You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5814)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (844)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- M&E Guide IDocument12 pagesM&E Guide IGael CruzNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- WaveguideDocument32 pagesWaveguideBeverly Paman100% (2)
- Just Ones and ZeroesDocument4 pagesJust Ones and Zeroesarturo53No ratings yet
- m4345x Laserjet MFP BW Laser PDFDocument36 pagesm4345x Laserjet MFP BW Laser PDFarturo53No ratings yet
- RezosDocument7 pagesRezosarturo53No ratings yet
- Esu's Divine ConceptDocument17 pagesEsu's Divine Conceptarturo53No ratings yet
- WinForms GaugesDocument1,465 pagesWinForms Gaugesarturo53No ratings yet
- LED Lighting GuideDocument24 pagesLED Lighting Guidearturo53100% (1)
- UntitledDocument84 pagesUntitledarturo53No ratings yet
- 00670b ASCII ConvDocument10 pages00670b ASCII Convarturo53No ratings yet
- Introduction To Utility Metering Tutorial: © 2005 Microchip Technology Inc. DS39757ADocument46 pagesIntroduction To Utility Metering Tutorial: © 2005 Microchip Technology Inc. DS39757Aarturo53No ratings yet
- Hih 4000Document6 pagesHih 4000arturo53No ratings yet
- Simulator For ArduinoDocument32 pagesSimulator For Arduinoarturo53No ratings yet
- Ahumi RelDocument14 pagesAhumi Relarturo53No ratings yet
- Selecting The Ideal Temperature Sensor: Microchip Technology Inc. Webseminar: August 25Th, 2004Document23 pagesSelecting The Ideal Temperature Sensor: Microchip Technology Inc. Webseminar: August 25Th, 2004arturo53No ratings yet
- Maxim Thermal HandbookDocument89 pagesMaxim Thermal Handbookarturo53No ratings yet
- 00220awatt MeterDocument96 pages00220awatt Meterarturo53No ratings yet
- Analog Interface Guide IDocument32 pagesAnalog Interface Guide Iarturo53No ratings yet
- XTR115Document11 pagesXTR115arturo53No ratings yet
- 18f14k22 ProgrammingDocument36 pages18f14k22 Programmingarturo53No ratings yet
- XH10P 20P DatasheetDocument1 pageXH10P 20P Datasheetluthfie4uNo ratings yet
- Manual HusqvarnaDocument52 pagesManual HusqvarnaJoão Carlos OliveiraNo ratings yet
- Chapter 2 AC To DC Converters: OutlineDocument84 pagesChapter 2 AC To DC Converters: OutlinePraveen KumarNo ratings yet
- STPM Physics Chapter 12 ElectrostaticsDocument1 pageSTPM Physics Chapter 12 ElectrostaticsChris Lau100% (3)
- Questions 4 1Document95 pagesQuestions 4 1Anik PaulNo ratings yet
- Microwave Filter Design Chp. 5: End-Coupled, Half-Wavelength Resonator FiltersDocument37 pagesMicrowave Filter Design Chp. 5: End-Coupled, Half-Wavelength Resonator FiltersyyryNo ratings yet
- 3 PRO-1250 Series User ManualDocument10 pages3 PRO-1250 Series User ManualGary854545No ratings yet
- Multifunction Relay Platform Protection Relay & IED: Product OverviewDocument2 pagesMultifunction Relay Platform Protection Relay & IED: Product OverviewRavin PalNo ratings yet
- Multi Phase Star RectifierDocument8 pagesMulti Phase Star Rectifierahmad16_ftua6999No ratings yet
- Thermal and Electrical Conductivity of MetalsDocument4 pagesThermal and Electrical Conductivity of MetalsNani Neijie50% (2)
- Automotive DiagramDocument3 pagesAutomotive DiagramJerec NaturalNo ratings yet
- Cargador 950k Kenr5783kenr5783-02 - SisDocument20 pagesCargador 950k Kenr5783kenr5783-02 - Sisjaimitooo100% (2)
- PN Junction DiodeDocument50 pagesPN Junction DiodeMayank Agarwal100% (2)
- Advanced MultisimDocument146 pagesAdvanced MultisimHec Itou75% (4)
- S4L1D-D41 Wdg.311 - Technical Data Sheet - StamfordDocument10 pagesS4L1D-D41 Wdg.311 - Technical Data Sheet - Stamfordscribbles_buddyNo ratings yet
- LVC Price Schedule Wef 15th July 2021Document145 pagesLVC Price Schedule Wef 15th July 2021Kushal DixitNo ratings yet
- Low Leakage Fully Half - Select - Free Robust SRAM Cells With BTI Reliability AnalysisDocument12 pagesLow Leakage Fully Half - Select - Free Robust SRAM Cells With BTI Reliability AnalysisShabbirNo ratings yet
- t19c301 SeriesDocument101 pagest19c301 SeriesOSWALDO ROSALESNo ratings yet
- 4414-6 Core 18 AWG Shielded Multi Conductor CableDocument1 page4414-6 Core 18 AWG Shielded Multi Conductor CableSriparthanNo ratings yet
- HDSM USB Instruction ManualDocument20 pagesHDSM USB Instruction Manualkg413No ratings yet
- InterferenceDocument35 pagesInterferenceAbdullah OmarNo ratings yet
- Manual For Fluke 438Document18 pagesManual For Fluke 438Main hoon LaHorE -LaHoreEeE Fun & FactsNo ratings yet
- 18 MM Diameter: Inductive NAMUR SensorsDocument2 pages18 MM Diameter: Inductive NAMUR SensorsEd CalheNo ratings yet
- Build Your Own Electric CarDocument2 pagesBuild Your Own Electric Caroffgrid1No ratings yet
- A320 Electrical System Chap-24Document32 pagesA320 Electrical System Chap-24JP ZemogNo ratings yet
- Infineon ICE3BR2565JF DS v02 01 enDocument36 pagesInfineon ICE3BR2565JF DS v02 01 ensamacda1000No ratings yet
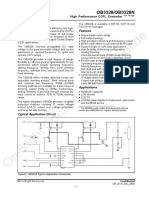
- On-Bright Confidential To Bonafide: OB3328/OB3328NDocument14 pagesOn-Bright Confidential To Bonafide: OB3328/OB3328NHamza Abbasi AbbasiNo ratings yet