automatic Vehicle Speed Control System 33Document10 pagesAutomatic Vehicle Speed Control System 33Varshini VuraNo ratings yet
- 2007 RobertBosch ESPDocument8 pages2007 RobertBosch ESPmovebe6870No ratings yet