You might also like
- Mazak Integrex ATC Alignment ProcedureDocument29 pagesMazak Integrex ATC Alignment Procedureganesan 0011100% (1)
- 12 - System Pomiarowy 1 - ACM-MCMSC-A0E - L14752B01Document79 pages12 - System Pomiarowy 1 - ACM-MCMSC-A0E - L14752B01Leadec LumelNo ratings yet
- Management Accounting by Cabrera Solution Manual 2011 PDFDocument3 pagesManagement Accounting by Cabrera Solution Manual 2011 PDFClaudette Clemente100% (1)
- Heidenhain M128 Measure: If You Don't Want Take Out 600 500 Table Please Follow Below ProceduralDocument4 pagesHeidenhain M128 Measure: If You Don't Want Take Out 600 500 Table Please Follow Below ProceduralchoNo ratings yet
- mars2ChiTu Mainboard SpecificationV3.0.920200612 - English - GcodeDocument5 pagesmars2ChiTu Mainboard SpecificationV3.0.920200612 - English - GcoderebeltazNo ratings yet
- Oundation: SeriesDocument16 pagesOundation: SeriesRosa PonceNo ratings yet
- 3D Laser ScannerDocument17 pages3D Laser ScannerSimone HolmanNo ratings yet
- Mitutoyo Crysta Apex SDocument12 pagesMitutoyo Crysta Apex Sjeremy pohNo ratings yet
- Fagor Dro NVP-M: Installation ManualDocument70 pagesFagor Dro NVP-M: Installation Manualpmc_pmcNo ratings yet
- Analog Design Lab ReportDocument13 pagesAnalog Design Lab Reportapi-260130384No ratings yet
- Postability Post Processor DocumentationDocument15 pagesPostability Post Processor DocumentationMustapha BenabedNo ratings yet
- ZX Series (ZX-L-N) : Ordering InformationDocument29 pagesZX Series (ZX-L-N) : Ordering Informationkavin22No ratings yet
- Ins Project ReportDocument14 pagesIns Project ReportTalha SaleemNo ratings yet
- Radar Arduino ProjectDocument17 pagesRadar Arduino ProjectDARSHAN KUDACHENo ratings yet
- AN00122-003 - Rotary Axis Flying ShearDocument6 pagesAN00122-003 - Rotary Axis Flying ShearamirixmNo ratings yet
- MLX90316SDC MelexisDocument10 pagesMLX90316SDC MelexisWalter Taipe QuispeNo ratings yet
- Black Line Pro Program 020808Document24 pagesBlack Line Pro Program 020808Drshahril Zulkarnain100% (1)
- Name: Aditya Branch: Ee ROLL NO.: 2004201Document7 pagesName: Aditya Branch: Ee ROLL NO.: 2004201Aditya SinghaniaNo ratings yet
- U300 Marking Laser Galvo TrotecDocument8 pagesU300 Marking Laser Galvo TrotecIvan Ezequiel CastilloNo ratings yet
- TOPCNC TC55V Instruction Manual: TOPCNC Automation Technology Co., Ltd. Felicia JiaDocument13 pagesTOPCNC TC55V Instruction Manual: TOPCNC Automation Technology Co., Ltd. Felicia Jiaanhthong3kNo ratings yet
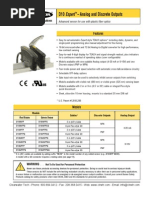
- Banner D10 Analog Discrete OutputsDocument15 pagesBanner D10 Analog Discrete OutputsMemik TylnNo ratings yet
- Svi Vernier UncertaintyDocument54 pagesSvi Vernier UncertaintyCitco IdfcNo ratings yet
- New TOPCNC TC55V Instruction ManualDocument14 pagesNew TOPCNC TC55V Instruction ManualCarlos SerranoNo ratings yet
- AMO Absolute Encoder CatalogDocument36 pagesAMO Absolute Encoder CatalogElectromateNo ratings yet
- dt0076 Compensating For Accelerometer Installation Error Zeroing Pitch and Roll For A Reference Orientation StmicroelectronicsDocument6 pagesdt0076 Compensating For Accelerometer Installation Error Zeroing Pitch and Roll For A Reference Orientation StmicroelectronicsPatrickNo ratings yet
- E4pa NDocument8 pagesE4pa NSaturnhauiNo ratings yet
- Amada VIPROS Programming ManualDocument94 pagesAmada VIPROS Programming Manualเกมส์ จารุกิตติ์No ratings yet
- Practical 6Document7 pagesPractical 6Ayushi SavaniNo ratings yet
- Chap 1 - EDMDocument20 pagesChap 1 - EDMAmyrul HaqiemNo ratings yet
- Sokkia 3110Document4 pagesSokkia 3110bydnm100% (1)
- Ah100b SpecificationDocument10 pagesAh100b SpecificationEdo KesumaNo ratings yet
- Manual Mar FederalDocument21 pagesManual Mar FederalAlan CedilloNo ratings yet
- GP1A30R: OPIC Photointerrupter With Encoder FunctionDocument4 pagesGP1A30R: OPIC Photointerrupter With Encoder FunctionnospherathusNo ratings yet
- Lec # 12.3 Problem Solving CNC Part Programing (Week#12)Document9 pagesLec # 12.3 Problem Solving CNC Part Programing (Week#12)SAIF KHANNo ratings yet
- LCS Assigment 2Document9 pagesLCS Assigment 2Maryam anjumNo ratings yet
- CJ2 - Basic Prog - PPT (Compatibility Mode)Document85 pagesCJ2 - Basic Prog - PPT (Compatibility Mode)Choirull HidayatNo ratings yet
- Angle Random Walk App NoteDocument4 pagesAngle Random Walk App NoteSherif EltoukhiNo ratings yet
- Automatic Railway GateDocument11 pagesAutomatic Railway GateSrijan AgrawalNo ratings yet
- Project Report On Automatic Railway GateDocument11 pagesProject Report On Automatic Railway Gatemohitsaha61974No ratings yet
- TOPCNC TC55V Instruction ManualDocument13 pagesTOPCNC TC55V Instruction Manualanhthong3kNo ratings yet
- Quid 2005Document85 pagesQuid 2005mayan73No ratings yet
- 3 Power LED Dimmer Using ATmega32 MicrocontrollerDocument5 pages3 Power LED Dimmer Using ATmega32 MicrocontrollerAmiruddinNo ratings yet
- Precise Measurement FaqsDocument9 pagesPrecise Measurement FaqsOmar SaadiqNo ratings yet
- Im-50 Series: Intelligent Measurement Total StationDocument4 pagesIm-50 Series: Intelligent Measurement Total StationAbdirizak HusseinNo ratings yet
- My Arduino Line Following Robot !!! - With Pololu QTR-6A IR Reflectance Sensor ArrayDocument4 pagesMy Arduino Line Following Robot !!! - With Pololu QTR-6A IR Reflectance Sensor ArraySadiq AhmadNo ratings yet
- Install Data 0Document3 pagesInstall Data 0Jaturong SiritrakunNo ratings yet
- G Series GP GH Analog DPulseDocument18 pagesG Series GP GH Analog DPulseVayu Laxman BNo ratings yet
- Basic Parameter Setting Needs To Be Done To Run Two Servo and One Spindle - For 0i-FDocument6 pagesBasic Parameter Setting Needs To Be Done To Run Two Servo and One Spindle - For 0i-FAdvance CNC TechnologiesNo ratings yet
- E3m VG16Document17 pagesE3m VG16sopas81No ratings yet
- MPU-A Series Hall Effect Geartooth Sensor Pick-Up: FeaturesDocument2 pagesMPU-A Series Hall Effect Geartooth Sensor Pick-Up: FeaturesmcarrillogNo ratings yet
- 3 Waukesha Gas Engine Maintenance ManualDocument75 pages3 Waukesha Gas Engine Maintenance ManualMamunNo ratings yet
- Mitutoyo CMMDocument26 pagesMitutoyo CMMSniderNo ratings yet
- UDB100 XDocument2 pagesUDB100 Xcork_ie5637No ratings yet
- Manufacturing Automation: Computer Numerical Control (CNC)Document64 pagesManufacturing Automation: Computer Numerical Control (CNC)Mohamed Zied ChaariNo ratings yet
- Sample CNCDocument5 pagesSample CNCMuhammed A. MahdiNo ratings yet
- MicroESystems Mercury3000VSi DataSheetDocument10 pagesMicroESystems Mercury3000VSi DataSheetElectromateNo ratings yet
- TS27R - BlumDocument14 pagesTS27R - BlumtranhoachbnNo ratings yet
- Acoustic Glass - ENDocument2 pagesAcoustic Glass - ENpeterandreaNo ratings yet
- Government Hazi Muhammad Mohsin College Chattogram: Admission FormDocument1 pageGovernment Hazi Muhammad Mohsin College Chattogram: Admission FormThe Helper SoulNo ratings yet
- Atomberg Gorilla FanDocument12 pagesAtomberg Gorilla FanjothamNo ratings yet
- بتول ماجد سعيد (تقرير السيطرة على تلوث الهواء)Document5 pagesبتول ماجد سعيد (تقرير السيطرة على تلوث الهواء)Batool MagedNo ratings yet
- 2.a.1.f v2 Active Matrix (AM) DTMC (Display Technology Milestone Chart)Document1 page2.a.1.f v2 Active Matrix (AM) DTMC (Display Technology Milestone Chart)matwan29No ratings yet
- Etag 002 PT 2 PDFDocument13 pagesEtag 002 PT 2 PDFRui RibeiroNo ratings yet
- .CLP Delta - DVP-ES2 - EX2 - SS2 - SA2 - SX2 - SE&TP-Program - O - EN - 20130222 EDITADODocument782 pages.CLP Delta - DVP-ES2 - EX2 - SS2 - SA2 - SX2 - SE&TP-Program - O - EN - 20130222 EDITADOMarcelo JesusNo ratings yet
- HRM Practices in NepalDocument22 pagesHRM Practices in NepalBodhiNo ratings yet
- Rsi r2 Super Rsi FaqDocument14 pagesRsi r2 Super Rsi FaqChandrasekar Chandramohan100% (1)
- Sensitivity of Rapid Diagnostic Test and Microscopy in Malaria Diagnosis in Iva-Valley Suburb, EnuguDocument4 pagesSensitivity of Rapid Diagnostic Test and Microscopy in Malaria Diagnosis in Iva-Valley Suburb, EnuguSMA N 1 TOROHNo ratings yet
- Community Profile and Baseline DataDocument7 pagesCommunity Profile and Baseline DataEJ RaveloNo ratings yet
- Raiders of SuluDocument1 pageRaiders of SuluBlexx LagrimasNo ratings yet
- 2010 - Howaldt y Schwarz - Social Innovation-Concepts, Research Fields and International - LibroDocument82 pages2010 - Howaldt y Schwarz - Social Innovation-Concepts, Research Fields and International - Librovallejo13No ratings yet
- Pitch DeckDocument21 pagesPitch DeckIANo ratings yet
- Unit 1 PrinciplesDocument17 pagesUnit 1 PrinciplesRohit YadavNo ratings yet
- Mahindra&mahindraDocument95 pagesMahindra&mahindraAshik R GowdaNo ratings yet
- Homework 9Document1 pageHomework 9Nat Dabuét0% (1)
- How Transformers WorkDocument15 pagesHow Transformers Worktim schroderNo ratings yet
- Audi A4-7Document532 pagesAudi A4-7Anonymous QRVqOsa5No ratings yet
- How To Install Metal LathDocument2 pagesHow To Install Metal LathKfir BenishtiNo ratings yet
- Vetoset CA541: Thickbed Cementitious Tile AdhesiveDocument2 pagesVetoset CA541: Thickbed Cementitious Tile Adhesivemus3b1985No ratings yet
- Abilash - Subramanian CV - 003 PDFDocument4 pagesAbilash - Subramanian CV - 003 PDFAbilash SubramanianNo ratings yet
- JO 20221109 NationalDocument244 pagesJO 20221109 NationalMark Leo BejeminoNo ratings yet
- Đề Tuyển Sinh Lớp 10 Môn Tiếng AnhDocument11 pagesĐề Tuyển Sinh Lớp 10 Môn Tiếng AnhTrangNo ratings yet
- (EN 10348) - Steel For The Reinforcement of Concrete. Galvanized Reinforcing SteelDocument24 pages(EN 10348) - Steel For The Reinforcement of Concrete. Galvanized Reinforcing Steelbagusu_6No ratings yet
- Dec 2-7 Week 4 Physics DLLDocument3 pagesDec 2-7 Week 4 Physics DLLRicardo Acosta Subad100% (1)
- Aashto M288-17 Product Selection GuideDocument1 pageAashto M288-17 Product Selection GuideDem DemNo ratings yet
- A202 KBK3043 - Assignment Individual (20%) Review LiteratureDocument5 pagesA202 KBK3043 - Assignment Individual (20%) Review LiteratureAlfie AliNo ratings yet