You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (844)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5810)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Prehistoric Rock Art (UNESCO)Document36 pagesPrehistoric Rock Art (UNESCO)aaras.map100% (6)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- How To Replace C52 KefDocument7 pagesHow To Replace C52 KefSheena Cotterill100% (1)
- Water Injection Manual (Preview)Document17 pagesWater Injection Manual (Preview)George Wiseman100% (1)
- D425ie D5100 enDocument45 pagesD425ie D5100 enSelamet RezkiNo ratings yet
- Make Green 2Document7 pagesMake Green 2cronox447No ratings yet
- Global Roaming Tutorial For LTE Only Operators White Paper V1.0Document41 pagesGlobal Roaming Tutorial For LTE Only Operators White Paper V1.0Azmir MNo ratings yet
- Kindergarten Community Unit PlanDocument7 pagesKindergarten Community Unit Planapi-384353191No ratings yet
- PV Elite Training-MAWP Reduction PV EliteDocument8 pagesPV Elite Training-MAWP Reduction PV EliterakicbgNo ratings yet
- Silverman 1991 - Writing Grant Proposals For Anthropological ResearchDocument6 pagesSilverman 1991 - Writing Grant Proposals For Anthropological ResearchHéctor Cardona MachadoNo ratings yet
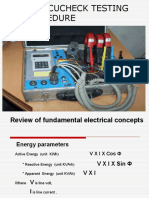
- LT Accucheck Testing ProcedureDocument15 pagesLT Accucheck Testing ProcedureGautam ChattopadhyayNo ratings yet
- ResearchDocument5 pagesResearchNyhtes EsohpNo ratings yet
- Tech 444-Ulo 2a 2B Lets Check-OlivaDocument6 pagesTech 444-Ulo 2a 2B Lets Check-OlivaCj SuarezNo ratings yet
- Chapter-2 Answer KeyDocument18 pagesChapter-2 Answer KeyKylie sheena MendezNo ratings yet
- Mini Link Nec ConfigurationDocument18 pagesMini Link Nec ConfigurationdavinderNo ratings yet
- Syllabus of Medical Licensing ExaminationDocument3 pagesSyllabus of Medical Licensing Examinationapi-370059967% (3)
- Between Empire and GlobalizationDocument5 pagesBetween Empire and Globalizationazert yuiopNo ratings yet
- IGuard LM Manual ENGDocument92 pagesIGuard LM Manual ENGAntónio LeitãoNo ratings yet
- Non ProfitDocument7 pagesNon ProfitBabatunde DokunNo ratings yet
- Correcting Students' Errors: Theory and Practice: June 2018Document14 pagesCorrecting Students' Errors: Theory and Practice: June 2018Ella Mansel (Carmen M.)No ratings yet
- Zeta A La Carte Menu 3rd OctoberDocument4 pagesZeta A La Carte Menu 3rd OctoberLokka TrieNo ratings yet
- Learning Plan FOR Contemporary WorldDocument10 pagesLearning Plan FOR Contemporary WorldAishah SangcopanNo ratings yet
- Class 7 Model PapersDocument19 pagesClass 7 Model PapersMuhammad AhmedNo ratings yet
- Principles of ArtsDocument19 pagesPrinciples of ArtsMiles SerranoNo ratings yet
- Ais Fraud-Case StudyDocument3 pagesAis Fraud-Case StudyErica AlimpolosNo ratings yet
- PCC - Delhipolice.gov - in ViewStatus - AspxDocument2 pagesPCC - Delhipolice.gov - in ViewStatus - AspxMAAHI CYBER SOLUTIONNo ratings yet
- Catalog - Ambica Steels LimitedDocument32 pagesCatalog - Ambica Steels Limitedmuru gesanNo ratings yet
- Analisis Sootblower Terhadap Head TransferDocument5 pagesAnalisis Sootblower Terhadap Head TransferRDSetyawanNo ratings yet
- Manual Book of Kawasaki Ninja H2RDocument17 pagesManual Book of Kawasaki Ninja H2RAdit IndraNo ratings yet
- Palm Beach Social Diary New York Social DiaryDocument43 pagesPalm Beach Social Diary New York Social DiaryHerb ZydneyNo ratings yet