You might also like
- Math Stats Booklet 1Document20 pagesMath Stats Booklet 1Koh Boon HaoNo ratings yet
- Trigonometric Ratios to Transformations (Trigonometry) Mathematics E-Book For Public ExamsFrom EverandTrigonometric Ratios to Transformations (Trigonometry) Mathematics E-Book For Public ExamsRating: 5 out of 5 stars5/5 (1)
- One Degree of Freedom, Harmonically Excited Vibrations: Forced Harmonic VibrationDocument15 pagesOne Degree of Freedom, Harmonically Excited Vibrations: Forced Harmonic VibrationUmair Mirza100% (1)
- Mathematics 1St First Order Linear Differential Equations 2Nd Second Order Linear Differential Equations Laplace Fourier Bessel MathematicsFrom EverandMathematics 1St First Order Linear Differential Equations 2Nd Second Order Linear Differential Equations Laplace Fourier Bessel MathematicsNo ratings yet
- MECHANICAL ENGINEERING FORMULA SHEETDocument4 pagesMECHANICAL ENGINEERING FORMULA SHEETrdude93No ratings yet
- Application of Derivatives Tangents and Normals (Calculus) Mathematics E-Book For Public ExamsFrom EverandApplication of Derivatives Tangents and Normals (Calculus) Mathematics E-Book For Public ExamsRating: 5 out of 5 stars5/5 (1)
- Fizika Formule 1. KolokvijDocument1 pageFizika Formule 1. Kolokvijkosto1234No ratings yet
- Inverse Trigonometric Functions (Trigonometry) Mathematics Question BankFrom EverandInverse Trigonometric Functions (Trigonometry) Mathematics Question BankNo ratings yet
- Response of MDOF SystemsDocument28 pagesResponse of MDOF SystemsSalvador SilveyraNo ratings yet
- 2.super Position of Periodic MotionsDocument47 pages2.super Position of Periodic Motionsvsnmurthy1No ratings yet
- Vibrations Chapter 5 - 2013 - ModDocument48 pagesVibrations Chapter 5 - 2013 - ModZain BaqarNo ratings yet
- Spectral Estimation ModernDocument43 pagesSpectral Estimation ModernHayder MazinNo ratings yet
- Transform Analysis of LTI SystemsDocument117 pagesTransform Analysis of LTI SystemsreneeshczNo ratings yet
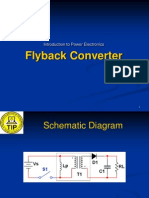
- Lesson 9 - Flyback ConverterDocument31 pagesLesson 9 - Flyback ConverterJhana Kimberly S. AquinoNo ratings yet
- Z Transform and It's ApplicationsDocument11 pagesZ Transform and It's Applicationsলাজ মাহমুদNo ratings yet
- MATLAB FormulasDocument3 pagesMATLAB FormulasRoberto Alessandro IonescuNo ratings yet
- ROOT FINDINGDocument3 pagesROOT FINDINGyana22No ratings yet
- Final ExamDocument3 pagesFinal ExamMark Cliffton BadlonNo ratings yet
- 2 Basics DSP AV Z Filters NoiseDocument31 pages2 Basics DSP AV Z Filters NoisevignanarajNo ratings yet
- Final 20 21iDocument9 pagesFinal 20 21ialikhalidd23No ratings yet
- Transfer function and filter design for multi-speaker audio circuitDocument5 pagesTransfer function and filter design for multi-speaker audio circuitno NameNo ratings yet
- Transformasi-Z Langsung dan SifatnyaDocument53 pagesTransformasi-Z Langsung dan SifatnyaZaky DarmawanNo ratings yet
- Lesson 2.0 DFTDocument42 pagesLesson 2.0 DFTKrishna Ram BudhathokiNo ratings yet
- Harmonically Excited VibrationDocument13 pagesHarmonically Excited VibrationRommel BlancoNo ratings yet
- Some Basic Formulae:: Quadratic FormulaDocument6 pagesSome Basic Formulae:: Quadratic FormulaBlazingStudiosNo ratings yet
- AIEEE MathsDocument3 pagesAIEEE MathsSk SharukhNo ratings yet
- Noise in Communication SystemsDocument21 pagesNoise in Communication Systemsulfar uulNo ratings yet
- ECSE 353 FormulasDocument6 pagesECSE 353 FormulasEileen FuNo ratings yet
- Free VibrationDocument8 pagesFree VibrationPrakash DuraisamyNo ratings yet
- Exercise 3Document4 pagesExercise 3Amrinder SetiaNo ratings yet
- Useful Inequalities: v0.20b July 22, 2013Document3 pagesUseful Inequalities: v0.20b July 22, 2013George ProtopapasNo ratings yet
- Ch. 2 Free Vibration AnalysisDocument32 pagesCh. 2 Free Vibration AnalysisHFNo ratings yet
- Nonlinear Optics Lecture 6Document16 pagesNonlinear Optics Lecture 6t8enedNo ratings yet
- Finite Differencing Method for Numerical Solution of PDEsDocument30 pagesFinite Differencing Method for Numerical Solution of PDEsQasim AliNo ratings yet
- Quadrapole - Parmisse DURRANI-2006Document36 pagesQuadrapole - Parmisse DURRANI-2006parmisd84No ratings yet
- PhononsDocument25 pagesPhononsPeter Đình-Khôi NguyễnNo ratings yet
- X. Reactions x.1 Order of Reactions x.1.01 Zero Order ReactionsDocument28 pagesX. Reactions x.1 Order of Reactions x.1.01 Zero Order ReactionsJon Bisu DebnathNo ratings yet
- Response to Rectangular Pulse Excitation in Structural DynamicsDocument72 pagesResponse to Rectangular Pulse Excitation in Structural DynamicsTodd MaxeyNo ratings yet
- ME677c6 FrequencyAnalysis TDocument21 pagesME677c6 FrequencyAnalysis TElizabeth JohnsNo ratings yet
- Stochastic Structural Dynamics Lecture-10: Random Vibrations of Sdof Systems-2Document46 pagesStochastic Structural Dynamics Lecture-10: Random Vibrations of Sdof Systems-2Kajal KhanNo ratings yet
- Presentation 1 Lecture 01Document17 pagesPresentation 1 Lecture 01Nitin GroverNo ratings yet
- Frequency ResponseDocument9 pagesFrequency ResponseAnanda RamanNo ratings yet
- DRM SolutionsDocument116 pagesDRM SolutionsCésar TapiaNo ratings yet
- Fourier SeriesDocument26 pagesFourier SeriesPurushothamanNo ratings yet
- MV Forced Vibrations NotesDocument51 pagesMV Forced Vibrations NotesalokNo ratings yet
- Chapter 4 Sampling of Continuous-Time Signals: Biomedical Signal ProcessingDocument19 pagesChapter 4 Sampling of Continuous-Time Signals: Biomedical Signal ProcessingHari2905No ratings yet
- Implement Ac I OnDocument26 pagesImplement Ac I OnMaria GreenNo ratings yet
- Successive Differentiation and Leibnitz's TheoremDocument14 pagesSuccessive Differentiation and Leibnitz's TheoremNafi AhmedNo ratings yet
- Lossy MediumDocument21 pagesLossy MediumMehmood ShahNo ratings yet
- MillNotes MithrilDocument2 pagesMillNotes MithrilChristopher MillerNo ratings yet
- Signals and Systems Linear System Theory: EE 112 - Lecture Eight Signal ClassificationDocument25 pagesSignals and Systems Linear System Theory: EE 112 - Lecture Eight Signal ClassificationMadan Mohan Kannojiya100% (1)
- Probabilistic Robotics: Bayes Filter ImplementationsDocument61 pagesProbabilistic Robotics: Bayes Filter ImplementationsShaik MasthanNo ratings yet
- Slides - Complete Variance Decomposition MethodsDocument21 pagesSlides - Complete Variance Decomposition MethodsGeraldo Rossoni SisquiniNo ratings yet
- Appendix E: Properties of Special FunctionsDocument13 pagesAppendix E: Properties of Special FunctionsAdrian MarcuNo ratings yet
- W P Iv - Q P: Sourabh DubeDocument4 pagesW P Iv - Q P: Sourabh DubeNitinKumarNo ratings yet
- Introduction To ROBOTICS: Velocity Analysis JacobianDocument32 pagesIntroduction To ROBOTICS: Velocity Analysis Jacobianal7123No ratings yet
- Ten-Decimal Tables of the Logarithms of Complex Numbers and for the Transformation from Cartesian to Polar Coordinates: Volume 33 in Mathematical Tables SeriesFrom EverandTen-Decimal Tables of the Logarithms of Complex Numbers and for the Transformation from Cartesian to Polar Coordinates: Volume 33 in Mathematical Tables SeriesNo ratings yet
- Introductory Differential Equations: with Boundary Value Problems, Student Solutions Manual (e-only)From EverandIntroductory Differential Equations: with Boundary Value Problems, Student Solutions Manual (e-only)No ratings yet