You might also like
- Unmanned Aerial Systems: Theoretical Foundation and ApplicationsFrom EverandUnmanned Aerial Systems: Theoretical Foundation and ApplicationsNo ratings yet
- A Vision-Based Automatic Landing Method For Fixed Wing UAVsDocument15 pagesA Vision-Based Automatic Landing Method For Fixed Wing UAVsAli YasinNo ratings yet
- Sensors: A Multi-Step CNN-Based Estimation of Aircraft Landing Gear AnglesDocument17 pagesSensors: A Multi-Step CNN-Based Estimation of Aircraft Landing Gear AnglesKrasakKrusuk Si MaulNo ratings yet
- Seare Girum Gebrehaweria Department of Electronics and Communication Engineering Mekelle Institute of TechnologyDocument9 pagesSeare Girum Gebrehaweria Department of Electronics and Communication Engineering Mekelle Institute of TechnologySeare GirumNo ratings yet
- Autonomous UAV With Human Detection: Kshitij Karnawat, Nihar Asare, Sumit Anilkumar Singh, and Anju KulkarniDocument7 pagesAutonomous UAV With Human Detection: Kshitij Karnawat, Nihar Asare, Sumit Anilkumar Singh, and Anju KulkarniexampleNo ratings yet
- SYS 500 Fundamentals of System Engineering: Team 5 Abdulrahman Almijlad Lang Chen Junming CuiDocument8 pagesSYS 500 Fundamentals of System Engineering: Team 5 Abdulrahman Almijlad Lang Chen Junming CuiAnonymous jyVYEsNo ratings yet
- Autopilot: Controls That Holds The Aircraft On Any Selected MagneticDocument13 pagesAutopilot: Controls That Holds The Aircraft On Any Selected MagneticDiptoNo ratings yet
- InTech-Fly The Camera Perspective Control of A Remotely Operated Quadrotor Uav and Camera UnitDocument29 pagesInTech-Fly The Camera Perspective Control of A Remotely Operated Quadrotor Uav and Camera UnitedwardsilvaNo ratings yet
- ArducopterDocument16 pagesArducopterSummer CoolNo ratings yet
- Design and Development of The Hardware For Vision Based UAV AutopilotDocument6 pagesDesign and Development of The Hardware For Vision Based UAV AutopilotJoshua DanielNo ratings yet
- VISION-BASED AUTONOMOUS LANDINGDocument6 pagesVISION-BASED AUTONOMOUS LANDINGShubham SinghalNo ratings yet
- Wireless SURVEILLANCE MicroDocument3 pagesWireless SURVEILLANCE MicroJohn BrittoNo ratings yet
- SENSOR-ENABLED FLYING ROBOT MONITORS ENVIRONMENTDocument28 pagesSENSOR-ENABLED FLYING ROBOT MONITORS ENVIRONMENTMahaManthraNo ratings yet
- Fundamental Aspects Required When Designing An Autonomous QuadcopterDocument5 pagesFundamental Aspects Required When Designing An Autonomous QuadcopterRikko PutraNo ratings yet
- Cardiff University UAV Design & Testing with LabVIEW & FlightGear SimDocument1 pageCardiff University UAV Design & Testing with LabVIEW & FlightGear SimSareer KhanNo ratings yet
- Mics2010 Submission 36 PDFDocument11 pagesMics2010 Submission 36 PDFPravin PatilNo ratings yet
- (J) - 2024 - Vision-Based Autonomous Landing and Charging System For A Hexacopter DroneDocument13 pages(J) - 2024 - Vision-Based Autonomous Landing and Charging System For A Hexacopter Dronedr.awawdeh.moathNo ratings yet
- PID ControllerDocument3 pagesPID ControllerBart llNo ratings yet
- ICRA Andrew MillerDocument24 pagesICRA Andrew MillerRajesh BhanushaliNo ratings yet
- FYP Project: A Cockpit Controlled Radio AirplaneDocument14 pagesFYP Project: A Cockpit Controlled Radio AirplanedelwyntanNo ratings yet
- Instrument Rating: Ninty Nine Flying SchoolDocument89 pagesInstrument Rating: Ninty Nine Flying SchoolMohamed HassanNo ratings yet
- ICUAS14 Kendall Salvapantula StolDocument8 pagesICUAS14 Kendall Salvapantula StolSomefun OluwasegunNo ratings yet
- 5.15 Typical Aircraft Instrument SystemsDocument44 pages5.15 Typical Aircraft Instrument Systemssyed kazmi100% (1)
- Vikram Patil UavDocument6 pagesVikram Patil Uavkaran11deshmukhNo ratings yet
- New Microsoft Word DocumentDocument3 pagesNew Microsoft Word DocumentakashNo ratings yet
- Wireless Control Quadcopter With Stereo Camera: P.Manoj, S.GokulakannanDocument24 pagesWireless Control Quadcopter With Stereo Camera: P.Manoj, S.GokulakannanManojNo ratings yet
- Autonomous Hovering of A Vision/IMU Guided QuadrotorDocument6 pagesAutonomous Hovering of A Vision/IMU Guided QuadrotorKok Kai YitNo ratings yet
- ImplementationofAutonomousVisualDetection v6 RGDocument7 pagesImplementationofAutonomousVisualDetection v6 RGIshali SandbhorNo ratings yet
- Unnamed DroneDocument16 pagesUnnamed DroneManas JainNo ratings yet
- Drones: - Name: Sahana R - Reg No.Document15 pagesDrones: - Name: Sahana R - Reg No.sanadstaarrNo ratings yet
- Honeywell VDGSDocument5 pagesHoneywell VDGSNate ShriNo ratings yet
- AutopilotDocument21 pagesAutopilotShabrish ShabriNo ratings yet
- CHAPTER 9. Display Systems: 9.1. Situational AwarenessDocument12 pagesCHAPTER 9. Display Systems: 9.1. Situational AwarenessKing KrishnaNo ratings yet
- Autopilot Avionics SMF 3252 06/07-IIDocument42 pagesAutopilot Avionics SMF 3252 06/07-IImohd roziNo ratings yet
- Paper Presentation FIN ACTUATION CONTROL SYSTEM FOR GUIDED PROJECTILESDocument6 pagesPaper Presentation FIN ACTUATION CONTROL SYSTEM FOR GUIDED PROJECTILESjasveer2589No ratings yet
- 01 3 2 PDFDocument8 pages01 3 2 PDFak1828No ratings yet
- Introduction to UAVs Future UsesDocument12 pagesIntroduction to UAVs Future UsesPrajwal BirwadkarNo ratings yet
- Design of Basic Quadcopter Architecture: Assignment-3Document6 pagesDesign of Basic Quadcopter Architecture: Assignment-3Praveen J LNo ratings yet
- Part - I: - Principle of AvionicsDocument36 pagesPart - I: - Principle of AvionicsNiranjan MukeshNo ratings yet
- Rancang Bangun Uav Quadcopter Berbasis ArduinoDocument10 pagesRancang Bangun Uav Quadcopter Berbasis ArduinoAchmad Rozi NurhudaNo ratings yet
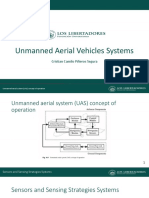
- Unmanned Aerial Vehicles Systems: Cristian Camilo Piñeros SeguraDocument13 pagesUnmanned Aerial Vehicles Systems: Cristian Camilo Piñeros Seguracristian camilo piñeros seguraNo ratings yet
- PPT-UNIT-1 L-7 To 8Document29 pagesPPT-UNIT-1 L-7 To 8Saheer ShaikNo ratings yet
- Drone Mini Project Report Analysis and DesignDocument31 pagesDrone Mini Project Report Analysis and DesignMed Rabeh100% (1)
- Guidance and Navigation of Aerospace Vehicles: March 2015Document41 pagesGuidance and Navigation of Aerospace Vehicles: March 2015sohaiblatif31No ratings yet
- Spherical VTOL UAV Summer Project DesignDocument11 pagesSpherical VTOL UAV Summer Project DesignPranab PrustyNo ratings yet
- Development of A Low-Cost Embedded Flight Controller For QuadcopterDocument6 pagesDevelopment of A Low-Cost Embedded Flight Controller For Quadcopter029Muhammad Robith Fikris SholihNo ratings yet
- Control and Navigation System For A Fixed-Wing Unmanned Aerial VehicleDocument11 pagesControl and Navigation System For A Fixed-Wing Unmanned Aerial VehicleAfif PradhanaNo ratings yet
- Adaptive image-based visual servoing for underactuated UAVsDocument30 pagesAdaptive image-based visual servoing for underactuated UAVsMahdi LabedNo ratings yet
- IAFS-Aerial Navigation-VORDocument27 pagesIAFS-Aerial Navigation-VORioannaknt622No ratings yet
- Unmanned Miniature Drone Flight Type: Proposed Project Final YearDocument7 pagesUnmanned Miniature Drone Flight Type: Proposed Project Final YearNamrta JainNo ratings yet
- Drone FeasibilityDocument30 pagesDrone FeasibilityAbhishek PatiyalNo ratings yet
- Wireless Controlled Quad-CopterDocument8 pagesWireless Controlled Quad-CopternamithamahaleNo ratings yet
- Control and Navigation System For A Fixed-Wing Unmanned Aerial VehicleDocument11 pagesControl and Navigation System For A Fixed-Wing Unmanned Aerial VehicleJU EE 2021No ratings yet
- Amphibious Surveillance Hovercraft, Major Project, Final Year, Btech-EC, 2011-12Document32 pagesAmphibious Surveillance Hovercraft, Major Project, Final Year, Btech-EC, 2011-12Saurabh SrivastavaNo ratings yet
- Visual Tracking and Control of a Quadcopter Using Stereo CameraDocument8 pagesVisual Tracking and Control of a Quadcopter Using Stereo CameraYovi Herlin SaputraNo ratings yet
- UAV or DRONE TECHNOLOGYDocument21 pagesUAV or DRONE TECHNOLOGYCHANDRAMOL VRNo ratings yet
- Display FlightInstrumentsDocument116 pagesDisplay FlightInstrumentsDpt HtegnNo ratings yet
- Unmanned Aerial VehicleDocument178 pagesUnmanned Aerial Vehicletanveershariff13No ratings yet
- Teknologi Drone Untuk Kepolisian: Tim Dosen Tekpol Stik-Ptik Jakarta 2021Document59 pagesTeknologi Drone Untuk Kepolisian: Tim Dosen Tekpol Stik-Ptik Jakarta 2021Still WhyNo ratings yet
- Aerial Perspectives - Mastering Drone PhotographyFrom EverandAerial Perspectives - Mastering Drone PhotographyNo ratings yet
- Advances in Robot Control From Everyday Physics To Human Like Movements PDFDocument359 pagesAdvances in Robot Control From Everyday Physics To Human Like Movements PDFPedro ValdezNo ratings yet
- Fruit Detection and Robotic Apple Harvesting SystemDocument14 pagesFruit Detection and Robotic Apple Harvesting SystemSindhu BhaskarNo ratings yet
- Robot PDFDocument101 pagesRobot PDFMuhammad ZulfiqarNo ratings yet
- Harvesting robot for cherry tomatoesDocument2 pagesHarvesting robot for cherry tomatoesamen abbasiNo ratings yet
- Modeling and Path Simulation of An Autonomous Tomato Picking RobotDocument12 pagesModeling and Path Simulation of An Autonomous Tomato Picking RobotTJPRC PublicationsNo ratings yet
- BookDocument378 pagesBookGerardo Garcia100% (1)
- Towards Autonomous Visual Navigation in Arable FieldsDocument8 pagesTowards Autonomous Visual Navigation in Arable FieldsSyed Muhammad AlamNo ratings yet
- Peyman Alizadeh MSc. Thesis Corrected - 2 - 2Document126 pagesPeyman Alizadeh MSc. Thesis Corrected - 2 - 2DEBONo ratings yet
- Applied Sciences: Sensor-Guided Assembly of Segmented Structures With Industrial RobotsDocument18 pagesApplied Sciences: Sensor-Guided Assembly of Segmented Structures With Industrial RobotsMihail AvramovNo ratings yet
- Visual Servoing Pick and Place Robot Under Partial OcclusionDocument54 pagesVisual Servoing Pick and Place Robot Under Partial OcclusionUsama AliNo ratings yet
- Multi Target Tracking ThesisDocument6 pagesMulti Target Tracking Thesiskatrinagreeneugene100% (2)
- Information and Program: Robotics 1Document13 pagesInformation and Program: Robotics 1Bharath KumarNo ratings yet
- Indoor Robot Gardening: Design and Implementation: Nikolaus Correll Felipe Dominguez Timothy RobertsonDocument14 pagesIndoor Robot Gardening: Design and Implementation: Nikolaus Correll Felipe Dominguez Timothy RobertsonFLASNo ratings yet
- Handbook On Visual Servoing and Visula TrackingDocument28 pagesHandbook On Visual Servoing and Visula TrackingshouvikchaudhuriNo ratings yet
- Visual Servoing Robot For Pick and Place Under Partial Occlusion - IiDocument18 pagesVisual Servoing Robot For Pick and Place Under Partial Occlusion - IiUsama AliNo ratings yet
- MATLAB Robotics ToolkitDocument316 pagesMATLAB Robotics ToolkitIsmael Minchala Avila100% (1)
- Machine Vision Toolbox For MATLABr3Document189 pagesMachine Vision Toolbox For MATLABr3betogetherbeurselfNo ratings yet
- R00013-Fuzzy Neural-Cast 1Document70 pagesR00013-Fuzzy Neural-Cast 1Roxana BoicuNo ratings yet
- Computer Vision Module Application For Finding A Target in A Live CameraDocument8 pagesComputer Vision Module Application For Finding A Target in A Live CameraGopi KrishnaNo ratings yet
- RTSXcmdrefDocument86 pagesRTSXcmdrefAntonio AlbieroNo ratings yet
- Robotic Explosive Charging in Mining and Construction ApplicationsDocument6 pagesRobotic Explosive Charging in Mining and Construction ApplicationsCeti SacNo ratings yet
- Adaptive Output-Feedback Image-Based Visual Servoing For Quadrotor Unmanned Aerial VehiclesDocument8 pagesAdaptive Output-Feedback Image-Based Visual Servoing For Quadrotor Unmanned Aerial VehiclesAdeeba AliNo ratings yet
- 2 1 2D Visual ServoingDocument13 pages2 1 2D Visual ServoingPedro Alfonso Patlán RosalesNo ratings yet
- Vision-Based UAV Collision Avoidance With 2D Dynamic Safety EnvelopeDocument11 pagesVision-Based UAV Collision Avoidance With 2D Dynamic Safety EnvelopeBT21EE013 PratimaNo ratings yet
- Accurate Modeling and Robust Hovering Control For A Quad-Rotor VTOL AircraftDocument19 pagesAccurate Modeling and Robust Hovering Control For A Quad-Rotor VTOL AircraftIkeaMonsterNo ratings yet
- 2023 Sivos+HCR VSDocument148 pages2023 Sivos+HCR VSNabil BounouNo ratings yet
- Robotics Vision Lecture1Document258 pagesRobotics Vision Lecture1Nayan GuptaNo ratings yet
- Robotvision 161023045752Document36 pagesRobotvision 161023045752leoNo ratings yet
- ChatGPT RoboticsDocument25 pagesChatGPT Roboticsmo safariNo ratings yet
- Visual Servoing For A Quadcopter Flight ControlDocument99 pagesVisual Servoing For A Quadcopter Flight ControlCraneo LocoNo ratings yet