You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5811)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (844)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Mechanics - Tufree Force and AccDocument10 pagesMechanics - Tufree Force and AccEuw Chaiwanont100% (2)
- 1st Periodical ExamDocument4 pages1st Periodical ExamAaron RomuarNo ratings yet
- Transalkylation of Toluene PDFDocument2 pagesTransalkylation of Toluene PDFAA0809No ratings yet
- 4 FLD DatasheetDocument4 pages4 FLD Datasheetinfinity1200No ratings yet
- Solving Systems of Equations Using MATLABDocument12 pagesSolving Systems of Equations Using MATLABkNo ratings yet
- Test Bank For Business Statistics 3rd Canadian Edition Norean R Sharpe Norean D Sharpe Richard D de Veaux Paul F Velleman David WrightDocument33 pagesTest Bank For Business Statistics 3rd Canadian Edition Norean R Sharpe Norean D Sharpe Richard D de Veaux Paul F Velleman David Wrightsareeglyphicezkj100% (44)
- Understanding Semiconductors 1St Edition Corey Richard All ChapterDocument67 pagesUnderstanding Semiconductors 1St Edition Corey Richard All Chapterjoanne.net646100% (7)
- State of The Art AI EdcationDocument29 pagesState of The Art AI EdcationOmar NasrNo ratings yet
- Digestion and Absorbtion of ProteinsDocument14 pagesDigestion and Absorbtion of Proteinsnandini pulavartiNo ratings yet
- Diana Cernetchi 11C PascalDocument3 pagesDiana Cernetchi 11C PascalSandraNo ratings yet
- Abap-Level I Syllabus For SAP-ABAP Module Ver ECC 6.0Document9 pagesAbap-Level I Syllabus For SAP-ABAP Module Ver ECC 6.0Azeez99No ratings yet
- PL215 Operating Instructions SN Up To 222xxxDocument32 pagesPL215 Operating Instructions SN Up To 222xxxLODELBARRIO RDNo ratings yet
- Sistem Resultan GayaDocument12 pagesSistem Resultan GayadimasNo ratings yet
- Effect of NB Additive On Wear Resistance and Tensile Properties of TheDocument25 pagesEffect of NB Additive On Wear Resistance and Tensile Properties of TheVedaant ShahNo ratings yet
- Maths School Map Lesson PlanDocument2 pagesMaths School Map Lesson Planapi-316644222No ratings yet
- Presented By-Dr - Siddhartha Ghelani P.G Teacher-Dr - Hemina DesaiDocument61 pagesPresented By-Dr - Siddhartha Ghelani P.G Teacher-Dr - Hemina DesaiSiddhartha GhelaniNo ratings yet
- Hermetic Single StageDocument16 pagesHermetic Single StagegnoquiNo ratings yet
- Brake SBDocument29 pagesBrake SBMohamed ElnagdyNo ratings yet
- Self Centering Four Jaw ChuckDocument6 pagesSelf Centering Four Jaw ChuckbalakaleesNo ratings yet
- Wet PreservationDocument6 pagesWet PreservationShambhu MehtaNo ratings yet
- MCQ Question On ExcelDocument13 pagesMCQ Question On ExcelGabbyNo ratings yet
- LKS User Manual of Management System LKS-TM001 Series - V2.0Document41 pagesLKS User Manual of Management System LKS-TM001 Series - V2.0SamuelJrManatadNo ratings yet
- Separation of HCl-H2SO4 by MDDocument7 pagesSeparation of HCl-H2SO4 by MDKuldeep BhattNo ratings yet
- Fibonacci Retracement Part 1Document76 pagesFibonacci Retracement Part 1Jayabharathi Yoganath0% (1)
- Effect of Silica Fume On The Properties of Concrete: (Ijerat)Document5 pagesEffect of Silica Fume On The Properties of Concrete: (Ijerat)Ohnmar OmNo ratings yet
- Surveying Module by A.A ShumbaDocument36 pagesSurveying Module by A.A ShumbaTatenda PaduzeNo ratings yet
- New Microprocessor Theory Course OutlineDocument6 pagesNew Microprocessor Theory Course OutlineusmanzahidNo ratings yet
- Biology 101 Lab Exam Ii Study GuideDocument9 pagesBiology 101 Lab Exam Ii Study GuideAllison100% (1)
- Math - LO-2018Document34 pagesMath - LO-2018Omar Ayman Mahmoud EssaNo ratings yet
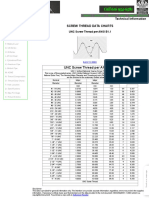
- Thread Data Charts-UNC Screw Thread Per ANSI B1.1Document2 pagesThread Data Charts-UNC Screw Thread Per ANSI B1.1MMFAWZYNo ratings yet