You might also like
- Calibration of The Mipeg SystemDocument32 pagesCalibration of The Mipeg SystemJeneesh Shanmughan100% (2)
- Mipeg 2000 Installation GuideDocument17 pagesMipeg 2000 Installation GuideSatheesh VagiNo ratings yet
- zoomlion-truck-QY100 HDocument16 pageszoomlion-truck-QY100 Hالبديري بهاءNo ratings yet
- Pat Load Moment IndicatorDocument79 pagesPat Load Moment IndicatorWilson torresNo ratings yet
- I3000 RAYCOWYLIE Hyd RCI Cal PDFDocument59 pagesI3000 RAYCOWYLIE Hyd RCI Cal PDFraul80% (5)
- SLI ManualDocument142 pagesSLI ManualAnonymous 1ykzuaxWgY100% (1)
- NomenclatureDocument100 pagesNomenclaturejairsegura100% (4)
- XCMG QY50K Operation ManualDocument10 pagesXCMG QY50K Operation ManualElxan ShaheliyevNo ratings yet
- WTL-A700 LMI System Introduction For Crawler CraneDocument5 pagesWTL-A700 LMI System Introduction For Crawler Crane劉功暹No ratings yet
- Robway SLI ManualDocument135 pagesRobway SLI ManualBatagor H. Isan100% (1)
- I3000 Hyd RCI Cal PDFDocument59 pagesI3000 Hyd RCI Cal PDFLuis Arturo Arenales Mayta100% (1)
- Test Instructions Slewing Bearing Maximum Allowable Wear: Page 1 Von 3Document3 pagesTest Instructions Slewing Bearing Maximum Allowable Wear: Page 1 Von 3Ranil KanchanaNo ratings yet
- Crane SmartDocument60 pagesCrane SmartDatNo ratings yet
- W376 LMI ManualDocument33 pagesW376 LMI ManualAnonymous yjK3peI7100% (1)
- Pedestal Crane SpecDocument21 pagesPedestal Crane SpecYinka Akinkunmi100% (1)
- Mark 4E2 OperatorsDocument22 pagesMark 4E2 OperatorsRajan Mullappilly100% (2)
- Rt551 Lmi Greer 1Document40 pagesRt551 Lmi Greer 1George JhonsonNo ratings yet
- Rci-8510 A3 Graphical Cable-Based Display ManualDocument30 pagesRci-8510 A3 Graphical Cable-Based Display ManualMgc ElektronikNo ratings yet
- LMI Operators ManualDocument33 pagesLMI Operators ManualsobirinNo ratings yet
- Greer RCI510 Operators W450273ADocument33 pagesGreer RCI510 Operators W450273AAndres Florentin Pizarro LazarteNo ratings yet
- GROVE RT550E Operation ManualDocument530 pagesGROVE RT550E Operation Manualprashanth sreedharanNo ratings yet
- LSI LMI Calibration GuideDocument26 pagesLSI LMI Calibration GuideHussein BeqaiNo ratings yet
- Terex Rough Terrain Cranes Spec 77ad4a PDFDocument212 pagesTerex Rough Terrain Cranes Spec 77ad4a PDFGunawan WijayaNo ratings yet
- Crawler CraneDocument2 pagesCrawler CraneFarukBasyoriNo ratings yet
- Demag Ac 535 All Terrain CraneDocument20 pagesDemag Ac 535 All Terrain CranePamela Courson100% (1)
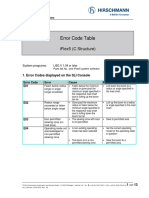
- 2-5 New Error Codes PDFDocument13 pages2-5 New Error Codes PDFdacem torres cruz100% (1)
- Load Chart GRT 880 - 236006-1Document18 pagesLoad Chart GRT 880 - 236006-1mohamedNo ratings yet
- Liebherr LTM1080-1 Load ChartDocument73 pagesLiebherr LTM1080-1 Load ChartBane Radovic100% (1)
- KATO NK 250 Ev PDFDocument3 pagesKATO NK 250 Ev PDFzam11050% (4)
- IFLEX2 ISCOUT Grove RT TM Service Manual English 1Document64 pagesIFLEX2 ISCOUT Grove RT TM Service Manual English 1Mohamed Rashed100% (1)
- PAT LMI System DS350GM Troubleshooting ManualDocument56 pagesPAT LMI System DS350GM Troubleshooting ManualCarlos E. Delius Sciaroni75% (4)
- CC2800 Hydraulic InteractivDocument31 pagesCC2800 Hydraulic InteractivDemian Leiva100% (2)
- Lmi OperationDocument24 pagesLmi OperationMohamed Rashed100% (2)
- Vessel Pedestal Crane Student ManualDocument19 pagesVessel Pedestal Crane Student Manualfafejaya1350% (2)
- Iflex5 XCMG Operators Manual English PDFDocument42 pagesIflex5 XCMG Operators Manual English PDFpurnomo100% (2)
- 21-Crane Inspection Check ListDocument2 pages21-Crane Inspection Check ListKhuda Buksh100% (1)
- FA150 Manrider Winch MHD56234 - Ed3Document69 pagesFA150 Manrider Winch MHD56234 - Ed3Riaz SpNo ratings yet
- Pat Iflex5Document83 pagesPat Iflex5aren_mendoza100% (3)
- 180 Ton LTM 1160-1 LiebherrDocument13 pages180 Ton LTM 1160-1 Liebherrcornel_lupuNo ratings yet
- Load Moment Indicator: iFLEX5Document44 pagesLoad Moment Indicator: iFLEX5Bhola BholaNo ratings yet
- Zcc800hcg Operating ManualDocument319 pagesZcc800hcg Operating Manualमुकेश कुमार झाNo ratings yet
- Product Advantages Mobile Crane LTM 1150/1Document5 pagesProduct Advantages Mobile Crane LTM 1150/1Liebherr100% (2)
- Sumitomo LS 248RH 5 PDFDocument22 pagesSumitomo LS 248RH 5 PDFJorge Barcelo0% (1)
- Cranes IntroductionDocument55 pagesCranes Introductiondsn_sarmaNo ratings yet
- Model m25 Free Fall Service ManualDocument44 pagesModel m25 Free Fall Service ManualManuel Rodriguez100% (1)
- Hitachi Sumitomo SCX2800 2 PDFDocument64 pagesHitachi Sumitomo SCX2800 2 PDFD Rider Casanova100% (1)
- MPH Crane Owners ManualDocument62 pagesMPH Crane Owners ManualVagabond HuynhNo ratings yet
- APE - Manual For200, 200T & 200-6-ADocument41 pagesAPE - Manual For200, 200T & 200-6-ALuis gamboa corderoNo ratings yet
- Link Belt Rough Terrain Cranes Spec 9d470bDocument96 pagesLink Belt Rough Terrain Cranes Spec 9d470bMauro BatalhaNo ratings yet
- UNIC Crane Maintenance Manual PDFDocument38 pagesUNIC Crane Maintenance Manual PDFMel Aliping100% (2)
- Crane Test ProgramDocument17 pagesCrane Test ProgramSONNo ratings yet
- Amphion Maintenance Student ManualDocument515 pagesAmphion Maintenance Student Manualmohamed mohsenNo ratings yet
- Training Program On Crane Basic: Module No: CHSEE-TM-39-L2Document78 pagesTraining Program On Crane Basic: Module No: CHSEE-TM-39-L2rR2CcNo ratings yet
- Drilling Rig PDFDocument464 pagesDrilling Rig PDFfranciscocarvajal15659267% (3)
- PAT DS 350G GW Service ManualDocument64 pagesPAT DS 350G GW Service Manualddedaniel100% (7)
- Mpi-540 Insobs v105 GBDocument212 pagesMpi-540 Insobs v105 GBBenet George VadakkemulanjanalNo ratings yet
- SCM-SCC Operations ManualDocument61 pagesSCM-SCC Operations ManualDaniel CastleNo ratings yet
- 14NL013-MNL-1410 (FT)Document144 pages14NL013-MNL-1410 (FT)hyarub9No ratings yet
- 3RG7843 enDocument62 pages3RG7843 enRaj ChavanNo ratings yet
- SUP-153 (EN) (Earthmoving) 22-185 PQDocument1 pageSUP-153 (EN) (Earthmoving) 22-185 PQNanang PhNo ratings yet
- Asme B30.9 Interpretations-1997Document20 pagesAsme B30.9 Interpretations-1997Nanang PhNo ratings yet
- HDDWFC Confirmed: Contact: Mr. Nanang Puji H Phone: 6282257555989Document1 pageHDDWFC Confirmed: Contact: Mr. Nanang Puji H Phone: 6282257555989Nanang PhNo ratings yet
- Pressure Test in Accordance With The Standard Din en 13445: Inspecta GroupDocument14 pagesPressure Test in Accordance With The Standard Din en 13445: Inspecta GroupNanang PhNo ratings yet
- Your Electronic Ticket Receipt MR HENDRA Y 2 NOV PDFDocument2 pagesYour Electronic Ticket Receipt MR HENDRA Y 2 NOV PDFNanang PhNo ratings yet
- Pressure Test in Accordance With The Standard Din en 13445: Inspecta GroupDocument14 pagesPressure Test in Accordance With The Standard Din en 13445: Inspecta GroupNanang PhNo ratings yet
- API 510 Study PlanDocument7 pagesAPI 510 Study Plankoib789100% (2)
- API 510 Study PlanDocument7 pagesAPI 510 Study Plankoib789100% (2)
- API ICP Contacts and FeedbackDocument1 pageAPI ICP Contacts and FeedbackNanang PhNo ratings yet
- Basics of Imperative Programming ParadigmDocument21 pagesBasics of Imperative Programming ParadigmShabari PrakashNo ratings yet
- Computational ThinkingDocument176 pagesComputational Thinkingazuanr830100% (1)
- Telit at Commands Reference Guide r12Document559 pagesTelit at Commands Reference Guide r12SidhuNo ratings yet
- MC-Module 3 - Written CommunicationDocument13 pagesMC-Module 3 - Written CommunicationCherianXavierNo ratings yet
- Handout For Technical English I IT ISCIM 19hhhDocument63 pagesHandout For Technical English I IT ISCIM 19hhhcornelio marcelinoNo ratings yet
- Alternador Honda LineasDocument2 pagesAlternador Honda LineasJames JonesNo ratings yet
- B.Tech. Engineering VII Semester (New Syllabus Wef 2018-19)Document4 pagesB.Tech. Engineering VII Semester (New Syllabus Wef 2018-19)kunalmotianNo ratings yet
- Concurrent DX 200Document359 pagesConcurrent DX 200AsuvathNo ratings yet
- Dell Service ManualDocument220 pagesDell Service ManualYeik ThaNo ratings yet
- Feynman Lectures On ComputationDocument324 pagesFeynman Lectures On Computationwhyatepie93% (44)
- CNC Macros PDFDocument91 pagesCNC Macros PDF27b7m2100% (6)
- INSTRUCTION: Please Choose The Letter of Your Answer and Encircle The Letter of Your AnswerDocument2 pagesINSTRUCTION: Please Choose The Letter of Your Answer and Encircle The Letter of Your AnswerMark Angelo CastanaresNo ratings yet
- C# - ClassesDocument207 pagesC# - Classesrogerkirk1100% (2)
- Computer Hardware Servicing NC II ExamDocument10 pagesComputer Hardware Servicing NC II ExamKristine CapaoNo ratings yet
- Bartending NC II CGDocument27 pagesBartending NC II CGMj Ortiz100% (1)
- How To Think Like A Computer Scientist - Learning With Python 3 PDFDocument354 pagesHow To Think Like A Computer Scientist - Learning With Python 3 PDFJerry Waxman100% (2)
- Programming and Data Structures: Debasis SamantaDocument63 pagesProgramming and Data Structures: Debasis SamantavittalNo ratings yet
- Information SystemDocument296 pagesInformation SystemSelamawit MekonnenNo ratings yet
- Strategic Renewal of OrganizationsDocument15 pagesStrategic Renewal of OrganizationsMichael LeungNo ratings yet
- Cloud ComputingDocument6 pagesCloud Computingsaurabh_maurya_5No ratings yet
- Pre Mechanicak PDFDocument52 pagesPre Mechanicak PDFCrazy MeNo ratings yet
- Chap 4 Internal ControlDocument23 pagesChap 4 Internal ControlAkash GuptaNo ratings yet
- A To Z Computer Abbreviations - Full Forms For Exams PDF DownloadDocument19 pagesA To Z Computer Abbreviations - Full Forms For Exams PDF DownloadrthrshhdNo ratings yet
- MarkDocument17 pagesMarkMutaawe MMarkNo ratings yet
- Chapter 12 Implications of Information Technology For The Audit ProcessDocument32 pagesChapter 12 Implications of Information Technology For The Audit ProcessYasmine MagdiNo ratings yet
- Basic Parts of A Computer SystemDocument34 pagesBasic Parts of A Computer SystemAMNo ratings yet
- The Information AgeDocument20 pagesThe Information AgeQuinne EstabilloNo ratings yet
- Computing Essentials 2017 26th Edition Oleary Test BankDocument33 pagesComputing Essentials 2017 26th Edition Oleary Test Bankvictoriaperkinsrzksfyjacx100% (33)
- Bachelor in Computer Science PDFDocument4 pagesBachelor in Computer Science PDFKiyanga MbodoNo ratings yet
- How Humor HealsDocument3 pagesHow Humor HealsJohn Michael RacelisNo ratings yet
- Certified Solidworks Professional Advanced Weldments Exam PreparationFrom EverandCertified Solidworks Professional Advanced Weldments Exam PreparationRating: 5 out of 5 stars5/5 (1)
- FreeCAD | Step by Step: Learn how to easily create 3D objects, assemblies, and technical drawingsFrom EverandFreeCAD | Step by Step: Learn how to easily create 3D objects, assemblies, and technical drawingsRating: 5 out of 5 stars5/5 (1)
- CATIA V5-6R2015 Basics - Part I : Getting Started and Sketcher WorkbenchFrom EverandCATIA V5-6R2015 Basics - Part I : Getting Started and Sketcher WorkbenchRating: 4 out of 5 stars4/5 (10)
- Beginning AutoCAD® 2020 Exercise WorkbookFrom EverandBeginning AutoCAD® 2020 Exercise WorkbookRating: 2.5 out of 5 stars2.5/5 (3)
- Design Research Through Practice: From the Lab, Field, and ShowroomFrom EverandDesign Research Through Practice: From the Lab, Field, and ShowroomRating: 3 out of 5 stars3/5 (7)