You might also like
- A16b 1310 0010 01 Power Unit Fanuc Manual PDFDocument635 pagesA16b 1310 0010 01 Power Unit Fanuc Manual PDFNisar AhmedNo ratings yet
- How To Adjust Parameter LBMC GUI User Manual V1.2Document3 pagesHow To Adjust Parameter LBMC GUI User Manual V1.2captainNo ratings yet
- Cmba-4 ManualDocument34 pagesCmba-4 Manualselçuk avcı100% (1)
- Lcd-Sw900 Instructions: 1. Shell's Size and MaterialDocument6 pagesLcd-Sw900 Instructions: 1. Shell's Size and Materialsonda100% (2)
- Installation Guide XB30330Document68 pagesInstallation Guide XB30330almanis0% (1)
- A WC 708 Lite User ManualDocument12 pagesA WC 708 Lite User ManualFernando ZaiaNo ratings yet
- EA2700 ReconfigurationDocument3 pagesEA2700 Reconfigurationdharman_sNo ratings yet
- LCD 24 K 40Document55 pagesLCD 24 K 40Dedi MulyadiNo ratings yet
- TICTOCDocument6 pagesTICTOCArpit PatelNo ratings yet
- General Gps Vehicle Tracker Wetrack2 User ManualDocument20 pagesGeneral Gps Vehicle Tracker Wetrack2 User ManualDanang Irawan0% (1)
- MP4012Document17 pagesMP4012Ba RownaNo ratings yet
- Votol Controler 1Document3 pagesVotol Controler 1Thanh Son NguyenNo ratings yet
- DS-016 Pixhawk Autopilot V6u StandardDocument12 pagesDS-016 Pixhawk Autopilot V6u Standardali almorsedNo ratings yet
- BMS 40a 3S - SGTDocument2 pagesBMS 40a 3S - SGTMarcelo Mannett0% (1)
- 4256-0026 - HIP33000 (10K - 80K-0.9) Neutral User Manual 20140228Document46 pages4256-0026 - HIP33000 (10K - 80K-0.9) Neutral User Manual 20140228mauro benagliaNo ratings yet
- Training Manual S22B350H S23B350H S24B350H S27B350H enDocument66 pagesTraining Manual S22B350H S23B350H S24B350H S27B350H enPaul ChiriacescuNo ratings yet
- Stepper Motor Driver SpecificationDocument5 pagesStepper Motor Driver SpecificationMimo AbduNo ratings yet
- Msi h81m E33 DatasheetDocument1 pageMsi h81m E33 DatasheetMartín Sayago100% (1)
- Fuente 32ld874ht PDFDocument13 pagesFuente 32ld874ht PDFies837No ratings yet
- Gemini PS-924 ManualDocument7 pagesGemini PS-924 ManualfedeNo ratings yet
- Dap011 DDocument24 pagesDap011 Dsontuyet82No ratings yet
- QL ServiceManualDocument98 pagesQL ServiceManualOscar Arthur KoepkeNo ratings yet
- APT Communications Protocol PDFDocument368 pagesAPT Communications Protocol PDFIsrael Zamarripa RamírezNo ratings yet
- Numark NS7 QSG PDFDocument10 pagesNumark NS7 QSG PDFWainer CervantesNo ratings yet
- Mobile Phone: Service ManualDocument129 pagesMobile Phone: Service Manualnatanael100% (1)
- ES Series Hardware Manual170413Document64 pagesES Series Hardware Manual170413Oscar MontañezNo ratings yet
- Euchner Encoder PDFDocument2 pagesEuchner Encoder PDFTimNo ratings yet
- SiemensDocument181 pagesSiemensapi-974825720% (1)
- Samsung Plasma Pn42a450p1Document76 pagesSamsung Plasma Pn42a450p1videoson100% (3)
- 3Cd Changer DVD Karaoke System: Service ManualDocument56 pages3Cd Changer DVD Karaoke System: Service Manualluis262100% (1)
- LG Eay62609701 Pspi-L103aDocument23 pagesLG Eay62609701 Pspi-L103aIvanilto Martins da Cruz100% (1)
- HK.T.rt2842P639 PF7913A Backlight - Limitation - Switch PF7913Document6 pagesHK.T.rt2842P639 PF7913A Backlight - Limitation - Switch PF7913rammerDankovNo ratings yet
- 08 SM A107 Tshoo 7 PDFDocument20 pages08 SM A107 Tshoo 7 PDFAndrey ChersonNo ratings yet
- ISL95836 Datasheet - Dual 3+2 PWM Controller - Intersil RenesasDocument33 pagesISL95836 Datasheet - Dual 3+2 PWM Controller - Intersil RenesasRodrigo BentoNo ratings yet
- Tabela Completa de Fabricantes de Placas PCIDocument304 pagesTabela Completa de Fabricantes de Placas PCIi.Opt100% (1)
- Datasheet - HK cn1016 1227640Document2 pagesDatasheet - HK cn1016 1227640Reinaldo KoslowskiNo ratings yet
- Schematic Diagram: 7-1. Circuit DescriptionsDocument6 pagesSchematic Diagram: 7-1. Circuit Descriptionsivo rodriguesNo ratings yet
- Sony Vaio VPCEH2N1E MBX-247 Schematic Diagram Quanta HK1Document39 pagesSony Vaio VPCEH2N1E MBX-247 Schematic Diagram Quanta HK1SRG InfoTechNo ratings yet
- Bitzer 4CES-6YDocument2 pagesBitzer 4CES-6YIchsan DKNo ratings yet
- New Step Servo Driver-DL86H Manual: CatalogDocument7 pagesNew Step Servo Driver-DL86H Manual: CatalogKacper GorajNo ratings yet
- Analizer EU1KY Var1.2Document13 pagesAnalizer EU1KY Var1.2Augustin SerbanNo ratings yet
- LCD Repair)Document57 pagesLCD Repair)Nurul Azurin Syukri AdnanNo ratings yet
- Testing Flybacks and Yokes With The RINGER TestDocument4 pagesTesting Flybacks and Yokes With The RINGER TestS a y oNo ratings yet
- Eee PC 1225b Service Manual PDFDocument2 pagesEee PC 1225b Service Manual PDFaldi 88No ratings yet
- Icom 718 Mars ModDocument1 pageIcom 718 Mars Modojessen85No ratings yet
- Boot Menu Reference ListDocument5 pagesBoot Menu Reference ListRusselguide ElectronicsNo ratings yet
- 4axis USBCNC Manual tb60Document31 pages4axis USBCNC Manual tb60jeju233No ratings yet
- For Safe Operation: Description of Error DetectedDocument1 pageFor Safe Operation: Description of Error DetectedAmjad HossenNo ratings yet
- Changzhou Wantai Electrical Appliance Co., LTD: User Guide For 3 Axis TB6560 Driver BoardDocument9 pagesChangzhou Wantai Electrical Appliance Co., LTD: User Guide For 3 Axis TB6560 Driver Boardjulio cesar rosales mendezNo ratings yet
- Changzhou Wantai Electrical Appliance Co., LTD: Product FeaturesDocument10 pagesChangzhou Wantai Electrical Appliance Co., LTD: Product FeaturesMarcos AndréNo ratings yet
- HY-TB3DV-N 3 Axis Driver Board ManualDocument10 pagesHY-TB3DV-N 3 Axis Driver Board Manualafricano333No ratings yet
- HY-TB3DV-M 3axis Driver PDFDocument10 pagesHY-TB3DV-M 3axis Driver PDFjoelgcrNo ratings yet
- 3 Axis TB6560 CNC Driver Board Users ManualDocument10 pages3 Axis TB6560 CNC Driver Board Users ManualSibiagny Villegas ArroyoNo ratings yet
- HY-TB4DV-N 4 Axis Driver Board ManualDocument11 pagesHY-TB4DV-N 4 Axis Driver Board Manualafricano333No ratings yet
- TB6560 Mach3 CNC Stepper Motor Controller Operation InstructionDocument19 pagesTB6560 Mach3 CNC Stepper Motor Controller Operation InstructionCornel BordeiNo ratings yet
- TB6560 3axis DriverDocument11 pagesTB6560 3axis DriverPHQ1910No ratings yet
- TB6560 3axis Mach3 CNC Stepper Motor Controller Operation InstructionDocument18 pagesTB6560 3axis Mach3 CNC Stepper Motor Controller Operation InstructionAdelNo ratings yet
- Motor Driver Board Tb6560-5axisDocument14 pagesMotor Driver Board Tb6560-5axisAli Asghar MuzzaffarNo ratings yet
- HY-TB4DV-M 4axis DriverDocument14 pagesHY-TB4DV-M 4axis DriverJeferson SalazarNo ratings yet
- Mechatronics: 3 and 4 Axis Micro Stepper Motor Driver DatasheetDocument12 pagesMechatronics: 3 and 4 Axis Micro Stepper Motor Driver Datasheetedgar zambranoNo ratings yet
- HY-JK02-M 5-Axis Interface Board ManualDocument11 pagesHY-JK02-M 5-Axis Interface Board ManualMarcos AndréNo ratings yet
- User Manual 5 Axis Breakout BoardDocument10 pagesUser Manual 5 Axis Breakout BoardDavid FernandezNo ratings yet
- O359h MilDocument90 pagesO359h MilNisar AhmedNo ratings yet
- Ug-26 Skad-Kad 04Document1 pageUg-26 Skad-Kad 04Nisar AhmedNo ratings yet
- Thermal Overload RelaysDocument6 pagesThermal Overload RelaysNisar AhmedNo ratings yet
- Em-Xx IngDocument1 pageEm-Xx IngNisar AhmedNo ratings yet
- Em-Xx IngDocument1 pageEm-Xx IngNisar AhmedNo ratings yet
- Dav-Xxx IngDocument1 pageDav-Xxx IngNisar AhmedNo ratings yet
- RS-422 Splitter PDFDocument1 pageRS-422 Splitter PDFNisar AhmedNo ratings yet
- Rs-422 Splitter Circuit DiagramDocument1 pageRs-422 Splitter Circuit DiagramNisar AhmedNo ratings yet
- HV350 CatalogDocument5 pagesHV350 CatalogNisar AhmedNo ratings yet
- Ug-26 Skad-Kad 04Document1 pageUg-26 Skad-Kad 04Nisar AhmedNo ratings yet
- Irt WP12 230 PDFDocument2 pagesIrt WP12 230 PDFNisar AhmedNo ratings yet
- GK-XX IngDocument1 pageGK-XX IngNisar AhmedNo ratings yet
- Standard Heavy Duty Limit Switches FD/FP/FL: Options and Ordering CodesDocument9 pagesStandard Heavy Duty Limit Switches FD/FP/FL: Options and Ordering CodesNisar AhmedNo ratings yet
- RS-422 and RS-485 Application Note: International HeadquartersDocument22 pagesRS-422 and RS-485 Application Note: International HeadquartersNisar AhmedNo ratings yet
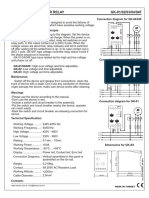
- Voltage and Phase RelayDocument1 pageVoltage and Phase RelayNisar AhmedNo ratings yet
- GK-XX IngDocument1 pageGK-XX IngNisar AhmedNo ratings yet
- 2 - Cables and TablesDocument51 pages2 - Cables and Tablesnewton20100% (5)
- P2796RLW IP55 Rugged ServerDocument3 pagesP2796RLW IP55 Rugged ServerNisar AhmedNo ratings yet
- DS8922 NationalSemiconductor Elenota - PLDocument14 pagesDS8922 NationalSemiconductor Elenota - PLNisar AhmedNo ratings yet
- Temperature and Humidity SensorDocument1 pageTemperature and Humidity SensorNisar AhmedNo ratings yet
- Model 9200-2123: 1 RS-422 Input/3 RS-422 Output ModuleDocument2 pagesModel 9200-2123: 1 RS-422 Input/3 RS-422 Output ModuleNisar AhmedNo ratings yet
- B50TF74Document6 pagesB50TF74Adrian FinichiuNo ratings yet
- FerrocementDocument19 pagesFerrocementayoushika abrolNo ratings yet
- Gtsio-520 Series IpcDocument92 pagesGtsio-520 Series IpcPedro Paternina100% (1)
- RJ45 Mosaic 1Document5 pagesRJ45 Mosaic 1Alexandra MihaelaNo ratings yet
- Physical and Mechanical Properties of ePTFE Stretch Vascular Grafts Determined by Time-Resolved Scanning Acoustic MicrosDocument7 pagesPhysical and Mechanical Properties of ePTFE Stretch Vascular Grafts Determined by Time-Resolved Scanning Acoustic MicrosRobNo ratings yet
- SOLIS Export Limit Settings Using A CT ClampDocument4 pagesSOLIS Export Limit Settings Using A CT ClampEarl IneNo ratings yet
- Electronics 1940 06Document116 pagesElectronics 1940 06Jose Luis FernandezNo ratings yet
- Appendix BDocument16 pagesAppendix BSagar G ReddyNo ratings yet
- Open Channel Flow Gate Notes 65Document5 pagesOpen Channel Flow Gate Notes 65Saurabh SinghNo ratings yet
- Gates, D.M. - Transpiration and Leaf Temperature - 1968 - Annurevpp19060168001235Document28 pagesGates, D.M. - Transpiration and Leaf Temperature - 1968 - Annurevpp19060168001235leandrodrigues14No ratings yet
- CertoClav Autoclaves Brochure 2014Document6 pagesCertoClav Autoclaves Brochure 2014Maruthi KNo ratings yet
- Sample Lesson Plan 3 Grade 7 Mathematics 1Document3 pagesSample Lesson Plan 3 Grade 7 Mathematics 1api-452943700100% (1)
- Hughes, Structure and Interpretation of Quantum MechanicsDocument382 pagesHughes, Structure and Interpretation of Quantum MechanicsRogério P. Severo100% (1)
- DK20 Maintenance Schedule 00Document1 pageDK20 Maintenance Schedule 00Tom AlNo ratings yet
- Faulty ReasoningDocument44 pagesFaulty ReasoningASAD ULLAHNo ratings yet
- Performance Corrections For Steam Turbines With Multi-Pressure CondenserDocument8 pagesPerformance Corrections For Steam Turbines With Multi-Pressure CondenserSujeet Kumar50% (2)
- Laser Cutting From First Principles To The State of The ArtDocument6 pagesLaser Cutting From First Principles To The State of The ArtJing YinNo ratings yet
- Phenomenon of KnockingDocument30 pagesPhenomenon of KnockingTrain Placement Cell67% (3)
- Unit IvDocument20 pagesUnit IvArwaz KhanNo ratings yet
- Solution To 2020 AIME IDocument3 pagesSolution To 2020 AIME IzarifNo ratings yet
- Moldcast Contra Cline Washington Globe & Savannah Lantern Brochure 1996Document10 pagesMoldcast Contra Cline Washington Globe & Savannah Lantern Brochure 1996Alan MastersNo ratings yet
- When The Joukowsky Equation Does Not Predict Maximum Water Hammer PressuresDocument11 pagesWhen The Joukowsky Equation Does Not Predict Maximum Water Hammer PressuresFrancisco OppsNo ratings yet
- Tools & Equipment Report: Pt. Duta Utama Tehnik AbadiDocument3 pagesTools & Equipment Report: Pt. Duta Utama Tehnik AbadiMa'rifatullahNo ratings yet
- Manuale D'uso BR100 - V1.19 enDocument104 pagesManuale D'uso BR100 - V1.19 enClaudio MoraNo ratings yet
- Lecture8-Forecasting EarthquakesDocument18 pagesLecture8-Forecasting EarthquakesaikatanbiswasNo ratings yet
- Cortina Fotoelectrica CedesDocument28 pagesCortina Fotoelectrica CedeslibarmuNo ratings yet
- What Is GDM2000Document4 pagesWhat Is GDM2000Zulhelmi Ahmad100% (3)
- Bond Strength of Coconut Shell Aggregate Concrete by Pull-Out TestDocument14 pagesBond Strength of Coconut Shell Aggregate Concrete by Pull-Out TestlintianananNo ratings yet
- Linked List A5Document196 pagesLinked List A5蔡炅宸No ratings yet