You might also like
- Bratt JordanaDocument92 pagesBratt Jordanamirra26No ratings yet
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorFrom EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorNo ratings yet
- Hybrid InverterDocument34 pagesHybrid InverterPrem KumarNo ratings yet
- Microcontroller Based Solar Power Inverter: Ruchika Thukral, Ankit Gupta, Nilesh Kumar Verma, Shivanchal AsthanaDocument9 pagesMicrocontroller Based Solar Power Inverter: Ruchika Thukral, Ankit Gupta, Nilesh Kumar Verma, Shivanchal AsthanaBubai BhattacharyyaNo ratings yet
- Generator DroopDocument60 pagesGenerator DroopGanti1977100% (1)
- Methods for Increasing the Quality and Reliability of Power System Using FACTS DevicesFrom EverandMethods for Increasing the Quality and Reliability of Power System Using FACTS DevicesNo ratings yet
- Project: Solar Powered Induction Motor DriveDocument75 pagesProject: Solar Powered Induction Motor DriveDebanjan ChatterjeeNo ratings yet
- Solar 3Document19 pagesSolar 3Asif MuhammadNo ratings yet
- Power Electronics Applied to Industrial Systems and Transports, Volume 3: Switching Power SuppliesFrom EverandPower Electronics Applied to Industrial Systems and Transports, Volume 3: Switching Power SuppliesNo ratings yet
- Boost and buck-boost converters explainedDocument88 pagesBoost and buck-boost converters explainedTamil SelvanNo ratings yet
- Modern Control of DC-Based Power Systems: A Problem-Based ApproachFrom EverandModern Control of DC-Based Power Systems: A Problem-Based ApproachNo ratings yet
- Alabama Engineering University, Invertors, Prof - Dr.eng. Jonathan Taylor - MoonDocument13 pagesAlabama Engineering University, Invertors, Prof - Dr.eng. Jonathan Taylor - MoonOvidiu StoianNo ratings yet
- Final Solar ReportDocument13 pagesFinal Solar Reportاسعد الماوريNo ratings yet
- Benchmark System Document - v2 - Part IDocument20 pagesBenchmark System Document - v2 - Part IERGİN KAYARNo ratings yet
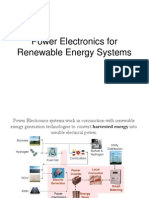
- Power Electronics For Renewable Energy SystemsDocument33 pagesPower Electronics For Renewable Energy SystemssrilakshmisiriNo ratings yet
- Chapter One - InverterDocument4 pagesChapter One - Inverterkoncypike100% (4)
- Distributed Generation, Customer Premise Loads & the Utility Network: A Case Study on Power Factor CorrectionDocument33 pagesDistributed Generation, Customer Premise Loads & the Utility Network: A Case Study on Power Factor CorrectionDenverLimNo ratings yet
- Project ReportDocument12 pagesProject Reportaqib naveedNo ratings yet
- Analysis and Validation of A Real-Time AC Drive Simulator, 2004.Document10 pagesAnalysis and Validation of A Real-Time AC Drive Simulator, 2004.Ali H. NumanNo ratings yet
- Diesel GensetsDocument8 pagesDiesel GensetsSaif AliNo ratings yet
- Sine Wave Inverter With PICDocument50 pagesSine Wave Inverter With PICmtrapkNo ratings yet
- Fault Current Contribution From Synchronous Machine and Inverter Based DGDocument8 pagesFault Current Contribution From Synchronous Machine and Inverter Based DGabs1989No ratings yet
- Testing of Statcom Model in Ieee 0 Bus Power System Network Using Pscad and MatlabDocument8 pagesTesting of Statcom Model in Ieee 0 Bus Power System Network Using Pscad and Matlabsabarullah haliNo ratings yet
- Control of Voltage Source Converters for Offshore Wind Power TransmissionDocument69 pagesControl of Voltage Source Converters for Offshore Wind Power TransmissionAsad W. QureshiNo ratings yet
- Final Year Project Report Chapter 1,2Document13 pagesFinal Year Project Report Chapter 1,2Dhanush NNo ratings yet
- Back To Basics Vicor Power Design EbookDocument50 pagesBack To Basics Vicor Power Design Ebookmulleraf100% (1)
- Solar Micro InverterDocument23 pagesSolar Micro InverterHassan SouleymanNo ratings yet
- Thesis Power Factor CorrectionDocument5 pagesThesis Power Factor CorrectionYolanda Ivey100% (2)
- Bi-Directional AC-DC/DC-AC Converter For Power Sharing of Hybrid AC/DC SystemsDocument8 pagesBi-Directional AC-DC/DC-AC Converter For Power Sharing of Hybrid AC/DC SystemsJitender KaushalNo ratings yet
- Modeling OF Armature Controlled DC Motor Using Matlab Project (Matlab) - 2012 (Final Projects 2030)Document13 pagesModeling OF Armature Controlled DC Motor Using Matlab Project (Matlab) - 2012 (Final Projects 2030)NilNo ratings yet
- Hindawi Publishidng CorporationDocument27 pagesHindawi Publishidng CorporationAtul ChauhanNo ratings yet
- Power Converters For Wind Turbines: Current and Future DevelopmentDocument13 pagesPower Converters For Wind Turbines: Current and Future DevelopmentLullaby summerNo ratings yet
- Dowec Electrical System Baseline Design: WP1 Task 7 DOWEC 045 Rev. 2Document30 pagesDowec Electrical System Baseline Design: WP1 Task 7 DOWEC 045 Rev. 2Rui TimóteoNo ratings yet
- VSC-HVDC System Modeling and ValidationDocument132 pagesVSC-HVDC System Modeling and ValidationipfNo ratings yet
- Bipolar Pulse Width Modulation Inverter: Xin Chen Ryan HaradaDocument35 pagesBipolar Pulse Width Modulation Inverter: Xin Chen Ryan Haradavaralakshmi vanapalliNo ratings yet
- Research Inventy: International Journal of Engineering and ScienceDocument8 pagesResearch Inventy: International Journal of Engineering and ScienceinventyNo ratings yet
- ABSTRACT Control - of - Photovoltaic - Inverters - For - Transient - and - Voltage - Stability - EnhancementDocument4 pagesABSTRACT Control - of - Photovoltaic - Inverters - For - Transient - and - Voltage - Stability - Enhancementsayali kthalkarNo ratings yet
- Advanced Inverter Report 2013 FinalDocument16 pagesAdvanced Inverter Report 2013 FinalLaurence MichaelNo ratings yet
- Development of A MATLAB/Simulink Model of A Single-Phase Grid-Connected Photovoltaic SystemDocument8 pagesDevelopment of A MATLAB/Simulink Model of A Single-Phase Grid-Connected Photovoltaic SystemMohamed NabilNo ratings yet
- Unit 5 - Simulation of HVDC SystemDocument24 pagesUnit 5 - Simulation of HVDC Systemkarthik60% (10)
- A New Hybrid Solar-Wind Charging Station For Electric Vehicle Applications and Its SimulationDocument10 pagesA New Hybrid Solar-Wind Charging Station For Electric Vehicle Applications and Its SimulationIJRASETPublicationsNo ratings yet
- Vsi Fed 3ph ImDocument13 pagesVsi Fed 3ph ImWisemin LinsNo ratings yet
- Solar Charge Controller with Data Acquisition System Based on ArduinoDocument9 pagesSolar Charge Controller with Data Acquisition System Based on ArduinoolumideNo ratings yet
- DSP-Based Real-Time Implementation of AC-DC-AC Converter Using SPWM TechniqueDocument18 pagesDSP-Based Real-Time Implementation of AC-DC-AC Converter Using SPWM Techniquebalamurugan041992No ratings yet
- Teardown: The Power Inverter - From Sunlight To Power Grid: Steve TaranovichDocument14 pagesTeardown: The Power Inverter - From Sunlight To Power Grid: Steve TaranovichMinh PHAN THANHNo ratings yet
- Open Ended LabDocument8 pagesOpen Ended LabIHZAM ZIANo ratings yet
- Conclusion and Future Scope of Hybrid Power System with FACTS DevicesDocument4 pagesConclusion and Future Scope of Hybrid Power System with FACTS DevicesHamxa AmeerNo ratings yet
- GET-7203 - Art of Protective RelayingDocument19 pagesGET-7203 - Art of Protective RelayingArnab BanerjeeNo ratings yet
- Design and Implementation of 12V/24V Closed Loop Boost Converter For Solar Powered LED Lighting SystemDocument11 pagesDesign and Implementation of 12V/24V Closed Loop Boost Converter For Solar Powered LED Lighting Systemسعيد ابوسريعNo ratings yet
- MPPT For Standalone PV Systems With The Help of SEPIC ConverterDocument9 pagesMPPT For Standalone PV Systems With The Help of SEPIC ConverterIJRASETPublicationsNo ratings yet
- Z Source Inverter Thesis PDFDocument6 pagesZ Source Inverter Thesis PDFimmkhuwhd100% (3)
- Back-To-Back Converter Design and Control For Synchronous Generator-Based Wind TurbinesDocument8 pagesBack-To-Back Converter Design and Control For Synchronous Generator-Based Wind TurbinesBinh NgoNo ratings yet
- Transient Stability Analysis Using MiPowerDocument5 pagesTransient Stability Analysis Using MiPowerBhavik Prajapati100% (1)
- Optimize solar power switching with an automated transfer switchDocument7 pagesOptimize solar power switching with an automated transfer switchMaxwellNo ratings yet
- Inverter and BLDC ProjectDocument19 pagesInverter and BLDC ProjectArjun MathiasNo ratings yet
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionFrom EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionRating: 4.5 out of 5 stars4.5/5 (542)
- Off-Grid Projects: Step-by-Step Guide to Building Your Own Off-Grid SystemFrom EverandOff-Grid Projects: Step-by-Step Guide to Building Your Own Off-Grid SystemNo ratings yet
- 8051 Microcontroller: An Applications Based IntroductionFrom Everand8051 Microcontroller: An Applications Based IntroductionRating: 5 out of 5 stars5/5 (6)
- Practical Electrical Wiring: Residential, Farm, Commercial, and IndustrialFrom EverandPractical Electrical Wiring: Residential, Farm, Commercial, and IndustrialRating: 3.5 out of 5 stars3.5/5 (3)
- Practical Troubleshooting of Electrical Equipment and Control CircuitsFrom EverandPractical Troubleshooting of Electrical Equipment and Control CircuitsRating: 4 out of 5 stars4/5 (5)
- Upcycled Technology: Clever Projects You Can Do With Your Discarded Tech (Tech gift)From EverandUpcycled Technology: Clever Projects You Can Do With Your Discarded Tech (Tech gift)Rating: 4.5 out of 5 stars4.5/5 (2)
- 2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersFrom Everand2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersRating: 5 out of 5 stars5/5 (1)
- Practical Electronics for Inventors, Fourth EditionFrom EverandPractical Electronics for Inventors, Fourth EditionRating: 4 out of 5 stars4/5 (3)
- Ramblings of a Mad Scientist: 100 Ideas for a Stranger TomorrowFrom EverandRamblings of a Mad Scientist: 100 Ideas for a Stranger TomorrowNo ratings yet
- Lithium-Ion Battery: The Power of Electric Vehicles with Basics, Design, Charging technology & Battery Management SystemsFrom EverandLithium-Ion Battery: The Power of Electric Vehicles with Basics, Design, Charging technology & Battery Management SystemsRating: 5 out of 5 stars5/5 (2)
- The Fast Track to Your Technician Class Ham Radio License: For Exams July 1, 2022 - June 30, 2026From EverandThe Fast Track to Your Technician Class Ham Radio License: For Exams July 1, 2022 - June 30, 2026Rating: 5 out of 5 stars5/5 (1)
- Programming the Raspberry Pi, Third Edition: Getting Started with PythonFrom EverandProgramming the Raspberry Pi, Third Edition: Getting Started with PythonRating: 5 out of 5 stars5/5 (2)
- The Phone Fix: The Brain-Focused Guide to Building Healthy Digital Habits and Breaking Bad OnesFrom EverandThe Phone Fix: The Brain-Focused Guide to Building Healthy Digital Habits and Breaking Bad OnesRating: 5 out of 5 stars5/5 (1)