You might also like
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5795)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
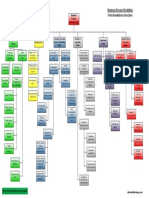
- BPM WBSDocument1 pageBPM WBSALEJANDRANo ratings yet
- Fill in The Blank QuestionsDocument16 pagesFill in The Blank QuestionsDave Smith50% (2)
- Comparative Study of Classification Algorithms Used For The Prediction of Non-Communicable DiseasesDocument4 pagesComparative Study of Classification Algorithms Used For The Prediction of Non-Communicable DiseasesWARSE JournalsNo ratings yet
- Lecture 1 (Introduction-Homeostasis)Document15 pagesLecture 1 (Introduction-Homeostasis)Lyana A. RahmanNo ratings yet
- Engineering Approach To Develop Software.: Systematic Collection of Past ExperienceDocument20 pagesEngineering Approach To Develop Software.: Systematic Collection of Past ExperienceMayank KumarNo ratings yet
- Based On The PEAS Formulation, We Can Characterize The Wolfram Alpha AI System As FollowsDocument12 pagesBased On The PEAS Formulation, We Can Characterize The Wolfram Alpha AI System As Followsdaniel MisganawNo ratings yet
- Chapter 6 Analysis of Feedback Control SystemsDocument44 pagesChapter 6 Analysis of Feedback Control Systemsİbrahim BuldukNo ratings yet
- About SOFTWARE ENGINEERINGDocument3 pagesAbout SOFTWARE ENGINEERINGKing Is BackNo ratings yet
- Object Oriented Analysis and Design: Applying UML and Patterns - Craig LarmanDocument17 pagesObject Oriented Analysis and Design: Applying UML and Patterns - Craig LarmanInnoxentDollNo ratings yet
- Test Plan TemplateDocument11 pagesTest Plan Templateapi-3806986100% (8)
- Harbours and Maritime Networks As Comple PDFDocument1 pageHarbours and Maritime Networks As Comple PDFIdea HistNo ratings yet
- DL Lab ManualDocument65 pagesDL Lab ManualmukeshNo ratings yet
- Day School 05Document80 pagesDay School 05Navodye GunathilakaNo ratings yet
- Course Code: EE303 Linear Control Systems 2-1-0-3 2016 Prerequisite: NilDocument2 pagesCourse Code: EE303 Linear Control Systems 2-1-0-3 2016 Prerequisite: NilSUNOBHAINo ratings yet
- SubtitleDocument3 pagesSubtitleRitik JainNo ratings yet
- Railway Reservation SystemDocument32 pagesRailway Reservation SystemABCNo ratings yet
- Deep Learning MCQDocument34 pagesDeep Learning MCQneha Shukla91% (69)
- SDLC Lo1 P1 P2 Completed Plag CheckDocument7 pagesSDLC Lo1 P1 P2 Completed Plag CheckUltra ChannelNo ratings yet
- DevelopmentThatPays TheLeanStartup CheatSheet 1 - 0 PDFDocument1 pageDevelopmentThatPays TheLeanStartup CheatSheet 1 - 0 PDFHamed KamelNo ratings yet
- D - Stability AnalysisDocument5 pagesD - Stability AnalysisAnanthan SrijithNo ratings yet
- 2012 Book RobotMotionAndControl2011Document425 pages2012 Book RobotMotionAndControl2011鄭至峻No ratings yet
- 2022 Dme 483 Reliability Block DiagramDocument21 pages2022 Dme 483 Reliability Block Diagrammohammad umairNo ratings yet
- Software Testing and Quality Assurance - : Unit - 1 Two Marks QuestionsDocument5 pagesSoftware Testing and Quality Assurance - : Unit - 1 Two Marks QuestionsAanchal Padmavat100% (2)
- 4 Managing Systems ProjectsDocument43 pages4 Managing Systems Projectscr4v3nNo ratings yet
- Dryer SystemDocument22 pagesDryer Systemtharani mohanNo ratings yet
- SMC RMI February 2023 CONSO REVISEDDocument174 pagesSMC RMI February 2023 CONSO REVISEDFrancisCarloTadenaNo ratings yet
- 1.1 Introduction To Software EngineeringDocument25 pages1.1 Introduction To Software EngineeringArrahim FitrahNo ratings yet
- RL Network: Control Systems Engineering, Fourth Edition by Norman S. NiseDocument33 pagesRL Network: Control Systems Engineering, Fourth Edition by Norman S. NiseEmir ÇokdoğanNo ratings yet
- Problem FormulationDocument11 pagesProblem FormulationAdri JovinNo ratings yet
- BPAS-184 Ignouassignmentguru - Com DEC21Document4 pagesBPAS-184 Ignouassignmentguru - Com DEC21AtomNo ratings yet