You might also like
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Is Lim - Calculation of The Tripping ValueDocument4 pagesIs Lim - Calculation of The Tripping ValueRafael AnastacioNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- ABB - Limiting The Excitation of Synchronous Machine PDFDocument7 pagesABB - Limiting The Excitation of Synchronous Machine PDFRafael Anastacio100% (1)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- ABB - Field Suppression Equipment PDFDocument6 pagesABB - Field Suppression Equipment PDFRafael AnastacioNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Identification of Line ReactanceDocument7 pagesIdentification of Line ReactanceRafael AnastacioNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- BBC - Series Compounding of Self-Excited Synchronous GeneratorsDocument7 pagesBBC - Series Compounding of Self-Excited Synchronous GeneratorsRafael AnastacioNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Mz081001en PDFDocument8 pagesMz081001en PDFDung Huynh XuanNo ratings yet
- BBC - Volts Por Hertz - Limiter - Operating InstructionDocument4 pagesBBC - Volts Por Hertz - Limiter - Operating InstructionRafael AnastacioNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Strike - Zorc - ManualDocument14 pagesStrike - Zorc - ManualRafael AnastacioNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- BBC - Calculations of Short-Circuit Currents and PowersDocument17 pagesBBC - Calculations of Short-Circuit Currents and PowersRafael AnastacioNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
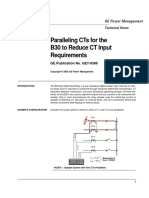
- GE - Paralleling CT's For B30Document2 pagesGE - Paralleling CT's For B30Rafael AnastacioNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Celule MTDocument172 pagesCelule MTMarius BotezatuNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- IEEE - Transformer Failure Due To Circuit-Breker-Induced Switching Transients - PCT - 365633 PDFDocument12 pagesIEEE - Transformer Failure Due To Circuit-Breker-Induced Switching Transients - PCT - 365633 PDFRafael AnastacioNo ratings yet
- BDocument51 pagesBRafael AnastacioNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- ABB - Field Suppression EquipmentDocument6 pagesABB - Field Suppression EquipmentRafael AnastacioNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- ABB - Limiting The Excitation of Synchronous Machine PDFDocument7 pagesABB - Limiting The Excitation of Synchronous Machine PDFRafael Anastacio100% (1)
- Slip Stabilization EquipmentDocument8 pagesSlip Stabilization EquipmentRafael AnastacioNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- BBC - Series Compounding of Self-Excited Synchronous GeneratorsDocument7 pagesBBC - Series Compounding of Self-Excited Synchronous GeneratorsRafael AnastacioNo ratings yet
- 1MRG015245 en Protection of Static Var Compensator (SVC)Document6 pages1MRG015245 en Protection of Static Var Compensator (SVC)Rafael AnastacioNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- BBC - Volts Por Hertz - Limiter - Operating InstructionDocument4 pagesBBC - Volts Por Hertz - Limiter - Operating InstructionRafael AnastacioNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Slip StabilizationDocument8 pagesSlip StabilizationRafael AnastacioNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Arc Resistance Calculator HelpDocument3 pagesArc Resistance Calculator Helpjavedsmg1No ratings yet
- Infrared CO2 Sensor Module (Model: MH-Z19B) : User's ManualDocument9 pagesInfrared CO2 Sensor Module (Model: MH-Z19B) : User's ManualAvs ElectronNo ratings yet
- Hysteresis ControllerDocument9 pagesHysteresis ControllerengrarNo ratings yet
- I010-E1-03 3g3iv Users ManualDocument71 pagesI010-E1-03 3g3iv Users ManualHaresh vaghelaNo ratings yet
- Exp 2Document19 pagesExp 2Zain NadeemNo ratings yet
- Power Electronics: DC-DC ConvertersDocument12 pagesPower Electronics: DC-DC ConverterskkkNo ratings yet
- Speed Control of Induction Motor Using PI and V/F Scalar Vector ControllersDocument9 pagesSpeed Control of Induction Motor Using PI and V/F Scalar Vector ControllersYesha ShahNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (120)
- Zdree 2XDocument16 pagesZdree 2XTayfun GunalNo ratings yet
- Top224yn PDFDocument20 pagesTop224yn PDFomarNo ratings yet
- A New Mathematical Model and Control of A Three-Phase Ac-Dc Voltage Source ConverterDocument9 pagesA New Mathematical Model and Control of A Three-Phase Ac-Dc Voltage Source ConverterrasoolNo ratings yet
- (12.4) Optimized Space Vector Switching Sequences For Multilevel InvertersDocument8 pages(12.4) Optimized Space Vector Switching Sequences For Multilevel Invertersenrico piccoNo ratings yet
- Hardware (Final Year Projects)Document101 pagesHardware (Final Year Projects)sriharidino100% (11)
- Power Electronics 1: ENEL371S2Document17 pagesPower Electronics 1: ENEL371S2bpd21No ratings yet
- CAT C13 2007 Service Bulletin (Cooling Sys, DPF, and Diagnostic Trouble Codes)Document34 pagesCAT C13 2007 Service Bulletin (Cooling Sys, DPF, and Diagnostic Trouble Codes)Jonathan Carlson100% (4)
- Bitm Arm Lab ManualDocument18 pagesBitm Arm Lab ManualPriya PydeeNo ratings yet
- Project Report of Be 7TH Sem FinalDocument15 pagesProject Report of Be 7TH Sem FinalpayalNo ratings yet
- PWM IC For SMPS IntroductionOB2263 PDFDocument42 pagesPWM IC For SMPS IntroductionOB2263 PDFmiharkukNo ratings yet
- Dcom-Pam - PPM - PWM Scientech 2110Document43 pagesDcom-Pam - PPM - PWM Scientech 2110Shivangi Pandey100% (1)
- dsPIC30F4011 DatasheetDocument226 pagesdsPIC30F4011 DatasheetbienlangnxtNo ratings yet
- L - P, S D - C D I: OW Ower Ingle AND UAL Hannel Igital SolatorsDocument37 pagesL - P, S D - C D I: OW Ower Ingle AND UAL Hannel Igital SolatorshmopjmzdzvaluidrkyNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Product Overview: Tl494: PWM Controller (Up To 200 KHZ)Document2 pagesProduct Overview: Tl494: PWM Controller (Up To 200 KHZ)Gavin PintoNo ratings yet
- Raspberry WiringPiDocument26 pagesRaspberry WiringPiMircea TirziuNo ratings yet
- CommLab PWM PDFDocument2 pagesCommLab PWM PDFDiki NugrahaNo ratings yet
- ELEC1111 - Lab WorkDocument7 pagesELEC1111 - Lab WorkWilliam LuoNo ratings yet
- ZS6312 V1.0Document12 pagesZS6312 V1.0Franzua PlasenciaNo ratings yet
- 1410 Membranpumpen Diaphragm Membrane 12V 24V Vakuum DruckDocument12 pages1410 Membranpumpen Diaphragm Membrane 12V 24V Vakuum Druckvishal.nithamNo ratings yet
- Acs 1000 Technical CatalogDocument106 pagesAcs 1000 Technical CatalogMiguel LaraNo ratings yet
- Learn & Make Your Own Cheap L293D Motor Driver (A Complete Guide For l293D) - Just4electronicsDocument16 pagesLearn & Make Your Own Cheap L293D Motor Driver (A Complete Guide For l293D) - Just4electronicsbrahimNo ratings yet
- Quasi-Resonant Coolset Design Guide Ice2Qrxx65/80XDocument12 pagesQuasi-Resonant Coolset Design Guide Ice2Qrxx65/80Xmaicuongdt2No ratings yet
- EE6611-Power Electronics and Drives LaboratoryDocument104 pagesEE6611-Power Electronics and Drives Laboratoryarshia tabassumNo ratings yet
- 4-String, Max 400mA/String, 80V Return, Step-Up, WLED ControllerDocument17 pages4-String, Max 400mA/String, 80V Return, Step-Up, WLED ControllerLucía MitchellNo ratings yet