International Journal of Computer Engineering and Technology (IJCET), ISSN 0976INTERNATIONAL JOURNAL OF COMPUTER ENGINEERING & 6367(Print), ISSN
0976 - 6375(Online), Volume 5, Issue 1, January (2014), IAEME
TECHNOLOGY (IJCET)
ISSN 0976 6367(Print) ISSN 0976 6375(Online) Volume 5, Issue 1, January (2014), pp. 52-61 IAEME: www.iaeme.com/ijcet.asp Journal Impact Factor (2013): 6.1302 (Calculated by GISI) www.jifactor.com
IJCET
IAEME
A NOVEL METHOD FOR CLUMPED PARTICLES SEPARATION IN MICROSCOPIC IMAGES
A. AL-Marakeby Systems and Computers Engineering Dept., Faculty of Engineering, Al-AzharUniversity, Cairo, Egypt
ABSTRACT Microscopic image processing has been recently applied to many fields such as blood cell counting, tissue analysis and material microstructures analysis. Cell counting is an important process which helps the diagnosis of many diseases. A main problem in cell counting and also in other microscopic image analysis is the overlap between objects. This overlap and connection between particles reduces the accuracy of counting or gives classifications errors. Many techniques have been used to isolate the objects but the segmentation process still has many errors. In this research,a novel method for separation of clumped particle is developed. This method depends on iterative hypothesis and verification technique. Extracted features are used to generate a set of hypotheses, depending on particles boundary and colors. These hypotheses are verified using specific measures and distances, and then the best hypothesis is chosen. This method is efficient for generic shape analysis and matchinginstead of the assumption of circular or elliptical particles shapes.In addition to that, the proposed technique overcomes the problems of noisy and cut boundary, and the problems of computational complexity in some other techniques. This method is compared to circle and ellipse detection methods and higher accuracy is achieved. Keywords: Particles Separation- Segmentation-Microscopic Images Blood Cell Counting. 1. INTRODUCTION Segmentation is very important stage for most successful image processing and computer vision applications. The errors in the segmentation are diffused to the next stages and cause the low performance of the final results. Microscopic image processing is a field concerns with the analysis and processing of images obtained from a microscope. Microstructures analysis of material, complete blood count (CBC), and tissue analysis are some examples from many applications of microscopic image processing. The automation of blood cells counting has the advantages of
52
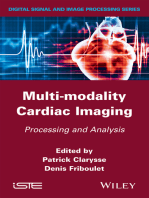
International Journal of Computer Engineering and Technology (IJCET), ISSN 09766367(Print), ISSN 0976 - 6375(Online), Volume 5, Issue 1, January (2014), IAEME reducing costs and increasing speed and precision. The correct segmentation of blood cells represents a challenge when the cells are overlapped. Connected component analysis is a simple technique used to detect cells, but it gives correct results only when the cells are far and separated from each other's. Fig.1 shows some of connected cells which are in interpreted as a single cell. Venkatalakshmi et.al. used Hough transform to detect and count red blood cell[13]. Hough Transform has better performance than connected component analysis but still suffer from many problems. Cell shape can be non-circular , and some overlaps structures are difficultto be detected by Hough transform.
Fig.1 Overlapped Cells Sharif et. al. used masking and watershed algorithm to segment RBC[6]. Huang used watershed segmentation combined with morphological operators to separate overlapping blood cells[5]. Theerapattanakul et al. used active contours for the segmentation process of blood cells[7]. Other techniques based on SVM, neural networks, and Gabor filter, can be found in [8][9][11][14].In this research a novel method is developed which solves many problems found in other techniques. This method depends on iterative hypothesis and verification technique. Extracted features are used to generate a set of hypotheses, depending on particles boundary and colors. These hypotheses are verified using specific measures and distances, and then the best hypothesis is chosen. This method is efficient for generic shape analysis and matchinginstead of the assumption of circular or elliptical particles shapes. This paper is organized as follow: section 2 explains the circle and ellipse detection, section 3 explains the proposed technique working with generic shape detection, section 4 illustrates the color model used in the separation process , section 5 gives the results and discussions, and finally section 6 gives the conclusion. 2. CIRCLE AND ELLIPSE DETECTION An edge detection stage is required before running the shape detection algorithms. Edge detection converts the color or gray image into binary image, where the boundaries of objects are detected. There are many edge detection algorithms such as Sobel, Prewitt, Roberts and Laplacain, Canny edge detection. In this research Sobel edge detection is used as shown in fig.2.Compared to other edge operator, Sobel has two main advantages: 1- Since the introduction of the average factor,it has some smoothing effect to the random noise of the image. 2-Because it is the differential of two rows or two columns, so the elements of the edge on both sides has been enhanced,so that the edge seems thick and bright[15].
53
International Journal of Computer Engineering and Technology (IJCET), ISSN 09766367(Print), ISSN 0976 - 6375(Online), Volume 5, Issue 1, January (2014), IAEME
Fig. 2 Sobel edge detection From many circle and ellipse detection techniques, Hough Transform (HT) is used to detect particles. The main advantage of the HT in extracting circle and ellipse, is its robustness against discontinuous or missing data points. This is becausethe HT does not require the connectivity of all the contour pointsof circle or ellipse [1]. 2.1 Circle detection HT converts features points in the 2Dimage into parameter space. HT for circle detection depends on the detection of 3 parameters: the circle center coordinates a,b and the radius r. The circle equation is given by: This equation can be represented in parametric space as: x = a + r * cos(), y = b + r*sin() (2) (1)
The main problem with HT for circle detection is the computational complexity and memory requirements. Many techniques are used to reduce the complexity and memory requirements of HT. Randomized Hough Transform (RHT)keeps standard Hough Transform (SHT)'s robustness,but costs much less memory space and computing time than SHT.[4] [12]. RHT each time samples 3 edge points of the image randomly and calculates 3 parameters (center position and radius) of the circle to be detected instead of mapping all theedge points to parameter space in SHT [4].Gradient methods are used to restrict the center of the circle and also the radius to some value extract from the gradient of the curves. Xing et. al. used one-dimensional circle Hough transform depending on that the circle center is on the gradient line of circle edge points[16]. Fig.3 shows using HT to separate particles in microscopic images
Fig.3 Separation of particles based on HT circle detection.
54
International Journal of Computer Engineering and Technology (IJCET), ISSN 09766367(Print), ISSN 0976 - 6375(Online), Volume 5, Issue 1, January (2014), IAEME 2.2 Ellipse detection Ellipse is a more general shape model than circle model. For this system many particles have elongated shapes which make the circle HT is not accurate. The problems in circle detections are increased when moving to ellipse detection. While circle detection depends on 3 parameters, ellipse detection has 5 parameters. Fig.4 shows the different parameters required for specifying an ellipse. These parameters are the center of the ellipse, the major axes, the minor axes and the angle of the ellipse with X axes. The following equation represents the parametric equation of the ellipse: (3) Evidently this approach would require solving the equation for five different pointson the ellipse, thus mapping xy points to a five dimensional space, (hence having to manage a fivedimensional accumulator). This approach is not only memory expensive but also computationally intensive, asthe algorithm in its brute search form would have complexity[2]. As in circle detection, many algorithms are used also in ellipse detection to reduce its complexity. Randomized Hough Transform (RHT) is used in ellipse detection, where an n-tuple ofpixels in the image is mapped to a single point in the parameterspace[10].Han et al. simplified ellipse detection by dividing the image into several sub-images by the properties of ellipse, andthen point pairs are chosen from the sub-images to calculate the parameters of ellipses[3]. Alex et al. considered every pair of edge pixels as possible end points of the major axis of a hypothetical ellipse. After that, all other edge pixels will be used to vote on the half-length of the minor axis of this hypothetical ellipse[1]. Fig.5 illustrates the separation of particles using HT for ellipse detection.
L2 O L1
Fig.4 ellipse parameters
Fig.5 Separation of particles based on HT ellipse detection. 3. GENERIC SHAPE DETECTION SYSTEM The circular and elliptical assumption for particles shapes is not valid for all particles. Many particles have deformed shapes especially when they are touched or connected with other particles.These non-circular and non-elliptical shapes reduce the accumulator value for this object. Object detection depends on thresholding the accumulator values where value less than kis not considered as an object.Hence, to detect these objects, a threshold for parameter space should be
55
International Journal of Computer Engineering and Technology (IJCET), ISSN 09766367(Print), ISSN 0976 - 6375(Online), Volume 5, Issue 1, January (2014), IAEME decreased, causing the detection of false objects. Fig.6 shows these problems where the shapes of the particles are not exactly fit to the ellipse or circle assumption.
Fig.6 non-circular and non-elliptical shapes The technique used in this research depends on generic shape analysis and matching. The boundaries of these shapes are extracted from different images and stored in a database. The distances between the particle under inspection and all shapes in the database are measured. An iteration process starts with the generation of assumptions and verification of these assumptions. The assumptions covers different shapes exists in the database, different dimensions and coordinates, and the overlap of particles (single particle, two particles, three particles .etc). The verification of assumptions depends on an evaluation function which has terms for many factors. 3.1 Boundary Extractionand Shapes database Many shape descriptors exists such as Fourier descriptors, wavelet descriptors, signatures, moments,etc. Most of these descriptors depend on the closed contours. Noisy contours with cut regions or concatenated objects cause problems for these techniques. In other words the Fourier descriptor of a special boundary is completely different with the Fourier descriptor of the half of this boundary. Hence, in this research the spatial domain is better and easier in working with it. We can conclude that this shape consists of two concatenated particles by a simple analysis. The boundaries of different particles with different shapes are extracted as shown in fig.7. The shapes are selected to avoid similar shapes. These boundaries are stored in a database. The database contains the full resolution boundaries and different resolutions or modified boundaries can be obtained after that by sampling or filters.
Fig.7 boundary extraction
56
International Journal of Computer Engineering and Technology (IJCET), ISSN 09766367(Print), ISSN 0976 - 6375(Online), Volume 5, Issue 1, January (2014), IAEME 3.2 Boundary Distance The distance measure between the boundary of the particle under inspection and a stored template in the database is important for obtaining good performance. The small value of this value indicates better interpretation and robust results. The large value indicates unknown or uncertain interpretation and hence increases segmentation and analysis errors. The distance between template and boundary is measured by the summation of all distance from each point in the boundary to the template. The template is approximated by a set of line segments. Each segment linear equation is extracted and the distance between a point and a line is given by equation 4. The solid line in fig.8 represents the template while the dotted line represents the boundary of the particle.
||
(4)
Fig.8 boundary distance 3.3 Hypothesize-and-test framework A process of generating assumptions and testing if these assumptions are valid or not, is used to separate the particles and determine the location, shape, and dimensions of these particles. The search space of this process is very large and many techniques are used to find the solution efficiently with high accuracy. The search space include finding the overlap type (no overlap two particle three -.etc), the location of centers and the shape of particles. After each assumption generation the verification process is applied and the distance is measured as discussed in the previous section. To reduce the search space with affecting the accuracy, the boundary color analysis, gradient analysis, and maximum curvature analysis are used. Color Analysis is detailed and illustrated in section 4. The gradient analysis of the boundary is very important and reduces the search space too much. The center of the particle is deduced from the curvature of the boundary, and hence no need to test other assumptions. The center may be not accurate but searching around the determined location gives very accurate results. The maximum curvature analysis detects some points which are candidate to be the connection of two or more particles. Some noise and deviated boundaries may generate false points but the verification stage will discard any false assumptions. Fig. 9 illustrates the assumption generation for one and two particles. Fig.10 shows the maximum curvature points (blue dots).
57
International Journal of Computer Engineering and Technology (IJCET), ISSN 09766367(Print), ISSN 0976 - 6375(Online), Volume 5, Issue 1, January (2014), IAEME
Fig.9 assumptions and verifications
Fig.10 maximum curvature points (blue dots) The verification stage depends on many factors. The main factor is the boundary distance discussed in section 3.2. This distance has a clear discrimination between single or multiple particles. The other factors used in generating hypotheses are used again to measure and verify the assumption. The color model and the maximum curvature points are used but with a smaller weight while these factors are not dominant and may give false results. Some other heuristics are used to accelerate the process of hypotheses generation and also in the verification of these assumptions. Fig.11 shows the segmentation of three clumped particles.
Fig. 11 segmentation of three overlapped particles
58
International Journal of Computer Engineering and Technology (IJCET), ISSN 09766367(Print), ISSN 0976 - 6375(Online), Volume 5, Issue 1, January (2014), IAEME 4. COLOR MODEL Working with edges and boundaries only, discards a lot of useful information which can be important for solving the overlap problem. The particles color model has a significant impact on the performance of the system. As shown in fig.6 the color and intensity are varied overthe area of the particles. A light spot can be found near the center of the particle, and a dark region exists at the overlapping area. In Fig.12the color analysis for blood cell image is illustrated.
Figure 12: Color and intensity variations over particles This analysis is based on different thresholds for colors and each level or cluster is assigned a specific color. The result shows that two connected particles has two spots while each single particle has a unique spot. This analysis is not usually true and it is used for generating hypotheses. The iterative process for hypothesize and test can verify or discard the assumptions generated by the color model as discussed in section 3. 5. RESULTS AND DISCUSSIONS A set of blood cell images is used to test the developed system [17]. Four techniques are used: 1- connected component analysis, HT for circles, HT for ellipse, and the generic shape detection discussed in section 3. Table.1 reports the accuracies of these techniques. Table.1 Accuracy of different techniques for counting blood cells Technique Accuracy Connected component Analysis Hough Transform for circle detection Hough Transform for Ellipse detection Generic Shape 88% 92% 94% 98%
The connected component analysis has no separation at all, so any clumped particles are interpreted as a single particle. HT for circle can separate particles but it is restricted to the circular shapes and sometimes generates false object detection. The HT elliptical system is similar to circle detection but with more generalization to elliptical shapes. The proposed technique of generic shape detection system has many improvements and robustness. It can detect more shapes, deals with noise and cut boundary, and has higher accuracy.
59
International Journal of Computer Engineering and Technology (IJCET), ISSN 09766367(Print), ISSN 0976 - 6375(Online), Volume 5, Issue 1, January (2014), IAEME 6. CONCLUSION Separation of clumped particles represents a problem for obtaining better results for microscopic image analysis. The assumption of particles shapes to be standard shapes such as circles and ellipses is not valid assumption and causes errors and reduced performance. The proposed technique in this research has better performance and deals with different shapes effectively. Using color information to separate overlapped particles increases the accuracy and improves the performance. The hypothesize and test framework used in this research reduces the search space based on bottom up features interpretation and some other heuristics. REFERENCES [1] Alex Yong, Sang Chia, Maylor K. H. Leung, How-Lung Eng, SusantoRahardja, ELLIPSE DETECTION WITH HOUGH TRANSFORM IN ONE DIMENSIONAL PARAMETRIC SPACE. IEEE International Conference on Image Processing, 2007. Cosmin A. Basca, MihaiTalos, and Remus Brad, Randomized Hough Transform for Ellipse Detection with Result Clustering, Serbia & Montenegro, Belgrade, November 22-24, 2005. Han Fei, GuoYanling, Wang Lili, A New Ellipse Detector Based on Hough Transform, Second International Conference on Information and Computing Science2009. Huadong Sun, Yaobin Mao, Ningjian Yang, Dian Zhu,A Real-Time and Robust Multi-Circle Detection Method Based on Randomized Hough Transform, International Conference on Computer Science and Information Processing (CSIP) 2012. HUANG Jiandeng, An Improved Algorithm of Overlapping Cell Division, International Conference on Intelligent Computing and Integrated Systems (ICISS), 2010 J. M. Sharif, M. F. Miswan, M. A. Ngadi, MdSahHj, Salam, MuhammadMahadi bin Abdul Jamil,Red Blood Cell Segmentation Using Masking and Watershed Algorithm: A Preliminary Study,2012 International Conference on Biomedical Engineering (ICoBE), 2012, J. Theerapattanakul, J. Plodpai, C. Pintavirooj, AN EFFICIENT METHOD FOR SEGMENTATION STEP OF AUTOMATED WHITE BLOOD CELL CLASSIFICATIONS,. IEEE Conference TENCON 2004. JiyeQian, Bin Fang, Chunyan Li and Lin Chen, Coarse-to-Fine Particle Segmentation in Microscopic Urinary Images, 3rd International Conference onBioinformatics and Biomedical Engineering , 2009. Nasution, AMT, EK Sury`aningtyas, Comparison of Red Blood Cells Counting using two Algorithms: Connected Component Labeling and Back projection of Artificial Neural Network, IEEE IPGC 2008. Robert A.McLaughlin, Randomized Hough Transform: Better Ellipse Detection , IEEE TENCON - Digital Signal Processing Applications, 1996 R. Safabakhsh, F. Zamani,A Robust Multi-Orientation Gabor Based System for Discriminating Touching White and Red Cells in Microscopic Blood Image, Information and Communication Technologies, 2006. SI-YU GUO, XU-FANG ZHANG, FAN ZHANG, ADAPTIVE RANDOMIZED HOUGH TRANSFORM FOR CIRCLE DETECTION USING MOVING WINDOW, Proceedings of the Fifth International Conference on Machine Learning and Cybernetics, Dalian, 13-16 August 2006 Venkatalakshmi.B1, Thilagavathi.K, Automatic Red Blood Cell Counting Using Hough Transform, Proceedings of 2013 IEEE Conference on Information and Communication Technologies 2013.
[2] [3] [4]
[5] [6]
[7]
[8]
[9]
[10] [11]
[12]
[13]
60
International Journal of Computer Engineering and Technology (IJCET), ISSN 09766367(Print), ISSN 0976 - 6375(Online), Volume 5, Issue 1, January (2014), IAEME [14] Wei-Liang Tai1, Rouh-Mei Hu2,5, Han C.W. Hsiao, Rong-Ming Chen, and Jeffrey J. P. Tsai, Blood Cell Image Classification Based on Hierarchical SVM, IEEE International Symposium on Multimedia, 2011. [15] WenshuoGao, Lei Yang, An Improved Sobel Edge Detection, 3rd IEEE International Conference on Computer Science and Information Technology (ICCSIT), 2010 [16] Xing Chen, Ling Lu, Yang Gao, A New Concentric Circle Detection Method Based onHough Transform, The 7th International Conference on Computer Science & Education (ICCSE) 2012. [17] http://library.med.utah.edu/ (2013).
61
You might also like
- Bifurcation Structures For Retinal Image Registration & Vessel ExtractionDocument7 pagesBifurcation Structures For Retinal Image Registration & Vessel ExtractionresearchinventyNo ratings yet
- Effective Brain Segmentation Method Based On MR Physics Image ProcessingDocument14 pagesEffective Brain Segmentation Method Based On MR Physics Image ProcessingAnonymous lt2LFZHNo ratings yet
- Automated Scoring of A Neuropsychological Test - Rey OsteriethDocument8 pagesAutomated Scoring of A Neuropsychological Test - Rey OsteriethAnonymous KgUtPlkj0% (1)
- Ijcsit 050304Document21 pagesIjcsit 050304Anonymous Gl4IRRjzNNo ratings yet
- Retinal ImagesDocument5 pagesRetinal ImagesJournalNX - a Multidisciplinary Peer Reviewed JournalNo ratings yet
- Automatic Vessel Extraction With Combined Bottom Hat and Match FilterDocument5 pagesAutomatic Vessel Extraction With Combined Bottom Hat and Match FilterBahareh Bozorg ChamiNo ratings yet
- Optic Disc Segmentation Based On Independent Component Analysis and K-Means ClusteringDocument6 pagesOptic Disc Segmentation Based On Independent Component Analysis and K-Means ClusteringInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Detection of Tumour in 3D Brain Image Using Mri Mining TechniquesDocument6 pagesDetection of Tumour in 3D Brain Image Using Mri Mining TechniquesJeevan KishorNo ratings yet
- Extraction of Coronary Vessel Structures in Low Quality X-Ray Angiogram Images Cemal Köse, Cevat İkibaşDocument4 pagesExtraction of Coronary Vessel Structures in Low Quality X-Ray Angiogram Images Cemal Köse, Cevat İkibaşvanessagirondaNo ratings yet
- Recognition and Counting of Wbcs Using Wavelet TransformDocument5 pagesRecognition and Counting of Wbcs Using Wavelet TransformInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Intelligent Image Processing System For Detection and Segmentation of Regions of Interest in Retinal ImagesDocument26 pagesIntelligent Image Processing System For Detection and Segmentation of Regions of Interest in Retinal ImagesMohammed Idrees IdreesNo ratings yet
- Retina Blood Vessel SegmentationDocument28 pagesRetina Blood Vessel SegmentationRevati WableNo ratings yet
- Active Fingerprint Ridge Orientation ModDocument10 pagesActive Fingerprint Ridge Orientation ModKeshav PayikNo ratings yet
- Optic Disc Segmentation Based On Watershed TransformDocument5 pagesOptic Disc Segmentation Based On Watershed TransformkusnadiNo ratings yet
- Symmetry 10 00589 PDFDocument25 pagesSymmetry 10 00589 PDFDewi RahmawatiNo ratings yet
- Novel Fuzzy Association Rule Image Mining Algorithm For Medical Decision Support SystemDocument8 pagesNovel Fuzzy Association Rule Image Mining Algorithm For Medical Decision Support SystemBudi Dwi SatotoNo ratings yet
- To Propose An Improvement in Zhang-Suen Algorithm For Image Thinning in Image ProcessingDocument8 pagesTo Propose An Improvement in Zhang-Suen Algorithm For Image Thinning in Image ProcessingIJSTENo ratings yet
- An Edge Detection Method For Hexagonal ImagesDocument13 pagesAn Edge Detection Method For Hexagonal ImagesAI Coordinator - CSC JournalsNo ratings yet
- Paper1 PDFDocument3 pagesPaper1 PDFHeranti Reza DamayantiNo ratings yet
- A K-Means Based Methodology For Evaluation of Shape Parameters For Nano-ParticlesDocument5 pagesA K-Means Based Methodology For Evaluation of Shape Parameters For Nano-ParticlesAshNo ratings yet
- Reeb Graph For Automatic 3D CephalometryDocument13 pagesReeb Graph For Automatic 3D CephalometryAI Coordinator - CSC JournalsNo ratings yet
- Research ArticleDocument21 pagesResearch ArticleDesi Irfan TanNo ratings yet
- Elbow Joint 3D Scan Info 2Document5 pagesElbow Joint 3D Scan Info 2Phi NguyenNo ratings yet
- Two-Stage Semi-Automatic Organ Segmentation Framework Using Radial Basis Functions and Level SetsDocument10 pagesTwo-Stage Semi-Automatic Organ Segmentation Framework Using Radial Basis Functions and Level Setsvenkeey2No ratings yet
- Edge Detection and Geometric Feature Extraction of A Burner's Jet in FNBZ Images Using Seeded Region Growing AlgorithmDocument5 pagesEdge Detection and Geometric Feature Extraction of A Burner's Jet in FNBZ Images Using Seeded Region Growing AlgorithmAnonymous PkeI8e84RsNo ratings yet
- Quantitative Analysis of Particles SegregationDocument7 pagesQuantitative Analysis of Particles SegregationMia AmaliaNo ratings yet
- Zone Theory Applied To Boost Recognition Rate of HMM Based SystemDocument7 pagesZone Theory Applied To Boost Recognition Rate of HMM Based SystemInternational Association of Scientific Innovations and Research (IASIR)No ratings yet
- Segmentation of Abdominal Organs On CT Images Using Distance Regularized Level Set Model - A Semi Automatic ApproachDocument5 pagesSegmentation of Abdominal Organs On CT Images Using Distance Regularized Level Set Model - A Semi Automatic ApproachInnovative Research PublicationsNo ratings yet
- Coin Recognition Using Circular Hough Transform: AbstractDocument4 pagesCoin Recognition Using Circular Hough Transform: AbstractPradika SetyaNo ratings yet
- A Comparative Analysis of Various Segmentation Techniques in Brain Tumor ImageDocument7 pagesA Comparative Analysis of Various Segmentation Techniques in Brain Tumor ImageInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Lung Area Extraction From X-Ray CT Images For Computer-Aided Diagnosis of Pulmonary Nodules by Using Active Contour ModelDocument10 pagesLung Area Extraction From X-Ray CT Images For Computer-Aided Diagnosis of Pulmonary Nodules by Using Active Contour ModelBara ProkNo ratings yet
- Segmentation of Brain MR Images Based On Finite Skew Gaussian Mixture Model With Fuzzy C-Means Clustering and EM AlgorithmDocument9 pagesSegmentation of Brain MR Images Based On Finite Skew Gaussian Mixture Model With Fuzzy C-Means Clustering and EM AlgorithmNuthangi MaheshNo ratings yet
- Skew Ray Tracing and Error Analysis of Optical Lens With Cylindrical Boundary Surface - Liao Te Ten, Chen Shih Hung, Chen Kuo Ying, Chen Chun TaDocument18 pagesSkew Ray Tracing and Error Analysis of Optical Lens With Cylindrical Boundary Surface - Liao Te Ten, Chen Shih Hung, Chen Kuo Ying, Chen Chun TaAlejandro Eduardo SeeMore MastrotuxNo ratings yet
- Vol4 Iss10!67!85 A CAD System For Automatic ClassifiDocument19 pagesVol4 Iss10!67!85 A CAD System For Automatic ClassifiAdil ShanNo ratings yet
- MODIFIED Synopsis of The Proposed ResearchDocument23 pagesMODIFIED Synopsis of The Proposed ResearchAshokupadhye1955No ratings yet
- Brain Tumor Detection Using Matlab: SynopsisDocument12 pagesBrain Tumor Detection Using Matlab: SynopsisSinny D Miracle ManoharNo ratings yet
- Thyroid Segmentation and Volume Estimation Using CT Images: I J I R S E TDocument6 pagesThyroid Segmentation and Volume Estimation Using CT Images: I J I R S E Tkhaleel_anwar2000No ratings yet
- A Simple Anomaly Detection For Spectral Imagery Using Co-Occurrence Statistics TechniquesDocument4 pagesA Simple Anomaly Detection For Spectral Imagery Using Co-Occurrence Statistics TechniqueszallpallNo ratings yet
- Real-Time Laser Profile Edge Detection by VotingDocument8 pagesReal-Time Laser Profile Edge Detection by Votingharsha3250No ratings yet
- 2022 Toptas DetectionOfOpticDiscLocalizatiDocument18 pages2022 Toptas DetectionOfOpticDiscLocalizatiIvo SoaresNo ratings yet
- ArticleDocument10 pagesArticleAhmad RidwanNo ratings yet
- Human Identification Using Finger ImagesDocument4 pagesHuman Identification Using Finger ImagesesatjournalsNo ratings yet
- Applied Sciences: Three-Dimensional Identification For Unbalanced Mass of Rotor Systems in OperationDocument14 pagesApplied Sciences: Three-Dimensional Identification For Unbalanced Mass of Rotor Systems in OperationMithra SNo ratings yet
- Comparative Study On The Performance of Textural Image Features For Active Contour SegmentationDocument9 pagesComparative Study On The Performance of Textural Image Features For Active Contour SegmentationDimona MoldovanuNo ratings yet
- DSA Image Registration Based On Multiscale Gabor Filters and Mutual InformationDocument6 pagesDSA Image Registration Based On Multiscale Gabor Filters and Mutual InformationerdoganaaaNo ratings yet
- Image Segmentation: FemurDocument18 pagesImage Segmentation: FemurBoobalan RNo ratings yet
- Elasticity Detection of IMT of Common Carotid ArteryDocument4 pagesElasticity Detection of IMT of Common Carotid Arterypurushothaman sinivasanNo ratings yet
- Fast Calculation of Histogram of Oriented Gradient Feature by Removing Redundancy in Overlapping BlockDocument13 pagesFast Calculation of Histogram of Oriented Gradient Feature by Removing Redundancy in Overlapping Blocksundar prasadNo ratings yet
- Alignment of X-Ray Bone ImagesDocument4 pagesAlignment of X-Ray Bone Imagesimad khanNo ratings yet
- Computer-Aided Morphological Analysis For Maxillo-Facial Diagnostic: A Preliminary StudyDocument9 pagesComputer-Aided Morphological Analysis For Maxillo-Facial Diagnostic: A Preliminary StudyReem AltameemiNo ratings yet
- Application of Soft Computing Approach For Edge DetectionDocument7 pagesApplication of Soft Computing Approach For Edge DetectionInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- A New Hybrid Method For TheDocument8 pagesA New Hybrid Method For ThesipijNo ratings yet
- 05 Ijictv3n9spl PDFDocument6 pages05 Ijictv3n9spl PDFBudi Utami FahnunNo ratings yet
- Fingerprint Authentication With Minutiae Using Ridge Feature ExtractionDocument5 pagesFingerprint Authentication With Minutiae Using Ridge Feature ExtractionInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Recent Advances in Echocardiography: SciencedirectDocument3 pagesRecent Advances in Echocardiography: SciencedirecttommyakasiaNo ratings yet
- De Las Telecomunicaciones A Las Tic Lei de Tic de Colombia l1341 09Document8 pagesDe Las Telecomunicaciones A Las Tic Lei de Tic de Colombia l1341 09Andres VeLandiaNo ratings yet
- Cardiac Arrhythmia Beat Classification Using DOST and PSO Tuned SVMDocument28 pagesCardiac Arrhythmia Beat Classification Using DOST and PSO Tuned SVMlogu_thalirNo ratings yet
- Medical Image SegmentationDocument31 pagesMedical Image SegmentationMd. Ayash IslamNo ratings yet
- Atlas of CT Angiography: Normal and Pathologic FindingsFrom EverandAtlas of CT Angiography: Normal and Pathologic FindingsNo ratings yet
- Multi-modality Cardiac Imaging: Processing and AnalysisFrom EverandMulti-modality Cardiac Imaging: Processing and AnalysisPatrick ClarysseNo ratings yet
- A Study On The Reasons For Transgender To Become EntrepreneursDocument7 pagesA Study On The Reasons For Transgender To Become EntrepreneursIAEME PublicationNo ratings yet
- Modeling and Analysis of Surface Roughness and White Later Thickness in Wire-Electric Discharge Turning Process Through Response Surface MethodologyDocument14 pagesModeling and Analysis of Surface Roughness and White Later Thickness in Wire-Electric Discharge Turning Process Through Response Surface MethodologyIAEME PublicationNo ratings yet
- Broad Unexposed Skills of Transgender EntrepreneursDocument8 pagesBroad Unexposed Skills of Transgender EntrepreneursIAEME PublicationNo ratings yet
- Determinants Affecting The User's Intention To Use Mobile Banking ApplicationsDocument8 pagesDeterminants Affecting The User's Intention To Use Mobile Banking ApplicationsIAEME PublicationNo ratings yet
- Analyse The User Predilection On Gpay and Phonepe For Digital TransactionsDocument7 pagesAnalyse The User Predilection On Gpay and Phonepe For Digital TransactionsIAEME PublicationNo ratings yet
- Impact of Emotional Intelligence On Human Resource Management Practices Among The Remote Working It EmployeesDocument10 pagesImpact of Emotional Intelligence On Human Resource Management Practices Among The Remote Working It EmployeesIAEME PublicationNo ratings yet
- Voice Based Atm For Visually Impaired Using ArduinoDocument7 pagesVoice Based Atm For Visually Impaired Using ArduinoIAEME PublicationNo ratings yet
- Attrition in The It Industry During Covid-19 Pandemic: Linking Emotional Intelligence and Talent Management ProcessesDocument15 pagesAttrition in The It Industry During Covid-19 Pandemic: Linking Emotional Intelligence and Talent Management ProcessesIAEME PublicationNo ratings yet
- Gandhi On Non-Violent PoliceDocument8 pagesGandhi On Non-Violent PoliceIAEME PublicationNo ratings yet
- Visualising Aging Parents & Their Close Carers Life Journey in Aging EconomyDocument4 pagesVisualising Aging Parents & Their Close Carers Life Journey in Aging EconomyIAEME PublicationNo ratings yet
- Influence of Talent Management Practices On Organizational Performance A Study With Reference To It Sector in ChennaiDocument16 pagesInfluence of Talent Management Practices On Organizational Performance A Study With Reference To It Sector in ChennaiIAEME PublicationNo ratings yet
- A Study of Various Types of Loans of Selected Public and Private Sector Banks With Reference To Npa in State HaryanaDocument9 pagesA Study of Various Types of Loans of Selected Public and Private Sector Banks With Reference To Npa in State HaryanaIAEME PublicationNo ratings yet
- A Study On The Impact of Organizational Culture On The Effectiveness of Performance Management Systems in Healthcare Organizations at ThanjavurDocument7 pagesA Study On The Impact of Organizational Culture On The Effectiveness of Performance Management Systems in Healthcare Organizations at ThanjavurIAEME PublicationNo ratings yet
- A Study On Talent Management and Its Impact On Employee Retention in Selected It Organizations in ChennaiDocument16 pagesA Study On Talent Management and Its Impact On Employee Retention in Selected It Organizations in ChennaiIAEME PublicationNo ratings yet
- Role of Social Entrepreneurship in Rural Development of India - Problems and ChallengesDocument18 pagesRole of Social Entrepreneurship in Rural Development of India - Problems and ChallengesIAEME PublicationNo ratings yet
- Dealing With Recurrent Terminates in Orchestrated Reliable Recovery Line Accumulation Algorithms For Faulttolerant Mobile Distributed SystemsDocument8 pagesDealing With Recurrent Terminates in Orchestrated Reliable Recovery Line Accumulation Algorithms For Faulttolerant Mobile Distributed SystemsIAEME PublicationNo ratings yet
- A Multiple - Channel Queuing Models On Fuzzy EnvironmentDocument13 pagesA Multiple - Channel Queuing Models On Fuzzy EnvironmentIAEME PublicationNo ratings yet
- Optimal Reconfiguration of Power Distribution Radial Network Using Hybrid Meta-Heuristic AlgorithmsDocument13 pagesOptimal Reconfiguration of Power Distribution Radial Network Using Hybrid Meta-Heuristic AlgorithmsIAEME PublicationNo ratings yet
- EXPERIMENTAL STUDY OF MECHANICAL AND TRIBOLOGICAL RELATION OF NYLON/BaSO4 POLYMER COMPOSITESDocument9 pagesEXPERIMENTAL STUDY OF MECHANICAL AND TRIBOLOGICAL RELATION OF NYLON/BaSO4 POLYMER COMPOSITESIAEME PublicationNo ratings yet
- Application of Frugal Approach For Productivity Improvement - A Case Study of Mahindra and Mahindra LTDDocument19 pagesApplication of Frugal Approach For Productivity Improvement - A Case Study of Mahindra and Mahindra LTDIAEME PublicationNo ratings yet
- Various Fuzzy Numbers and Their Various Ranking ApproachesDocument10 pagesVarious Fuzzy Numbers and Their Various Ranking ApproachesIAEME PublicationNo ratings yet
- A Proficient Minimum-Routine Reliable Recovery Line Accumulation Scheme For Non-Deterministic Mobile Distributed FrameworksDocument10 pagesA Proficient Minimum-Routine Reliable Recovery Line Accumulation Scheme For Non-Deterministic Mobile Distributed FrameworksIAEME PublicationNo ratings yet
- Moderating Effect of Job Satisfaction On Turnover Intention and Stress Burnout Among Employees in The Information Technology SectorDocument7 pagesModerating Effect of Job Satisfaction On Turnover Intention and Stress Burnout Among Employees in The Information Technology SectorIAEME PublicationNo ratings yet
- Analysis of Fuzzy Inference System Based Interline Power Flow Controller For Power System With Wind Energy Conversion System During Faulted ConditionsDocument13 pagesAnalysis of Fuzzy Inference System Based Interline Power Flow Controller For Power System With Wind Energy Conversion System During Faulted ConditionsIAEME PublicationNo ratings yet
- Knowledge Self-Efficacy and Research Collaboration Towards Knowledge Sharing: The Moderating Effect of Employee CommitmentDocument8 pagesKnowledge Self-Efficacy and Research Collaboration Towards Knowledge Sharing: The Moderating Effect of Employee CommitmentIAEME PublicationNo ratings yet
- Financial Literacy On Investment Performance: The Mediating Effect of Big-Five Personality Traits ModelDocument9 pagesFinancial Literacy On Investment Performance: The Mediating Effect of Big-Five Personality Traits ModelIAEME PublicationNo ratings yet
- A Review of Particle Swarm Optimization (Pso) AlgorithmDocument26 pagesA Review of Particle Swarm Optimization (Pso) AlgorithmIAEME PublicationNo ratings yet
- Prediction of Average Total Project Duration Using Artificial Neural Networks, Fuzzy Logic, and Regression ModelsDocument13 pagesPrediction of Average Total Project Duration Using Artificial Neural Networks, Fuzzy Logic, and Regression ModelsIAEME PublicationNo ratings yet
- Quality of Work-Life On Employee Retention and Job Satisfaction: The Moderating Role of Job PerformanceDocument7 pagesQuality of Work-Life On Employee Retention and Job Satisfaction: The Moderating Role of Job PerformanceIAEME PublicationNo ratings yet
- Analysis On Machine Cell Recognition and Detaching From Neural SystemsDocument9 pagesAnalysis On Machine Cell Recognition and Detaching From Neural SystemsIAEME PublicationNo ratings yet