You might also like
- Elektrikle Tahrik h12Document10 pagesElektrikle Tahrik h12darksmoothNo ratings yet
- 7300pa Hizli Devreye AlmaDocument10 pages7300pa Hizli Devreye AlmadarksmoothNo ratings yet
- 7200gs Hizli Devreye AlmaDocument9 pages7200gs Hizli Devreye AlmadarksmoothNo ratings yet
- 7200 Gs Kullanim Klavuzu TurkceDocument34 pages7200 Gs Kullanim Klavuzu TurkcedarksmoothNo ratings yet
- 7200GS Hata MesajlariDocument2 pages7200GS Hata MesajlaridarksmoothNo ratings yet
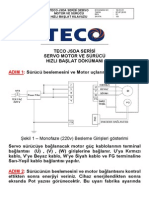
- JSDASERVOHizli Devreye AlmaDocument3 pagesJSDASERVOHizli Devreye AlmadarksmoothNo ratings yet
- Disaydinlatmaprojeleri PDFDocument87 pagesDisaydinlatmaprojeleri PDFdarksmoothNo ratings yet
- 7300pa Parametre Listesi TurkceDocument13 pages7300pa Parametre Listesi TurkcedarksmoothNo ratings yet
- SURUCULERDocument7 pagesSURUCULERdarksmoothNo ratings yet
- PLCye Sifre Koyma Ve KaldirmaDocument3 pagesPLCye Sifre Koyma Ve KaldirmadarksmoothNo ratings yet
- Siemens s7 300 Egitim NotlariDocument65 pagesSiemens s7 300 Egitim NotlariOvunc AkilNo ratings yet
- DOP Açılış ProblemiDocument1 pageDOP Açılış ProblemidarksmoothNo ratings yet
- Servo Kablo BağlantılarıDocument27 pagesServo Kablo Bağlantılarıdarksmooth100% (1)
- PLC Egitim Seti (Fp-2b)Document1 pagePLC Egitim Seti (Fp-2b)darksmoothNo ratings yet
- PLC Egitim Seti (Fp-3a)Document1 pagePLC Egitim Seti (Fp-3a)darksmoothNo ratings yet
- Kablo BağlantılarıDocument15 pagesKablo BağlantılarıdarksmoothNo ratings yet
- HesaplarDocument2 pagesHesaplardarksmoothNo ratings yet
- RLRCDocument15 pagesRLRCMehmet Kamil ŞahintepeNo ratings yet
- Monofaze KilavuzDocument12 pagesMonofaze KilavuzdarksmoothNo ratings yet
- Delta PLC Pals KomutlarıDocument15 pagesDelta PLC Pals KomutlarıdarksmoothNo ratings yet
- DVP MpuDocument3 pagesDVP MpudarksmoothNo ratings yet
- Ölçü TrafolarıDocument16 pagesÖlçü Trafolarımustafa039No ratings yet
- Da 1Document37 pagesDa 1cilgin282No ratings yet
- Autocad OlcekDocument3 pagesAutocad OlcekdarksmoothNo ratings yet
- 03 Autocad EditingDocument16 pages03 Autocad EditingdarksmoothNo ratings yet
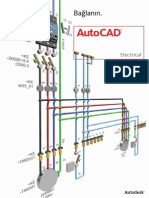
- AutoCAD Electrical TR ABDocument15 pagesAutoCAD Electrical TR ABdarksmoothNo ratings yet
- Logisim Ile Bilgisayar Mimarisi DersiDocument51 pagesLogisim Ile Bilgisayar Mimarisi DersiFatih TokgözNo ratings yet
- Elektrik Devreleri 2 - Mersin Üniversitesi - 3 Fazlı DevrelerDocument48 pagesElektrik Devreleri 2 - Mersin Üniversitesi - 3 Fazlı DevrelerEEM Ders Notları100% (2)
- Autocad AktivasyonDocument5 pagesAutocad AktivasyondarksmoothNo ratings yet