You might also like
- Signals Spectra and DSPDocument13 pagesSignals Spectra and DSPLegenGary100% (1)
- ECET422a - Lecture 2 Part 2 - Quantization and EncodingDocument23 pagesECET422a - Lecture 2 Part 2 - Quantization and EncodingJoe MilsapNo ratings yet
- 20150416114355dsp Midterm 2013Document2 pages20150416114355dsp Midterm 2013Ginanjar SuwasonoNo ratings yet
- Matlab SignalDocument48 pagesMatlab SignalPanagiotis Giannoulis50% (2)
- Lab Sheet 1: Analog To Digital Conversion (ADC) and Digital To Analog Conversion (DAC) FundamentalsDocument13 pagesLab Sheet 1: Analog To Digital Conversion (ADC) and Digital To Analog Conversion (DAC) FundamentalsMasud SarkerNo ratings yet
- 10 - Pulse Amplitude Modulation (PAM) PDFDocument56 pages10 - Pulse Amplitude Modulation (PAM) PDFPankaj KumarNo ratings yet
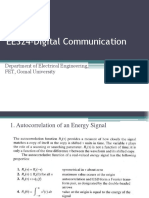
- EE324-Digital Communication: Department of Electrical Engineering, FET, Gomal UniversityDocument18 pagesEE324-Digital Communication: Department of Electrical Engineering, FET, Gomal UniversityUMAIR LEONo ratings yet
- The Integration Algorithm: DX DX DX X X X F IDocument30 pagesThe Integration Algorithm: DX DX DX X X X F IsuhasnambiarNo ratings yet
- Digital Communications I: Modulation and Coding Course: Term 3 - 2008 Catharina LogothetisDocument22 pagesDigital Communications I: Modulation and Coding Course: Term 3 - 2008 Catharina LogothetiserichaasNo ratings yet
- Digital Signal Processing-Random ProcessesDocument121 pagesDigital Signal Processing-Random ProcessesGramoz Cubreli100% (1)
- Analysis of AlgorithmsDocument30 pagesAnalysis of AlgorithmsRohit ChaudharyNo ratings yet
- Section 9 Digitizing A Signal: F (T), The Calculated or Sampled Continuous-Time SignalDocument4 pagesSection 9 Digitizing A Signal: F (T), The Calculated or Sampled Continuous-Time Signalalberto floresNo ratings yet
- Marcelo Lucena de Souza Análise de Voz e Vídeo: mls2@Document38 pagesMarcelo Lucena de Souza Análise de Voz e Vídeo: mls2@Rafael FerreiraNo ratings yet
- C1 - Sampling and Quantization - 2Document23 pagesC1 - Sampling and Quantization - 2HuzaifiNo ratings yet
- EECE 522 Notes - 08 CH - 3 CRLB Examples in BookDocument19 pagesEECE 522 Notes - 08 CH - 3 CRLB Examples in Bookkarim2005No ratings yet
- Quadrature Amplitude Modulation (QAM) TransmitterDocument16 pagesQuadrature Amplitude Modulation (QAM) TransmitterdavidcenNo ratings yet
- Signal Modeling: BY Debangi GoswamiDocument36 pagesSignal Modeling: BY Debangi GoswamiDebangi GoswamiNo ratings yet
- Problemas Parte I Comunicaciones DigitalesDocument17 pagesProblemas Parte I Comunicaciones DigitalesNano GomeshNo ratings yet
- 11 Binomial DistributionDocument21 pages11 Binomial DistributionD-497 Neha MalviyaNo ratings yet
- Cycle 1 DclabDocument30 pagesCycle 1 Dclabmd salmanNo ratings yet
- Use of Kalman Filters in Time and Frequency AnalysisDocument78 pagesUse of Kalman Filters in Time and Frequency AnalysisJaya ShuklaNo ratings yet
- Tracking A Sine Wave: Fundamentals of Kalman Filtering: A Practical ApproachDocument83 pagesTracking A Sine Wave: Fundamentals of Kalman Filtering: A Practical ApproachKhalil UllahNo ratings yet
- DSP Lab ManualDocument75 pagesDSP Lab ManualRyan951No ratings yet
- Vlsies Lab Assignment I Sem DSP - Cdac-2Document67 pagesVlsies Lab Assignment I Sem DSP - Cdac-2Jay KothariNo ratings yet
- Emcs - 607P 11-07-2014Document68 pagesEmcs - 607P 11-07-2014abdulbari.abNo ratings yet
- Mathcad - Butter Worth PLCDocument4 pagesMathcad - Butter Worth PLCRicardo AtaídeNo ratings yet
- DSP Lab RecordDocument97 pagesDSP Lab RecordLikhita UttamNo ratings yet
- M.E CS-1 Lab ManualDocument78 pagesM.E CS-1 Lab Manualselvaece2010No ratings yet
- Golay CodesDocument50 pagesGolay CodesdshgjklopNo ratings yet
- Receiver Filter: Baseband Output Is A Superposition of Filtered Pulses Plus Filtered NoiseDocument4 pagesReceiver Filter: Baseband Output Is A Superposition of Filtered Pulses Plus Filtered NoiseBiswajit SinghNo ratings yet
- Dynamic Characteristics: Input Signal X (T) Output Signal y (T)Document29 pagesDynamic Characteristics: Input Signal X (T) Output Signal y (T)veenadivyakishNo ratings yet
- ReviewCh6 Random ProcessesDocument28 pagesReviewCh6 Random ProcessesBomezzZ EnterprisesNo ratings yet
- Tutorial SAM6Document4 pagesTutorial SAM6Ditta Ria AriniNo ratings yet
- 1 Basics DSP AV IntroDocument36 pages1 Basics DSP AV IntroUbaid UmarNo ratings yet
- C4 Isi 2013 PDFDocument32 pagesC4 Isi 2013 PDFAnh Bien NguyenNo ratings yet
- Case Study - Kalman Filter Design and SimulationDocument10 pagesCase Study - Kalman Filter Design and Simulationrktiwary256034No ratings yet
- EE 4343/5329 - Control System Design Project: EE 4343/5329 Homepage EE 4343/5329 Course OutlineDocument14 pagesEE 4343/5329 - Control System Design Project: EE 4343/5329 Homepage EE 4343/5329 Course OutlineAkmaral NauryzgalievaNo ratings yet
- DM Adm OkDocument32 pagesDM Adm Okp17421183048 ANA MAWARNI MUSTIKAWATINo ratings yet
- Advance Communication System Lectures Part 4Document32 pagesAdvance Communication System Lectures Part 4Shahzad Khalid ChNo ratings yet
- Signal Representation and Time Domain AnalysisDocument30 pagesSignal Representation and Time Domain AnalysisAbdul HadiNo ratings yet
- Dynamic Charactorstics of An InstrumentsDocument30 pagesDynamic Charactorstics of An InstrumentsDhinakaran VeemanNo ratings yet
- PCM Tta BatchDocument84 pagesPCM Tta BatchGourav RoyNo ratings yet
- DSP Lab With Theory III Year ECE B SectionDocument12 pagesDSP Lab With Theory III Year ECE B SectionLokam AvanthikaNo ratings yet
- Waveform Coding Techniques: Chapter-3Document33 pagesWaveform Coding Techniques: Chapter-3Ranbir FrostbornNo ratings yet
- Lecture 2Document22 pagesLecture 2Amir KhanNo ratings yet
- Fundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsFrom EverandFundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsNo ratings yet
- Analytical Modeling of Solute Transport in Groundwater: Using Models to Understand the Effect of Natural Processes on Contaminant Fate and TransportFrom EverandAnalytical Modeling of Solute Transport in Groundwater: Using Models to Understand the Effect of Natural Processes on Contaminant Fate and TransportNo ratings yet
- Combinatorial Algorithms: For Computers and CalculatorsFrom EverandCombinatorial Algorithms: For Computers and CalculatorsRating: 4 out of 5 stars4/5 (2)
- Some Case Studies on Signal, Audio and Image Processing Using MatlabFrom EverandSome Case Studies on Signal, Audio and Image Processing Using MatlabNo ratings yet
- Numerical Methods for Simulation and Optimization of Piecewise Deterministic Markov Processes: Application to ReliabilityFrom EverandNumerical Methods for Simulation and Optimization of Piecewise Deterministic Markov Processes: Application to ReliabilityNo ratings yet
- Factorization of Boundary Value Problems Using the Invariant Embedding MethodFrom EverandFactorization of Boundary Value Problems Using the Invariant Embedding MethodNo ratings yet