You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- FPGA Programming Step by Step - EmbeddedDocument4 pagesFPGA Programming Step by Step - EmbeddedsalonyNo ratings yet
- Online Food Wastage Reduction Through Orphanage Donation SystemDocument4 pagesOnline Food Wastage Reduction Through Orphanage Donation SystemMaruthi TechnologiesNo ratings yet
- List Alat TrimbleDocument4 pagesList Alat TrimbleAldi SuyanaNo ratings yet
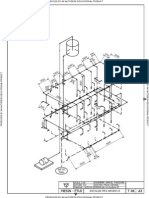
- Pipa SamuelDocument1 pagePipa SamuelAldi SuyanaNo ratings yet
- Bimbingan 1Document1 pageBimbingan 1Aldi SuyanaNo ratings yet
- CV Saiful HabibDocument3 pagesCV Saiful HabibAldi SuyanaNo ratings yet
- Chart Material PDFDocument17 pagesChart Material PDFAldi SuyanaNo ratings yet
- PWMDocument2 pagesPWMAldi SuyanaNo ratings yet
- GoalkeepersDocument3 pagesGoalkeepersAldi SuyanaNo ratings yet
- Kombinasi Motor LedDocument2 pagesKombinasi Motor LedAldi SuyanaNo ratings yet
- Led BerurutanDocument1 pageLed BerurutanAldi SuyanaNo ratings yet
- Kombinasi Motor LedDocument2 pagesKombinasi Motor LedAldi SuyanaNo ratings yet
- PWMDocument2 pagesPWMAldi SuyanaNo ratings yet
- Ldr&rata 2Document3 pagesLdr&rata 2Aldi SuyanaNo ratings yet
- PerhitunganDocument21 pagesPerhitunganAldi SuyanaNo ratings yet
- Pemodelan Kebakaran Dan Simulasi Proses Evakuasi Penumpang Kapal. Studi Kasus KMP LautDocument7 pagesPemodelan Kebakaran Dan Simulasi Proses Evakuasi Penumpang Kapal. Studi Kasus KMP LautAldi SuyanaNo ratings yet
- Get Paksa Forced Vib OkDocument38 pagesGet Paksa Forced Vib OkAldi SuyanaNo ratings yet
- Tutorial 2Document5 pagesTutorial 2Aldi SuyanaNo ratings yet
- Means of Escape PDFDocument12 pagesMeans of Escape PDFAldi SuyanaNo ratings yet
- 1 - Tinjauan Eksistensi StandarDocument14 pages1 - Tinjauan Eksistensi StandarDewi AnggrainiNo ratings yet
- Tutorial 1Document5 pagesTutorial 1Aldi SuyanaNo ratings yet
- Percobaan 1Document4 pagesPercobaan 1Aldi SuyanaNo ratings yet
- P2 E333 enDocument79 pagesP2 E333 enMabo81No ratings yet
- New Text DocumentDocument363 pagesNew Text Documentrahul paulNo ratings yet
- Pwn2Own 2014 AFD - Sys Privilege EscalationDocument16 pagesPwn2Own 2014 AFD - Sys Privilege Escalationc583162No ratings yet
- Run Commands For Windows XPDocument3 pagesRun Commands For Windows XPvisujinu100% (9)
- Executive Information System (EIS) Definition: Got A Question On This Topic?Document4 pagesExecutive Information System (EIS) Definition: Got A Question On This Topic?Khushal KumarNo ratings yet
- Crit PathDocument6 pagesCrit PathSanjay TiwariNo ratings yet
- Presentasi Bhs InggrisDocument13 pagesPresentasi Bhs InggrisSukron JazilaNo ratings yet
- Master MST3000 Motorcycle Scanner User ManualDocument18 pagesMaster MST3000 Motorcycle Scanner User Manualobd365No ratings yet
- Deepika Mahajan: ObjectivesDocument3 pagesDeepika Mahajan: ObjectivesDeepika MahajanNo ratings yet
- Python Basics-2Document94 pagesPython Basics-2mahendra naikNo ratings yet
- WD Black: PC Hard DrivesDocument3 pagesWD Black: PC Hard DrivesStephanNo ratings yet
- TCP 3151Document3 pagesTCP 3151Beenu MagoNo ratings yet
- Compal La-9902p r1.0 Schematics PDFDocument53 pagesCompal La-9902p r1.0 Schematics PDFhiteshNo ratings yet
- Appstore LogDocument119 pagesAppstore LogKayla PriyonoNo ratings yet
- OOT TutorialDocument3 pagesOOT TutorialChaeriah WaelNo ratings yet
- IT - Information Systems AuditingDocument4 pagesIT - Information Systems AuditingIlma Hudalina FumasaNo ratings yet
- Build An Internet Infrastructure Final ExamDocument2 pagesBuild An Internet Infrastructure Final ExamADEM ASRES100% (4)
- ZXComputing Dec-Jan 1985Document164 pagesZXComputing Dec-Jan 1985ryosaeba666No ratings yet
- Advanced Java SlidesDocument134 pagesAdvanced Java SlidesDeepa SubramanyamNo ratings yet
- Resize Partitions in VistaDocument59 pagesResize Partitions in Vistakds incNo ratings yet
- IBM Debug Tool For ZOS - Tutorial - What You Need Know About v14Document31 pagesIBM Debug Tool For ZOS - Tutorial - What You Need Know About v14Roberto LucenaNo ratings yet
- Dietpi-Benchmarks - CpuDocument13 pagesDietpi-Benchmarks - CpuFelipeNo ratings yet
- Practical: 1: Aim: Getting Started With Nodemcu, Arduino With Esp8266 and Esp32 in The Arduino IdeDocument25 pagesPractical: 1: Aim: Getting Started With Nodemcu, Arduino With Esp8266 and Esp32 in The Arduino IdeGanesh GhutiyaNo ratings yet
- 3 Unit 3-Arduino Programming - 11march2022Document35 pages3 Unit 3-Arduino Programming - 11march2022patilamrutak2003No ratings yet
- Online Shopping Site For Mobiles, Electronics, Furniture, Grocery, Lifestyle, Books & More. Best Offers!Document4 pagesOnline Shopping Site For Mobiles, Electronics, Furniture, Grocery, Lifestyle, Books & More. Best Offers!santanu_1310No ratings yet
- Module-2 DDL PosterDocument4 pagesModule-2 DDL PosterDavid ChanNo ratings yet
- CSCI 4717/5717 Computer Architecture Buses - Common CharacteristicsDocument9 pagesCSCI 4717/5717 Computer Architecture Buses - Common CharacteristicsAsjsjsjsNo ratings yet
- ATV71 MODBUS manEN05Document45 pagesATV71 MODBUS manEN05freud007No ratings yet