You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- ThyristorDocument13 pagesThyristorArchana Diwakar RanjishNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Class E ChopperDocument1 pageClass E ChopperArchana Diwakar RanjishNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Three PH Induction MotorDocument14 pagesThree PH Induction MotorArchana Diwakar RanjishNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- Ac Voltage Controller NumericalsDocument11 pagesAc Voltage Controller NumericalsArchana Diwakar RanjishNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- ThyristorDocument11 pagesThyristorArchana Diwakar RanjishNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- DC ChoppersDocument36 pagesDC ChoppersArchana Diwakar RanjishNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Single Phase ACDocument30 pagesSingle Phase ACArchana Diwakar RanjishNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- TriacDocument6 pagesTriacArchana Diwakar RanjishNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- DC MotorsDocument14 pagesDC MotorsArchana Diwakar RanjishNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
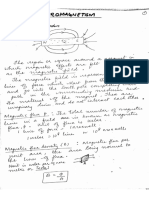
- Electromagnetism PDFDocument13 pagesElectromagnetism PDFArchana Diwakar RanjishNo ratings yet
- Mosfet Switching CharDocument4 pagesMosfet Switching CharArchana Diwakar RanjishNo ratings yet
- BLDC MotorDocument16 pagesBLDC MotorArchana Diwakar RanjishNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Didt DVDTDocument4 pagesDidt DVDTArchana Diwakar RanjishNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Semiconductor SwitchesDocument21 pagesSemiconductor SwitchesArchana Diwakar RanjishNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Transformers QB2015Document1 pageTransformers QB2015Archana Diwakar RanjishNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Ac Voltage ControllersDocument26 pagesAc Voltage ControllersArchana Diwakar RanjishNo ratings yet
- Transformer Notes PDFDocument18 pagesTransformer Notes PDFArchana Diwakar Ranjish100% (12)
- All FormulaeDocument2 pagesAll FormulaeArchana Diwakar RanjishNo ratings yet
- Transformer Notes PDFDocument18 pagesTransformer Notes PDFArchana Diwakar Ranjish100% (3)
- Electromagnetism ADDocument13 pagesElectromagnetism ADArchana Diwakar RanjishNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- SCR Firing CircuitsDocument12 pagesSCR Firing CircuitsArchana Diwakar Ranjish100% (1)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- Three Phase Circuits2016 PDFDocument16 pagesThree Phase Circuits2016 PDFArchana Diwakar RanjishNo ratings yet
- Emerging Solar Cell TechDocument16 pagesEmerging Solar Cell TechArchana Diwakar RanjishNo ratings yet
- DC GeneratorsDocument3 pagesDC GeneratorsArchana Diwakar RanjishNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- A Novel Method For Commutation Torque Ripple ReductionDocument15 pagesA Novel Method For Commutation Torque Ripple ReductionArchana Diwakar RanjishNo ratings yet
- Three Phase CircuitsDocument16 pagesThree Phase CircuitsArchana Diwakar RanjishNo ratings yet
- Buck Converter SimulinkDocument6 pagesBuck Converter SimulinkfrankersinatNo ratings yet
- Comparison Study of Maximum PowerDocument6 pagesComparison Study of Maximum PowerKhalid YahyaNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Probability DPP (1 To 7) 13th WADocument16 pagesProbability DPP (1 To 7) 13th WARaju SinghNo ratings yet
- Connective TissueDocument6 pagesConnective TissuecrtgyhujikNo ratings yet
- Unit Testing in Delphi by Nick Hodges 110214Document36 pagesUnit Testing in Delphi by Nick Hodges 110214air4gbNo ratings yet
- Guaranteed Restore Points Oracle 11g - Flash Back to SCN or RP (39Document2 pagesGuaranteed Restore Points Oracle 11g - Flash Back to SCN or RP (39PraveenNo ratings yet
- POWER GENERATION FROM OCEAN WAVESDocument14 pagesPOWER GENERATION FROM OCEAN WAVESChersey DoctorNo ratings yet
- Von-Neumann vs Harvard ArchitecturesDocument3 pagesVon-Neumann vs Harvard ArchitecturesRalstine Jane IgneNo ratings yet
- Abstract (Lab 2) Ionization ConstantDocument12 pagesAbstract (Lab 2) Ionization Constantmirdza94No ratings yet
- Operation & Service Manual For Cable Tensiometer: SeriesDocument28 pagesOperation & Service Manual For Cable Tensiometer: SeriesJonatan BernalNo ratings yet
- Wound ScaleDocument4 pagesWound ScaleHumam SyriaNo ratings yet
- Z 80 HelptopicsDocument5 pagesZ 80 HelptopicsEverly NNo ratings yet
- UNIT-1 Introduction To Emi: A Arunkumar GudivadaDocument47 pagesUNIT-1 Introduction To Emi: A Arunkumar GudivadaBhagya bhagiNo ratings yet
- Collet Chuck Catalog 2007 PDFDocument28 pagesCollet Chuck Catalog 2007 PDFAlexandru Marius-catalinNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Geotechnical Engineering Notes 333Document40 pagesGeotechnical Engineering Notes 333TinaNo ratings yet
- SQL SlidesDocument65 pagesSQL SlidescopsamostoNo ratings yet
- AP Calculus BC Study GuideDocument4 pagesAP Calculus BC Study GuideHarshil SahaiNo ratings yet
- OMC 140 Operator Manual v1.08Document38 pagesOMC 140 Operator Manual v1.08Anderson DuarteNo ratings yet
- Mediburn 30Document35 pagesMediburn 30Vsee EnkoNo ratings yet
- AminesDocument31 pagesAminesJoseph YayenNo ratings yet
- Unified Modeling Language Class Diagram ..Uml)Document20 pagesUnified Modeling Language Class Diagram ..Uml)Yasmeen AltuwatiNo ratings yet
- Basic Hydraulic SystemsDocument128 pagesBasic Hydraulic Systemsbeau04297% (35)
- ME4111 Engineering and Mechanical PrinciplesDocument5 pagesME4111 Engineering and Mechanical PrinciplesEdvard StarcevNo ratings yet
- 34a65 PDFDocument33 pages34a65 PDFvinu100% (2)
- Clone Steps RmanDocument10 pagesClone Steps RmanKishore AdikarNo ratings yet
- 03 Correcao Exercicios FixacaoDocument3 pages03 Correcao Exercicios FixacaoRodrigoNo ratings yet
- Oracle® Fusion Middleware: Administrator's Guide For Oracle Business Intelligence Applications 11g Release 1 (11.1.1.7)Document76 pagesOracle® Fusion Middleware: Administrator's Guide For Oracle Business Intelligence Applications 11g Release 1 (11.1.1.7)Nicholas JohnNo ratings yet
- B 2Document12 pagesB 2Mohamed Sayed Abdel GaffarNo ratings yet
- The Pauli Exclusion PrincipleDocument33 pagesThe Pauli Exclusion Principle3449336893No ratings yet
- Jurnal IlmiahDocument12 pagesJurnal IlmiahROSSITANo ratings yet
- Harduaganj Thermal Power Plant by Geetesh SharmaDocument66 pagesHarduaganj Thermal Power Plant by Geetesh Sharmageeteshaccurate100% (1)
- Forrester Roi StudyDocument30 pagesForrester Roi StudymcgettsNo ratings yet
- Introduction to Power System ProtectionFrom EverandIntroduction to Power System ProtectionRating: 5 out of 5 stars5/5 (1)
- Shorting the Grid: The Hidden Fragility of Our Electric GridFrom EverandShorting the Grid: The Hidden Fragility of Our Electric GridRating: 4.5 out of 5 stars4.5/5 (2)
- Nuclear Energy in the 21st Century: World Nuclear University PressFrom EverandNuclear Energy in the 21st Century: World Nuclear University PressRating: 4.5 out of 5 stars4.5/5 (3)
- Power of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesFrom EverandPower of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesRating: 4.5 out of 5 stars4.5/5 (21)