You might also like
- N4 Industrial ElectronicsDocument97 pagesN4 Industrial ElectronicsTinotenda MudamboNo ratings yet
- EEE 101 - Lect23Document12 pagesEEE 101 - Lect23Basim AlthafNo ratings yet
- Lab Report Solayman Ewu - CompressDocument12 pagesLab Report Solayman Ewu - CompressVic100% (1)
- Magnetic Circuits: EE 340 Y. BaghzouzDocument36 pagesMagnetic Circuits: EE 340 Y. BaghzouzEymen EruyarNo ratings yet
- Industrial Electronics n4 2018 CombinedDocument247 pagesIndustrial Electronics n4 2018 Combinedmandisamsimango85No ratings yet
- DC Machine (Pharos) PDFDocument124 pagesDC Machine (Pharos) PDFShailendra Singh KustwarNo ratings yet
- N4 Industrial Electronics April 2016Document9 pagesN4 Industrial Electronics April 2016advice nethengweNo ratings yet
- Magnetization Curve of DC Generator - Electrical4uDocument5 pagesMagnetization Curve of DC Generator - Electrical4uM Kumar MarimuthuNo ratings yet
- Asynchronous and Synchronous Machines (EL-208) (IV SEM EL Session 2017-18) Tutorial Sheet 1 (Dated 08.01.2018) (3 Phase Induction MotorsDocument10 pagesAsynchronous and Synchronous Machines (EL-208) (IV SEM EL Session 2017-18) Tutorial Sheet 1 (Dated 08.01.2018) (3 Phase Induction MotorsKushagra BhatiaNo ratings yet
- LTspice LectureDocument30 pagesLTspice LectureA Mohan BabuNo ratings yet
- 360 Topic 6 DC MachineDocument33 pages360 Topic 6 DC MachineAchsan ArfandiNo ratings yet
- Electromagnetic Relay Static Relay Numerical Relay: Single Input Comparator Dual Input Comparator Multi Input ComparatorDocument34 pagesElectromagnetic Relay Static Relay Numerical Relay: Single Input Comparator Dual Input Comparator Multi Input ComparatorSathiyarajNo ratings yet
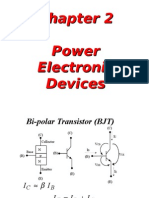
- Chapter2 DevicesDocument33 pagesChapter2 DevicesFrozenTuxNo ratings yet
- Speed Control of DC MotorDocument4 pagesSpeed Control of DC MotorjitbakNo ratings yet
- DC MachinesDocument126 pagesDC MachinesAfaf EmadNo ratings yet
- Load Flow Matrices IIT Roorkee Notes NPTELDocument88 pagesLoad Flow Matrices IIT Roorkee Notes NPTELconsultrail100% (1)
- Chapter 4 - Dynamic AnalysisDocument16 pagesChapter 4 - Dynamic AnalysisDimple Sharma100% (1)
- Ch.1 DC CircuitsDocument40 pagesCh.1 DC Circuitsaattish100% (1)
- Capacitor Charge and Discharge MathematicsDocument3 pagesCapacitor Charge and Discharge MathematicsRahul SharmaNo ratings yet
- EMMI Lab PDFDocument31 pagesEMMI Lab PDFSarithareddy AvuluriNo ratings yet
- Load Test of Single Phase TransformerDocument6 pagesLoad Test of Single Phase TransformerKevin DanyNo ratings yet
- Experiment.3. Load Characteristics of D.C Shunt GeneratorDocument2 pagesExperiment.3. Load Characteristics of D.C Shunt Generatorمحمد الحدي100% (1)
- Sheet 2-Circuit Magnetic PDFDocument14 pagesSheet 2-Circuit Magnetic PDFMarcos Silva MonteloNo ratings yet
- Solution:: Fig. 2 Shows The Required Common Base ConnectionDocument9 pagesSolution:: Fig. 2 Shows The Required Common Base ConnectionSwathi Gudivada100% (1)
- Experiment 4 - Three Phase Uncontrolled RectifierDocument13 pagesExperiment 4 - Three Phase Uncontrolled RectifierAaaa DdddNo ratings yet
- Lesson Plan For BEEEDocument18 pagesLesson Plan For BEEEdineshanand810100% (1)
- AC CircuitsDocument20 pagesAC CircuitsNikhil GobhilNo ratings yet
- EEE 2019 Lecture 4Document30 pagesEEE 2019 Lecture 4Emment ChromaNo ratings yet
- Injection of EMF in The Rotor CircuitDocument3 pagesInjection of EMF in The Rotor CircuitAbhishekGuptaNo ratings yet
- Electrical Circuit Lab ManualDocument38 pagesElectrical Circuit Lab Manualecessec67% (3)
- Industrial Electronics 1st ExamDocument34 pagesIndustrial Electronics 1st ExamJomar Bonje100% (1)
- EE6401 NotesDocument118 pagesEE6401 Notesjagadeesh100% (1)
- EEE3 Lecture 5 - Exam2 - Sinusoidal Steady-State AnalysisDocument36 pagesEEE3 Lecture 5 - Exam2 - Sinusoidal Steady-State AnalysisAnfy CeninaNo ratings yet
- Transformer NotesDocument2 pagesTransformer NotesSuditya Mandal100% (1)
- The Copperbelt University School of Mathematics and Natural Sciences Department of Physics PH 110 Introductory PhysicsDocument3 pagesThe Copperbelt University School of Mathematics and Natural Sciences Department of Physics PH 110 Introductory PhysicsLazy BanditNo ratings yet
- Indutors and Capacitors in Series and ParallelDocument10 pagesIndutors and Capacitors in Series and ParallelReddyvari VenugopalNo ratings yet
- Exp1 The Single Phase TransformerDocument8 pagesExp1 The Single Phase Transformernaveen rajNo ratings yet
- Speed Control of DC Motor by Various MethodsDocument5 pagesSpeed Control of DC Motor by Various MethodsVIVA-TECH IJRINo ratings yet
- Electrical Measuring Devices and MeasurementDocument62 pagesElectrical Measuring Devices and MeasurementDanelNo ratings yet
- Power Electronics: Unit-4 InverterDocument31 pagesPower Electronics: Unit-4 Invertershikha prakashNo ratings yet
- T790 - Industrial Electronics N5 QP Apr 2019Document11 pagesT790 - Industrial Electronics N5 QP Apr 2019Kelsey BothaNo ratings yet
- Question Bank Ac MachinesDocument4 pagesQuestion Bank Ac Machinesashwin paulNo ratings yet
- Lecture 3-Photovoltaic MaterialDocument57 pagesLecture 3-Photovoltaic MaterialButchNo ratings yet
- Electrical Load EstimationDocument8 pagesElectrical Load EstimationWidhi ImranovichNo ratings yet
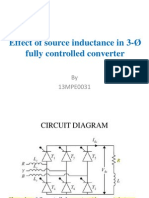
- Effect of Source Inductance in 3Ø Full WaveDocument12 pagesEffect of Source Inductance in 3Ø Full WaveUmashankar Subramaniam100% (1)
- Observation of Polarity Test of A Single Phase TransformerDocument3 pagesObservation of Polarity Test of A Single Phase TransformerAbdul Mubin100% (2)
- Electrical EnggDocument17 pagesElectrical Enggtkseneee0% (1)
- EL 404 Circuit & Field TheoryDocument57 pagesEL 404 Circuit & Field Theorykaruppusamymari100% (1)
- Chapter 5: Speed-Torque Characteristics of Electric MotorsDocument46 pagesChapter 5: Speed-Torque Characteristics of Electric MotorsFrozenTuxNo ratings yet
- Circuit Theory - Lecture Notes, Study Material and Important Questions, AnswersDocument5 pagesCircuit Theory - Lecture Notes, Study Material and Important Questions, AnswersM.V. TVNo ratings yet
- A Collection of Problems on Mathematical Physics: International Series of Monographs in Pure and Applied MathematicsFrom EverandA Collection of Problems on Mathematical Physics: International Series of Monographs in Pure and Applied MathematicsNo ratings yet
- Advanced Electric Machine Theory - (Web)Document9 pagesAdvanced Electric Machine Theory - (Web)deepanshu rajputNo ratings yet
- ELEG 421 Chapter 03Document17 pagesELEG 421 Chapter 03Saied Aly SalamahNo ratings yet
- DC Motor Modeling Using MATLABDocument10 pagesDC Motor Modeling Using MATLABmuhmad almtrabieNo ratings yet
- Wave Analysis of LineDocument31 pagesWave Analysis of LineSYAHRINA MEILANI hoamNo ratings yet
- Matlab Imp FilesDocument44 pagesMatlab Imp FilesMadhav SharmaNo ratings yet