You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5810)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (844)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- 50 HR Interview Questions and Answers, HR Interview PDFDocument8 pages50 HR Interview Questions and Answers, HR Interview PDFPraneethBrand50% (2)
- Storage Artefacts in Peripheral Blood Smears: Original Research ArticleDocument5 pagesStorage Artefacts in Peripheral Blood Smears: Original Research ArticleI.k. NeenaNo ratings yet
- Curriculum Vitae: Dr. Andallib TariqDocument3 pagesCurriculum Vitae: Dr. Andallib TariqI.k. NeenaNo ratings yet
- 1384945694Document42 pages1384945694I.k. NeenaNo ratings yet
- PIC Mid C 1Document21 pagesPIC Mid C 1I.k. Neena100% (1)
- ADMISSION TICKET (Provisional) ThiruvananthapuramDocument3 pagesADMISSION TICKET (Provisional) ThiruvananthapuramI.k. NeenaNo ratings yet
- Kerala State Electronics Development Corporation Limited Trivandrum Verification ReportDocument2 pagesKerala State Electronics Development Corporation Limited Trivandrum Verification ReportI.k. NeenaNo ratings yet
- Not 0162013 5342013Document4 pagesNot 0162013 5342013I.k. NeenaNo ratings yet
- 3.home AutomationDocument6 pages3.home AutomationI.k. NeenaNo ratings yet
- Buried Silicon-Germanium Pmosfets: Experimental Analysis in Vlsi Logic Circuits Under Aggressive Voltage ScalingDocument9 pagesBuried Silicon-Germanium Pmosfets: Experimental Analysis in Vlsi Logic Circuits Under Aggressive Voltage ScalingI.k. NeenaNo ratings yet
- Si Sige Si Cap: Si Si - 210Mv B) A)Document1 pageSi Sige Si Cap: Si Si - 210Mv B) A)I.k. NeenaNo ratings yet
- XBee/XBee Pro ZB RF Modules Manual (90000976 - G)Document155 pagesXBee/XBee Pro ZB RF Modules Manual (90000976 - G)Joseph SimpkinsNo ratings yet
- ASR 1000 OverviewDocument37 pagesASR 1000 Overviewssuresh19747745No ratings yet
- Deed of Donation: Know All Men by These PresentsDocument2 pagesDeed of Donation: Know All Men by These PresentsJomar Borongan100% (1)
- Home - Ecourt India ServicesDocument3 pagesHome - Ecourt India Servicesssiva21No ratings yet
- Yokogawa CA100Document5 pagesYokogawa CA100ALFAKNo ratings yet
- Supply Chain Analytics Concepts Techniques and Applications 1St Edition Kurt Y Liu Full ChapterDocument67 pagesSupply Chain Analytics Concepts Techniques and Applications 1St Edition Kurt Y Liu Full Chapterrobert.pizzo352100% (9)
- Skype GSM Gateway v1Document8 pagesSkype GSM Gateway v10wnNo ratings yet
- Michell Instruments Condumax II US Datasheet v10-1Document6 pagesMichell Instruments Condumax II US Datasheet v10-1Hira MahmoodNo ratings yet
- Multi Threading in JavaDocument63 pagesMulti Threading in JavaKISHOREMUTCHARLANo ratings yet
- Iot-Notes PDFDocument97 pagesIot-Notes PDFRajan SahotaNo ratings yet
- Project WorkDocument21 pagesProject WorkHarsh NegiNo ratings yet
- Samsung JSR 234 DraftDocument24 pagesSamsung JSR 234 DraftVishuv SethiNo ratings yet
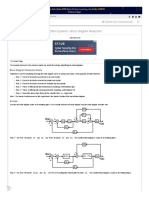
- Control Systems Block Diagram Reduction Www-TutorialspointDocument2 pagesControl Systems Block Diagram Reduction Www-TutorialspointshrikrisNo ratings yet
- How To Build High Efficiency Low Cost InverterDocument7 pagesHow To Build High Efficiency Low Cost Invertermaster chibuking100% (1)
- Dsa Lab Manual Lab6Document4 pagesDsa Lab Manual Lab6Raj ShahNo ratings yet
- Adopsi Inovasi Petani Kelapa Sawit Terha PDFDocument10 pagesAdopsi Inovasi Petani Kelapa Sawit Terha PDFAri Andriyas PujiNo ratings yet
- Library Management System Using QR Code A Project SynopsisDocument13 pagesLibrary Management System Using QR Code A Project SynopsisSaqlain AjmrtyNo ratings yet
- FIOA-0800-L: Quick Start Manual ForDocument6 pagesFIOA-0800-L: Quick Start Manual ForJhon SierraNo ratings yet
- Embedded Systems VirtualizationDocument14 pagesEmbedded Systems VirtualizationStevan MilinkovicNo ratings yet
- A Generic ConceptualDocument13 pagesA Generic Conceptualziyad alturkiNo ratings yet
- Which Statement Is A Syntactically CorreDocument21 pagesWhich Statement Is A Syntactically CorreDeny Iskandar PutraNo ratings yet
- Debug 1214Document4 pagesDebug 1214Virgil AnmaNo ratings yet
- 002.3-Mek-Itp-Nk - PKT Quality Plan and Manual of Tripper Car and Telescopic Chute - Kk1Document25 pages002.3-Mek-Itp-Nk - PKT Quality Plan and Manual of Tripper Car and Telescopic Chute - Kk1Ahmad FaujiNo ratings yet
- Microsoft Project 2013 Practical Exercises Pracs1to4 V2Document65 pagesMicrosoft Project 2013 Practical Exercises Pracs1to4 V2sravaniNo ratings yet
- ERP Systems Functionalities in Higher Education PDFDocument12 pagesERP Systems Functionalities in Higher Education PDFAuguste ComteNo ratings yet
- File Handling: CICS Training Class-06Document17 pagesFile Handling: CICS Training Class-06VasilNo ratings yet
- Journal of Vacation Marketing 2012 Hvass 93 103Document12 pagesJournal of Vacation Marketing 2012 Hvass 93 103marketing2008100% (1)
- 802.11n Wireless Router Enhwi-N3 Encore ElectronicsDocument97 pages802.11n Wireless Router Enhwi-N3 Encore ElectronicsFelix MorenoNo ratings yet
- Expand Virtual Hard Disks Attached To A Windows VM in An Azure - Azure Virtual Machines Microsoft DocsDocument11 pagesExpand Virtual Hard Disks Attached To A Windows VM in An Azure - Azure Virtual Machines Microsoft DocsalmannanNo ratings yet
- ZO4 o 9 MFDocument4 pagesZO4 o 9 MFpremakoNo ratings yet