You might also like
- Components for Pneumatic Control Instruments: The Static and Dynamic Characteristics of Pneumatic Resistances, Capacitances and Transmission LinesFrom EverandComponents for Pneumatic Control Instruments: The Static and Dynamic Characteristics of Pneumatic Resistances, Capacitances and Transmission LinesNo ratings yet
- Motor Sizing Made EasyDocument3 pagesMotor Sizing Made EasyTurbosMixerNo ratings yet
- Servo Motor SelectionDocument11 pagesServo Motor Selectionanandparasu100% (1)
- Calculation of Torque For Selection of MotorDocument6 pagesCalculation of Torque For Selection of Motoratanughosh125100% (6)
- Solenoid Actuators: Theory and Computational MethodsFrom EverandSolenoid Actuators: Theory and Computational MethodsRating: 3 out of 5 stars3/5 (1)
- Motor Selection 1Document2 pagesMotor Selection 1s_mahes100% (1)
- Electrical Motor Products: International Energy-Efficiency Standards and Testing MethodsFrom EverandElectrical Motor Products: International Energy-Efficiency Standards and Testing MethodsNo ratings yet
- Motor Sizing CalculationDocument3 pagesMotor Sizing CalculationRizwan TahirNo ratings yet
- Basic Motor Formulas and Calculations: Rules of Thumb (Approximation)Document10 pagesBasic Motor Formulas and Calculations: Rules of Thumb (Approximation)Angga Prasetya KusumanataNo ratings yet
- Torque and Inertia CalculationsDocument20 pagesTorque and Inertia Calculationsmanfredm6435No ratings yet
- Tutorial Problems: Problem 1Document8 pagesTutorial Problems: Problem 1Omar ZamalkawyNo ratings yet
- Motor Sizing Made EasyDocument3 pagesMotor Sizing Made EasySergio Otero0% (1)
- White Paper - A Comparison of The Characteristics of AC and DC Motors - B7096-2Document13 pagesWhite Paper - A Comparison of The Characteristics of AC and DC Motors - B7096-2tekhakkoNo ratings yet
- Basic Motor Formulas And Calculations GuideDocument9 pagesBasic Motor Formulas And Calculations Guidemareymorsy2822100% (1)
- University of Southern Philippines Foundation. College of Engineering and ArchitectureDocument12 pagesUniversity of Southern Philippines Foundation. College of Engineering and ArchitectureJason OwiaNo ratings yet
- Motor of Pump HandbookDocument252 pagesMotor of Pump Handbookhithr1No ratings yet
- Motor Sizing Calculations: Selection ProcedureDocument9 pagesMotor Sizing Calculations: Selection Procedurearunkumar100% (1)
- Motors Motor SelectionDocument166 pagesMotors Motor SelectionAragaw MuluNo ratings yet
- Torque Speed Curve of Induction MotorDocument5 pagesTorque Speed Curve of Induction MotorShri KulkarniNo ratings yet
- Variable Speed Drive - IntroductionDocument6 pagesVariable Speed Drive - Introductionawhk2006No ratings yet
- PDFDocument56 pagesPDFSobhy GendykhelaNo ratings yet
- U. C. Jindal - Machine Design-Pearson Education India (2013)Document872 pagesU. C. Jindal - Machine Design-Pearson Education India (2013)otromaasNo ratings yet
- Mechanical Power TransmissionDocument26 pagesMechanical Power TransmissionVinoth KumarNo ratings yet
- Steel Products and Structural Shapes - OptDocument12 pagesSteel Products and Structural Shapes - OptmurdicksNo ratings yet
- 215 Sample ChapterDocument23 pages215 Sample ChapterSreekumar RajendrababuNo ratings yet
- Precision Miniature Lead Screw Assemblies: 1st EditionDocument36 pagesPrecision Miniature Lead Screw Assemblies: 1st Editionarunurs1No ratings yet
- Cutler Hammer - A - Power Distribution System DesignDocument70 pagesCutler Hammer - A - Power Distribution System Designogkennyhobo100% (1)
- SWG To Square MM Conversion (Cable)Document3 pagesSWG To Square MM Conversion (Cable)jay shahNo ratings yet
- Drive Wheel Motor Torque CalculationsDocument2 pagesDrive Wheel Motor Torque CalculationsMani MaranNo ratings yet
- 4 Types of DC Motors and Their CharacteristicsDocument5 pages4 Types of DC Motors and Their CharacteristicsNuno HenriquesNo ratings yet
- Gep 974GDocument43 pagesGep 974GalbrodzNo ratings yet
- Accumulator TensionDocument4 pagesAccumulator TensionMostafa MehrjerdiNo ratings yet
- Motor HP Calculations 1Document1 pageMotor HP Calculations 1Hoang TruongNo ratings yet
- Maf and Torque Curve Motor Pages From EP3200E-2Document3 pagesMaf and Torque Curve Motor Pages From EP3200E-2Mohamed Salah El-FielNo ratings yet
- Wall Mounted H-Type Jib Crane DesignDocument65 pagesWall Mounted H-Type Jib Crane DesignFitra VertikalNo ratings yet
- NEMA & General Purpose Controls IC14 - Sect09Document186 pagesNEMA & General Purpose Controls IC14 - Sect094685752No ratings yet
- Motion Control Basics PDFDocument8 pagesMotion Control Basics PDFFouad ElhajjiNo ratings yet
- Ch4 Belt Drives-2Document40 pagesCh4 Belt Drives-2Abaziz Mousa OutlawZzNo ratings yet
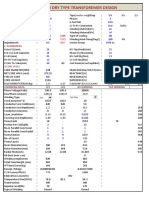
- Cast Resin Dry Type Transformer DesignDocument1 pageCast Resin Dry Type Transformer DesignAnonymous sAmJfcV100% (1)
- Hoist CrabDocument4 pagesHoist Crabwholenumber100% (1)
- Heating Coil DesignDocument6 pagesHeating Coil DesignSudip Mondal0% (1)
- Basic Technical Winch InformationDocument7 pagesBasic Technical Winch InformationMarcos GonzalezNo ratings yet
- AC Motor and Drive Theory Course Sept16Document91 pagesAC Motor and Drive Theory Course Sept16MIGUEL PEÑANo ratings yet
- Name: Aarsh Trivedi Roll No: 16BME176D Sub: MD 2 Case Study Topic: Worm GearDocument40 pagesName: Aarsh Trivedi Roll No: 16BME176D Sub: MD 2 Case Study Topic: Worm GearVirajNo ratings yet
- Selection PaP1 1Document32 pagesSelection PaP1 1RofochoNo ratings yet
- Oriental Motor Motor Sizing CalculationsDocument10 pagesOriental Motor Motor Sizing CalculationsKha VeenNo ratings yet
- MINAS BLinfomationDocument7 pagesMINAS BLinfomationmashudi_fikriNo ratings yet
- Engineering Reference: Sizing and Selection of Exlar Linear and Rotary ActuatorsDocument8 pagesEngineering Reference: Sizing and Selection of Exlar Linear and Rotary ActuatorsJelena BauerNo ratings yet
- Process of Selection and Example of SelectionDocument8 pagesProcess of Selection and Example of Selectionarvi_vinNo ratings yet
- An Serv 002 PDFDocument20 pagesAn Serv 002 PDFMario TapiaNo ratings yet
- Motor Specifications and Ratings Mhma: 500W To 1.5kW High Inertia, Medium CapacityDocument6 pagesMotor Specifications and Ratings Mhma: 500W To 1.5kW High Inertia, Medium CapacitynvkjayanthNo ratings yet
- Torque Sensors: Common Sensing MethodsDocument32 pagesTorque Sensors: Common Sensing MethodsvishiwizardNo ratings yet
- Motor Selection CalculatorDocument5 pagesMotor Selection Calculatorjay100% (5)
- SW/SP/SH Series: Soul of Special AutomationDocument20 pagesSW/SP/SH Series: Soul of Special AutomationelecompinnNo ratings yet
- CalculationDocument14 pagesCalculationLipika KanojiaNo ratings yet
- Usa Tech Calculation PDFDocument35 pagesUsa Tech Calculation PDFRizwan HameedNo ratings yet
- Gear CB 98 105Document8 pagesGear CB 98 105666667No ratings yet
- Starting time calculationDocument15 pagesStarting time calculationSankalp MittalNo ratings yet
- Norgren Excelon® Modular Series Ultraire Oil Vapour Removal 74Document4 pagesNorgren Excelon® Modular Series Ultraire Oil Vapour Removal 74Iswar Rauf Aboo 'AqilahNo ratings yet
- GD2 CalculationDocument1 pageGD2 CalculationbahramhooNo ratings yet
- Application Letter - Taufiq Rachman (1) 1Document1 pageApplication Letter - Taufiq Rachman (1) 1Iswar Rauf Aboo 'AqilahNo ratings yet
- Ansi b36.10 Pipe SizeDocument9 pagesAnsi b36.10 Pipe SizeSpoonful BurnsideNo ratings yet
- Dysl-Quo20150916a (Submersible Sewage Pump)Document1 pageDysl-Quo20150916a (Submersible Sewage Pump)Iswar Rauf Aboo 'AqilahNo ratings yet
- Sea-Dog - Quality Marine, Industrial and Rigging HardwareDocument1 pageSea-Dog - Quality Marine, Industrial and Rigging HardwareIswar Rauf Aboo 'AqilahNo ratings yet
- EDS Sanitary Water Pump 15-9-2015Document80 pagesEDS Sanitary Water Pump 15-9-2015Iswar Rauf Aboo 'AqilahNo ratings yet
- Software ListDocument1 pageSoftware ListIswar Rauf Aboo 'AqilahNo ratings yet
- Lion Air eTicket Itinerary Receipt CGK-PLM-CGKDocument2 pagesLion Air eTicket Itinerary Receipt CGK-PLM-CGKTirta BudiawanNo ratings yet
- Catalogue of SteelDocument4 pagesCatalogue of SteelIswar Rauf Aboo 'AqilahNo ratings yet
- Hydrometallurgical Route for Processing Nickel Laterite Ore into Ferronickel AlloyDocument14 pagesHydrometallurgical Route for Processing Nickel Laterite Ore into Ferronickel AlloyIswar Rauf Aboo 'AqilahNo ratings yet
- How To Use The TabStrip Control in A UserFormDocument3 pagesHow To Use The TabStrip Control in A UserFormIswar Rauf Aboo 'AqilahNo ratings yet
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionFrom EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionRating: 4.5 out of 5 stars4.5/5 (542)
- Off-Grid Projects: Step-by-Step Guide to Building Your Own Off-Grid SystemFrom EverandOff-Grid Projects: Step-by-Step Guide to Building Your Own Off-Grid SystemNo ratings yet
- 8051 Microcontroller: An Applications Based IntroductionFrom Everand8051 Microcontroller: An Applications Based IntroductionRating: 5 out of 5 stars5/5 (6)
- Practical Electrical Wiring: Residential, Farm, Commercial, and IndustrialFrom EverandPractical Electrical Wiring: Residential, Farm, Commercial, and IndustrialRating: 3.5 out of 5 stars3.5/5 (3)
- Practical Troubleshooting of Electrical Equipment and Control CircuitsFrom EverandPractical Troubleshooting of Electrical Equipment and Control CircuitsRating: 4 out of 5 stars4/5 (5)
- Upcycled Technology: Clever Projects You Can Do With Your Discarded Tech (Tech gift)From EverandUpcycled Technology: Clever Projects You Can Do With Your Discarded Tech (Tech gift)Rating: 4.5 out of 5 stars4.5/5 (2)
- 2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersFrom Everand2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersRating: 5 out of 5 stars5/5 (1)
- Practical Electronics for Inventors, Fourth EditionFrom EverandPractical Electronics for Inventors, Fourth EditionRating: 4 out of 5 stars4/5 (3)
- Ramblings of a Mad Scientist: 100 Ideas for a Stranger TomorrowFrom EverandRamblings of a Mad Scientist: 100 Ideas for a Stranger TomorrowNo ratings yet
- Lithium-Ion Battery: The Power of Electric Vehicles with Basics, Design, Charging technology & Battery Management SystemsFrom EverandLithium-Ion Battery: The Power of Electric Vehicles with Basics, Design, Charging technology & Battery Management SystemsRating: 5 out of 5 stars5/5 (2)
- The Fast Track to Your Technician Class Ham Radio License: For Exams July 1, 2022 - June 30, 2026From EverandThe Fast Track to Your Technician Class Ham Radio License: For Exams July 1, 2022 - June 30, 2026Rating: 5 out of 5 stars5/5 (1)
- Programming the Raspberry Pi, Third Edition: Getting Started with PythonFrom EverandProgramming the Raspberry Pi, Third Edition: Getting Started with PythonRating: 5 out of 5 stars5/5 (2)
- The Phone Fix: The Brain-Focused Guide to Building Healthy Digital Habits and Breaking Bad OnesFrom EverandThe Phone Fix: The Brain-Focused Guide to Building Healthy Digital Habits and Breaking Bad OnesRating: 5 out of 5 stars5/5 (1)
- The Rare Metals War: the dark side of clean energy and digital technologiesFrom EverandThe Rare Metals War: the dark side of clean energy and digital technologiesRating: 5 out of 5 stars5/5 (2)
- Conquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeFrom EverandConquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeRating: 5 out of 5 stars5/5 (8)
- Current Interruption Transients CalculationFrom EverandCurrent Interruption Transients CalculationRating: 4 out of 5 stars4/5 (1)
- The Graphene Revolution: The Weird Science of the Ultra-thinFrom EverandThe Graphene Revolution: The Weird Science of the Ultra-thinRating: 4.5 out of 5 stars4.5/5 (4)
- High Performance Loudspeakers: Optimising High Fidelity Loudspeaker SystemsFrom EverandHigh Performance Loudspeakers: Optimising High Fidelity Loudspeaker SystemsRating: 4 out of 5 stars4/5 (1)
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionFrom EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionRating: 4 out of 5 stars4/5 (331)
- Understanding Automotive Electronics: An Engineering PerspectiveFrom EverandUnderstanding Automotive Electronics: An Engineering PerspectiveRating: 3.5 out of 5 stars3.5/5 (16)