You might also like
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- SH Dream Team - PDDocument6 pagesSH Dream Team - PDSimran SinghNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- B.tech Project Stage-II Presentation - MidsemDocument25 pagesB.tech Project Stage-II Presentation - Midsemkaalin bhaiyaNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5795)
- Data 6005ADocument1 pageData 6005AErick De La RoSaNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- MODULE-11 Human Person As Oriented Towards Their Impending DeathDocument18 pagesMODULE-11 Human Person As Oriented Towards Their Impending DeathRoyceNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Data Lakes White Paper PDFDocument16 pagesData Lakes White Paper PDFRKNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Review of The Rebound Hammer Method-1Document26 pagesReview of The Rebound Hammer Method-1Mr. Jitender KumarNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Lab 2 - SPDT Switches and Logic SourcesDocument9 pagesLab 2 - SPDT Switches and Logic Sourcestasneem haririNo ratings yet
- Tabaq With Tang Band 4Document4 pagesTabaq With Tang Band 4Lmute MedioliNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Flutter WidgetsDocument43 pagesFlutter WidgetsSangakkara WarriorsNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Ms. Merrick's CSEC Geography Crash Course Booklet-1Document30 pagesMs. Merrick's CSEC Geography Crash Course Booklet-1shalini100% (4)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- 6553 Unit No 1 EmaadDocument26 pages6553 Unit No 1 Emaaduzma gulNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Week 3 - Graph of A FunctionDocument6 pagesWeek 3 - Graph of A FunctionDevon JayNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Final Year Project ProposalDocument6 pagesFinal Year Project ProposalHarisSafiNo ratings yet
- Guided Tuning ManualDocument3 pagesGuided Tuning Manualspectrum777No ratings yet
- 20.29 147192 (CM9383)Document10 pages20.29 147192 (CM9383)marcelo sampaioNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- ENaresh BossBabu GRahul 33Document6 pagesENaresh BossBabu GRahul 33anthonyNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Filipino FGD NarrativeDocument3 pagesFilipino FGD NarrativeNIMFA SEPARANo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- 839-4816 (Office) or (770) 301-8648 (Cell) : Corporate Finance: A Focused Approach, by Michael C. Ehrhardt / Eugene FDocument1 page839-4816 (Office) or (770) 301-8648 (Cell) : Corporate Finance: A Focused Approach, by Michael C. Ehrhardt / Eugene FlilbouyinNo ratings yet
- Aravindhan PT CV CSWIP TrainerDocument4 pagesAravindhan PT CV CSWIP TrainerGanesan RamamoorthyNo ratings yet
- Layout Proposal CSD 17 5613Document1 pageLayout Proposal CSD 17 5613Cesar Garay RangelNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Workbook Páginas 50 y 51Document2 pagesWorkbook Páginas 50 y 51Francisco López CabreraNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- PRML 2022 EndsemDocument3 pagesPRML 2022 EndsembhjkNo ratings yet
- Be11 enDocument12 pagesBe11 enSaqlain Mir100% (1)
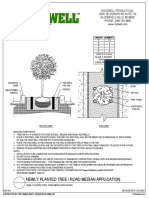
- Newly Planted Tree / Road Median ApplicationDocument1 pageNewly Planted Tree / Road Median ApplicationmooolkaNo ratings yet
- Evaluation of Chick Quality Which Method Do You Choose - 4Document4 pagesEvaluation of Chick Quality Which Method Do You Choose - 4Dani GarnidaNo ratings yet
- Chung Hwa Middle School, BSB Science Chapter 8 Worksheet: MagnetismDocument4 pagesChung Hwa Middle School, BSB Science Chapter 8 Worksheet: MagnetismSherlly HingNo ratings yet
- Tests For Surface Wellheads and BOP Equipment Used in Operations On Land and Above Water LevelDocument6 pagesTests For Surface Wellheads and BOP Equipment Used in Operations On Land and Above Water Levelahmed121No ratings yet
- Yolo v4Document42 pagesYolo v4Deepak SaxenaNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Exploration and Implementation of Commonality ValuDocument19 pagesExploration and Implementation of Commonality ValuJoaocatalo cataloNo ratings yet
- PL010 PUPI Technical Information REV01.2016 PDFDocument16 pagesPL010 PUPI Technical Information REV01.2016 PDFAhmed TahaNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)