You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5814)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (844)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Campro Gen2 Sp4h WiringDocument170 pagesCampro Gen2 Sp4h WiringRigirtavarman Tamilchelvan72% (25)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Vtu Mba Marketing Project ReportDocument82 pagesVtu Mba Marketing Project ReportPushkal Goel25% (4)
- FINAT Technical Handbook Test Methods 9th Edition 2014 UKDocument100 pagesFINAT Technical Handbook Test Methods 9th Edition 2014 UKTravis H88% (17)
- TCRT5000Document9 pagesTCRT5000connect2nsNo ratings yet
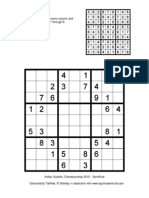
- ISC 2010 Offlined FH Final Round1 Linked Classics AnsDocument1 pageISC 2010 Offlined FH Final Round1 Linked Classics Ansconnect2nsNo ratings yet
- ACS714Document15 pagesACS714connect2nsNo ratings yet
- ISC 2010 Offline Final Round3 Mixed BagDocument4 pagesISC 2010 Offline Final Round3 Mixed Bagconnect2nsNo ratings yet
- ISC2010 SemifinalDocument6 pagesISC2010 Semifinalconnect2nsNo ratings yet
- Arise Sachin TendulkarDocument5 pagesArise Sachin Tendulkarconnect2nsNo ratings yet
- ISC 2010 D1 Mixed AnsDocument4 pagesISC 2010 D1 Mixed Ansconnect2nsNo ratings yet
- Couns ScheduleDocument2 pagesCouns Scheduleconnect2nsNo ratings yet
- Evaluation of Datalog Program PDFDocument2 pagesEvaluation of Datalog Program PDFHenryNo ratings yet
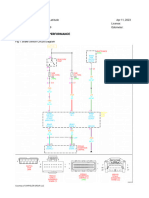
- P0571-Brake Switch 1 PerformanceDocument9 pagesP0571-Brake Switch 1 PerformancekingsmelendezNo ratings yet
- Mikroc GLCD Library PDFDocument12 pagesMikroc GLCD Library PDFKenaiNo ratings yet
- BFDDS 2006 Edition Chapter 12Document10 pagesBFDDS 2006 Edition Chapter 12Sergio AbbassNo ratings yet
- Dry TransformersDocument6 pagesDry TransformersJose Luius100% (1)
- Jti Cat 2011 01Document64 pagesJti Cat 2011 01Nithindev GuttikondaNo ratings yet
- HTM 2031 Autoclave Steam Sterilization Directives PDFDocument74 pagesHTM 2031 Autoclave Steam Sterilization Directives PDFJJ MM0% (1)
- Chrono Trigger WalkthroughDocument242 pagesChrono Trigger WalkthroughMax HessNo ratings yet
- Pitching Masterclass For StartupsDocument159 pagesPitching Masterclass For StartupsVidar Andersen100% (1)
- 207R Datasheet - FBE Rough OvercoatingDocument2 pages207R Datasheet - FBE Rough Overcoatingbello imamNo ratings yet
- LGL 2-4 Sliding Vane Pumps: Multi-Purpose LPG Pumps - Product BrochureDocument8 pagesLGL 2-4 Sliding Vane Pumps: Multi-Purpose LPG Pumps - Product BrochureĐình HiếuNo ratings yet
- Headset Gaming Sades 708 G-Power: Tentang KamiDocument6 pagesHeadset Gaming Sades 708 G-Power: Tentang KamiWidi WinaryoNo ratings yet
- Differential RAID: Rethinking RAID For SSD ReliabilityDocument5 pagesDifferential RAID: Rethinking RAID For SSD ReliabilityRabiul SikderNo ratings yet
- 04 Frekventni Regulatori I Soft Starteri - Altistart and AltivarDocument40 pages04 Frekventni Regulatori I Soft Starteri - Altistart and AltivarBudy AndikaNo ratings yet
- 5.5in 20 PPF Casing SpecDocument1 page5.5in 20 PPF Casing SpecWangsa SaputraNo ratings yet
- CA TPX User Enu r5.3Document105 pagesCA TPX User Enu r5.3borisg3No ratings yet
- 4 Power TransmissionDocument131 pages4 Power TransmissionAdrian MotocNo ratings yet
- Bus Improvement Letter To Chairman LhotaDocument4 pagesBus Improvement Letter To Chairman LhotaDavid MeyerNo ratings yet
- S Checklist QuestionsDocument4 pagesS Checklist QuestionsBevin BabuNo ratings yet
- Record Matching Over Query Results From Multiple Web DatabasesDocument27 pagesRecord Matching Over Query Results From Multiple Web DatabasesShamir_Blue_8603No ratings yet
- En15273-1 Cen FVDocument208 pagesEn15273-1 Cen FVSamuel Carlos Sanjuán TorresNo ratings yet
- Voltmeters - Ammeters Type DT96 and Type VA01Document2 pagesVoltmeters - Ammeters Type DT96 and Type VA01Bảo ChâuNo ratings yet
- Wika Pressure Gs08s01y01 e e Ed01Document16 pagesWika Pressure Gs08s01y01 e e Ed01Nguyễn Đăng QuýNo ratings yet
- Si LaDocument8 pagesSi LaAndres Osorio TNo ratings yet
- SNVMDocument2 pagesSNVMhandeavinash8No ratings yet