Professional Documents
Culture Documents
Genetic Programming An Introduction On The Automatic Evolution of Computer Programs and Its Applications - Morgan Kaufmann
Genetic Programming An Introduction On The Automatic Evolution of Computer Programs and Its Applications - Morgan Kaufmann
Uploaded by
sean888Original Title
Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Genetic Programming An Introduction On The Automatic Evolution of Computer Programs and Its Applications - Morgan Kaufmann
Genetic Programming An Introduction On The Automatic Evolution of Computer Programs and Its Applications - Morgan Kaufmann
Uploaded by
sean888Copyright:
Available Formats
Genetic Programming
A n In troduction
O n th e A u tomatic E v ol u tion of C omp u ter Programs and Its A p p l ications
Wolf gang Banzh af
Peter Nord in
Robert E . Kel l er
Frank D. Francone
dpunkt.verlag
-
Morgan Kau f mann Pu bl is h ers , I nc. d p u nkt
S an Francis co, C al if ornia Verl ag fuer d igital e Tech nol ogie GmbH
Heid el berg
Copublished by dpunkt.verlag and Morgan Kaufmann Publishers, Inc.
dpunkt.verlag
S p ons oring E d itor
Prod u ction Manager
C op yed itor
Mich ael Barabas
Jos ef Hegel e
A nd rew Ros s
Morgan Kaufmann Publishers, Inc.
S p ons oring E d itor Mich ael B. Morgan
Prod u ction Manager Yonie O v ertoil
Prod u ction E d itor E l is abeth Bel l er
C ov er Des ign Ros s C arron Des ign
C ov er Ph oto C h ris Howes /Mas terf il e
C ov er I l l u s tration C h erie Pl u ml ee
Proof read er Robert Fis ke
Printer C ou rier C orp oration
Th is book h as been au th or-typ es et u s ing LaTE X.
Des ignations u s ed by comp anies to d is tingu is h th eir p rod u cts are of ten cl aimed as trad emarks or regis tered trad emarks .
In all ins tances wh ere Morgan Kau f mann Pu bl is h ers , I nc. and d p u nkt GmbH are aware of a cl aim, th e p rod u ct names
ap p ear in initial cap ital or all cap ital l etters . Read ers , h owev er, s h ou l d contact th e ap p rop riate comp anies for more comp l ete
inf ormation regard ing trad emarks and regis tration.
A v ailable in Germany, A u s tria, and S witzerl and f rom
d p u nkt Verlag fur d igital e Tech nol ogic GmbH
Rings tras s e 19
D-69115 Heid el berg
Germany
Tel ep h one +49/6221/1483-12
Facs imil e +49/6221/1483-99
E mail h al l o@d p u nkt.d e
WWW www.d p u nkt.d e
A v ailable in all oth er cou ntries from
Morgan Kau f mann Pu bl is h ers , I nc.
E d itorial and S ales O ffice
340 Pine S treet, S ixth Fl oor
S an Francis co, C A 94104-3205
US A
Tel ep h one 415/392-2665
Facs imil e 415/982-2665
E mail mkp @mkp .com
WWW www.mkp .com
O rd er tol l free 800/745-7323
1998 Morgan Kau f mann Pu bl is h ers , I nc. and d p u nktVerl ag fur d igital e Tech nol ogic GmbH
A ll righ ts res erv ed
Printed in th e United S tates of A merica
02 01 5 4 3
No p art of th is p u bl ication may be rep rod u ced , s tored in a retriev al s ys tem, or trans mitted in any f orm or by any
means el ectronic, mech anical , p h otocop ying, record ing, or oth erwis ewith ou t th e p rior written p ermis s ion of th e
p u bl is h er.
Library of Congress Cataloging-in-Publication Data
Genetic p rogrammingan introd u ction : on th e au tomatic ev ol u tion of
comp u ter p rograms and its ap p l ications / Wolf gang Banzh af ... [et al .].
p . cm.
I ncl u d es bibl iograp h ical ref erences and ind ex.
I S BN 1 -55860-510-X
1. Genetic p rogramming (C omp u ter s cience) I . Banzh af, Wolf gang, d ate.
QA 76.623.G46 1998
006.3'1d c21 97-51603
C I P
MKP I S BN:
d p u nkt I S BN:
1-55860-510-X
3-920993-58-6
To Pia, Teres a, Bened ikt and Ju d ith ,
wh o h ad to s acrif ice many ev enings and weekend s f or th is
book to become p os s ibl e.
Wolfgan g Ban zhaf
To my f amil y and f riend s , wh o were
th ere wh en times got tou gh . To th e l ov el y Mis s C h ris tina
E s p anto, wh o makes ev en th e tou gh times good .
Fran k D. Fran con e
To th os e wh o mis s ed me wh il e I was working on th is book.
Robert E. Keller
To my p arents S et and I nga.
Peter Nordin
Foreword by John R. Koza
Genetic p rogramming ad d res s es th e p robl em of au tomatic p rogram
ming, namel y, th e p robl em of h ow to enabl e a comp u ter to d o u s ef u l
th ings with ou t ins tru cting it, s tep by s tep , on h ow to d o it.
Banzh af , Nord in, Kel l er, and Francone h av e p erf ormed a remark
abl e d ou bl e s erv ice with th is excel l ent book on genetic p rogramming.
Firs t, th ey h av e written a book with an u p -to-d ate ov erv iew
of th e au tomatic creation of comp u ter p rograms by means of
ev ol u tion. Th is ef f ort is es p ecial l y wel come becau s e of th e rap id
growth of th is f iel d ov er th e p as t few years (as ev id enced by
f actors s u ch as th e more th an 800 p ap ers p u bl is h ed by s ome
200 au th ors s ince 1992).
G S econd , th ey h av e brou gh t togeth er and p res ented th eir own in
nov ativ e and f ormid abl e work on th e ev ol u tion of l inear genomes
and mach ine cod e in p articu l ar. Th eir work is es p ecial l y im
p ortant becau s e it can greatl y accel erate genetic p rogramming.
Th e rap id growth of th e f iel d of genetic p rogramming ref l ects
th e growing recognition th at, af ter h al f a centu ry of res earch in th e
f iel d s of artif icial intel l igence, mach ine l earing, ad ap tiv e s ys tems , au
tomated l ogic, exp ert s ys tems , and neu ral networks , we may f inal l y
h av e a way to ach iev e au tomatic p rogramming. Wh en we u s e th e
term automatic programmin g, we mean a s ys tem th at
1. p rod u ces an entity th at ru ns on a comp u ter (i.e., eith er a com
p u ter p rogram or s ometh ing th at is eas il y conv ertibl e into a
p rogram),
2. s ol v es a broad v ariety of p robl ems ,
3. requ ires a minimu m of u s er-s u p p l ied p robl em-s p ecif ic informa
tion,
4. in p articu l ar, d oes n't requ ire th e u s er to p res p ecif y th e s ize and
s h ap e of th e u l timate s ol u tion,
5. imp l ements , in s ome way, al l th e f amil iar and u s ef u l p rogram
ming cons tru cts (s u ch as memory, iteration, p arameterizabl e
s u brou tines , h ierarch ical l y cal l abl e s u brou tines , d ata s tru ctu res ,
and recu rs ion),
6. d oes n't requ ire th e u s er to d ecomp os e th e p robl em in ad v ance,
to id entif y s u bgoal s , to h and craf t op erators , or to tail or th e
s ys tem anew f or each p robl em,
7. s cal es to ev er-l arger p robl ems ,
8. is cap abl e of p rod u cing res u l ts th at are comp etitiv e with th os e
p rod u ced by h u man p rogrammers , math ematicians , and s p e
cial is t d es igners or of p rod u cing res u l ts th at are p u bl is h abl e in
th eir own righ t or commercial l y u s abl e, and
9. is wel l -d ef ined , is rep l icabl e, h as no h id d en s tep s , and requ ires
no h u man interv ention d u ring th e ru n.
w
Genetic p rogramming is f u nd amental l y d if f erent f rom oth er ap
p roach es to artif icial intel l igence, mach ine l earning, ad ap tiv e s ys tems ,
au tomated l ogic, exp ert s ys tems , and neu ral networks in terms of
(i) its rep res entation (namel y, p rograms ), (ii) th e rol e of knowl ed ge
(none), (iii) th e rol e of l ogic (none), and (iv ) its mech anis m (gl eaned
f rom natu re) f or getting to a s ol u tion with in th e s p ace of p os s ibl e
s ol u tions .
A mong th es e f ou r d if f erences , rep res entation is p erh ap s th e mos t
imp ortant d is tingu is h ing f eatu re of genetic p rogramming. C omp u ters
are p rogrammed with comp u ter p rograms - and genetic p rogramming
creates comp u ter p rograms .
C omp u ter p rograms of f er th e f l exibil ity to p erf orm comp u tations
on v ariabl es of many d if f erent typ es , p erf orm iterations and recu r
s ions , s tore intermed iate res u l ts in d ata s tru ctu res of v ariou s typ es
(ind exed memory, matrices , s tacks , l is ts , rings , qu eu es ), p erf orm al
ternativ e cal cu l ations bas ed on th e ou tcome of comp l ex cal cu l ations ,
p erf orm op erations in a h ierarch ical way, and , mos t imp ortant, em
p l oy p arameterizabl e, reu s abl e, h ierarch ical l y cal l abl e s u bp rograms
(s u brou tines ) in ord er to ach iev e s cal abil ity.
I n attacking th e p robl em of au tomatic p rogramming, genetic p ro
gramming d oes not temp orize or comp romis e with s u rrogate s tru c
tu res s u ch as Horn cl au s es , p rep os itional l ogic, p rod u ction ru l es ,
f rames , d ecis ion trees , f ormal grammars , concep t s ets , concep tu al
cl u s ters , p ol ynomial coef f icients , weigh t v ectors , or binary s trings .
S ignif icantl y, h u man p rogrammers d o not commonl y regard any of
th e abov e s u rrogates as being s u itabl e f or p rogramming comp u ters .
I nd eed , we d o not s ee comp u ters being ord inaril y p rogrammed in th e
l angu age of any of th em.
My v iew is th at if we are real l y interes ted in getting comp u ters to
s ol v e p robl ems with ou t exp l icitl y p rogramming th em, th e s tru ctu res
th at we need are comp u ter p rograms .
Th is book will be coming ou t al mos t exactl y ten years s ince my
f irs t ru n of genetic p rogramming in O ctober 1987 (s ol v ing a p air of
l inear equ ations and ind u cing th e Fibonacci s equ ence). C ertainl y
I cou l d not h av e anticip ated th at th is f iel d wou l d h av e grown th e
way it h as wh en I th ou gh t of th e id ea of genetic p rogramming wh il e
f l ying ov er Greenl and on my retu rn from th e 1987 meeting of th e
I nternational Joint C onf erence on A rtif icial I ntel l igence in I tal y.
We know f rom Yogi Berra th at p red ictions are ris ky, p articu l arl y
wh en th ey inv ol v e th e f u tu re. Bu t, it is a good gu es s th at genetic
p rogramming wil l , in th e f u tu re, be s u cces s f u l l y exp and ed to greater
l ev el s of general ity and p ractical ity.
I n trying to id entif y f u tu re areas for p ractical ap p l ication, th e
p res ence of s ome or al l of th e f ollowing ch aracteris tics s h ou l d p rov id e
a good ind ication:
1. areas wh ere th e interrel ations h ip s among th e rel ev ant v ariabl es
are p oorl y u nd ers tood (or wh ere it is s u s p ected th at th e cu rrent
u nd ers tand ing may well be wrong),
2. areas wh ere f ind ing th e s ize and s h ap e of th e u l timate s ol u tion
to th e p robl em is a major p art of th e p robl em,
3. areas wh ere conv entional math ematical anal ys is d oes not, or
cannot, p rov id e anal ytic s ol u tions ,
4. areas wh ere an ap p roximate s ol u tion is accep tabl e (or is th e
onl y res u l t th at is ev er l ikel y to be obtained ),
5. areas wh ere s mal l imp rov ements in p erf ormance are rou tinel y
meas u red (or eas il y meas u rabl e) and h igh l y p rized ,
6. areas wh ere th ere is a l arge amou nt of d ata, in comp u ter read
abl e f orm, th at requ ires examination, cl as s if ication, and inte
gration (s u ch as mol ecu l ar biol ogy for p rotein and DNA se
qu ences , as tronomical d ata, s atel l ite obs erv ation d ata, f inancial
d ata, marketing trans action d ata, or d ata on th e Worl d Wid e
Web).
1 Genetic Programming
as Machine Learning
C ontents
1.1 Motivation 4
1.2 A Brief History of Machine Learning 7
1.3 Machine Learning as a Process 9
1.4 Major Issues in Machine Learning 12
1.5 Representing the Problem 12
1.5.1 What Is the Problem Representation? 12
1.5.2 Boolean Representations 14
1.5.3 Threshold Representations 17
1.5.4 Case-Based Representations 19
1.5.5 Tree Representations 20
1.5.6 Genetic Representations - 21
1.6 Transforming Solutions with
Search Operators 23
1.6.1 Generality/Specificity Operators 23
1.6.2 Gradient Descent Operators 24
1.6.3 Genetic Programming Operators 24
1.7 The Strategy of the Search 25
1.7.1 Blind Search 25
1.7.2 Hill Climbing 26
1.7.3 Beam Search 27
1.8 Learning 28
1.9 Conclusion 29
1 Genetic Programming as Machine Learning
E v ol u tion is Natu re's ijiis take. I ntel l igence is its ins is tence on mak
ing th e s ame mis take.
S .LE M, GO LE M XI V, 1981
1.1 Motivation
A u tomatic p rogramming wil l be one of th e mos t imp ortant areas
of comp u ter s cience res earch ov er th e next twenty years . Hard ware
s p eed and cap abil ity h as l eap t f orward exp onential l y.
(
Yet s of tware
cons is tentl y l ags years beh ind th e cap abil ities of th e h ard ware. Th e
gap ap p ears to be ev er increas ing. Demand for comp u ter cod e keep s
growing bu t th e p roces s of writing cod e is s til l mired in th e mod ern
d ay equ iv al ent of th e med iev al "gu il d " d ays . Like s word s in th e 15th
centu ry, mu s kets bef ore th e earl y 19th centu ry and books bef ore th e
p rinting p res s , each p iece of comp u ter cod e is , tod ay, h and mad e by
a craf ts man for a p articu l ar p u rp os e.
Th e h is tory of comp u ter p rogramming is a h is tory of attemp ts
to mov e away f rom th e "craf ts man" ap p roach - s tru ctu red p rogram
ming, object-oriented p rogramming, object l ibraries , rap id p rototyp
ing. Bu t each of th es e ad v ances l eav es th e cod e th at d oes th e real
work f irml y in th e h and s of a craf ts man, th e p rogrammer. Th e abil ity
to enabl e comp u ters to l earn to p rogram th ems el v es is of th e u tmos t
imp ortance in f reeing th e comp u ter ind u s try and th e comp u ter u s er
f rom cod e th at is obs ol ete bef ore it is rel eas ed .
S ince th e 1950s , comp u ter s cientis ts h av e tried , with v arying de
grees of s u cces s , to giv e comp u ters th e abil ity to l earn. Th e u mbrel l a
term for th is f iel d of s tu d y is "mach ine l earning," a p h ras e coined
in 1959 by th e f irs t p ers on wh o mad e a comp u ter p erf orm a s eriou s
l earning tas k, S amu el .
O riginal l y, S amu el u s ed "mach ine l earning" to mean comp u ters
p rogramming th ems el v es [S amu el , 1963]. Th at goal h as , for many
years , p rov en too d if f icu l t. S o th e mach ine l earning commu nity h as
p u rs u ed more mod es t goal s . A good contemp orary d ef inition of ma
ch ine l earning is d u e to Mitch el l : "[mach ine l earning] is th e s tu d y
of comp u ter al gorith ms th at imp rov e au tomatical l y th rou gh exp eri
ence" [Mitch el l , 1996].
Genetic p rogramming, GP for s h ort, as p ires to d o p recis el y th at
- to ind u ce a p op u l ation of comp u ter p rograms th at imp rov e au
tomatical l y as th ey exp erience th e d ata on wh ich th ey are trained .
A ccord ingl y, GP is p art of th e v ery l arge bod y of res earch cal l ed
mach ine l earning (ML).
With in th e mach ine l earning commu nity, it is common to u s e "ge
netic p rogramming" as a s h orth and for any mach ine l earning s ys tem
th at ev ol v es tree s tru ctu res . Th e f ocu s on tree s tru ctu res is real l y a
tribu te to th e immens e inf l u ence of Koza. I n 1992, h e wrote a treatis e
entitl ed "Genetic Programming. O n th e Programming of C omp u t
ers by Means of Natu ral S el ection." Bef ore th is work, a nu mber of
res earch ers h ad u s ed genetic or ev ol u tionary op erators to ind u ce com
p u ter p rograms . Bu t th es e earl ier works went l argel y u nrecognized
becau s e th ey were, in ef f ect, bu ried in th e mas s of genetic al gorith m
res earch . I n h is s eminal book, Koza was th e f irs t to recognize th at GP
was s ometh ing new and d if f erent - h e ev en gav e th e new d is cip l ine its
name. Koza's res u l ts were ach iev ed by ev ol v ing tree s tru ctu res . I t is
not s u rp ris ing, th eref ore, th at many u s e th e term "genetic p rogram
ming" to mean th e ev ol u tion of tree s tru ctu res , nor is it s u rp ris ing
th at mos t of th e work in th is d is cip l ine is with v ariou s tree-bas ed
s ys tems .
Th e d ef inition of GP u s ed in th is book wil l be l es s res trictiv e th an
th e d ef inition ref erred to abov e.
1. Firs t and f oremos t we wil l cons id er th e ind u ction of comp u ter
p rograms by ev ol u tionary means . A ccord ingl y, in th is book, th e
term "genetic p rogramming" s h al l incl u d e s ys tems th at con
s titu te or contain exp l icit ref erences to p rograms (execu tabl e
cod e) or to p rogramming l angu age exp res s ions . S o, for exam
p l e, ev ol v ing LI S P l is ts are cl earl y GP becau s e LI S P l is ts con
s titu te p rogramming l angu age s tru ctu res and el ements of th os e
l is ts cons titu te p rogramming l angu age exp res s ions . S imil arl y,
th e common p ractice among GP res earch ers of ev ol v ing C d ata
s tru ctu res th at contain inf ormation exp l icitl y ref erring to pro
grams or p rogram l angu age tokens wou l d al s o be GP.
2. I t is al read y cl ear from th e GP l iteratu re th at p rograms or
p rogramming l angu age s tru ctu res may be rep res ented in ways
oth er th an as trees . Res earch h as al read y es tabl is h ed th e effi
cacy of both l inear and grap h -bas ed genetic p rogramming sys
tems . Th eref ore, we d o not l imit ou r d ef inition of GP to incl u d e
onl y s ys tems th at u s e (exp res s ion) trees to rep res ent p rograms .
I ns tead , al l means of rep res enting p rograms wil l be incl u d ed .
3. Not al l al gorith ms ru nning on comp u ters are p rimaril y pro
grams . For examp l e, neu ral networks are (l earning) al gorith ms ,
bu t th eir imp l ementation is u s u al l y of s econd ary concern. Nev
erth el es s , we s h al l riot excl u d e th es e al gorith ms from being le
gitimate members of th e GP f amil y. Th ere al read y exis t nu
merou s ap p l ications in th e al gorith mic d omain, and excl u d ing
th em wou l d u nneces s aril y d ep riv e GP of an imp ortant s ou rce
of ins p iration.
1 Genetic Programming as Machine Learning
4. We d o not l imit ou r d ef inition of GP to incl u d e onl y s ys tems
th at u s e certain op erators , s u ch as cros s ov er. A s l ong as th ere
is a p op u l ation of p rograms or al gorith ms u s ed for th e benef it
of th e s earch , and as l ong as s ome kind of ind eterminis m is
ap p l ied to generate new v ariants , we th ink we can l egitimatel y
cal l a s ys tem a genetic p rogramming s ys tem.
With th e abov e d is cu s s ion in mind , it is p os s ibl e to d ef ine genetic
p rogramming as th e d irect ev ol u tion of p rograms or al gorith ms for th e
p u rp os e of ind u ctiv e l earning. Th u s , in a v ery real s ens e, GP retu rns
to S amu el 's original goal for mach ine l earning in 1959 - teach ing
comp u ters to p rogram th ems el v es .
Tod ay, we p rogram by tel l ing th e comp u ter exactl y h ow to d o
ev ery p os s ibl e th ing th at we th ink it migh t need to d o - h ow to
res p ond to ev ery p os s ibl e requ es t f rom a u s er or a network. Not
onl y is th is cu mbers ome, it is imp os s ibl e for s of tware p ackages th at
rou tinel y occu p y f if ty megabytes of h ard d is k s p ace. Th e great goal of
mach ine l earning, and es p ecial l y GP, is to be abl e to tel l th e comp u ter
wh at tas k we want it to p erf orm and to h av e it l earn to p erf orm th at
tas k. GP wou l d d o s o by l etting th e comp u ter p rogram its el f or oth er
comp u ters .
I s GP cap abl e of s u ch a f eat tod ay? I n a general s ens e, no. Th at
is , th ere is no GP s ys tem th at wil l generical l y accep t any p robl em
and th en au tomatical l y generate comp u ter cod e th at ad d res s es th at
p robl em. I t is cl earl y not a h u man p rogrammer. Notwith s tand ing
th is l imitation, in onl y a few s h ort years s ince th e p u bl ication of
Koza's book, GP h as al read y ch anged th e wis d om on th e range of
p robl ems mach ine l earning can s ol v e and h as equ al ed or exceed ed
th e p erf ormance of oth er mach ine l earning s ys tems in v ariou s s tu d
ies . I n f act, GP h as al read y ev ol v ed p rograms th at are better th an
th e bes t p rograms written by p eop l e to s ol v e a nu mber of d if f icu l t
engineering p robl ems . Final l y, GP h as introd u ced a l ev el of f reed om
of rep res entation into th e mach ine l earning worl d th at d id not p rev i
ou s l y exis t. Th at is wh y we u rge th e read er to l ook caref u l l y at th is
exciting and d ynamic new branch of comp u ter s cience.
Th is ch ap ter wil l d es cribe s ome of th e central is s u es in mach ine
l earning and wil l s h ow wh ere genetic p rogramming f its in. O u r p u r
p os e is not to d es cribe th e entire f iel d of ML exh au s tiv el y - th is
ch ap ter wil l p aint with a v ery broad bru s h . Rath er, we intend to
p l ace GP in th e context of th e ov eral l f iel d .
1
1
A good general d is cu s s ion of artif icial intel l igence, mach ine learn
ing, and genetic p rogramming's p l ace in mach ine l earning is contained in
[A ngel ine, 1994].
;:
We wil l begin with a brief h is tory of mach ine l earning f rom th e
1950s u ntil th e p res ent. A f ter th at, we wil l l ook at mach ine l earning
as a process. Th is process is remarkabl y s imil ar from one mach ine
l earning p arad igm to anoth er. Moreov er, u nd ers tand ing th is p roces s
will be es s ential to u nd ers tand ing GP its el f . Final l y, we wil l examine
s ome of th e d etail s of th e mach ine l earning p roces s . I t is in th e d etail s
th at mach ine l earning p arad igms d iv erge and genetic p rogramming
becomes qu ite d is tinctiv e.
1.2 A Brief History of Machine Learning
A l th ou gh genetic p rogramming is a rel ativ e newcomer to th e worl d of
mach ine l earning, s ome of th e earl ies t mach ine l earning res earch bore
a d is tinct res embl ance to tod ay's GP. I n 1958 and 1959, Fried berg
attemp ted to s ol v e f airl y s imp l e p robl ems by teach ing a comp u ter to
write comp u ter p rograms [Fried berg, 1958] [Fried berg et al ., 1959].
Fried berg's p rograms were 64 ins tru ctions l ong and were abl e to
manip u l ate, bitwis e, a 64-bit d ata v ector. E ach ins tru ction h ad a
v irtu al "op cod e" and two op erand s , wh ich cou l d ref erence eith er th e
d ata v ector or th e ins tru ctions . A n ins tru ction cou l d ju mp to any
oth er ins tru ction or it cou l d manip u l ate any bit of th e d ata v ector.
Fried berg's s ys tem l earned by u s ing wh at l ooks a l ot l ike a mod ern
mu tation op erator - rand om initial ization of th e ind iv id u al s ol u tions
and rand om ch anges in th e ins tru ctions .
Fried berg's res u l ts were l imited . Bu t h is th inking and v is ion were
not. Here is h ow Fried berg f ramed th e central is s u e of mach ine learn
ing:
If we are ev er to make a mach ine th at will s p eak, u nd ers tand
or trans l ate h u man l angu ages , s olv e math ematical p robl ems with
imagination, p ractice a p rof es s ion or d irect an organization, eith er
we mu s t red u ce th es e activ ities to a s cience s o exact th at we can
tel l a mach ine p recis el y h ow to go abou t d oing th em or we mu s t
d ev elop a mach ine th at can d o th ings with ou t being tol d p recis el y
h ow... . Th e mach ine migh t be d es igned to grav itate toward th os e
p roced u res wh ich mos t of ten el icit from u s a f av orabl e res p ons e.
We cou l d teach th is mach ine to p erf orm a tas k ev en th ou gh we
cou l d not d es cribe a p recis e meth od for p erf orming it, p rov id ed
only th at we u nd ers tood th e tas k well enou gh to be abl e to as
certain wh eth er or not it h ad been d one s u cces s f u lly. . . . I n s h ort,
al th ou gh it migh t l earn to p erf orm a tas k with ou t being tol d pre
cis ely h ow to p erf orm it, it wou ld s til l h av e to be tol d p recis el y
how to l earn.
R.M. FRI E DBE RG, 1958
Fried berg's anal ys is anticip ated th e coming s p l it between th e ar
tif icial intel l igence commu nity (with its emp h as is on exp ert kn owl
edge) and mach ine l earning (with its emp h as is on learn in g). Ju s t
a few years af ter Pried berg's work, ML took a back s eat to exp ert
knowl ed ge s ys tems . I n f act, artif icial intel l igence (A I ) res earch , th e
s tu d y of d omain-knowl ed ge and knowl ed ge s ys tems , was th e d omi
nant f orm of comp u tational intel l igence d u ring th e 1960s and 1970s .
E xp ert s ys tem d omain-knowl ed ge in th is era was general l y h u man
knowl ed ge encod ed into a s ys tem. For examp l e, an exp ert s ys tem
migh t be d ev el op ed by p ol l ing h u man exp erts abou t h ow th ey make
p articu l ar kind s of d ecis ions . Th en, th e res u l ts of th at p ol l ing wou l d
be encod ed into th e exp ert s ys tem for u s e in making real -worl d d eci
s ions .
Th e typ e of intel l igence rep res ented by s u ch exp ert s ys tems was
qu ite d if f erent from mach ine l earning becau s e it d id not l earn from
exp erience. I n p arap h ras ing Fried berg's terms , A I exp ert s ys tems
attemp t to red u ce p erf orming s p ecif ic tas ks ". . . to a s cience s o exact
th at we can tel l a mach ine p recis el y h ow to go abou t d oing th em"
[Fried berg, 1958].
Th e exp ert s ys tem ap p roach , in th e 1960s and th ereaf ter, h as h ad
many s u cces s es , incl u d ing:
MYC I N - Diagnos is of I nf ectiou s Dis eas es
MO LE - Dis eas e Diagnos is
PRO S PE C TO R - Mineral E xp l oration A d v ice
DE S I GN A DVI S O R - S il icon C h ip Des ign A d v ice
Rl - C omp u ter C onf igu ration
Notwith s tand ing th is s u cces s , exp ert s ys tems h av e tu rned ou t
to be brittl e and to h av e d if f icu l ty h and l ing inp u ts th at are nov el
or nois y. A s a res u l t, in th e 1970s , interes t in mach ine l earning
reemerged . A ttention s h if ted from th e s tatic qu es tion of h ow to rep
res ent knowl ed ge to th e d ynamic qu es t for h ow to acqu ire it. I n s h ort,
th e s earch began in earnes t to f ind a way, in Fried berg's word s , to
tel l a comp u ter "p recis el y h ow to l earn."
By th e earl y 1980s , mach ine l earning was recognized as a d is tinct
s cientif ic d is cip l ine. S ince th en, th e f iel d h as grown tremend ou s l y.
S ys tems now exis t th at can, in narrow d omains , l earn from exp erience
and make u s ef u l p red ictions abou t th e worl d . Tod ay, mach ine learn
ing is f requ entl y an imp ortant p art of real -worl d ap p l ications s u ch
as ind u s trial p roces s control , robotics control , time s eries p red iction,
p red iction of cred itworth ines s , and p attern recognition p robl ems s u ch
as op tical ch aracter recognition and v oice recognition, to name bu t a
few examp l es [Wh ite and S of ge, 1992] [Bieth ah n and Nis s en, 1995].
A t th e h igh es t l ev el , any mach ine l earning s ys tem f aces a s imil ar
tas k - h ow to l earn f rom its exp erience of th e env ironment. Th e
process of mach ine l earning, th at is , th e d ef ining of th e env ironment
and th e tech niqu es for l etting th e mach ine l earning s ys tem exp erience
th e env ironment for both training and ev al u ation, are s u rp ris ingl y
s imil ar from s ys tem to s ys tem. I n th e next s ection of th is ch ap ter,
we s h al l , th eref ore, f ocu s on mach ine l earning as a high-level process.
I n d oing s o, we wil l s ee wh at many ML p arad igms h av e in common.
O n th e one h and , many s u cces s f u l mach ine l earning p arad igms
s eem rad ical l y d is s imil ar in h ow th ey l earn from th e env ironment.
For examp l e, giv en th e s ame env ironment s ome mach ine l earning
s ys tems l earn by ind u cing conju nctiv e or d is ju nctiv e Bool ean net
works (s ee S ection 1.5.2). Th e imp l icit as s u mp tion of s u ch s ys tems is
th at th e worl d may be mod el ed in f ormal A ris totel ian and Bool ean
terms . O n th e oth er h and , connectionis t s ys tems s u ch as f u zzy ad ap
tiv e or neu ral networks create mod el s of th e s ame env ironment bas ed
(l oos el y) on biol ogical nerv ou s s ys tems . Th ey regard th e worl d as
non-l inear, h igh l y comp l ex, and d ecid ed l y non-A ris totel ian (s ee Sec
tion 1.5.3). Th e v ariety d oes not end th ere becau s e v ariou s s ys tems
al s o s earch th rou gh p os s ibl e s ol u tions in d if f erent ways . For exam
p l e, bl ind s earch , beam s earch , and h il l cl imbing are p rincip al s earch
p arad igms (s ee S ection 1.6). E ach may be broken into many s u bd is -
cip l ines and each h as grown ou t of d if f erent p h il os op h ies abou t h ow
l earning works , and ind eed , wh at l earning is .
A ccord ingl y, l ater in th is ch ap ter we s h al l ov erv iew th e ways in
wh ich mach ine l earning s ys tems are d is tinct from each oth er. I n oth er
word s , we wil l l ook at th e d etail s of h ow d if f erent mach ine l earning
s ys tems attack th e p robl em of l earning.
1.3 Machine Learning as a Process
Mach ine l earning is a p roces s th at begins with th e id entif ication of
th e l earning d omain and end s with tes ting and u s ing th e res u l ts of
th e l earning. I t wil l be u s ef u l to s tart with an ov erv iew of h ow a
mach ine l earning s ys tem is d ev el op ed , trained , and tes ted . Th e key
p arts of th is p roces s are th e "l earning d omain," th e "training s et," th e
"l earning s ys tem," and "tes ting" th e res u l ts of th e l earning p roces s .
Th is ov eral l process of mach ine l earning is v ery imp ortant for th e
read er to u nd ers tand and we u rge s p ecial attention in th is s ection if
th e read er is not al read y f amil iar with th e s u bject matter.
Mach ine l earning s ys tems are u s u al l y ap p l ied to a "l earning d o-
main." A l earning d omain is any p robl em or s et of f acts wh ere th e
res earch er is abl e to id entif y "f eatu res " of th e d omain th at may be
meas u red , and a res u l t or res u l ts (f requ entl y organized as "cl as s es ")
th e res earch er wou l d l ike to p red ict. For examp l e, th e s tock market
may be th e ch os en d omain, th e cl os ing S &P ind ex
2
for th e p as t 30
d ays may be th e f eatu res of th e d omain s el ected by th e res earch er,
and th e cl os ing S &P ind ex tomorrow may be th e res u l t th at th e re
s earch er wants to p red ict. O f cou rs e, th e f eatu res (p as t ind ex v al u es )
ou gh t to be rel ated in s ome manner to th e d es ired res u l t (th e f u tu re
ind ex v al u e). O th erwis e, a mach ine l earning s ys tem bas ed on th es e
f eatu res wil l h av e l ittl e p red ictiv e p ower.
I n th e GP worl d , a "f eatu re" wou l d more l ikel y be ref erred to as
an "inp u t" and th e "cl as s " wou l d more l ikel y be ref erred to as th e
"ou tp u t." Th es e are mos tl y d if f erences of terminol ogy.
3
Regard l es s of
terminol ogy, once th e f eatu res (inp u ts ) are ch os en f rom th e l earning
d omain, th ey d ef ine th e ov eral l d imens ions of th e env ironment th at
th e ML s ys tem wil l exp erience and f rom wh ich it wil l (h op ef u l l y)
l earn.
Bu t th e s el ection of f eatu res (inp u ts ) d oes not comp l etel y d ef ine
th e env ironment f rom wh ich th e s ys tem wil l l earn. Th e res earch er
mu s t al s o ch oos e s p ecif ic p as t examp l es f rom th e l earning d omain.
E ach examp l e s h ou l d contain d ata th at rep res ent one ins tance of
th e rel ations h ip between th e ch os en f eatu res (inp u ts ) and th e cl as s es
(ou tp u ts ). Th es e examp l es are of ten ref erred to as "training cas es "
or "training ins tances ." I n GP, th ey are cal l ed "f itnes s cas es ." Col
l ectiv el y, al l of th e training ins tances are ref erred to as th e "training
s et." O nce th e training s et is s el ected , th e l earning env ironment of
th e s ys tem h as been d ef ined .
Mach ine l earning occu rs by training. A n ML s ys tem goes th rou gh
th e training s et and attemp ts to l earn f rom th e examp l es . I n GP, th is
means th at th e s ys tem mu s t l earn a comp u ter p rogram th at is abl e
to p red ict th e ou tp u ts of th e training s et f rom th e inp u ts . I n more
trad itional mach ine l earning terminol ogy, GP mu s t f ind a comp u ter
p rogram th at can p red ict th e cl as s f rom th e f eatu res of th e l earning
d omain.
Final l y, th e res earch er mu s t ap p rais e th e qu al ity of th e l earning
th at h as taken p l ace. O ne way to ap p rais e th e qu al ity of l earning is
2
A l ead ing s tock market ind icator in th e United S tates .
3
Th e u s e of th e term "cl as s " is actu al l y d u e to th e h is toric f ocu s of
mains tream mach ine l earning on cl as s if ication p robl ems . We will main
tain th at terminol ogy h ere for s imp l icity. Both GP and many oth er ML
p arad igms are al s o cap abl e of d eal ing with d omains th at requ ire nu meric
ou tp u t for p robl ems th at are not cl as s if ication p robl ems . I n th is cas e, th e
terminol ogy wou ld be p robl em s p ecif ic.
to tes t th e abil ity of th e bes t s ol u tion of th e ML s ys tem to p red ict
ou tp u ts f rom a "tes t s et." A tes t s et is comp ris ed of inp u ts and
ou tp u ts from th e s ame d omain th e s ys tem trained u p on. A l th ou gh
from th e s ame d omain, th e tes t s et contains d if f erent examp l es th an
th e training s et. Th e abil ity of a s ys tem to p red ict th e ou tp u ts of
th e tes t s et is of ten ref erred to as "general ization," th at is , can th e
l earned s ol u tion gen eralize to new d ata or h as it ju s t memorized th e
exis ting training s et? Mu ch of C h ap ter 8 is d ev oted to th is v ery
imp ortant is s u e. Th ere, we s h al l al s o s ee th at u s ing a training s et
and a tes t s et onl y ov ers imp l if ies th e p robl em of general ization.
A n examp l e migh t be u s ef u l h ere: th e "I ris d ata s et."
4
Th e I ris
d ata s et p res ents a "cl as s if ication" p robl em - th at is , th e ch al l enge
is to l earn to id entif y th e class of I ris to wh ich a p h otograp h of a
p articu l ar iris p l ant bel ongs . Th e s et its el f is bas ed on a s amp l e of
150 d if f erent p h otograp h s of iris es . Th e p h otos rep res ent iris es f rom
th ree d if f erent cl as s es - cl as s 0 is Iris Setosa, cl as s 1 is Iris Versicolour,
and cl as s 2 is Iris Virgin ica. Th e d ata s et its el f is comp ris ed of
meas u rements mad e f rom th es e 150 p h otos .
Th e l earning d omain is , in th is examp l e, al l p h otos of iris es of
th es e th ree typ es . Th e 150 p h otos are not th e l earning d omain -
th ey are ju s t s p ecif ic examp l es d rawn from th e d omain. Wh en th e
res earch er ch os e wh at meas u rements to make off th e p h otos , h e or
s h e id entif ied th e f eatu res of th e d omain. Here are th e inp u ts (or
f eatu res ) th at were ch os en:
Q I np u t 1. S ep al l ength in cm.
Q I np u t 2. S ep al wid th in cm.
Q I np u t 3. Petal l ength in cm.
Q I np u t 4. Petal wid th in cm.
Th ere is , of cou rs e, a v al u e for each of th es e inp u ts in each of th e 150
training ins tances .
Th e 150 ins tances are th en d iv id ed into two grou p s , a training
s et and a tes t s et. A t th is p oint, a mach ine l earning s ys tem is giv en
acces s to th e training d ata and its training al gorith m is execu ted .
4
A word of cau tion: th e I ris d ata s et is of ten ref erred to in th e mach ine
l earning l iteratu re as a "cl as s ic." Th is may imp l y to th e read er th at it
migh t be a good id ea actu al l y to u s e th e I ris d ata to tes t an ML s ys tem.
Howev er, th e I ris d omain is triv ial l y s imp l e, at l eas t for GP, and its u s e
as a tes t of ML s ys tems is d is cou raged [Francone et al ., 1996]. We u s e
th e examp l e in th e text onl y becau s e it is a s imp l e examp l e of a l earning
d omain.
Th e goal in training is to take th e s ep al and p etal meas u rements (th e
f eatu res ) in th e training s et and to l earn to p red ict wh ich of th e th ree
cl as s es a p articu l ar iris bel ongs to. Not onl y mu s t th e s ys tem p red ict
th e cl as s of I ris for th e training s et, it s h ou l d al s o be abl e to d o s o
for th e tes t s et in a manner th at is s tatis tical l y s ignif icant.
With th is ov erv iew of th e p roces s of mach ine l earning in p l ace,
we can now l ook at s ome of th e d etail s of l earning for v ariou s mach ine
l earning p arad igms .
1.4 Major Issues in Machine Learning
Until th is time, th e manner in wh ich l earning occu rs h as been ignored
s o th at we cou l d f ocu s on is s u es common to al l ML s ys tems . Bu t
th e ch oices mad e in d es igning a l earning al gorith m are cru cial . Th e
l earning al gorith m d ef ines th e s ys tem in wh ich it is u s ed more th an
any oth er s ingl e f actor. Not onl y th at, th e l earning al gorith m is wh ere
ML s ys tems d iv erge. GP s ys tems u s e a l earning al gorith m bas ed on
an anal ogy with natu ral ev ol u tion. "Mu l til ayer f eed f orward neu ral
networks " are bas ed on an anal ogy with biol ogical nerv ou s s ys tems .
Bayes /Parzen s ys tems are bas ed on s tatis tics .
Th ere are many ways to cl as s if y l earning al gorith ms . Here, we
wil l cl as s if y th em by h ow th ey ans wer th e f ol l owing f ou r qu es tions
abou t th e "h ow to" of l earning:
1. How are s ol u tions rep res ented in th e al gorith m?
2. Wh at s earch op erators d oes th e l earning al gorith m u s e to mov e
in th e s ol u tion s p ace?
3. Wh at typ e of s earch is cond u cted ?
4. I s th e l earning s u p erv is ed or u ns u p erv is ed ?
E ach of th es e f ou r qu es tions rais es imp ortant and s ometimes con
tentiou s is s u es for l earning al gorith m d es ign. I n l ooking at s ome of
th e d if f erent ways in wh ich d if f erent ML s ys tems h av e ans wered th es e
qu es tions , th e p l ace of GP in mach ine l earning wil l become cl earer.
1.5 Representing the Problem
1.5.1 What Is the Problem Representation?
A n ML s ys tem's p robl em rep res entation is its d ef inition of wh at pos
s ibl e s ol u tions to th e p robl em l ook l ike - wh at kind s of inp u ts d o
th e s ol u tions accep t, h ow d o th ey trans f orm th e inp u ts , h ow d o th ey
Th e f ou r au th ors are to be congratu l ated on p rod u cing a f ine
book and th e read er will be reward ed by read ing it.
John R. Koza
S tanf ord Univ ers ity
Ju l y 8, 1997
Contents
Foreword by John R. Koza vii
Preface xv
Acknowledgments xix
I Prerequisites of Genetic Programming 1
1 Genetic Programming as Machine Learning 3
1.1 Motivation 4
1.2 A Brief History of Machine Learning 7
1.3 Machine Learning as a Process 9
1.4 Major Issues in Machine Learning 12
1.5 Representing the Problem 12
1.6 Transforming Solutions with
Search Operators 23
1.7 The Strategy of the Search 25
1.8 Learning 28
1.9 Conclusion 29
2 Genetic Programming and Biology 33
2.1 Minimal Requirements
for Evolution to Occur 35
2.2 Test Tube Evolution - A Study
in Minimalist Evolution 35
2.3 The Genetic Code - DNA as a Computer Program 39
2.4 Genomes, Phenomes, and Ontogeny 45
2.5 Stability and Variability of
Genetic Transmission 48
2.6 Species and Sex 53
3 Computer Science and Mathematical Basics 57
3.1 The Importance of Randomness
in Evolutionary Learning 58
3-2 Mathematical Basics 60
3.3 Computer Science Background
and Terminology 67
3.4 Computer Hardware 72
3.5 Computer Software 76
4 Genetic Programming as Evolutionary Computation . . 87
4.1 The Dawn of Genetic Programming
Setting the Stage 88
4.2 Evolutionary Algorithms:
The General View 91
4.3 Flavors of Evolutionary Algorithms 95
4.4 Summary of Evolutionary Algorithms 102
II Genetic Programming Fundamentals 105
5 Basic Concepts The Foundation 107
5.1 Terminals and Functions - The Primitives of Genetic Pro
grams 109
5.2 Executable Program Structures 112
5.3 Initializing a GP Population 118
5.4 Genetic Operators 122
5.5 Fitness and Selection 126
5.6 The Basic GP Algorithm 133
5.7 An Example Run 135
6 Crossover The Center of the Storm 143
6.1 The Theoretical Basis for the
Building Block Hypothesis in GP 145
6.2 Preservation and Disruption of Building
Blocks: A Gedanken Experiment 148
6.3 Empirical Evidence of Crossover Effects 151
6.4 Improving Crossover - The Argument
from Biology 156
6.5 Improving Crossover - New Directions 158
6.6 Improving Crossover - A Proposal 166
6.7 Improving Crossover - The Tradeoffs 169
6.8 Conclusion 170
7 Genetic Programming and Emergent Order 175
7.1 Introduction 176
7.2 Evolution of Structure and
Variable Length Genomes 177
7.3 Iteration, Selection, and Variable Length
Program Structures 179
7.4 Evolvable Representations 180
7.5 The Emergence of Introns,
Junk DNA, and Bloat 181
7.6 Introns in GP Defined 185
7.7 Why GP Introns Emerge 187
7.8 Effective Fitness and Crossover 188
7.9 Effective Fitness and Other Operators 190
7.10 Why Introns Grow Exponentially 191
7.11 The Effects of Introns 194
7.12 What to Do about Introns 199
8 Analysis Improving Genetic Programming with Statis
tics 203
8.1 Statistical Tools for GP 205
8.2 Offline Preprocessing and Analysis 209
8.3 Offline Postprocessing 216
8.4 Analysis and Measurement of Online Data 219
8.5 Generalization and Induction 229
8.6 Conclusion 235
III Advanced Topics in Genetic Programming 237
9 Different Varieties of Genetic Programming 239
9.1 GP with Tree Genomes 240
9.2 GP with Linear Genomes 243
9.3 GP with Graph Genomes 265
9.4 Other Genomes 267
10 Advanced Genetic Programming 277
10.1 Improving the Speed of GP 279
10.2 Improving the Evolvability of Programs 282
10.3 Improving the Power of GP Search 299
11 Implementation Making Genetic Programming Work 309
11.1 Why Is GP so Computationally Intensive? 310
11.2 Computer Representation
of Individuals 314
11.3 Implementations Using LISP 316
11.4 Some Necessary Data Structures 319
11.5 Implementations Wi th Arrays or Stacks 325
11.6 Implementations Using Machine Code 330
11.7 A Guide to Parameter Choices 334
12 Applications of Genetic Programming 339
12.1 General Overview 340
12.2 Applications from A to Z 340
12.3 Science-Oriented Applications of GP 341
12.4 Computer Science-Oriented
Applications 354
12.5 Engineering-Oriented Applications of GP 363
12.6 Summary 376
13 Summary and Perspectives 379
13.1 Summary 380
13.2 The Future of Genetic Programming 381
13.3 Conclusion 383
A Printed and Recorded Resources 385
A. I Books on Genetic Programming 385
A.2 GP Video Tapes 386
A.3 Books on Evolutionary Algorithms 386
A.4 Selected Journals 387
B Information Available on the Internet 389
B.I GP Tutorials 389
B.2 GP Frequently Asked Questions 389
B.3 GP Bibliographies 389
B.4 GP Researchers 390
B.5 General Evolutionary Computation 390
B.6 Mailing Lists 390
C GP Software 393
C.I Public Domain GP Systems 393
C.2 Commercial GP Software 394
C.3 Related Software Packages 394
C.4 C++ Implementation Issues 394
D Events 395
D.I GP Conferences 395
D.2 Related Conferences and Workshops 395
Bibliography 399
Person Index 445
Subject Index 451
Preface
Wh en we f irs t conceiv ed of th is text, we were concerned it migh t be
too earl y for s u ch an u nd ertaking. A f ter al l , genetic p rogramming
(GP) h ad grown v ery rap id l y in th e few years s ince 1992. Wou l d not
s u ch a you ng d is cip l ine be mu ch too f l u id for being p inned d own in
a text book? Th e p u bl is h ed l iteratu re in th e f iel d is d iv ers e. Differ
ent ap p roach es to genetic p rogramming manif es t v arying d egrees of
comp l exity. Final l y, th ere are no f irml y es tabl is h ed p arad igms th at
cou l d s erv e as gu id e p os ts .
A t th e s ame time, h owev er, we cou l d not es cap e th e imp res s ion
th at genetic p rogramming h ad accu mu l ated enou gh real s u bs tance for
a s ys tematic ov erv iew to be of u s e to th e s tu d ent, to th e res earch er,
and to engineers interes ted in real -worl d ap p l ications of th is f iel d . S o
we p roceed ed d es p ite th e rel ativ e newnes s of genetic p rogramming.
Th e res u l ts of ou r ef f ort can be s een h ere.
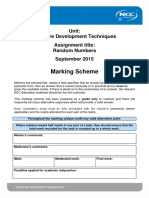
We h av e written th is text for more th an one au d ience. A ccord
ingl y, th e book h as many entry p oints , d ep end ing on th e l ev el of
knowl ed ge th e read er brings to th e tabl e (s ee Figu re 1).
Th e text's core is d iv id ed into th ree p arts with f ou r ch ap ters each .
Wh ere ap p rop riate, a ch ap ter end s with exercis es and recommend a
tions for f u rth er read ing.
Q Part I d es cribes f u nd amental s we regard as p rerequ is ites to a
d eep er u nd ers tand ing of genetic p rogramming. Th is p art is
intend ed to s et th e grou nd work for ou r main th eme with ou t
actu al l y d es cribing genetic p rogramming in d etail . Wh il e th e
ch ap ters in th is p art are recommend ed for newcomers to genetic
p rogramming, th ey s h ou l d al s o contain u s ef u l inf ormation for
read ers wh o are more f amil iar with th e f iel d .
A s a general introd u ction we recommend C h ap ter 1. Th is ch ap
ter s h ou l d al s o s erv e well for th os e read ers wh o s eek a better
u nd ers tand ing of h ow genetic p rogramming f its into th e ov eral l
d is cip l ine of mach ine l earning. C h ap ter 2 s h ou l d be of imp or
tance to read ers interes ted in th e connection between genetic
Figure 1
Navigating the book.
Italic text indicates entry
points.
p rogramming, ev ol u tion, d ev el op ment, and mol ecu l ar biol ogy.
C h ap ter 3 offers backgrou nd in as p ects of math ematics and
comp u ter s cience th at are imp ortant in genetic p rogramming,
wh il e C h ap ter 4 p rov id es a general d es crip tion of th e f iel d of
ev ol u tionary comp u tation, of wh ich genetic p rogramming is a
p art. E ach of th es e ch ap ters may be read s ep aratel y, d ep end ing
on th e backgrou nd and interes ts of th e read er.
Preface
Q Part I I is central to th is book. C h ap ter 5 introd u ces th ree ba
s ic p arad igms of genetic p rogramming - tree, l inear and grap h
bas ed s ys tems - wh il e th e remaining ch ap ters introd u ce and
anal yze th e imp ortant p robl ems in th e f iel d . Read ers wh o al
read y h av e bas ic knowl ed ge migh t want to s tart with C h ap ter
5 d irectl y.
C h ap ter 6, 7 and 8 f ocu s on p rominent u ns ol v ed is s u es in gene
tic p rogramming, s u ch as th e effect and p ower of th e cros s ov er
op erator, introns , genetic p rogramming as an emergent s ys tem,
and many oth ers . Th es e th ree ch ap ters s h ou l d be read sequ en
tial l y and onl y by th os e with a f irm u nd ers tand ing of th e bas ics
of genetic p rogramming d es cribed in C h ap ter 5. I n ad d ition, we
emp h as ize th at th e material s in C h ap ter 6 to C h ap ter 8 wou l d
bes t be u nd ers tood by a read er well v ers ed in th e p rincip l es of
ev ol u tion and mol ecu l ar biol ogy d es cribed in C h ap ter 2. I t is ,
h owev er, p os s ibl e to s kip C h ap ter 6 to C h ap ter 8 in th e f irs t
p as s th rou gh th e book and nev erth el es s h av e th e backgrou nd
to mov e on to Part I I I .
Q Part I I I offers material for read ers f amil iar with genetic p ro
gramming and comp ris es a more s u bjectiv e s el ection of top ics .
C h ap ter 9 p rov id es a d etail ed l ook at v ariou s genetic p rogram
ming s ys tems , f ol l owed in C h ap ter 10 by a d is cu s s ion of ad
v anced tech niqu es to imp rov e th e bas ic al gorith m. C h ap ter 11
d is cu s s es imp ortant imp l ementation is s u es . A s s u ch , it is a pos
s ibl e s tarting p oint for comp u ter s cientis ts wh o want to exp l ore
genetic p rogramming from a tech nical p ers p ectiv e. C h ap ter 12
d es cribes an - ad mitted l y s u bjectiv e and incomp l ete - s p ectru m
of ap p l ications to wh ich genetic p rogramming h as al read y been
ap p l ied with at least s ome d egree of s u cces s . E ngineers f amil iar
with genetic p rogramming migh t want s tart with th is ch ap ter
and th en d iges t oth er p arts of th e book at th eir l eis u re.
Q Fou r ap p end ices s u mmarize v al u abl e res ou rces av ail abl e for th e
read er: A p p end ix A contains p rinted and record ed res ou rces ,
A p p end ix B s u gges ts web-rel ated res ou rces , A p p end ix C dis
cu s s es GP s of tware tool s , incl u d ing Dis cip u l u s "", th e GP soft
ware d ev el op ed by th e au th ors , and A p p end ix D mentions ev ents
mos t cl os el y rel ated to th e f iel d of genetic p rogramming. URLs
can be f ou nd onl ine at h ttp ://www.mkp .com/GP-I ntro.
I t took u s ap p roximatel y two years to comp l ete th is p roject. Con
s id ering th at two of th e au th ors liv e in Germany, one in S wed en, and
one in th e United S tates of A merica, ou r col l aboration was remark
abl y s mooth . Du ring th at time, th e f ou r of u s met onl y twice in
p ers on. I ns tead , we mad e h eav y u s e of th e I nternet. A s id e from ou r
co-au th ors , ou r mos t f requ ent "p rof es s ional " comp anions d u ring th e
p as t two years were e-mail , FTP, TE LNE T and th e Worl d Wid e Web.
I t wou l d be f air to s ay th at th is book wou l d p robabl y not exis t h ad
it not been catal yzed by mod ern commu nications tech nol ogy.
C oop erating th is way is not atyp ical of wh at is h ap p ening in many
newl y emerging f ield s in s cience and tech nol ogy. We are conv inced
th at el ectronic means for col l aboration greatl y accel erate th e p ace of
p rogres s in th e p articu l ar f ield s inv ol v ed . A s for th is book, we h op e
th at read ers from al l ov er th e worl d will f ind it both u s ef u l and enjoy
abl e. May genetic p rogramming continu e to th riv e on international
coop eration.
Wolfgan g Ban zhaf Peter Nordin
Dortmu nd , Germany Goeteborg, S wed en
Robert E. Keller Fran k D. Fran con e
Dortmu nd , Germany O akl and , C al if ornia
A u gu s t 1997
Acknowledgments
Firs t and f oremos t, we wou l d l ike to exp res s ou r gratitu d e to
Joh n R. Koza from S tanf ord Univ ers ity, C al if ornia, for inv es ting a
s ignif icant amou nt of h is time rev iewing th e text and for writing h is
f oreword to th is book.
We are f u rth er ind ebted to Peter J. A ngel ine, Marku s Brameier,
Marku s C onrad s , Jas on M. Daid a, Brian Dil kes , Jiirgen Fried rich ,
Dav id E . Gol d berg, Larry Gritz, Fred eric Gru au , James K. Harm, Ul -
rich Hermes , A u gu s t Lu d v iks on, Hol ger Kemp er, Th ors ten Mich ael is ,
S tef an Mintert, Kath y Nel ton, Wil l iam F. Pu nch , Hil mar Rau h e,
Mich ael L. Raymer, Ju s tinian P. Ros ca, Lee S p ector. A s tro Tel l er,
and Mich ael Wal p er for th eir h el p with v ariou s s tages of p rod u cing
th is book.
We are v ery gratef u l to th e f riend l y team at ou r German p u bl is h er
dpun kt, Mich ael Barabas , Ul rike Meu er, C h ris ta Preis end anz, Ger
h ard Ros s bach , and Maren S eyf ah rt, to A nd rew Ros s , ou r cop y edi
tor, and to Mich ael Morgan and th e wond erf u l s taf f at ou r U.S . p u b
l is h er Morgan Kaufman n in S an Francis co, es p ecial l y Maril yn A l an,
E l is abeth Bel l er, C yd Harrel l , Patricia Kim, and Yonie O v erton, for
making th is book p os s ibl e.
Wh il e th e abov e-mentioned p ers ons h av e mu ch contribu ted to
th is book, onl y th e au th ors cl aim res p ons ibil ity for th e mis takes th at
may h av e s neaked into th e f inal p rod u ct. A ny s u gges tions for im
p rov ement are mos t wel come.
We al s o wou l d l ike to acknowl ed ge th at we mad e u s e of LaTeX
for typ es etting u nd er th e dpun kt s tyl e. I t is amazing wh at LaTeX
can d o if one keep s tal king to it in a f riend l y manner; it is equ al l y
amazing wh at one can d o af ter s ome time if M^X keep s res p ond ing
in u nf riend l y ways . Figu res were incorp orated by u s ing th e EPSFIG
p ackage. Th e contents tabl es at th e beginning of each ch ap ter were
generated by th e MINITOC p ackage. Prod u cing many ind exes , l ike th is
book's p ers on and s u bject ind ex, is eas il y d one by u s ing th e MULTIND
p ackage. S ome of th e tree f igu res were d es igned with th e DAVlNCi
v is u al ization tool . Mos t f igu res were d one with ISLA NoDRA W, XFI G,
and GNUPLO T. Pos tp roces s ing of certain f igu res was accomp l is h ed
u s ing xv and ISLANDDRAW.
Th e Deu ts ch e Fors ch u ngs gemeins ch af t (DFG) p rov id ed s u p p ort
u nd er grant Ba 1042/5-1 and with in th e S ond erf ors ch u ngs bereich
Computation al In telligen ce u nd er grant S FB 531 - B2. A s abbat
ical s tay of W.B. at th e I nternational C omp u ter S cience I ns titu te,
UC Berkel ey, C A was v ery h el p f u l in th e l as t s tage of th is p roject.
1 Genetic Programming
as Machine Learning
C ontents
1.1 Motivation 4
1.2 A Brief History of Machine Learning 7
1.3 Machine Learning as a Process 9
1.4 Major Issues in Machine Learning 12
1.5 Representing the Problem 12
1.5.1 What Is the Problem Representation? 12
1.5.2 Boolean Representations 14
1.5.3 Threshold Representations 17
1.5.4 Case-Based Representations 19
1.5.5 Tree Representations 20
1.5.6 Genetic Representations - 21
1.6 Transforming Solutions with
Search Operators 23
1.6.1 Generality/Specificity Operators 23
1.6.2 Gradient Descent Operators 24
1.6.3 Genetic Programming Operators 24
1.7 The Strategy of the Search 25
1.7.1 Blind Search 25
1.7.2 Hill Climbing 26
1.7.3 Beam Search 27
1.8 Learning 28
1.9 Conclusion 29
1 Genetic Programming as Machine Learning
E v ol u tion is Natu re's ijiis take. I ntel l igence is its ins is tence on mak
ing th e s ame mis take.
S .LE M, GO LE M XI V, 1981
1.1 Motivation
A u tomatic p rogramming wil l be one of th e mos t imp ortant areas
of comp u ter s cience res earch ov er th e next twenty years . Hard ware
s p eed and cap abil ity h as l eap t f orward exp onential l y.
(
Yet s of tware
cons is tentl y l ags years beh ind th e cap abil ities of th e h ard ware. Th e
gap ap p ears to be ev er increas ing. Demand for comp u ter cod e keep s
growing bu t th e p roces s of writing cod e is s til l mired in th e mod ern
d ay equ iv al ent of th e med iev al "gu il d " d ays . Like s word s in th e 15th
centu ry, mu s kets bef ore th e earl y 19th centu ry and books bef ore th e
p rinting p res s , each p iece of comp u ter cod e is , tod ay, h and mad e by
a craf ts man for a p articu l ar p u rp os e.
Th e h is tory of comp u ter p rogramming is a h is tory of attemp ts
to mov e away f rom th e "craf ts man" ap p roach - s tru ctu red p rogram
ming, object-oriented p rogramming, object l ibraries , rap id p rototyp
ing. Bu t each of th es e ad v ances l eav es th e cod e th at d oes th e real
work f irml y in th e h and s of a craf ts man, th e p rogrammer. Th e abil ity
to enabl e comp u ters to l earn to p rogram th ems el v es is of th e u tmos t
imp ortance in f reeing th e comp u ter ind u s try and th e comp u ter u s er
f rom cod e th at is obs ol ete bef ore it is rel eas ed .
S ince th e 1950s , comp u ter s cientis ts h av e tried , with v arying de
grees of s u cces s , to giv e comp u ters th e abil ity to l earn. Th e u mbrel l a
term for th is f iel d of s tu d y is "mach ine l earning," a p h ras e coined
in 1959 by th e f irs t p ers on wh o mad e a comp u ter p erf orm a s eriou s
l earning tas k, S amu el .
Machin e Learn in g an d Gen etic Programmin g
O riginal l y, S amu el u s ed "mach ine l earning" to mean comp u ters
p rogramming th ems el v es [S amu el , 1963]. Th at goal h as , for many
years , p rov en too d if f icu l t. S o th e mach ine l earning commu nity h as
p u rs u ed more mod es t goal s . A good contemp orary d ef inition of ma
ch ine l earning is d u e to Mitch el l : "[mach ine l earning] is th e s tu d y
of comp u ter al gorith ms th at imp rov e au tomatical l y th rou gh exp eri
ence" [Mitch el l , 1996].
Genetic p rogramming, GP for s h ort, as p ires to d o p recis el y th at
- to ind u ce a p op u l ation of comp u ter p rograms th at imp rov e au
tomatical l y as th ey exp erience th e d ata on wh ich th ey are trained .
A ccord ingl y, GP is p art of th e v ery l arge bod y of res earch cal l ed
mach ine l earning (ML).
With in th e mach ine l earning commu nity, it is common to u s e "ge
netic p rogramming" as a s h orth and for any mach ine l earning s ys tem
th at ev ol v es tree s tru ctu res . Th e f ocu s on tree s tru ctu res is real l y a
tribu te to th e immens e inf l u ence of Koza. I n 1992, h e wrote a treatis e
entitl ed "Genetic Programming. O n th e Programming of C omp u t
ers by Means of Natu ral S el ection." Bef ore th is work, a nu mber of
res earch ers h ad u s ed genetic or ev ol u tionary op erators to ind u ce com
p u ter p rograms . Bu t th es e earl ier works went l argel y u nrecognized
becau s e th ey were, in ef f ect, bu ried in th e mas s of genetic al gorith m
res earch . I n h is s eminal book, Koza was th e f irs t to recognize th at GP
was s ometh ing new and d if f erent - h e ev en gav e th e new d is cip l ine its
name. Koza's res u l ts were ach iev ed by ev ol v ing tree s tru ctu res . I t is
not s u rp ris ing, th eref ore, th at many u s e th e term "genetic p rogram
ming" to mean th e ev ol u tion of tree s tru ctu res , nor is it s u rp ris ing
th at mos t of th e work in th is d is cip l ine is with v ariou s tree-bas ed
s ys tems .
Our Defin ition of GP
Th e d ef inition of GP u s ed in th is book wil l be l es s res trictiv e th an
th e d ef inition ref erred to abov e.
1. Firs t and f oremos t we wil l cons id er th e ind u ction of comp u ter
p rograms by ev ol u tionary means . A ccord ingl y, in th is book, th e
term "genetic p rogramming" s h al l incl u d e s ys tems th at con
s titu te or contain exp l icit ref erences to p rograms (execu tabl e
cod e) or to p rogramming l angu age exp res s ions . S o, for exam
p l e, ev ol v ing LI S P l is ts are cl earl y GP becau s e LI S P l is ts con
s titu te p rogramming l angu age s tru ctu res and el ements of th os e
l is ts cons titu te p rogramming l angu age exp res s ions . S imil arl y,
th e common p ractice among GP res earch ers of ev ol v ing C d ata
s tru ctu res th at contain inf ormation exp l icitl y ref erring to pro
grams or p rogram l angu age tokens wou l d al s o be GP.
2. I t is al read y cl ear from th e GP l iteratu re th at p rograms or
p rogramming l angu age s tru ctu res may be rep res ented in ways
oth er th an as trees . Res earch h as al read y es tabl is h ed th e effi
cacy of both l inear and grap h -bas ed genetic p rogramming sys
tems . Th eref ore, we d o not l imit ou r d ef inition of GP to incl u d e
onl y s ys tems th at u s e (exp res s ion) trees to rep res ent p rograms .
I ns tead , al l means of rep res enting p rograms wil l be incl u d ed .
3. Not al l al gorith ms ru nning on comp u ters are p rimaril y pro
grams . For examp l e, neu ral networks are (l earning) al gorith ms ,
bu t th eir imp l ementation is u s u al l y of s econd ary concern. Nev
erth el es s , we s h al l not excl u d e th es e al gorith ms from being le
gitimate members of th e GP f amil y. Th ere al read y exis t nu
merou s ap p l ications in th e al gorith mic d omain, and excl u d ing
th em wou l d u nneces s aril y d ep riv e GP of an imp ortant s ou rce
of ins p iration.
4. We d o not l imit ou r d ef inition of GP to incl u d e onl y s ys tems
th at u s e certain op erators , s u ch as cros s ov er. A s l ong as th ere
is a p op u l ation of p rograms or al gorith ms u s ed for th e benef it
of th e s earch , and as l ong as s ome kind of ind eterminis m is
ap p l ied to generate new v ariants , we th ink we can l egitimatel y
cal l a s ys tem a genetic p rogramming s ys tem.
Genetic Programming
is a Kind of Program
Induction
With th e abov e d is cu s s ion in mind , it is p os s ibl e to d ef ine genetic
p rogramming as th e d irect ev ol u tion of p rograms or al gorith ms for th e
p u rp os e of ind u ctiv e l earning. Th u s , in a v ery real s ens e, GP retu rns
to S amu el 's original goal for mach ine l earning in 1959 - teach ing
comp u ters to p rogram th ems el v es .
Tod ay, we p rogram by tel l ing th e comp u ter exactl y h ow to d o
ev ery p os s ibl e th ing th at we th ink it migh t need to d o - h ow to
res p ond to ev ery p os s ibl e requ es t f rom a u s er or a network. Not
onl y is th is cu mbers ome, it is imp os s ibl e for s of tware p ackages th at
rou tinel y occu p y f if ty megabytes of h ard d is k s p ace. Th e great goal of
mach ine l earning, and es p ecial l y GP, is to be abl e to tel l th e comp u ter
wh at tas k we want it to p erf orm and to h av e it l earn to p erf orm th at
tas k. GP wou l d d o s o by l etting th e comp u ter p rogram its el f or oth er
comp u ters .
I s GP cap abl e of s u ch a f eat tod ay? I n a general s ens e, no. Th at
is , th ere is no GP s ys tem th at wil l generical l y accep t any p robl em
and th en au tomatical l y generate comp u ter cod e th at ad d res s es th at
p robl em. I t is cl earl y not a h u man p rogrammer. Notwith s tand ing
th is l imitation, in onl y a few s h ort years s ince th e p u bl ication of
Koza's book, GP h as al read y ch anged th e wis d om on th e range of
p robl ems mach ine l earning can s ol v e and h as equ al ed or exceed ed
th e p erf ormance of oth er mach ine l earning s ys tems in v ariou s s tu d
ies . I n f act, GP h as al read y ev ol v ed p rograms th at are better th an
th e bes t p rograms written by p eop l e to s ol v e a nu mber of d if f icu l t
engineering p robl ems . Final l y, GP h as introd u ced a l ev el of f reed om
of rep res entation into th e mach ine l earning worl d th at d id not p rev i
ou s l y exis t. Th at is wh y we u rge th e read er to l ook caref u l l y at th is
exciting and d ynamic new branch of comp u ter s cience.
Th is ch ap ter wil l d es cribe s ome of th e central is s u es in mach ine
l earning and wil l s h ow wh ere genetic p rogramming f its in. O u r p u r
p os e is not to d es cribe th e entire f iel d of ML exh au s tiv el y - th is
ch ap ter wil l p aint with a v ery broad bru s h . Rath er, we intend to
p l ace GP in th e context of th e ov eral l f iel d .
1
1
A good general d is cu s s ion of artif icial intel l igence, mach ine learn
ing, and genetic p rogramming's p l ace in mach ine l earning is contained in
[A ngel ine, 1994].
We wil l begin with & brief h is tory of mach ine l earning f rom th e
1950s u ntil th e p res ent. A f ter th at, we wil l l ook at mach ine l earning
as a process. Th is process is remarkabl y s imil ar from one mach ine
l earning p arad igm to anoth er. Moreov er, u nd ers tand ing th is p roces s
will be es s ential to u nd ers tand ing GP its el f . Final l y, we wil l examine
s ome of th e d etail s of th e mach ine l earning p roces s . I t is in th e d etail s
th at mach ine l earning p arad igms d iv erge and genetic p rogramming
becomes qu ite d is tinctiv e.
1.2 A Brief History of Machine Learning
A l th ou gh genetic p rogramming is a rel ativ e newcomer to th e worl d of
mach ine l earning, s ome of th e earl ies t mach ine l earning res earch bore
a d is tinct res embl ance to tod ay's GP. I n 1958 and 1959, Fried berg
attemp ted to s ol v e f airl y s imp l e p robl ems by teach ing a comp u ter to
write comp u ter p rograms [Fried berg, 1958] [Fried berg et al ., 1959].
Fried berg's p rograms were 64 ins tru ctions l ong and were abl e to Early A ttempts at
manip u l ate, bitwis e, a 64-bit d ata v ector. E ach ins tru ction h ad a Program In duction
v irtu al "op cod e" and two op erand s , wh ich cou l d ref erence eith er th e
d ata v ector or th e ins tru ctions . A n ins tru ction cou l d ju mp to any
oth er ins tru ction or it cou l d manip u l ate any bit of th e d ata v ector.
Fried berg's s ys tem l earned by u s ing wh at l ooks a l ot l ike a mod ern
mu tation op erator - rand om initial ization of th e ind iv id u al s ol u tions
and rand om ch anges in th e ins tru ctions .
Fried berg's res u l ts were l imited . Bu t h is th inking and v is ion were
not. Here is h ow Fried berg f ramed th e central is s u e of mach ine learn
ing:
If we are ev er to make a mach ine th at will s p eak, u nd ers tand
or trans l ate h u man l angu ages , s olv e math ematical p robl ems with
imagination, p ractice a p rof es s ion or d irect an organization, eith er
we mu s t red u ce th es e activ ities to a s cience s o exact th at we can
tel l a mach ine p recis el y h ow to go abou t d oing th em or we mu s t
d ev elop a mach ine th at can d o th ings with ou t being tol d p recis el y
h ow... . Th e mach ine migh t be d es igned to grav itate toward th os e
p roced u res wh ich mos t of ten el icit from u s a f av orabl e res p ons e.
We cou l d teach th is mach ine to p erf orm a tas k ev en th ou gh we
cou l d not d es cribe a p recis e meth od for p erf orming it, p rov id ed
only th at we u nd ers tood th e tas k well enou gh to be abl e to as
certain wh eth er or not it h ad been d one s u cces s f u lly. . . . I n s h ort,
al th ou gh it migh t l earn to p erf orm a tas k with ou t being tol d pre
cis ely h ow to p erf orm it, it wou ld s til l h av e to be tol d p recis el y
how to l earn.
R.M. FRI E DBE RG, 1958
A rtificial In telligen ce Pried berg's anal ys is , anticip ated th e coming s p l it between th e ar-
Rules the Day tif icial intel l igence commu nity (with its emp h as is on exp ert kn owl
edge) and mach ine l earning (with its emp h as is on learn in g). Ju s t
a few years af ter Pried berg's work, ML took a back s eat to exp ert
knowl ed ge s ys tems . I n f act, artif icial intel l igence (A I ) res earch , th e
s tu d y of d omain-knowl ed ge and knowl ed ge s ys tems , was th e d omi
nant f orm of comp u tational intel l igence d u ring th e 1960s and 1970s .
E xp ert s ys tem d omain-knowl ed ge in th is era was general l y h u man
knowl ed ge encod ed into a s ys tem. For examp l e, an exp ert s ys tem
migh t be d ev el op ed by p ol l ing h u man exp erts abou t h ow th ey make
p articu l ar kind s of d ecis ions . Th en, th e res u l ts of th at p ol l ing wou l d
be encod ed into th e exp ert s ys tem for u s e in making real -worl d deci
s ions .
Th e typ e of intel l igence rep res ented by s u ch exp ert s ys tems was
qu ite d if f erent from mach ine l earning becau s e it d id not l earn from
exp erience. I n p arap h ras ing Fried berg's terms , A I exp ert s ys tems
attemp t to red u ce p erf orming s p ecif ic tas ks ". . . to a s cience s o exact
th at we can tel l a mach ine p recis el y h ow to go abou t d oing th em"
[Fried berg, 1958].
Th e exp ert s ys tem ap p roach , in th e 1960s and th ereaf ter, h as h ad
many s u cces s es , incl u d ing:
G MYC I N - Diagnos is of I nf ectiou s Dis eas es
Q MO LE - Dis eas e Diagnos is
Q PRO S PE C TO R - Mineral E xp l oration A d v ice
Q DE S I GN A DVI S O R - S il icon C h ip Des ign A d v ice
Q Rl - C omp u ter C onf igu ration
The Reemergen ce of Notwith s tand ing th is s u cces s , exp ert s ys tems h av e tu rned ou t
Learn in g to be brittl e and to h av e d if f icu l ty h and l ing inp u ts th at are nov el
or nois y. A s a res u l t, in th e 1970s , interes t in mach ine l earning
reemerged . A ttention s h if ted from th e s tatic qu es tion of h ow to rep
res ent knowl ed ge to th e d ynamic qu es t for h ow to acqu ire it. I n s h ort,
th e s earch began in earnes t to f ind a way, in Fried berg's word s , to
tel l a comp u ter "p recis el y h ow to l earn."
By th e earl y 1980s , mach ine l earning was recognized as a d is tinct
s cientif ic d is cip l ine. S ince th en, th e f iel d h as grown tremend ou s l y.
S ys tems now exis t th at can, in narrow d omains , l earn from exp erience
and make u s ef u l p red ictions abou t th e worl d . Tod ay, mach ine learn
ing is f requ entl y an imp ortant p art of real -worl d ap p l ications s u ch
as ind u s trial p roces s control , robotics control , time s eries p red iction,
p red iction of cred itworth ines s , and p attern recognition p robl ems s u ch
as op tical ch aracter recognition and v oice recognition, to name bu t a
few examp l es [Wh ite and S of ge, 1992] [Bieth ah n and Nis s en, 1995].
A t th e h igh es t l ev el , any mach ine l earning s ys tem f aces a s imil ar
tas k - h ow to l earn f rom its exp erience of th e env ironment. Th e
process of mach ine l earning, th at is , th e d ef ining of th e env ironment
and th e tech niqu es for l etting th e mach ine l earning s ys tem exp erience
th e env ironment for both training and ev al u ation, are s u rp ris ingl y
s imil ar from s ys tem to s ys tem. I n th e next s ection of th is ch ap ter,
we s h al l , th eref ore, f ocu s on mach ine l earning as a high-level process.
I n d oing s o, we wil l s ee wh at many ML p arad igms h av e in common.
O n th e one h and , many s u cces s f u l mach ine l earning p arad igms
s eem rad ical l y d is s imil ar in h ow th ey l earn from th e env ironment.
For examp l e, giv en th e s ame env ironment s ome mach ine l earning
s ys tems l earn by ind u cing conju nctiv e or d is ju nctiv e Bool ean net
works (s ee S ection 1.5.2). Th e imp l icit as s u mp tion of s u ch s ys tems is
th at th e worl d may be mod el ed in f ormal A ris totel ian and Bool ean
terms . O n th e oth er h and , connectionis t s ys tems s u ch as f u zzy ad ap
tiv e or neu ral networks create mod el s of th e s ame env ironment bas ed
(l oos el y) on biol ogical nerv ou s s ys tems . Th ey regard th e worl d as
non-l inear, h igh l y comp l ex, and d ecid ed l y non-A ris totel ian (s ee Sec
tion 1.5.3). Th e v ariety d oes not end th ere becau s e v ariou s s ys tems
al s o s earch th rou gh p os s ibl e s ol u tions in d if f erent ways . For exam
p l e, bl ind s earch , beam s earch , and h il l cl imbing are p rincip al s earch
p arad igms (s ee S ection 1.6). E ach may be broken into many s u bd is -
cip l ines and each h as grown ou t of d if f erent p h il os op h ies abou t h ow
l earning works , and ind eed , wh at l earning is .
A ccord ingl y, l ater in th is ch ap ter we s h al l ov erv iew th e ways in
wh ich mach ine l earning s ys tems are d is tinct from each oth er. I n oth er
word s , we wil l l ook at th e d etail s of h ow d if f erent mach ine l earning
s ys tems attack th e p robl em of l earning.
High-Level
Commonalities among
ML Systems
Implementation
Differences among
Machine Learning
Systems
1.3 Machine Learning as a Process
Mach ine l earning is a p roces s th at begins with th e id entif ication of
th e l earning d omain and end s with tes ting and u s ing th e res u l ts of
th e l earning. I t wil l be u s ef u l to s tart with an ov erv iew of h ow a
mach ine l earning s ys tem is d ev el op ed , trained , and tes ted . Th e key
p arts of th is p roces s are th e "l earning d omain," th e "training s et," th e
"l earning s ys tem," and "tes ting" th e res u l ts of th e l earning p roces s .
Th is ov eral l process of mach ine l earning is v ery imp ortant for th e
read er to u nd ers tand and we u rge s p ecial attention in th is s ection if
th e read er is not al read y f amil iar with th e s u bject matter.
Mach ine l earning s ys tems are u s u al l y ap p l ied to a "l earning d o- The Learning Domain
main." A l earning d omain is any p robl em or s et of f acts wh ere th e
res earch er is abl e to id entif y "f eatu res " of th e d omain th at may be
meas u red , and a res u l t or res u l ts (f requ entl y organized as "cl as s es ")
th e res earch er wou l d l ike to p red ict. For examp l e, th e s tock market
may be th e ch os en d omain, th e cl os ing S &P ind ex
2
for th e p as t 30
d ays may be th e f eatu res of th e d omain s el ected by th e res earch er,
and th e cl os ing S &P ind ex tomorrow may be th e res u l t th at th e re
s earch er wants to p red ict. O f cou rs e, th e f eatu res (p as t ind ex v al u es )
ou gh t to be rel ated in s ome manner to th e d es ired res u l t (th e f u tu re
ind ex v al u e). O th erwis e, a mach ine l earning s ys tem bas ed on th es e
f eatu res wil l h av e l ittl e p red ictiv e p ower.
I n th e GP worl d , a "f eatu re" wou l d more l ikel y be ref erred to as
an "inp u t" and th e "cl as s " wou l d more l ikel y be ref erred to as th e
"ou tp u t." Th es e are mos tl y d if f erences of terminol ogy.
3
Regard l es s of
terminol ogy, once th e f eatu res (inp u ts ) are ch os en f rom th e l earning
d omain, th ey d ef ine th e ov eral l d imens ions of th e env ironment th at
th e ML s ys tem wil l exp erience and f rom wh ich it wil l (h op ef u l l y)
l earn.
Bu t th e s el ection of f eatu res (inp u ts ) d oes not comp l etel y d ef ine
th e env ironment f rom wh ich th e s ys tem wil l l earn. Th e res earch er
mu s t al s o ch oos e s p ecif ic p as t examp l es f rom th e l earning d omain.
E ach examp l e s h ou l d contain d ata th at rep res ent one ins tance of
th e rel ations h ip between th e ch os en f eatu res (inp u ts ) and th e cl as s es
(ou tp u ts ). Th es e examp l es are of ten ref erred to as "training cas es "
or "training ins tances ." I n GP, th ey are cal l ed "f itnes s cas es ." Col
l ectiv el y, al l of th e training ins tances are ref erred to as th e "training
s et." O nce th e training s et is s el ected , th e l earning env ironment of
th e s ys tem h as been d ef ined .
Mach ine l earning occu rs by training. A n ML s ys tem goes th rou gh
th e training s et and attemp ts to l earn f rom th e examp l es . I n GP, th is
means th at th e s ys tem mu s t l earn a comp u ter p rogram th at is abl e
to p red ict th e ou tp u ts of th e training s et f rom th e inp u ts . I n more
trad itional mach ine l earning terminol ogy, GP mu s t f ind a comp u ter
p rogram th at can p red ict th e cl as s f rom th e f eatu res of th e l earning
d omain.
Final l y, th e res earch er mu s t ap p rais e th e qu al ity of th e l earning
th at h as taken p l ace. O ne way to ap p rais e th e qu al ity of l earning is
2
A l ead ing s tock market ind icator in th e United S tates .
Th e u s e of th e term "cl as s " is actu al l y d u e to th e h is toric f ocu s of
mains tream mach ine l earning on cl as s if ication p robl ems . We will main
tain th at terminol ogy h ere for s imp l icity. Both GP and many oth er ML
p arad igms are al s o cap abl e of d eal ing with d omains th at requ ire nu meric
ou tp u t for p robl ems th at are not cl as s if ication p robl ems . I n th is cas e, th e
terminol ogy wou ld be p robl em s p ecif ic.
to tes t th e abil ity of th e bes t s ol u tion of th e ML s ys tem to p red ict
ou tp u ts f rom a "tes t s et." A tes t s et is comp ris ed of inp u ts and
ou tp u ts from th e s ame d omain th e s ys tem trained u p on. A l th ou gh
from th e s ame d omain, th e tes t s et contains d if f erent examp l es th an
th e training s et. Th e abil ity of a s ys tem to p red ict th e ou tp u ts of
th e tes t s et is of ten ref erred to as "general ization," th at is , can th e
l earned s ol u tion gen eralize to new d ata or h as it ju s t memorized th e
exis ting training s et? Mu ch of C h ap ter 8 is d ev oted to th is v ery
imp ortant is s u e. Th ere, we s h al l al s o s ee th at u s ing a training s et
and a tes t s et onl y ov ers imp l if ies th e p robl em of general ization.
A n examp l e migh t be u s ef u l h ere: th e "I ris d ata s et."
4
Th e I ris
d ata s et p res ents a "cl as s if ication" p robl em - th at is , th e ch al l enge
is to l earn to id entif y th e class of I ris to wh ich a p h otograp h of a
p articu l ar iris p l ant bel ongs . Th e s et its el f is bas ed on a s amp l e of
150 d if f erent p h otograp h s of iris es . Th e p h otos rep res ent iris es f rom
th ree d if f erent cl as s es - cl as s 0 is Iris Setosa, cl as s 1 is Iris Versicolour,
and cl as s 2 is Iris Virgin ica. Th e d ata s et its el f is comp ris ed of
meas u rements mad e f rom th es e 150 p h otos .
Th e l earning d omain is , in th is examp l e, al l p h otos of iris es of
th es e th ree typ es . Th e 150 p h otos are not th e l earning d omain -
th ey are ju s t s p ecif ic examp l es d rawn from th e d omain. Wh en th e
res earch er ch os e wh at meas u rements to make off th e p h otos , h e or
s h e id entif ied th e f eatu res of th e d omain. Here are th e inp u ts (or
f eatu res ) th at were ch os en:
Q I np u t 1. S ep al l ength in cm.
Q I np u t 2. S ep al wid th in cm.
Q I np u t 3. Petal l ength in cm.
Q I np u t 4. Petal wid th in cm.
Th ere is , of cou rs e, a v al u e for each of th es e inp u ts in each of th e 150
training ins tances .
Th e 150 ins tances are th en d iv id ed into two grou p s , a training
s et and a tes t s et. A t th is p oint, a mach ine l earning s ys tem is giv en
acces s to th e training d ata and its training al gorith m is execu ted .
4
A word of cau tion: th e I ris d ata s et is of ten ref erred to in th e mach ine
l earning l iteratu re as a "cl as s ic." Th is may imp l y to th e read er th at it
migh t be a good id ea actu al l y to u s e th e I ris d ata to tes t an ML s ys tem.
Howev er, th e I ris d omain is triv ial l y s imp l e, at l eas t for GP, and its u s e
as a tes t of ML s ys tems is d is cou raged [Francone et al ., 1996]. We u s e
th e examp l e in th e text onl y becau s e it is a s imp l e examp l e of a l earning
d omain.
Th e goal in training is to take th e s ep al and p etal meas u rements (th e
f eatu res ) in th e training s et and to l earn to p red ict wh ich of th e th ree
cl as s es a p articu l ar iris bel ongs to. Not onl y mu s t th e s ys tem p red ict
th e cl as s of I ris for th e training s et, it s h ou l d al s o be abl e to d o s o
for th e tes t s et in a manner th at is s tatis tical l y s ignif icant.
With th is ov erv iew of th e p roces s of mach ine l earning in p l ace,
we can now l ook at s ome of th e d etail s of l earning for v ariou s mach ine
l earning p arad igms .
1.4 Major Issues in Machine Learning
Until th is time, th e manner in wh ich l earning occu rs h as been ignored
s o th at we cou l d f ocu s on is s u es common to al l ML s ys tems . Bu t
th e ch oices mad e in d es igning a l earning al gorith m are cru cial . Th e
l earning al gorith m d ef ines th e s ys tem in wh ich it is u s ed more th an
any oth er s ingl e f actor. Not onl y th at, th e l earning al gorith m is wh ere
ML s ys tems d iv erge. GP s ys tems u s e a l earning al gorith m bas ed on
an anal ogy with natu ral ev ol u tion. "Mu l til ayer f eed f orward neu ral
networks " are bas ed on an anal ogy with biol ogical nerv ou s s ys tems .
Bayes /Parzen s ys tems are bas ed on s tatis tics .
Th ere are many ways to cl as s if y l earning al gorith ms . Here, we
wil l cl as s if y th em by h ow th ey ans wer th e f ol l owing f ou r qu es tions
abou t th e "h ow to" of l earning:
1. How are s ol u tions rep res ented in th e al gorith m?
2. Wh at s earch op erators d oes th e l earning al gorith m u s e to mov e
in th e s ol u tion s p ace?
3. Wh at typ e of s earch is cond u cted ?
4. I s th e l earning s u p erv is ed or u ns u p erv is ed ?
E ach of th es e f ou r qu es tions rais es imp ortant and s ometimes con
tentiou s is s u es for l earning al gorith m d es ign. I n l ooking at s ome of
th e d if f erent ways in wh ich d if f erent ML s ys tems h av e ans wered th es e
qu es tions , th e p l ace of GP in mach ine l earning wil l become cl earer.
1.5 Representing the Problem
1.5.1 What Is the Problem Representation?
A n ML s ys tem's p robl em rep res entation is its d ef inition of wh at pos
s ibl e s ol u tions to th e p robl em l ook l ike - wh at kind s of inp u ts d o
th e s ol u tions accep t, h ow d o th ey trans f orm th e inp u ts , h ow d o th ey
p rod u ce an ou tp u t? I n s h ort, th e p robl em rep res entation d ef ines th e
s et of al l p os s ibl e s ol u tions to a p robl em th at a p articu l ar ML s ys tem
can f ind . We wil l f requ entl y ref er to possible s ol u tions to a p robl em
as "cand id ate s ol u tions ." I n oth er word s , th e rep res entation of th e
p robl em d ef ines th e s p ace of cand id ate s ol u tions an ML s ys tem can
f ind for a p articu l ar p robl em.
A s imp l e examp l e il l u s trates th is p oint. S u p p os e we wanted to
p red ict th e v al u e of v ariabl e y f rom v al u es of v ariabl e x. I n th e terms
of th e p rev iou s s ection, y is th e ou tp u t and x is th e inp u t. A v ery
s imp l e rep res entation of th is p robl em migh t take th e f orm of a s econd
ord er p ol ynomial s u ch as :
y = ax
2
+ bx + c (1.1)
Th e typ es of s ol u tions th is s ys tem cou l d f ind wou l d be v ery l imited
- al l th e s ys tem cou l d d o wou l d be to op timize th e p arameters a, 6,
and c. O ne p os s ibl e cand id ate s ol u tion in th is rep res entation wou l d
be:
y = 2.01z
2
+ 6A x + 7 (1.2)
Th e rep res entation cou l d be mad e more comp l ex by al l owing th e sys
tem to ch ange th e ord er of th e p ol ynomial . Th en, it cou l d exp l ore
a s ol u tion s p ace th at incl u d ed both h igh er and lower ord er p olyno
mial s . I n oth er word s , th e rep res entation of th e p robl em d ef ines and
l imits th e s p ace of p os s ibl e s ol u tions th e s ys tem is cap abl e of f ind ing.
Th ere are actu al l y th ree d if f erent l ev el s on wh ich a p robl em may
be rep res ented [Langl ey, 1996].
1. Representation of the input and output set
I n th e p ol ynomial examp l e abov e, th e training s et wou l d be
p airs of nu mbers , one v al u e for th e inp u t x and anoth er for
th e ou tp u t y. Th e rep res entation of th e inp u ts and ou tp u ts
wou l d , th eref ore, be an integer or real nu mber rep res entation.
I t is al s o common to rep res ent inp u ts as Bool ean v al u es , real
nu mbers between 0 and 1, enu merated s ets , or in many oth er
ways .
2. Representation of the set of concepts the computer may
learn
Th is may be ref erred to as th e "concep t d es crip tion l angu age."
Th e manner in wh ich l earned concep ts can be exp res s ed in
mach ine l earning is d iv ers e. Likewis e, th e comp l exity of th e
organization of th e l earned concep ts v aries wid el y. Dif f erent
s ys tems u s e, among oth er th ings , s imp l e conju nctiv e Bool ean
exp res s ions , d is ju nctiv e l is ts of f eatu res , cl as s s u mmaries , cas e-
bas ed d es crip tions , inf erence trees , th res h ol d u nits , mu l til ayer
feed f orward networks , d ecis ion trees , and in GP, comp u ter pro
grams .
3. Interpretation of the learned concepts as outputs
C oncep ts are imp ortant, bu t th ey need to be conv erted to re
al ity. Th e interp reter d oes ju s t th at. For ins tance, a med ical
d iagnos is s ys tem may take as inp u t: wh eth er th e p atient h as
ch es t p ain, nu mbnes s in th e extremities , and is more th an 20
p ou nd s ov erweigh t. Th e th ree inp u ts may be h el d in s imp l e
concep ts s u ch as :
if ch es t_p ain = TRUE th en
h igh _h eart_attack_ris k := TRUE
el s e
h igh _h eart_attack_ris k := FALSE;
I t is not cl ear from s u ch concep ts h ow to generate an ou tp u t
wh en th e concep ts are combined . Wh at s h ou l d be d one, for
examp l e, wh ere a p atient h as ch es t p ain and is th irty p ou nd s
ov erweigh t bu t no nu mbnes s is occu rring? Th at is wh at th e
interp reter wou ld d o. A n interp reter cou ld p red ict ris k of h eart
attack (th at is , generate an ou tp u t) by requ iring th at al l th ree
concep ts be tru e (a Bool ean interp retation). O n th e oth er h and ,
it cou l d requ ire only th at two of th e th ree be tru e (a th res h ol d
interp retation).
I t wou ld be imp os s ibl e to s u rv ey ev en a s u bs tantial p ortion of th e
typ es of rep res entational s ch emes th at h av e been imp l emented in var
iou s mach ine l earning s ys tems .
5
A s u rv ey wou ld be mad e ev en more
comp l ex by th e f act th at many s ys tems mix and match typ es of rep
res entations . For examp l e, a s ys tem cou ld rep res ent th e inp u ts and
ou tp u ts as Bool ean wh ile th e concep ts cou ld be s tored as cas e-bas ed
ins tances and th e interp retation of th e concep ts cou l d u s e th res h ol d
u nits .
We will try to follow th e abov e th ree th read s th rou gh th e exam
p l es bel ow.
1.5.2 Boolean Representations
S ome mach ine l earning s ys tems rep res ent p robl ems in Bool ean terms .
By Bool ean, we mean th at each training ins tance contains an ind ica
tion wh eth er a f eatu re (or inp u t) of th e s ys tem is tru e or f als e. I n a
5
A n excel l ent d is cu s s ion of th e d etail s of th es e and many oth er mach ine
l earning s ys tems and oth er is s u es may be f ou nd in [Langl ey, 1996], f rom
wh ich th is ch ap ter d raws h eav il y.
1.5 Representing the Problem
p u re Bool ean s ys tem th e inp u ts (or f eatu res ) are exp res s ed in Bool ean
terms and th e s ys tem d es cribes th e concep ts th at it h as l earned as
Boolean conju nctions or d is ju nctions of th e inp u t f eatu res (th e con
cep t d es crip tion l angu age). We wil l examine h ow Bool ean s ys tems
migh t rep res ent f eatu res of th e comic s trip worl d of Dick Tracy as a
mach ine l earning p robl em.
We begin by d es cribing a conju nctiv e Bool ean s ys tem and h ow it
migh t d es cribe th e f eatu res of Dick Tracy's worl d . By conju nctiv e,
we mean th at th e s ys tem u s es th e Bool ean AND to join f eatu res (or
inp u ts ) togeth er into concep ts and ou tp u ts .
A s s u me th at a res earch er wants to be abl e to p red ict wh eth er a
cartoon ch aracter in th e Dick Tracy comic s trip is a "bad gu y." Th e
res earch er caref u l l y examines years of ol d comic p ages and d etermines
th at th e f ollowing f eatu res migh t be u s ef u l in d is tingu is h ing th e cl as s
of "bad gu ys " from ev eryone el s e:
Featu re
S h if ty eyes
S carred f ace
S ku l l tattoo
S l ou ch es wh il e wal king
Hooked nos e
Wears two-way wris t rad io
Val u e
Tru e or Fal s e
Tru e or Fal s e
Tru e or Fal s e
Tru e or Fal s e
Tru e or Fal s e
Tru e or Fal s e
Conjunctive Boolean
Representations
Table 1.1
Inputs for classification
A ll of th es e f eatu res (inp u ts for cl as s if ication) are Bool ean (tru e
or fals e) v al u es . A comp l etel y Bool ean s ys tem wou l d al s o exp res s
th e concep ts th at cou l d be l earned as Bool ean v al u es . A conju nctiv e
Bool ean s ys tem migh t l earn th e f ol l owing concep ts in cl as s if ying good
gu ys from bad gu ys :
C oncep t 1
C oncep t 2
S h if ty eyes AND S carred face AND Has s ku l l tattoo |
Hooked nos e AND Wears two-way wris t rad io |
Table 1.2
Conjunctive concepts
Bu t th e d es crip tions th ems el v es d o not su ffice; th e concep ts h av e
to be interp reted into cl as s if ications arid th e interp retation may be
rep res ented in d if f erent ways .
Here is an examp l e of h ow a Bool ean Dick Tracy migh t go abou t
clas s if ying th e abov e concep ts . Dick Tracy h ims el f wou l d immed i
atel y recognize th at a v al u e of TRUE for C oncep t 1 was ind icativ e
of criminal ity from h is "crime watch ers " gu id e. O n th e oth er h and ,
C oncep t 2 (h ooked nos e arid two-way wris t rad io) is cons is tent with
Table 1.3
Classification concepts
& good gu y - Dick Tracy h ims el f . S o h ere is h ow Dick Tracy wou l d
u s e th e concep ts to cl as s if y s u s p ects as bad gu ys :
Concept
1
2
Value
True
True
Bad guy?
True
False
Disjunctive Boolean
Representations
Table 1.4
Disjunctive concepts
I n C oncep t 1, th ere are th ree f actors th at ind icate criminal ity -
s h if ty eyes , s carred f ace, and s ku l l tattoo. Mu s t al l th ree be tru e
bef ore we d ecl are s omeone a bad gu y? I n a conju nctiv e Bool ean
s ys tem, th e ans wer is yes . Th eref ore, with ou t a s carred f ace, a man
with s h if ty eyes and a s ku l l tattoo wou l d not be cl as s if ied as a bad
guy.
Now we may l ook brief l y at a d is ju nctiv e Bool ean s ys tem. By
disjun ctive, we mean th at th e interp reter joins th e s imp l er concep ts
with th e Bool ean OR f u nction. I n a d is ju nctiv e Bool ean s ys tem, if any
of th e s imp l e l earned concep ts ev al u ate as tru e in a p articu l ar training
ins tance, th e interp reter ev al u ates th e training ins tance as h av ing an
ou tp u t of tru e al s o. Th ree s imp l e concep ts f rom Dick Tracy's worl d
migh t be rep res ented as f ollows :
C oncep t
C oncep t 1
C oncep t 2
C oncep t 3
Des crip tion
S h if ty eyes
S carred f ace
Has s ku l l tattoo
Val u e
Tru e or Fal s e
Tru e or Fal s e
Tru e or Fal s e
I n th is examp l e, if an y one of th e th ree concep ts in th e l is t eval
u ated as tru e, th e s ys tem wou l d ev al u ate th e entire training ins tance
as tru e. O f cou rs e, d is ju nctiv e Bool ean s ys tems wou l d ord inaril y be
ap p l ied to a l is t of concep ts cons id erabl y more comp l ex th an th os e
in th e abov e tabl e. I n th at ev ent, th e l is t h ol d s th e concep ts and it
d ictates th e ord er in wh ich th e concep ts are ev al u ated .
Dis ju nctiv e s ys tems can d es cribe more comp l ex l earning d omains
u s ing conju nctiv e concep ts and v ice v ers a. For examp l e, in Figu re 1.1,
th e two cl as s es A and B are l inearl y s ep arabl e - th at is , one cou l d
d raw a l ine (or in th ree or more d imens ions , a p l ane or a h yp erp l ane)
th at s ep arates al l ins tances of one cl as s from th os e of th e oth er.
Both conju nctiv e and d is ju nctiv e s ys tems can f u lly d es cribe a
d omain th at is l inearl y s ep arabl e. O n th e oth er h and , in Figu re 1.2,
th e two cl as s es are not l inearl y s ep arabl e. A l th ou gh th is is a more
d if f icu l t tas k, Bool ean s ys tems can comp l etel y d es cribe th e d omain
in Figu re 1.2.
Figure 1.1
Two classes (A and B)
that are linearly separable
Figure 1.2
Two classes (A and B)
that are not linearly
separable
1.5.3 Threshold Representations
Nu meric th res h ol d rep res entations are more p owerf u l th an Bool ean
rep res entations . A th res h ol d u nit p rod u ces a v al u e onl y if its inp u t
exceed s s ome th res h ol d . Wh en its ou tp u ts are exp res s ed in Bool ean
terms , a th res h ol d u nit h as a v al u e of TRUE onl y if th e inp u t to th at
u nit exceed s a p articu l ar v al u e. Note th at th e u s e of th e term "u nit"
makes th e th res h ol d ap p roach v ery general . A th res h ol d u nit may
ap p ear as an inp u t, a concep t, or an interp reter in a mach ine l earning
s ys tem.
Th e Dick Tracy examp l e il l u s trates h ow a th res h ol d u nit may be
u s ed as an interp reter in th e p robl em rep res entation. I n th e d is cu s s ion
abov e, th e conju nctiv e Bool ean interp reter of concep t 1 (s h if ty eyes
AND s ku l l tatoo AND s carred f ace) requ ired th at all of th e f eatu res of
concep t 1 be t r u e bef ore th e interp reter cou l d ev al u ate th e concep t
its el f as being t ru e. I n s h ort, if th ere are n f eatu res in a conju nctiv e
Bool ean concep t, n of n f eatu res mu s t be t ru e for th e exp res s ion to
ev al u ate as t ru e. I n a d is ju nctiv e Bool ean s ys tem, 1 ou t of n f eatu res
need ed to be t ru e.
Dick Tracy Revisited
Multilayer Feedforward
Neural Network
A s imp l e th res h ol d interp reter u nit p rod u ces qu ite a d if f erent
res u l t. Wh ere 1 < m < n , one typ e of th res h ol d u nit requ ires th at
onl y m of th e n f eatu res in a concep t be t ru e for th e interp reter to
ev al u ate th e entire concep t as being t ru e. S u ch an m of n interp reter
wou l d ap p l y to concep t 1 from ou r Dick Tracy examp l e as f ol l ows .
S u p p os e th at m = 2. A th res h ol d u nit wou l d as s es s a s u s p ect with
s h if ty eyes AND a s ku l l tattoo as a bad gu y, ev en th ou gh th e s u s p ect
d id not h av e a s carred f ace. I n oth er word s , onl y two of th e th ree
el ements in concep t 1 abov e wou l d h av e to be t r u e for th e th res h ol d
interp reter to ev al u ate th e concep t as t ru e.
Th e p rev iou s p aragrap h d is cu s s es a s imp l e th res h ol d interp reter
for a Bool ean concep t d es crip tion l angu age. Bu t as noted abov e,
th res h ol d u nits may be u s ed in any p art of a rep res entation, not ju s t
for th e interp reter. I n mu l til ayer f eed f orward neu ral network, th res h
ol d concep ts are u s ed in al l p arts of th e p robl em rep res entation. A
mu l til ayer f eed f orward neu ral network u s es "neu rons " as its th res h ol d
u nits . Figu re 1.3 s h ows a s imp l e examp l e with th ree inp u t neu rons ,
two "h id d en" neu rons , and one ou tp u t neu ron.
Figure 1.3
A multilayer feedforward
neural network with
nodes 1 ... 6 and weights
Wl,4 . - W5,6
E ach neu ron s u ms al l of its inp u ts togeth er and th en d etermines
wh eth er its total inp u t exceed s a certain th res h ol d . If it d oes not, th e
ou tp u t v al u e of th e neu ron is typ ical l y 0. Bu t if th e inp u ts d o exceed
th e th res h ol d , th e neu ron "f ires ," th ereby p as s ing a p os itiv e v al u e on
to anoth er neu ron. Mu l til ayer f eed f orward neu ral networks can be
v ery p owerf u l and can exp res s v ery comp l ex rel ations h ip s between
inp u ts and ou tp u ts .
1.5.4 Case-Based Representations
A noth er typ e of mach ine l earning s tores training ins tances as rep re
s entations of cl as s es or s tores general d es crip tions of cl as s es by aver
aging training ins tances in s ome way. A v ery s imp l e ins tance av erag
ing s ys tem for two cl as s es , rep res ented by A and ?, is il l u s trated in
Figu re 1.4.
Figure 1.4
Classification based on
instance averaging
E ach cl as s h as two inp u ts , th e x and y v al u es on th e two axes .
Th e av erage of th e inp u ts for th e A cl as s is th e circl e. Th e av erage
of th e inp u ts for th e B cl as s is th e s qu are. To cl as s if y a new s et of
inp u ts , th e s ys tem s imp l y cal cu l ates h ow cl os e th e new inp u ts are to
each of th e two av erages . Th e cl os er of th e two av erages d etermines
th e cl as s of th e new inp u t.
Wh il e th is s imp l e av eraging s ys tem may be f ine for s imp l e learn
ing d omains as s h own in Figu re 1.4, it wou l d cl earl y h av e a d if f icu l t
time d eal ing with th e l inearl y non-s ep arabl e cl as s es s h own in Fig
u re 1.2. Th e p robl em with u s ing ins tance av eraging on th e l earning
d omain d emons trated in Figu re 1.2 is h ow to d etermine a v al u e for
clas s A . A s imp l e av erage is obv iou s l y u naccep tabl e for cl as s A .
O th er cas e-bas ed l earning s ys tems h and l e l inear non-s ep arabil ity
mu ch more gracef u l l y. For examp l e, th e K-neares t neigh bor ap p roach
d oes s o by s toring th e training ins tances th ems el v es as p art of th e
p robl em rep res entation. A new inp u t is cl as s if ied by f ind ing th e cl as s
of th e inp u t's K neares t neigh bors in th e s tored training ins tances .
Th en th e new inp u t is cl as s if ied as a member of th e cl as s mos t of ten
rep res ented among its K neares t neigh bors . For examp l e, s u p p os e a
p articu l ar K-neares t neigh bor s ys tem l ooks at th e 3 neares t neigh bors
of a new inp u t; if 2 of th os e 3 neigh bors were from cl as s A , th en th e
s ys tem wou l d cl as s if y th e new inp u t as being in cl as s A al s o (th is is
a th res h ol d interp reter combined with a cas e-bas ed s ys tem).
I n Figu re 1.5 th e training ins tances for th e cl as s es A and B are
l inearl y non-s ep arabl e. A K-neares t neigh bor cl as s if ier with K = 3
K-Nearest Neighbor
Method
Figure 1.5
Using K-nearest
neighbors to classify
inputs
wou l d cl as s if y th e th ree new inp u ts / i , 1%, and 1$ as being in cl as s es
A , B, and A , res p ectiv el y. Howev er, if K = 5, /i wou l d be cl as s if ied
as a member of cl as s B.
Bayes/Parzen Bayes /Parzen cl as s if ication is treated at l ength in many s tatis tics
Classification textbooks and is l oos el y rel ated to th e f f -neares t neigh bor s ys tem
[Mas ters , 1995a]. Bayes p rov ed th at if we know th e tru e p robabil
ity d ens ity f u nction for each cl as s , th en an op timal d ecis ion ru l e for
cl as s if ication may be f ormu l ated .
O f cou rs e, th e p robl em is ap p roximating th at p robabil ity d ens ity
f u nction. I n 1962, Parzen d etermined an excel l ent meth od for esti
mating s u ch f u nctions from rand om s amp l es . I n f act, as th e s amp l e
s ize increas es , Parzen's meth od conv erges on th e tru e d ens ity func
tion [Parzen, 1962]. Parzen u s es a p otential f u nction for each train
ing ins tance [Meis el , 1972]. Th e f u nction is centered on th e training
ins tance and d ecreas es in v al u e rap id l y as it mov es away f rom th e
training ins tance. Parzen's es timator is s imp l y th e s cal ed s u m of th e
p otential f u nction for al l s amp l e cas es f rom a cl as s . S o in a s ens e,
Parzen's meth od is a v ery s op h is ticated rel ativ e of th e K-neares t
neigh bor s ys tems . Parzen's es timator h as been extend ed to mu l ti
p l e v ariabl e s itu ations [C acou l l os , 1966] and is th e backbone of two
neu ral network p arad igms , th e "p robabil is tic neu ral network" and th e
"general regres s ion neu ral network" [S p ech t, 1990] [S p ech t, 1991].
1.5.5 Tree Representations
Many p robl em s p ace rep res entations are bas ed on d ecis ion trees .
C ons equ entl y s ome of th e mos t p op u l ar and s u cces s f u l mach ine learn
ing s ys tems u s e tree rep res entations , incl u d ing Qu inl an's I DS algo
rith m [Qu inl an, 1979] and its v ariants .
6
I n th e I DS al gorith m, th e
6
Th e mos t recent v ers ion of th e I DS A l gorith m is cal l ed C 4.5
[Qu inl an, 1993].
concep ts are rep res ented as a d ecis ion tree - a typ e of d irectional
grap h . E ach internal nod e in th e tree is a f eatu re of th e d omain.
E ach ed ge in th e grap h rep res ents a p os s ibl e v al u e of an attribu te of
th e nod e abov e it. E ach leaf nod e of th e tree is a cl as s if ication.
Let u s l ook again at th e Dick Tracy comic book examp l e f rom
abov e. I nternal nod es in a d ecis ion tree are f eatu res of th e s ys tem.
So a nod e cou l d be l abel ed S h if ty eyes . Th e ed ges bel ow th at nod e
wou ld be th e attribu tes of th e f eatu re - TRUE or FALSE. Th e tree
below each of th e attribu te ed ges wou l d rep res ent th e p ath in th e
d ecis ion tree cons is tent with S h if ty eyes being tru e or f al s e.
Th e I DS l earning al gorith m ch oos es th e bes t f eatu re for each new
nod e by s orting th e training s et by th e attribu tes of each p otential
f eatu re. I t meas u res h ow mu ch extra inf ormation abou t th e training
s et each f eatu re ad d s . Th e f eatu re th at ad d s th e mos t u s ef u l inf orma
tion abou t th e training s et is ad d ed to th e d ecis ion tree as th e next
nod e.
1.5.6 Genetic Representations
Genetic or ev ol u tionary rep res entations h av e been ap p l ied in a num
ber of ways . Here we s h al l mention onl y one of th em. We s h al l go
into more d etail abou t oth er p os s ibl e rep res entations in C h ap ter 4.
A genetic al gorith m (GA ) h as f ixed l ength binary s trings . E ach
bit is as s igned a meaning by th e res earch er. Bits may be f reel y as
s igned any meaning and th is l end s great f reed om to th e rep res enta
tion. For examp l e, th e GA need not h av e any of th e inp u ts rep re
s ented in th e bit s tring - th e bit s tring cou l d al s o rep res ent a s eries
of trans f ormations to p erf orm on th e inp u ts . Th e bit s tring can rep
res ent th e weigh ts , bias es , and s tru ctu re of a neu ral network or it can
rep res ent trans f ormations to be p erf ormed for a Bool ean mu l tip l exer
typ e p robl em. Th e bit s tring is th e concep t d ef inition l angu age for
th e GA and th e meaning as s igned to th e bits wou l d be anal ogou s to
th e interp reter.
Th ere are good th eoretical reas ons for s u p p os ing th at th e low
card inal ity of th e bit s tring rep res entation is op timal for GA s earch .
I n p ractice, h owev er, many res earch ers h av e u s ed h igh er card inal ities
in th eir GA rep res entations with great s u cces s [Gol d berg, 1989].
Genetic p rogramming, on th e oth er h and , rep res ents its concep ts
and its interp reter as a comp u ter p rogram or as d ata th at may be
interp reted as a comp u ter p rogram.
7
GP s ys tems are cap abl e of rep -
7
GP s ometimes interp rets th e ou tp u t of its ev olv ed s ol u tions . Th at
occu rs in a wrap p er th at takes th e ou tp u t of th e p rogram and trans f orms
it in s ome manner [Koza, 1992d ]. I n th is cas e, th e interp reter res id es , in a
s ens e, ou ts id e of th e p rogram.
The GA Representation
The GP Representation
res enting th e s ol u tion to a p robl em with any p os s ibl e comp u ter pro
gram. I n f act, at l eas t two GP s ys tems ev ol v e p rograms in l angu ages
p rov abl y Tu ring comp l ete [Tel l er, 1994c] [Nord in and Banzh af , 1995b].
A l l mach ine l earning s ys tems oth er th an GP are or may be ru n
on comp u ters . Th is means th at al l oth er s ys tems of mach ine l earning
may be rep res ented as a comp u ter p rogram. We cou l d s ay, th eref ore,
th at GP is th eoretical l y cap abl e of ev ol v ing an y s ol u tion th at may be
ev ol v ed by any of th e abov e mach ine l earning rep res entations .
Th is is more th an a th eoretical cons id eration. For examp l e:
Q GP s ys tems may (and of ten d o) incl u d e Bool ean op erators .
Bool ean rep res entations are, th eref ore, eas y to ev ol v e in GP.
Q A th res h ol d f u nction is no more th an a p articu l ar ins tantiation
of an IF/THE N s tru ctu re. Giv en th e p rop er f orm of inp u ts ,
GP cou l d ev ol v e th res h ol d f u nctions or th e res earch er cou l d
make th res h ol d f u nctions an exp l icit p art of th e f u nction s et
(s ee C h ap ter 5).
Q C ond itional branch ing s tru ctu res s u ch as IF/THE N or SWITCH
s tatements make it p os s ibl e for GP to ev ol v e d ecis ion trees , or
th e res earch er cou l d cons train th e GP s earch s p ace to p ermit
onl y p rogram s tru ctu res th at p ermit d ecis ion trees to ev ol v e.
Q GP s ys tems may be imp l emented s o th at memory is av ail abl e
for a s ol u tion to s tore as p ects of th e training s et, as wou l d a
cas e-bas ed s ys tem.
Th e p oint h ere is th at th e GP rep res entation is a superset of al l
oth er mach ine l earning rep res entations . Th eref ore, it is th eoretical l y
p os s ibl e for a p rop erl y d es igned GP s ys tem to ev ol v e an y s ol u tion th at
an y oth er mach ine l earning s ys tem cou l d p rod u ce. Th e ad v antage of
th is is al mos t comp l ete f reed om of rep res entation - th e onl y l imits
are wh at a Tu ring-comp l ete comp u ter can d o, and th e s p eed of th e
comp u ter. O n th e oth er h and , th ere are ad v antages to cons trained
rep res entations wh en it comes to cond u cting th e s earch , as we wil l
s ee in th e next s ection.
O ne oth er key as p ect of th e GP rep res entation is th at, u nl ike
many oth er mach ine l earning s ys tems , th e p rograms th at GP ev ol v es
are variable in l ength . For examp l e, a neu ral network, wh il e training,
u s u al l y h as a f ixed s ize. Th is f eatu re may be th e s ou rce of mu ch
of GP's p ower. We wil l s p end s ome time ad d res s ing th is is s u e in
C h ap ter 7.
GP Is a Superset of
Other ML
Representations
1.6 Transforming Solutions with
Search Operators
Th e rep res entation is s u e d is cu s s ed in th e p rev iou s s ection d ef ines th e
s et of al l cand id ate s ol u tions th at may be ev al u ated as p os s ibl e solu
tions to th e p robl em. I t s h ou l d be cl ear by now th at th e nu mber of
cand id ate s ol u tions th at can be ev al u ated by mos t ML s ys tems is h u ge
for non-triv ial p robl ems . E v al u ating th e entire s p ace of all cand id ate
s ol u tions is , h owev er, u s u al l y comp l etel y imp ractical . Th eref ore, each
s ys tem mu s t d ef ine h ow it wil l s earch th rou gh a l imited p ortion of
s u ch l arge s ol u tion s p aces . Th at is , wh ich cand id ate s ol u tion wil l it
ev al u ate f irs t, wh ich next, and next, and wh en wil l it s top ?
Search operators d ef ine how an ML s ys tem ch oos es s ol u tions to
tes t and in wh at ord er. A s s u me th at an ML s ys tem s tarts at s tep 0
and ch oos es a cand id ate s ol u tion to ev al u ate for s tep 1. I t ev al u ates
th at s ol u tion. I t th en rep eats th at p roces s n times for n s tep s or u ntil
some termination criterion is met. S o wh ere 0 < i < n , th e s earch
op erators d ef ine wh at s ol u tion wil l be ch os en for each s tep i + 1 f rom
each s tep i. S earch or trans f ormation op erators , th eref ore, d ef ine
and l imit th e area of th e rep res entation s p ace th at actu al l y wil l be
s earch ed . I t s h ou l d be obv iou s th at a good mach ine l earning s ys tem
wou ld u s e s earch op erators wh ich take a p ath th rou gh s ol u tion s p aces
th at tend s to encou nter good s ol u tions and to byp as s bad ones . S ome
of th e d if f erent typ es of s earch op erators u s ed in mach ine l earning are
d is cu s s ed bel ow.
1.6.1 Generality/Specificity Operators
I n both Bool ean and th res h ol d rep res entations , it is p os s ibl e to con
d u ct a s earch from th e mos t general p os s ibl e s ol u tion to th e mos t
s p ecif ic.
8
For examp l e, in a conju nctiv e Bool ean s ys tem, ev ery time
a new conju nctiv e term is ad d ed to a concep t, th e concep t is more
sp ecific th an p rev iou s l y. Likewis e, in a th res h ol d s ys tem, increas ing
th e th res h ol d makes th e concep t d es cribed by th e th res h ol d u nit more
sp ecific and v ice v ers a [Langl ey, 1996]. I t is on obs erv ations s u ch as
th es e th at general to s p ecif ic trans f ormation op erators were d ev is ed .
8
S earch es may al s o be cond u cted from th e mos t s p ecif ic to th e mos t
general . Howev er, s u ch s earch es are of l imited interes t becau s e th ey tend
to ov erfit with s ol u tions th at are far too s p ecif ic. S ee C h ap ter 8.
I n a s mal l p robl em d omain, one cou l d s tart a general to spe
cific s earch with al l p os s ibl e concep t exp res s ions th at contained one
f eatu re. Th e next l ev el of s earch cou l d ad d one f eatu re, exp res s ed
conju nctiv el y, to each exp res s ion. Th os e exp res s ions th at were incon
s is tent with th e training s et cou l d be d is card ed and th en yet anoth er
term cou l d be ad d ed at a th ird l ev el of s earch . E f f ectiv el y, wh at th is
s earch is d oing is s tarting v ery general and becoming more and more
s p ecif ic.
1.6.2 Gradient Descent Operators
Many neu ral network s ys tems u s e grad ient d es cent op erators to trans
f orm th e networks . Th e weigh ts of th e network are ad ju s ted accord ing
to a grad ient d es cent al gorith m s u ch as back p rop agation or cas cad e
correl ation u ntil a termination criterion is met [Rao and Rao, 1995].
Recal l Figu re 1.3, th e mu l til ayer f eed f orward neu ral network with
th ree inp u ts , two h id d en neu rons , and one ou tp u t. Du ring training
of th is network, th e v al u es of th e weigh ts (w^) between th e neu rons
wou l d be ad ju s ted in s mal l amou nts by a d eterminis tic h il l cl imber
u ntil imp rov ement s top s . To ap p l y th is p roced u re in mu l til ayer feed
f orward neu ral networks , th e error on a training ins tance is "back-
p rop agated " th rou gh th e weigh ts in th e network, s tarting at th e ou t
p u t. Becau s e of th is , th e effect of each ad ju s tment in th e weigh ts is
u s u al l y s mal l - th e s ys tem is taking l ittl e s tep s u p th e l ocal h il l .
Crossover and the
Building Block
Hypothesis
1.6.3 Genetic Programming Operators
I n GP, th e p rimary trans f ormation op erators are "cros s ov er" and
"mu tation" (s ee C h ap ter 5). Mu tation works by ch anging O ne pro
gram; cros s ov er by ch anging two (or more) p rograms by combining
th em in s ome manner. Both are, to a l arge extent, control l ed by
p s eu d o-rand om nu mber generators .
Th e p red ominant op erator u s ed in GP is cros s ov er. I n f act, th e
cros s ov er op erator is th e bas is of th e GP buildin g block hypothesis.
Th at h yp oth es is is an imp ortant p art of th e bas is u p on wh ich GP
makes its cl aim to be more th an a mas s iv el y p aral l el h il l cl imbing
s earch . I n cros s ov er, two p arents are ch os en and a p ortion f rom each
p arent is exch anged to f orm two ch il d ren. Th e id ea is th at u s ef u l
bu il d ing bl ocks for th e s ol u tion of a p robl em are accu mu l ated in th e
p op u l ation and th at cros s ov er p ermits th e aggregation of good bu ild
ing bl ocks into ev er better s ol u tions to th e p robl em [Koza, 1992d ].
If th e bu il d ing bl ock h yp oth es is is correct, th en GP s earch s h ou l d
be more ef f icient th an oth er mach ine l earning s earch tech niqu es (s ee
C h ap ter 6).
Mu tation is th e oth er of th e two main trans f ormation op erators
in GP. A l th ou gh not as p op u l ar as cros s ov er, mu tation is actu al l y
qu ite imp ortant. For ou r p u rp os es h ere, we s h al l d ef ine mu tation as
being any s ort of (rand om) manip u l ation th at can be p erf ormed on
one p rogram al one. We s h al l argu e l ater th at it is actu al l y mu tation
th at brings innov ation to GP.
E l ements of general /s p ecif ic s earch op erators d o ap p ear in GP.
For examp l e, th e op erators d ev is ed by Koza in creating and mod if ying
au tomatical l y d ef ined f u nctions are exp res s l y bas ed on th e general
ity/s p ecif icity ap p roach [Koza, 1994a]. I n ad d ition, many of th e gene
tic op erators in GP cou l d be v iewed as h av ing general ity/s p ecif icity
effects . For examp l e, ad d ing an if -cond itional at th e bottom of a
s u btree is v ery l ikel y to make th at s u btree more s p ecif ic. Remov
ing it h as th e op p os ite ef f ect. A s id e f rom th e au tomatical l y d ef ined
f u nctions , h owev er, al l s u ch exp l oration on th e bas is of general ity and
s p ecif icity h ap p ens onl y as a s id e-ef f ect of th e oth er genetic op erators .
S u ch exp l oration h as not been d el iberatel y d es igned into th e s ys tem.
1.7 The Strategy of the Search
Wh il e th e s earch op erators d ef ine wh at types of ju mp s a s ys tem can
make th rou gh th e s earch s p ace, th e exten t of th e s earch cond u cted is
qu ite a d if f erent matter. Th ere are d if f erent typ es of s earch u s ed in
mach ine l earning s ys tems . We wil l l ook at onl y th ree h ere:
Q Bl ind s earch ,
Q Hil l cl imbing,
Q Beam s earch .
1.7.1 Blind Search
Bl ind s earch means s earch ing th rou gh th e s ol u tion s p ace and p icking
a s ol u tion u s ing no inf ormation abou t th e s tru ctu re of th e p robl em
or res u l ts from p rev iou s s tep s in th e s earch . I n oth er word s , bl ind
s earch p roceed s with ou t knowl ed ge of th e s earch s p ace or th e benef it
of h eu ris tics (ru l es of th u mb) to d irect th e s earch . O f ten, bl ind s earch
mov es th rou gh a tree rep res enting th e s earch s p ace. I n th at tree,
each nod e rep res ents a cand id ate s ol u tion and th e ed ges rep res ent
p ermis s ibl e ju mp s th rou gh th e s earch s p ace among nod es . Th e ed ges ,
th eref ore, rep res ent th e effect of th e s earch op erators .
Bl ind s earch p roceed s th rou gh a tree by ap p l ying a s p ecif ic s trat
egy for mov ement bas ed onl y on th e tree s tru ctu re and wh at nod es
h av e been p rev iou s l y v is ited in th e s earch . Two s u ch s trategies are
Mutation
Other Operators
Blind Search is Based
on Structure Only
bread th -f irs t and d ep th -f irs t tree s earch . Th e f ormer s earch es each
l ev el of th e tree u ntil a good s ol u tion is f ou nd . Th e l atter goes to
th e maximu m d ep th of th e tree d own th e f irs t p ath d ictated by th e
tree. If it reach es a d ead end (a branch with ou t an accep tabl e solu
tion) , d ep th -f irs t s earch backtracks u p th e tree u ntil it f ind s a branch
not yet taken. I t takes th at branch . Th e p roces s continu es u ntil th e
s earch s p ace is comp l etel y exp l ored or th e al gorith m f ind s an accep t
abl e s ol u tion. I n th is f orm, both d ep th -f irs t s earch and bread th -f irs t
s earch rep res ent a typ e of "exh au s tiv e s earch " becau s e th ey s earch
th e tree u ntil it is f inis h ed or an accep tabl e s ol u tion h as been f ou nd .
9
Need l es s to s ay, exh au s tiv e s earch works onl y wh ere th e solu
tion s p ace is v ery s mal l . For genetic p rogramming, exh au s tiv e s earch
wou l d be comp l etel y imp ractical . GP works in a combinatorial s p ace
s u f f ering f rom th e s o-cal l ed cu rs e of d imens ional ity. Th at is , th e vol
u me of th e s ol u tion s p ace increas es s o qu ickl y with th e ad d ition of
new d imens ions th at h ere is no p ractical way to d o an exh au s tiv e
s earch of th at s p ace. Th is p robl em exis ts for mos t mach ine learn
ing s ys tems . For nearl y al l interes ting l earning d omains , th e s earch
s p ace of p os s ibl e s ol u tions is f ar too l arge for exh au s tiv e s earch to be
comp l eted in reas onabl e time f rames .
1.7.2 Hill Climbing
Hil l cl imbing s tarts in one s p ot in th e s earch s p ace, trans f orms th at
s ol u tion, and keep s th e new s ol u tion if it is a better s ol u tion. O th
erwis e th e new s ol u tion is of ten (al th ou gh not al ways ) d is card ed and
th e original s ol u tion is again trans f ormed , ev al u ated , and d is card ed
or kep t u ntil a termination criterion is met. No record is kep t of th e
p ath th at h as been trav ers ed al read y.
S imu l ated anneal ing (S A ) and many neu ral network training al
gorith ms are typ ical of th is ap p roach . O nl y one s ol u tion is cons id ered
at a time and onl y one p ath th rou gh th e s ol u tion s p ace is exp l ored .
S imu l ated anneal ing [Kirkp atrick et al ., 1983] is bas ed on an anal
ogy with th e cool ing of metal in a p roces s cal l ed anneal ing. E arl y in
th e cool ing, th e mol ecu l ar s tru ctu re of th e metal ch anges in l arge
s tep s . By anal ogy, earl y in an S A ru n, th e ch anges are "l arge"
9
Bl ind s earch tech niqu es need not be exh au s tiv e. For examp l e, iterativ e
d eep ening is a h ybrid v ers ion of d ep th -f irs t s earch and bread th -f irs t s earch
th at combines th e s trength s of both s earch s trategies by av oid ing th e ex
tens iv e s torage requ irements for bread th -f irs t s earch and th e extens iv e time
requ irements f or th e d ep th -f irs t s earch . I n a nu ts h el l , it is a cons trained
d ep th -f irs t s earch . A s s u ch , it is an examp l e of an entire cl as s of s earch
s trategies , namel y, p artial s earch es th at d eal with th e trad e-of f between
s earch time and s earch s p ace.
s tep s . A s th e metal cool s , th e ch anges in th e metal s ettl e d own.
SA makes rand om ch anges to an exis ting s ol u tion, retains th e trans
formed s ol u tion if it is better th an th e original s ol u tion, and some
times retains th e trans f ormed s ol u tion if it is wors e. A s an S A ru n
continu es , th e temp eratu re p arameter is d ecreas ed to make th e like
l ih ood of retaining negativ e trans f ormations l es s and l es s . S A h as
been ap p l ied with real s u cces s to p rogram ind u ction by O 'Reil l y
[O 'Reil l y and O p p ach er, 1994a]. Becau s e s imu l ated anneal ing d oes
not u s e a cros s ov er-typ e op erator or maintain a p op u l ation of can
d id ate s ol u tions , h owev er, it is u s u al l y not cl as s if ied as genetic pro
gramming, ev en th ou gh it attacks th e s ame p robl em as d oes GP -
p rogram ind u ction f rom exp erience of th e p robl em d omain.
Neu ral networks are f requ entl y trained with s earch al gorith ms
s u ch as back p rop agation or cas cad e correl ation. A l th ou gh th es e
al gorith ms s eek th e bottoms of v al l eys ins tead of th e top s of h il l s in
th e f itnes s l and s cap e, th ey are p rop erl y categorized as h il l cl imbing
al gorith ms . Unl ike S A , wh ich u s es rand om s tep s , th es e al gorith ms
u s e d eterminis tic s tep s . Th at is , as s oon as th e p arameters and th e
s tarting p oint are ch os en, th e p ath s th e al gorith ms take th rou gh th e
s earch s p ace are al read y d etermined .
Back p rop agation and cas cad e correl ation train th e network in
many d imens ions s imu l taneou s l y by v arying th e v al u es of th e weigh ts
(wij) of th e network (s ee Figu re 1.3) in f ixed s tep s izes . Th e di
rection of each s tep is ch os en u s ing d eriv ativ es to f ind th e op timal
d irection for th e s tep . Wh en a neu ral network is trained u s ing s u ch
an al gorith m, th e ru n wil l s tart at one p oint in th e s ol u tion s p ace
and p roceed al ong one p ath th rou gh th e s p ace to th e bottom of th e
neares t v al l ey.
1.7.3 Beam Search
A ll of th e f oregoing al gorith ms are s ingl e p oint-to-p oint s earch es in
th e s earch s p ace. GA , GP, and beam s earch maintain a population
of s earch p oints . Beam s earch is a comp romis e between exh au s tiv e
s earch and h il l cl imbing. I n a beam s earch , s ome "ev al u ation metric"
is u s ed to s el ect ou t a certain nu mber of th e mos t p romis ing s ol u tions
for f u rth er trans f ormation. A l l oth ers are d is card ed . Th e s ol u tions
th at are retained are th e "beam." I n oth er word s , a beam s earch
l imits th e p oints it can f ind in s earch s p ace to al l p os s ibl e trans f orma
tions th at res u l t f rom ap p l ying th e s earch op erators to th e ind iv id u al s
in th e beam. Beam s earch h as been a wel l -es tabl is h ed tech niqu e in
h eu ris tic mach ine l earning s ys tems for many years [Langl ey, 1996].
A ngel ine recognized in 1993 th at GP is a f orm of beam s earch
becau s e it retains a p op u l ation of cand id ate s ol u tions th at is s mal l er
Back Propagation and
Cascade Correlation
th an th e s et of al l p os s ibl e s ol u tions [A ngel ine, 1993] [Tackett, 1994]
[A l tenberg, 1994b]. His ins igh t rev eal ed a f u nd amental s imil arity be
tween GP and mach ine l earning th at h ad p rev iou s l y been conceal ed
becau s e of GP's roots in ev ol u tionary al gorith ms . Th at is , th e evo
l u tionary nomencl atu re u s ed in GP tend ed to conceal th at GP is a
f l av or of th is v ery p op u l ar mach ine l earning meth od . I n p articu l ar:
Q Th e mach ine l earning ev al u ation metric for th e beam is cal l ed
th e "f itnes s f u nction" in GP.
Q Th e beam of mach ine l earning is ref erred to as th e "p op u l ation"
i nGP.
Mach ine l earning s ys tems h av e op erators th at regu l ate th e s ize,
contents , and ord ering of th e beam. GP of cou rs e regu l ates both th e
contents and ord ering of th e beam al s o. Th e contents are regu l ated by
th e genetic op erators and th e ord ering is , for th e mos t p art, regu l ated
by f itnes s -bas ed s el ection. S imp l y p u t, th e more f it an ind iv id u al , th e
more l ikel y it wil l be u s ed as a ju mp ing-of f p oint for f u tu re exp l oration
of th e s earch s p ace.
10
1.8 Learning
I t may su ffice h ere to qu ickl y name th ree major ap p roach es to learn
ing th at can be u s ed with genetic p rogramming.
1. Supervised learning
S u p erv is ed l earning takes p l ace wh en each training ins tance is
an inp u t accomp anied by th e correct ou tp u t. Th e ou tp u t of a
cand id ate s ol u tion is ev al u ated agains t th at correct ans wer.
Many GP ap p l ications u s e s u p erv is ed l earning - th e f itnes s
f u nction comp ares th e ou tp u t of th e p rogram with th e d es ired
res u l t.
2. Unsupervised learning
Uns u p erv is ed l earning takes p l ace wh en th e ML s ys tem is n ot
10
GP incorp orates a "rep rod u ction" op erator, in wh ich an ind iv id u al is
allowed to d u p l icate its el f u nch anged - so th at, af ter rep rod u ction, th ere
wou ld be two cop ies of th e ind iv id u al in th e p op u l ation. Rep rod u ction
is not a s earch op erator - it makes no ch ange to th e ind iv id u al . I t is
bes t v iewed as a way of regu l ating th e ord ering and contents of th e beam.
I t regu l ates th e contents becau s e rep rod u ction d ou bl es th e nu mber of a
p articu l ar ind iv id u al in th e beam. I t al s o increas es th e l ikel ih ood th at th e
ind iv id u al will be ch os en for f u tu re genetic trans f ormations , th u s it al s o
regu l ates th e ord ering of th e ind iv id u al s in th e beam.
tol d wh at th e correct ou tp u t is . Rath er, th e s ys tem its el f l ooks
for p atterns in th e inp u t d ata.
Th e op eration of a Koh onen neu ral network [Koh onen, 1989] is
a good examp l e of u ns u p erv is ed l earning. Giv en a s et of train
ing ins tances to be cl as s if ied and a s p ecif ication of th e nu mber of
cl as s es to be f ou nd (note no ou tp u ts are giv en to th e network),
a Koh onen network wil l d ev is e its own cl as s es and as s ign th e
training ins tances to th os e cl as s es .
GP is not normal l y u s ed for u ns u p erv is ed training. Howev er,
it wou l d be p os s ibl e to u s e it for th at p u rp os e.
3. Reinforcement learning
Reinf orcement l earning [Barto et al ., 1983] f al l s between s u p er
v is ed and u ns u p erv is ed l earning. A l th ou gh correct ou tp u ts are
not s p ecif ied as in s u p erv is ed l earning, a general s ignal for qu al
ity of an ou tp u t is fed back to th e l earning al gorith m. Th u s ,
th ere is more inf ormation th an in u ns u p erv is ed l earning, al
th ou gh it is rath er u ns p ecif ic.
Many of th e f itnes s f u nctions in GP are more comp l ex th an ju s t
comp aring th e p rogram ou tp u t to th e d es ired ou tp u t. Th es e
s ys tems cou l d be cons id ered as reinf orcement l earning s ys tems .
1.9 Conclusion
From th e abov e it is ap p arent th at, v iewed as ju s t anoth er mach ine
l earning s ys tem, GP may be d es cribed as f ollows :
Q GP rep res ents a p robl em as th e s et of al l p os s ibl e comp u ter pro
grams or a s u bs et th ereof th at are l es s th an a d es ignated l ength .
Th is is one of its great s trength s . Th e GP rep res entation is a
s u p ers et of al l oth er p os s ibl e mach ine l earning rep res entations ;
Q GP u s es cros s ov er and mu tation as th e trans f ormation op era
tors to ch ange cand id ate s ol u tions into new cand id ate s ol u tions .
S ome GP op erators exp l icitl y increas e or d ecreas e th e general
ity of a s ol u tion;
Q GP u s es a beam s earch , wh ere th e p op u l ation s ize cons titu tes
th e s ize of th e beam and wh ere th e f itnes s f u nction s erv es as
th e ev al u ation metric to ch oos e wh ich cand id ate s ol u tions are
kep t in th e beam and not d is card ed ;
G GP typ ical l y is imp l emented as a f orm of s u p erv is ed mach ine
l earning. Howev er, th is is no more th an conv ention. I t is p er-
f ectl y p os s ibl e to u s e GP as a reinf orcement or an u ns u p erv is ed
l earning s ys tem.
GP is th eref ore mos t d is tinctiv e in its u s e of v ariabl e l ength pro
grams to rep res ent cand id ate s ol u tions d u ring training and in its ex
p l icit u s e of anal ogies to ev ol u tionary genetics in its s earch op erators .
C h ap ter 2 wil l l ook cl os el y at th e anal ogy with biol ogy. C h ap ter 7
wil l d is cu s s th e p ower of v ariabl e l ength p robl em rep res entation.
Exercises
1. I s GP concep t rep res entation a s u p ers et of conju nctiv e/d is ju nctiv e
Bool ean and th res h ol d concep t rep res entations ?
2. Wh y is GP concep t rep res entation a s u p ers et of a d ecis ion tree
concep t rep res entation?
3. Wh at is th e interp reter in a GP s ys tem?
4. Dev is e two ru l es , oth er th an GP p op u l ations with natu ral se
l ection, for maintaining a beam d u ring a s earch . Lis t th e ad
v antages and d is ad v antages of each rel ativ e to GP.
5. Wou l d you exp ect cros s ov er or grad ient d es cent to p rod u ce big
ger ju mp s (on av erage) in th e qu al ity of a s ol u tion. Wh y?
6. Des ign a grad ient d es cent training s ys tem for GP. I n d oing s o,
cons id er wh at s ort of op erators cou l d work on a p rogram al ong
a grad ient.
7. Des ign a cons trained s yntax for p rograms s o th at a GP s ys tem
cou l d onl y ev ol v e conju nctiv e Bool ean s ol u tions .
8. Wou l d a s witch -s tatement be a h el p f u l p rogram s tru ctu re to
u s e to cons train GP s o th at it ev ol v ed onl y th res h ol d rep res en
tations ? Wou l d it be h el p f u l for ev ol v ing a d is ju nctiv e Bool ean
s ys tem? Wh y?
9. Des ign a general ity/s p ecif icity mu tation op erator for genetic
p rogramming. Wh en wou l d you u s e it and wh y?
Further Reading
E .A . Bend er,
MA THE MA TI C A L ME THO DS IN A RTI FI C I A L I NTE LLI GE NC E .
I E E E C omp u ter S ociety Pres s , Los A l amitos , C A , 1996.
L. Pack Kael bl ing, M. Littman, A . Moore,
RE I NFO RC E ME NT LE A RNI NG: A S URVE Y.
J. A rtif icial I ntel l igence Res earch 4 237-283, 1996.
P. Langl ey,
E LE ME NTS O F MA C HI NE LE A RNI NG.
Morgan Kau f mann, New York, NY, 1996.
T. Mas ters ,
A DVA NC E D A LGO RI THMS FO R NE URA L NE TWO RKS .
Wil ey, New York, NY, 1995.
T. Mitch el l ,
MA C HI NE LE A RNI NG.
McGraw-Hil l , New York, NY, 1996.
V.B. Rao and H.V. Rao,
C ++ NE URA L NE TWO RKS & FUZZY LO GI C , 2ND E D.
MI T Pres s , New York, NY, 1995.
S . S h ap iro (ed .),
E NC YC LO PE DI A O F A RTI FI C I A L I NTE LLI GE NC E .
Wil ey, New York, NY, 1996.
D. Wh ite and D. S ofge (ed s .),
HA NDBO O K O F I NTE LLI GE NT C O NTRO L.
NE URA L, FUZZY A ND A DA PTI VE A PPRO A C HE S .
Van Nors trand Reinh ol d , New York, NY, 1992.
2 Genetic Programming
and Biology
C ontents
2. 1 Minimal Requirements
for Evolution to Occur 35
2.2 Test Tube Evolution A Study
in Minimalist Evolution 35
2.3 The Genetic Code - DMA as a Computer
Program 39
2.3.1 The DNA Alphabet 40
2.3.2 Codons and Amino Acid Synthesis 41
2.3.3 Polypeptide, Protein, and RNA Synthesis 42
2.3.4 Genes and Alleles 43
2.3.5 DNA without Function - Junk DNA and Introns 45
2.4 Genomes, Phenomes, and Ontogeny 45
2.5 Stability and Variability of
Genetic Transmission 48
2.5.1 Stability in the Transmission of Genetic Material 48
2.5.2 Genetic Variability 49
2.5.3 Homologous Recombination 50
2.6 Species and Sex 53
Looking back into th e h is tory of biology, it ap p ears th at wh erev er
a p h enomenon res embl es l earning, an ins tru ctiv e th eory was f irs t
p rop os ed to accou nt for th e u nd erl ying mech anis ms . I n ev ery cas e,
th is was l ater rep l aced by a s el ectiv e th eory. Th u s th e s p ecies
were th ou gh t to h av e d ev el op ed by l earning or by ad ap tation of
ind iv id u al s to th e env ironment, u ntil Darwin s h owed th is to h av e
been a s el ectiv e p roces s . Res is tance of bacteria to antibacterial
agents was th ou gh t to be acqu ired by ad ap tation, u ntil Lu ria and
Del briick s h owed th e mech anis m to be a s el ectiv e one. A d ap tiv e
enzymes were s h own by Monod and h is s ch ool to be ind u cibl e
enzymes aris ing th rou gh th e s el ection of p reexis ting genes . Final l y,
antibod y f ormation th at was th ou gh t to be bas ed on ins tru ction
by th e antigen is now fou nd to res u l t from th e s el ection of al read y
exis ting p atterns . I t th u s remains to be as ked if l earning by th e
central nerv ou s s ys tem migh t not al s o be a s el ectiv e p roces s ; i.e.,
p erh ap s l earning is not l earning eith er.
N.K. JE RNE , 1967
Genetic p rogramming is th e au tomated l earning of comp u ter pro
grams . GP's l earning al gorith m is ins p ired by th e th eory of ev ol u tion
and ou r contemp orary u nd ers tand ing of biol ogy and natu ral evolu
tion. Viewed as a l earning p roces s , natu ral ev ol u tion res u l ts in v ery
l ong-term l earning from th e col l ectiv e exp erience of generations of
p op u l ations of organis ms . I n oth er word s , ev ery l iv ing creatu re is th e
res u l t of mil l ions of years of l earning by its ances tors abou t h ow to
s u rv iv e on E arth l ong enou gh to rep rod u ce.
I nf ormation l earned th rou gh biol ogical ev ol u tion is regu l arl y s tor
ed in DNA bas e p airs . S equ ences of DNA bas e p airs act l ike ins tru c
tions or p artial ins tru ctions in comp u ter p rograms , med iating th e
manu f actu re of p roteins and th e s equ ence of manu f actu re [E igen, 1992].
Th is p rogram-l ike natu re of DNA , togeth er with th e v ariabl e l ength
s tru ctu re of DNA , exp l ains th e ap p eal of biol ogical ev ol u tion as a
mod el for comp u ter p rogram ind u ction.
O u r ch oice of word s abov e was d el iberate - GP's l earning algo
rith m was in spired by th e th eory of ev ol u tion and mol ecu l ar biol ogy.
No cl aim is mad e h ere or in th e GP commu nity th at th e GP l earning
al gorith m duplicates biol ogical ev ol u tion or is ev en cl os el y mod el ed
on it. A t mos t we can s ay th at GP l earning al gorith ms h av e been
l oos el y bas ed on biol ogical mod el s of ev ol u tion and s exu al rep rod u c
tion. Th is ch ap ter tou ch es on s ome as p ects of ev ol u tion and biol ogy
th at may h el p th e read er u nd ers tand GP.
2.1 Minimal Requirements
for Evolution to Occur
Darwin argu ed th at
. . . if v ariations u s ef u l to any organic being d o occu r, as s u red l y
ind iv id u al s th u s ch aracterized wil l h av e th e bes t ch ance of being 4^}
p res erv ed in th e s tru ggl e for l if e; and f rom th e s trong p rincip l e of
inh eritance th ey wil l tend to p rod u ce of f s p ring s imil arl y ch arac
terized . Th is p rincip l e of p res erv ation, I h av e cal l ed , for th e s ake
of brev ity, Natu ral S el ection.
C . DA RWI N, 1859
I n oth er word s , th ere are f ou r es s ential p recond itions for th e occu r
rence of ev ol u tion by natu ral s el ection:
1. Rep rod u ction of ind iv id u al s in th e p op u l ation;
2. Variation th at af f ects th e l ikel ih ood of s u rv iv al of ind iv id u al s ;
3. Hered ity in rep rod u ction (th at is , l ike begets l ike);
4. Finite res ou rces cau s ing comp etition.
Th os e f actors , Darwin [Darwin, 1859] [Maynard -S mith , 1994] ar
gu ed , res u l t in natu ral s el ection wh ich ch anges (ev ol v es ) th e ch arac
teris tics of th e p op u l ation ov er time. To s ome extent, th e remaind er
of th is ch ap ter wil l be abou t one or more of th es e f actors .
We begin by l ooking at ev ol u tion at work in a v ery s imp l e envi
ronment - l aboratory tes t tu bes .
2.2 Test Tube Evolution A Study
in Minimalist Evolution
E v ol u tion occu rs ev en in s imp l e non-l iv ing s ys tems , s u ch as in vitro
(tes t tu be) env ironments . For examp l e, ev ol u tion may be obs erv ed in
s imp l e exp eriments u s ing th e enzyme Q/3 rep l icas e and RNA . O rgel
h as d one a s eries of s u ch exp eriments [O rgel , 1979] wh ich are an ex
cel l ent s tarting p oint for ou r cons id erations becau s e th ey bear many
s imil arities to GP s ys tems . Th e s ignif icance of th e Qj3 rep l icas e ex
p eriments may onl y be u nd ers tood with s ome knowl ed ge of th e ex
p erimental s etu p , h ence we s h al l d is cu s s th em h ere in more d etail .
Q(3 rep l icas e wil l make an ad equ ate cop y of any s trand of RNA
(as l ong as it h as a s u p p l y of th e monomers f rom wh ich th e new
RNA may be mad e). I magine a s eries of tes t tu bes . E ach tu be
Fast Replicating RNA
contains a s ol u tion of Q(3 rep l icas e and th e p rop er monomer mix.
A l th ou gh th ere are many d if f erent typ es of RNA , an initial RNA
temp l ate containing onl y one typ e of RNA is introd u ced to tes t tu be
1. Th e Q/3 rep l icas e immed iatel y begins making cop ies of th e RNA
temp l ate. A f ter 30 minu tes , take a d rop ou t of tes t tu be 1 and p l ace
it into tes t tu be 2. Th irty minu tes l ater, rep eat th at p roces s from
tes t tu be 2 to tes t tu be 3 and s o on.
Fou r f eatu res of th e Q/3 rep l icas e exp eriments are noteworth y
h ere [O rgel , 1979] [Maynard -S mith , 1994] becau s e genetic p rogram
ming ru ns exh ibit mu ch th e s ame beh av ior.
1. Th e structure an d fun ction of the RNA in th e tes t tu bes ev ol v es ,
of ten d ramatical l y. For examp l e, in one exp eriment, th e s ize of
th e RNA mol ecu l es in tes t tu be 75 were onl y on e-ten th as l ong
as th e mol ecu l es in th e original RNA temp l ate and th e Qf3
rep l icas e was making new RNA mol ecu l es at more th an twen ty
times th e rate in tes t tu be 1. C l earl y, th e RNA p op u l ation h ad ,
in l es s th an a d ay, ev ol v ed to be much s h orter and to rep l icate
much f as ter.
2. Th e mix of RNA in th e last tes t tu be v aries . Howev er, each
exp eriment ev ol v es to a s tabl e and rep eatabl e f inal s tate th at
d ep end s on th e initial cond itions of th e exp eriment. E v ol u tion
ceas es wh en th at s tate h as been reach ed .
3. Dif f erent initial cond itions res u l t in a f inal mix s p ecif ical l y ad ap
ted to th os e cond itions . For examp l e:
Q By red u cing th e amou nt of s ol u tion trans f erred f rom one
tes t tu be to th e next, th e exp eriments is ol ated a s train of
RNA th at cou l d rep rod u ce s u cces s f u l l y ev en if onl y one
RNA mol ecu l e was trans f erred to a new tu be.
Q Wh en th e amou nt of C TP
1
in th e monomer mix was re
d u ced , th e f inal mix contained an RNA s train th at rep ro
d u ced rap id l y bu t h ad rel ativ el y low cytos ine content.
Q Wh en an antibiotic was incl u d ed in th e tes t tu bes , th e f inal
mix contained RNA th at was res is tent to th e antibiotic.
4. Final l y, th e RNA th at ev ol v es in th es e tes t tu be exp eriments
wou l d h av e been extremel y u nl ikel y to ev ol v e by rand om ch ance.
O ne common end p rod u ct in th e Q/3 rep l icas e exp eriments il l u s -
*C TP (f or cytos ine trip h os p h ate) is an energy-rich monomer containing
th e nu cl eotid e cytos ine. I ts energy is cons u med wh en cytos ine is ad d ed to
a s tring of RNA . S imil arl y, A TP, GTP, and UTP are u s ed to el ongate RNA
s trings . . i ., >l:-Ji:n :xj V
trates th es e p oints . Th is end p rod u ct (cal l it "f as t RNA ") is cop ied
v ery qu ickl y by th e Qf3 rep l icas e enzyme for two reas ons :
Q Fas t RNA is onl y 218 bas es l ong and is , th eref ore, v ery s h ort
comp ared to th e original RNA temp l ate (> 4000 bas es ). Th e
s h orter th e RNA , th e f as ter it rep l icates .
Q Th e th ree-d imens ional s tru ctu re of f as t RNA makes it es p ecial l y
eas y for Q(3 rep l icas e to cop y qu ickl y.
I n many of th e Q/3 rep l icas e exp eriments , f as t RNA ev ol v es f rom
th e initial RNA temp l ate u ntil it comp l etel y d ominates th e mix, ev en
th ou gh it was not in th e initial RNA temp l ate [Maynard -S mith , 1994].
RNA is not al iv e. I t cannot cop y its el f . More imp ortant, th ere is
l ittl e or no v ariation in th e initial RNA temp l ate p op u l ation. If mul
tip l ication and v ariation are s u p p os ed l y two neces s ary p recond itions
for th e occu rrence of ev ol u tion, h ow is it th at f as t RNA ev ol v es ?
Th e key l ies in th e f act th at cop ies of RNA p rod u ced by Q(3 rep li
cas e are not al ways p erf ect cop ies . A bou t one in ev ery ten th ou s and
rep l ications res u l ts in errors - bas es are inad v ertentl y ad d ed , d el eted ,
or imp rop erl y trans cribed . I t is th es e errors th at introd u ce v ariabil ity
into th e p op u l ation of RNA . Variants of RNA th at rep rod u ce f as ter
in a Q/3 rep l icas e s ol u tion h av e an ev ol u tionary ad v antage - ov er any
p eriod of time th ey wil l , on av erage, p rod u ce more cop ies th an oth er
typ es of RNA . A l th ou gh it may take many rep l ication errors to mov e
from th e initial RNA temp l ate (ov er 4000 bas e p airs in l ength ) to
fast RNA (onl y 218 bas e p airs in l ength ), natu ral s el ection op erating
on tiny v ariants is abl e to accomp l is h s u ch a trans ition in f airl y s h ort
ord er.
I nd u cing th e f as t RNA s tru ctu re in l es s th an geol ogic time s cal es
is , by its elf , a remarkabl e accomp l is h ment. C ons id er th e magnitu d e
of th e tas k. Th ere are more th an 10
128
p os s ibl e RNA mol ecu l es of
218 bas e p airs in s ize. To s amp l e th em one by one wou l d take l onger
th an th e age of th e u niv ers e. A ccord ingl y, f ind ing th e f orm of f as t
RNA wou l d be v ery u nl ikel y u s ing rand om s earch , ev en if we knew
th e correct nu mber of bas e p airs (218) in ad v ance. We may s af el y
concl u d e th at ev ol u tionary s earch can, th eref ore, l earn good s ol u tions
mu ch more rap id l y th an rand om s earch and with no knowl ed ge abou t
wh at th e f inal p rod u ct s h ou l d l ook l ike.
E igen writes th at th e p ower of ev ol u tionary s earch res id es in th e
p op u l ation. I n exp l oring th e s earch s p ace f rom many p oints in p aral
lel, ev ol u tionary s earch can al l ocate more trial s to s u p erior mu tants ,
with th e res u l t th at:
Th e (qu antitativ e) accel eration of ev ol u tion th at th is brings abou t
is so great th at it ap p ears to th e biol ogis t as a s u rp ris ingl y new
The Power of Simple
Evolutionary Search
"Test Tube" Evolution
with an Explicit Fitness
Function
Lessons for Genetic
Programming
quality, an ap p arent abil ity of s el ection to 's ee ah ead ', s ometh ing
th at wou l d be v iewed by cl as s ical Darwinians as th e p u res t h eres y!
M. E lGE N, 1992
O rgel 's ev ol u tion of f as t RNA was an earl y d emons tration of th e
p ower of s imp l e ev ol u tionary s earch . O rgel 's mech anis m was d if f erent
from GP in th at O rgel d id not u s e a d ef ined f itnes s f u nction for selec
tion. Rath er, O rgel 's s el ection mech anis m was inh erent in th e exp er
imental s etu p , wh ich s el ected for f as t rep l icating RNA mol ecu l es . By
way of contras t, Tu erk and Gol d [Tu erk and Gol d , 1990] h av e d ev is ed
tech niqu es to ev ol v e RNA and p rotein trans l ation comp l exes u s ing
an exp res s l y d es igned s el ection mech anis m - in GP terms , a "f itnes s
f u nction." Tu erk and Gol d cal l th eir p roced u re S E LE X, wh ich s tand s
for "s ys tematic ev ol u tion of l igand s by exp onential enrich ment."
S E LE X s tarts with a d iv ers e p op u l ation of RNA mol ecu l es . Th is
brew of RNA mol ecu l es is th en p as s ed th rou gh an "af f inity col u mn,"
in wh ich RNA mol ecu l es th at bind (at l eas t weakl y) to a target
molecule are recov ered and th en rep l icated . Th is p roced u re is re
p eated by p as s ing th e rep l icated RNA th rou gh th e af f inity col u mn
again and again. Note: al l of th e el ements for ev ol u tion are p res ent
in Tu erk and Gol d 's S E LE X al gorith m - v ariation and s el ection, rep li
cation and h ered ity. Th eir res u l ts were, in retros p ect, not s u rp ris ing.
A f ter f ou r rou nd s of s el ection and rep l ication Tu erk and Gol d h ad
ev ol v ed a p op u l ation of RNA mol ecu l es with s trong, s el ectiv e bind
ing to th e target mol ecu l e in th e af f inity col u mn.
Bartel and S zos tak h av e u s ed a S E LE X ap p roach to ev ol v e ri-
bozymes cu s tomized to catal yze a p articu l ar ch emical reaction. Bar
tel and S zos tak ch aracterize th eir ap p roach as "iterativ e in vitro se
l ection." Th e cu s tomized ribozymes were ev ol v ed f rom a rand om
p op u l ation of ribozymes . Th e ev ol v ed ribozymes were v ery ef f ectiv e
at catal yzing th e ch os en reaction - two to th ree ord ers of magnitu d e
more ef f ectiv e th an th e mos t ef f ectiv e ribozyme l ocated by rand om
s earch [Bartel and S zos tak, 1993].
Th ere are a nu mber of imp ortant l es s ons for genetic p rogrammers
in th es e s imp l e bu t el egant exp eriments :
Q A s imp l e s ys tem may ev ol v e as l ong as th e el ements of mu lti
p l ication, v ariance, and h ered ity exis t.
Q E v ol u tionary l earning may occu r in th e abs ence of life or of
s e//-rep l icating entities .
Q E v ol u tionary l earning may be a v ery ef f icient way to exp l ore
l earning l and s cap es .
Q E v ol u tion may s tagnate u nl es s th e s ys tem retains th e abil ity to
continu e to ev ol v e.
Q Th e s el ection mech anis m for ev ol u tionary l earning may be im
p l icit in th e exp erimental s etu p (O rgel ) or may be exp l icitl y
d ef ined by th e exp erimenter (S E LE X).
Th e ev ol u tion of a s imp l e p op u l ation of RNA in tes t tu bes is ,
of cou rs e, a "toy" mod el in comp aris on to th e comp l exity of actu al
ev ol u tion occu rring in p op u l ations of l iv ing organis ms . Bu t s o too
is genetic p rogramming. I n f act, in many ways , th es e s imp l e RNA
mod el s are good s tarting p oints for s tu d ying genetic p rogramming be
cau s e th ey ignore many of th e comp l exities encou ntered in s tu d ying
ev ol u tion in l iv ing organis ms - th e s ep aration of genotyp e and p h e-
notyp e, th e ap p aratu s for rep rod u ction, s exu al recombination, and
ontogeny to name bu t a few.
We wil l , of cou rs e, mov e on and d is cu s s s ome as p ects of th e evolu
tion of l iv ing organis ms . Bu t it is imp ortant to keep in mind th at th e
comp l exity th at accomp anies natu ral ev ol u tion is n ot a cond ition for
th e occu rrence of ev ol u tion. Biol ogical ev ol u tion as we h av e come to
u nd ers tand it is th e manner in wh ich ev ol u tion exp res s es its el f giv en
th e comp l ex s et of cons traints imp os ed by organic ch emis try, DNA
s ynth es is and rep l ication, p rotein manu f actu re and f u nctional ity, and
th e f itnes s l and s cap e encou ntered by l iv ing organis ms . E v ol u tion is
n ot th e comp l exity its el f . E v ol u tion is a p roces s , an al gorith m if
you wil l , th at occu rs s p ontaneou s l y both in comp l ex p op u l ations of
l iv ing organis ms and in mu ch s imp l er s ys tems s u ch as th e in vitro
RNA exp eriments and genetic p rogramming ru ns as l ong as certain
cond itions are met.
Nev erth el es s , biol ogical ev ol u tion is th e s ingl e bes t examp l e we
h av e of ev ol u tion at work. GP h as d el iberatel y imitated its mech a
nis m in a nu mber of ways . S o we wil l now take a l ook at imp ortant
as p ects of natu ral ev ol u tion. O u r trip th rou gh mol ecu l ar biol ogy and
p op u l ation genetics wil l neces s aril y be brief and greatl y ov ers imp l i
f ied .
2.3 The Genetic Code - DNA as a Computer
Program
DNA , th e p rincip al cons titu ent of th e genome, may be regard ed as a
comp l ex s et of ins tru ctions for creating an organis m. Hu man DNA
is comp ris ed of ap p roximatel y th ree bil l ion bas e p airs . Many s p ecies
h av e DNA many times l onger th an h u man DNA . Wh il e th e num
ber of ins tru ctions contained in one s trand of DNA p robabl y d warf s
Occam's Evolutionary
Razor
The Genetic Code in
Brief
Figure 2.1
Base pairs in a DNA
segment
th e nu mber of ins tru ctions in al l s of tware ev er written by h u mans ,
th e mech anis m by wh ich DNA s tores ins tru ctions for th e creation of
organis ms is s u rp ris ingl y s imp l e.
I n brief ov erv iew, th e bas ic u nit of th e genetic cod e is th e DNA
bas e p air. Th ree DNA bas e p airs combine to f orm a cod on, wh ich
cod es for th e p rod u ction of an amino acid . S equ ences of cod ons cod e
for th e as s embl y of amino acid s into RNA , p ol yp ep tid es (p rotein
f ragments ), p roteins , or f u nctional RNA . Th e p rod u cts s o f ormed
med iate th e growth and d ev el op ment of organis ms .
2.3.1 The DNA Alphabet
Bas e p airs are th e l ow-l ev el al p h abet of DNA ins tru ctions - each p air
rep res enting, s ay, p art of an ins tru ction for th e creation of a p articu l ar
amino acid . A bas e p air is comp ris ed of two nu cl eic acid bas es th at
are ch emical l y bond ed .
O nl y f ou r d if f erent bas es ap p ear in DNA , ad enine, gu anine, cy-
tos ine, and th ymine, abbrev iated A , G, C, and T, res p ectiv el y. Th e
ru l es for bas e p airings are s imp l y A p airs with T; G p airs with C.
2
Th u s , any one of th e f ol l owing f ou r bas e p air conf igu rations comp ris es
a s ingl e p iece of inf ormation in th e DNA mol ecu l e:
Th e bas e p airs th en bond to each oth er, f orming a l ad d er of bas e
p airs th at, becau s e of th e th ree-d imens ional p rop erties of th e s trand s ,
f orms a d ou bl e h el ix. A s ection of DNA of s ix bas e p airs in l ength is
s h own in Figu re 2.1.
E ach bas e (p air) cou l d th u s be regard ed as th e equ iv al ent of a
bit in th e DNA comp u ter. E ach DNA inf ormation el ement h as a car
d inal ity of -f p u r becau s e th ere are f ou r p os s ibl e bas e p airs . Note th e
A ctu al l y, oth er p airings are p os s ibl e, bu t mu ch les s s tabl e.
el egance of th is s tru ctu re. E ach of th e s trand s of DNA is red u nd ant -
for examp l e, if a G ap p ears in one s trand , a C mu s t ap p ear in th e s ame
p os ition in th e oth er s trand . Th e entire DNA mol ecu l e cou l d be re
cons tru cted f rom ju s t one of th e two s trand s . I n f act, DNA h as many
rep air mech anis ms th at exp l oit th is red u nd ancy [Wats on et al ., 1987,
p ages 347-348].
2.3.2 Codons and Amino Acid Synthesis
I n a comp u ter p rogram, a bit is onl y p art of an ins tru ction to th e
C PU. Th e entire ins tru ction is comp ris ed of a s equ ence of bits . Th e
s ame is tru e in DNA . E ach l ow-l ev el ins tru ction in DNA is actu al l y
comp ris ed of a s equ ence of th ree bas e p airs . Th ree cons ecu tiv e RNA
bas es are a "cod on." Us ing th e abbrev iations for th e bas e p airs abov e,
a typ ical cod on wou l d be rep res ented by biol ogis ts as "A GA ," wh ich
wou ld s ymbol ize a cod on comp ris ed of an ad enine, gu anine, ad enine
s equ ence.
A cod on is a temp l ate for th e p rod u ction of a p articu l ar amino
acid or a s equ ence termination cod on. A few examp l es of cod ons
and th e amino acid s for wh ich th ey cod e are: A TG wh ich cod es for
meth ionine; CA A wh ich cod es for gl u tamine; CA G wh ich al s o cod es
for gl u tamine.
I n al l , th ere are s ixty-f ou r d if f erent cod ons - th at is , th ere are
s ixty-f ou r d if f erent ways to ord er f ou r d if f erent bas es in th ree d if f erent
l ocations . Bu t, th ere are onl y twenty amino acid s for wh ich DNA
cod es . Th is means th at al l amino acid s and a s top ord er cod on (a
cod on th at s ays "qu it h ere") cou l d be s p ecif ied with onl y twenty
cod ons . Wh at h ap p ens to th e res t of th e cod ons ? Th e ans wer is th at
th ere are of ten s ev eral d if f erent cod ons th at p rod u ce th e s ame amino
acid . A n examp l e is s h own abov e: th e cod ons CA G and CA A both
cod e for th e p rod u ction of th e amino acid gl u tamine.
Th is red u nd ancy in DNA 's cod ing for th e s ame amino acid s may
be of s ome imp ortance in GP for two reas ons :
Q Th e ef f iciency of d if f erent cod ons in p rod u cing th e same amino
acid can v ary wid el y from cod on to cod on. Mu l tip l e cod ons
th at trans cribe for th e s ame amino acid at d if f erent rates may
be of s ome imp ortance in mu tation. S imp l y p u t, th is effect
al l ows rand om mu tation - normal l y a h igh l y d es tru ctiv e ev ent -
to accomp l is h a rel ativ el y s mal l ch ange in p h enotyp ic beh av ior.
Wh en one cod on th at p rod u ces gl u tamine is mu tated to anoth er
cod on th at al s o p rod u ces gl u tamine, th e mos t th at ch anges is
th e rate of p rod u ction of th e p rotein in wh ich th e gl u tamine is
incl u d ed . Th e p rotein its el f is not ch anged .
Codons
Codon Redundancy
Small or Neutral
Mutations
DNA Instruction
Sequencing
Q Kimu ra h as noted th e p os s ibl e imp ortance th at neu tral mu ta
tion p l ays in ev ol u tion [Kimu ra, 1983]. Wh ere th e trans l ation
rate of two d if f erent cod ons th at p rod u ce th e s ame amino acid
is rou gh l y bal anced , red u nd ancy in cod ing for amiiio acid s pro
v id es one imp ortant rou te for s u ch neu tral mu tations . Th at
is , if th e s egment of bas e p airs th at p rod u ces a cod on for s er-
ine is mu tated to p rod u ce anoth er one of th e s erine p rod u cing
cod ons , th e f u nctional ity of th e DNA is u nch anged al th ou gh
th e s tru ctu re of th e DNA h as been ch anged .
3
If DNA were no more th at a col l ection of cod ons th at amou nt to
"ins tru ctions ," th e anal ogy between DNA and a comp u ter p rogram
wou l d be weak ind eed . A comp u ter p rogram h as an ad d itional ele
ment - th e ins tru ctions h av e a s equ ence of execu tion. S o, too, d oes
DNA . Th is s equ ence aris es f rom th e f act th at ad jacent bas e p airs
bind f rom a 5 p rime s ite to a 3 p rime s ite. Th at bond is d irectional
f rom th e 5 p rime to th e 3 p rime s ite. Th is d irectional v ector is u s ed
by th e organis m in p rotein s ynth es is . I n s h ort, DNA not onl y h as
ins tru ctions with s p ecif ic meanings , th e ins tru ctions h av e an imp l icit
ord er of execu tion al s o.
DNA Transcriptional
Segments
2.3.3 Polypeptide, Protein, and RNA Synthesis
C od ons p rod u ce amino acid s . Bu t th e end p rod u ct of DNA ins tru c
tions is not to p rod u ce amino acid s . Rath er, DNA acts on th e res t
of th e worl d by providin g the in formation neces s ary to manu f actu re
p ol yp ep tid es , p roteins , and non-trans l ated RNA (tRNA and rRNA )
mol ecu l es , each of wh ich carry ou t v ariou s tas ks in th e d ev el op ment
of th e organis m. Proteins are comp l ex organic mol ecu l es th at are
mad e u p of many amino acid s . Pol yp ep tid es are p rotein f ragments .
Non-trans cribed RNA is an RNA mol ecu l e (s imil ar to DNA bu t hav
ing onl y a s ingl e s trand ) th at is not merel y an intermed iate s tep in
th e p rod u ction of a p rotein or a p ol yp ep tid e.
Th e intricacies of h ow DNA cau s es th e p rod u ction of p roteins ,
p ol yp ep tid es , and RNA is f ar beyond th e s cop e of th is ch ap ter and
th is d is cu s s ion gl os s es ov er many comp l exities s u ch as th e s ynth es is
of mes s enger RNA , tRNA , and th e l ike. General l y s p eaking, DNA
trans cribes RNA mol ecu l es , wh ich th en trans l ate into one or more
p roteins or p ol yp ep tid es . Th e p oint h ere is th at th ere are s egments
3
I n many circu ms tances , f u rth er red u nd ancy lies in th e p rotein s tru c
tu res th at are p rod u ced by th e s equ ences of cod ons . S ome amino acid s in
a p rotein may be rep l aced by anoth er with l ittl e or no ch ange in p rotein
f u nctional ity. I n th is cas e, a mu tation ih at s witch ed for cod ing from amino
acid 1 to amino acid 2 wou ld be f u nctional l y neu tral [Wats on et al ., 1987].
of DNA th at engage in trans crip tional activ ity. Trans crip tional ac
tiv ity is neces s ary, for th e d irect or ind irect s ynth es is of th e brew of
p ol yp ep tid es , p roteins , and RNA mol ecu l es p rod u ced by DNA . A s
Wats on et al . p u t it:
DNA mol ecu l es s h ou l d th u s be f u nctional l y regard ed as l inear col
l ections of d is crete trans crip tional u nits , each d es igned for th e syn
th es is of a s p ecif ic RNA mol ecu l e.
J.D. WA TS O N E T A L., 1987
2.3.4 Genes and Alleles
Th is brings u s to th e d if f icu l t tas k of d ef ining genes and al l el es . I n
p op u l ar l iteratu re, a gene is a l ocation on th e DNA th at d ecid es
wh at col or you r eyes wil l be. S l igh t v ariations in th at l ocation make
you r eyes green or brown. Th e v ariations are cal l ed "al l el es ." Th is
exp l anation greatl y ov ers imp l if ies wh at we know abou t DNA and
th e manner in wh ich it med iates th e creation of an organis m. S u ch a
notion of a gene is mis l ead ing, p articu l arl y wh en it comes to d es igning
a GP s ys tem arou nd s u ch an exp l anation. Wh at biol ogis ts try to
exp res s with th e concep ts of "gene" and "al l el es " is more comp l ex:
Q A d jacent s equ ences of DNA d o act togeth er to affect s p ecif ic
traits . Bu t a s ingl e gene can affect more th an one trait. More
ov er, DNA at wid el y s cattered p l aces on th e DNA mol ecu l e may
affect th e s ame trait. For examp l e, th e s ynth es is of th e amino
acid arginine is med iated by eigh t s ep arate enzymes (p roteins ).
E ach of th os e enzymes is created by a d if f erent gene l ocated in
a d if f erent p l ace on th e DNA [Wats on et al ., 1987, p ages 218-
219].
Q Th e p ortions of th e DNA th at engage in trans crip tional activ ity
(th e genes ) are s ep arated by l ong s equ ences of DNA th at h av e
no ap p arent f u nction cal l ed "ju nk DNA ." Ju nk DNA is , for al l
we know, ju s t inert. I t d oes not ev er activ ate to trans cribe or
affect th e trans crip tion p roces s . C l earl y, ju nk DNA d oes not
qu al if y as a gene.
4
Q Th e p ortions of DNA th at engage in trans crip tional activ ity are
l ocated in th e regions between th e l ong ju nk DNA s equ ences
ref erred to abov e. Genes are, th eref ore, l ocated in th es e regions
al s o. Howev er, not al l of th e intragenic DNA s equ ence engages
4
Th ere is d is cu s s ion in th e biol ogical commu nity wh eth er ju nk DNA is
real l y ju nk or not; s ee l ater s ections of th is ch ap ter.
in trans crip tion. Th es e intragenic s equ ences are comp ris ed in
p art of al ternating s ections of "exons " and "introns ."
Pu t s imp l y, exons trans cribe for p roteins , p ol yp ep tid es or mRNA .
I ntrons , on th e oth er h and , are remov ed f rom th e RNA bef ore
trans l ation to p roteins . Ju nk DNA h as no ap p arent effect on
th e organis m. I t is , ap p arentl y, inert. A l th ou gh it wou l d s eem
th at introns s h ou l d be equ al l y inert (th ey are not trans cribed
to mRNA and are th eref ore not exp res s ed as p roteins ), th e is
s u e is not s o cl ear. Th e p res ence of and contents of introns
f requ entl y h av e a meas u rabl e effect on th e amou nt and biolog
ical effect of p roteins p rod u ced by th e gene in wh ich th ey oc
cu r [Wats on et al ., 1987, 867-868] [Maniatis , 1991] [Ros e, 1994]
[McKnigh t et al ., 1994]. I t may al s o be th at introns p l ay a rol e
in p rev enting d amage to exons d u ring recombination and in en
abl ing th e ev ol u tionary p roces s to exp eriment with s h u f f ling and
combining s l igh tl y d if f erent v ariations of th e f u nctional p arts
th at make u p a p rotein [Wats on et al ., 1987, 645-646]. We wil l
d eal with th is is s u e at s omewh at greater l ength in C h ap ter 7.
U DNA 's f u nctions - ev en th os e we know abou t - are mu ch more
comp l ex th an th e trans l ation of p ol yp ep tid es and p roteins . Th e
intragenic s equ ences ref erred to abov e al s o contain "control se
qu ences " th at tu rn th e trans l ation of p roteins and p ol yp ep
tid es in oth er DNA s equ ences on and off [Wats on et al ., 1987,
p age 233], al mos t a "wet" f orm of cond itional branch ing or of
GOTO s tatements . Wh eth er to incl u d e th es e control s equ ences
as "genes " is not at al l cl ear.
Need l es s to s ay, th es e ambigu ities h av e l ead to more th an one
d ef inition of a gene among biol ogis ts . For examp l e, biol ogis ts h av e at
v ariou s times d ef ined a gene as th e s egment or s egments of DNA th at
p rod u ced a s ingl e p rotein - th e "one gene-one p rotein" ru l e. More
recentl y, oth ers h av e s u gges ted th at, in real ity, DNA s equ ences of ten
cod e for l es s th an a p rotein. Th ey cod e for p ol yp ep tid e s equ ences ,
wh ich may be combined into p roteins . Th is h as l ead to th e "one
gene-one p ol yp ep tid e" ru l e [Wats on et al ., 1987, p age 220].
Wats on et al . concl u d e th at th e bes t working d ef inition wou l d :
. . . res trict th e term gen e to th os e DNA s equ ences th at cod e for
amino acid s (and p ol yp ep tid e ch ain termination) or th at cod e for
f u nctional RNA ch ains (e.g. tRNA and rRNA ), treating al l tran-
s crip tional control regions as extragenic el ements . DNA ch romo
s omes , so d ef ined , wou ld be l inear col l ections of genes inters p ers ed
with p romoters , op erators , and RNA ch ain termination s ignal s .
J.D. WA TS O N E T A L., 1987
The One Gene-One
Protein Rule
Th e l es s on h ere, with res p ect to genes , al l el es , and oth er DNA
s tru ctu res is to be very careful wh en ap p l ying s u ch concep ts to an
oth er med iu m s u ch as d igital comp u ters . Biol ogis ts are h ard p res s ed
to agree on a d ef inition. Th e f irs t qu es tion in ap p l ying s u ch concep ts
to new med ia is to d ef ine cl earl y wh at is meant in th e f irs t med iu m
and th en to d etermine wh eth er th e term h as any meaning at al l wh en
ap p l ied to th e oth er med iu m. A s we wil l s ee in l ater ch ap ters , th es e
terms may h av e l ittl e or no meaning in a GP p op u l ation mad e u p of
rand oml y generated comp u ter p rograms .
2.3.5 DNA without Function - Junk DNA and Introns
We h av e been s p eaking abov e abou t s equ ences of DNA th at h av e
a f u nction - th ey create p roteins or p ol yp ep tid es or control th eir
creation. Bu t mu ch of th e DNA of many organis ms ap p arentl y ju s t
s its th ere and d oes noth ing. Th is is ref erred to as ju nk DNA and as
introns . Th e word apparen tly is imp ortant h ere. We know th at ju nk
DNA and introns are not "trans crip tional s egments " of DNA - th ey
d o not cod e for p roteins . O n th e oth er h and , p rov ing th at th ey d o
not cod e for p roteins d oes not p rov e th at ju nk DNA and introns d o
not h av e f u nctions of wh ich we are u naware.
A l l bu t a few p ercent of th e DNA of eu karyotic organis ms (al l
h igh er organis ms are eu karyotic) cons is t of non-cod ing DNA com
p ris ing ju nk DNA , control regions , and introns . O n th e oth er h and ,
p rocaryotes (many of th e bacteria s p ecies ) h av e no introns at al l .
Th e reas on for th e exis tence of ju nk DNA and introns is th e su b
ject of d ebate in th e biol ogical commu nity. We h av e noted abov e th at
introns h av e s ome rol e in increas ing th e efficiency of p rotein trans l a
tion. I n any ev ent, ju nk DNA and introns wil l h av e s ome imp ortance
l ater as we examine ap p arent GP anal ogs of th e intron s tru ctu res
th at emerge s p ontaneou s l y d u ring GP ev ol u tion, in C h ap ter 7.
We h av e s p ent s ome time in th e mol ecu l ar worl d of DNA , p ol yp ep
tid es and th e l ike. I t is now time to d is cu s s th e rel ations h ip between
th e tiny-s cal e worl d of DNA and th e mu ch l arger worl d of th e organ
is ms DNA creates .
2.4 Genomes, Phenomes, and Ontogeny
I n 1909, Joh anns en real ized th at it was imp ortant to d is tingu is h be
tween th e ap p earance of an organis m arid its genetic cons titu tion. He
coined th e word s phen otype and gen otype to l abel th e two concep ts
[Joh anns en, 1911]. Th e d is tinction is s til l an imp ortant one. Evo
l u tion interacts d if f erentl y with th e genotyp e and th e p h enotyp e in
biol ogical ev ol u tion. I n GP, th e d is tinction is more el u s iv e. S ome GP
s ys tems exp l icitl y d is tingu is h between th e genotyp e and p h enotyp e
[Gru au , 1992a] [Banzh af , 1993a] [Kel l er and Banzh af , 1996], wh ereas
oth ers [Koza, 1992d ] [Nord in et al ., 1995] d o not.
Th e genome or genotyp e of an organis m is th e DNA of th at or
ganis m.
5
Half of th e genome (DNA ) is p as s ed f rom p arent to ch il d .
Th u s , h ered ity is p as s ed th rou gh th e genome. Th e genome is al s o th e
p rincip al mech anis m for v ariance with in a p op u l ation becau s e genetic
ch anges cau s ed by mu tation and recombination are p as s ed with th e
genome.
Th e p h enome or p h enotyp e is th e s et of obs erv abl e p rop erties
of an organis m. I n a col l oqu ial s ens e, th e p h enotyp e is th e bod y
and th e beh av ior of th e organis m. Natu ral s el ection acts on th e
p h enotyp e (not on th e genotyp e) becau s e th e p h enotyp e (th e bod y)
is neces s ary for biol ogical rep rod u ction. I n oth er word s , th e organis m
(th e p h enotyp e) mu s t s u rv iv e to rep rod u ce.
O ntogeny is th e d ev el op ment of th e organis m f rom f ertil ization
to matu rity. O ntogeny is th e l ink between th e genotyp e (DNA ), th e
p h enotyp e (th e organis m's bod y and beh av ior), and th e env ironment
in wh ich th e organis m's d ev el op ment takes p l ace. Th e organis m's
DNA med iates th e growth and d ev el op ment of th e organis m f rom
birth to d eath . Th e env ironment of th e organis m is f requ entl y an
imp ortant el ement in d etermining th e p ath of d ev el op ment d ictated
by th e DNA .
I n biol ogical ev ol u tion, ontogeny is a one-way s treet. Th at is ,
ch anges in an organis m's DNA can ch ange th e organis m. Howev er,
excep t in rare ins tances [Maynard -S mith , 1994], ch anges in th e organ
is m d o not affect th e organis m's DNA . Th u s , th e v il l age bl acks mith
may h av e a l arge s on. Th e s on is l arge becau s e h is f ath er p as s ed
DNA for a l arge bod y to th e s on, not becau s e th e f ath er bu il t u p
h is own mu s cl es th rou gh a l ot of p h ys ical l abor bef ore s iring h is s on.
Th e bl acks mith 's acqu ired trait of l arge mu s cl es is , emp h atical l y, not
p as s ed on to th e bl acks mith 's s on. I gnoring th e comp l ication of sex
u al rep rod u ction, Figu re 2.2 d iagrams th is mech anis m.
A l l of th e mech anis ms of biol ogical h ered ity (cop ying th e p arent's
DNA and p as s ing it to th e ch il d , mu tation of th e p arent's DNA , and
recombination of th e p arent's DNA ) take p l ace at th e genotyp e (G)
l ev el . O n th e oth er h and , natu ral s el ection acts onl y at th e l ev el of th e
5
Th is s imp l e d ef inition glos s es ov er th e d if f erence between p rocaryotic
and eu karyotic organis ms . For eu karyotes , it wou ld be more accu rate to
d efine th e genome as th e genes contained in a s ingl e rep res entativ e of al l
ch romos ome p airs . Becau s e th e mos t imp ortant cons titu ent in th e ch romo
s ome p airs is DNA , th e d ef inition in th e text is s u fficient for ou r p u rp os es \
G = Genotype (DNA)
P = Phenotype (the organism)
p h enotyp e (P). Th eref ore, natu ral s el ection acts u p on th e genotyp e
only ind irectl y.
Th e RNA in vitro exp eriments d is cu s s ed abov e h av e mu ch to
say abou t th e d es ign of GP s ys tems in regard to s ep aration of th e
genotyp e and th e p h enotyp e and in regard to ontogeny:
Q Evolution is possible even where there is no physical
difference between the genotype and the phenotype.
I n biol ogical ev ol u tion, th e DNA (genotyp e) is qu ite d is tinct
from th e organis m's bod y and beh av ior (p h enotyp e). By way
of contras t, th e RNA in O rgel 's exp eriments h as no p h enotyp e
th at is s ep arate from th e genotyp e (th e RNA its el f ).
6
Th e
RNA d oes , h owev er, engage in behavior th at cou l d be regard ed
as p h enotyp ical . S imil arl y, in GP, th e genotyp e is th e ev ol v ed
p rogram and , in many s ys tems , th ere is no s ep arate p h enotyp e.
Bu t th e behavior of th e GP p rogram wh en it execu tes is , l ike
th e RNA 's beh av ior af ter f ol d ing, p h enotyp ical beh av ior.
Wh il e s ome p h enotyp ical beh av ior on wh ich natu ral s el ection
can act ap p ears to be a neces s ary comp onent of ev ol u tion, a
s ep arate s tru ctu re th at may be l abel ed th e "p h enotyp e" is not.
G Evolution is possible with or without ontogeny.
Th e RNA exp eriments al s o s u gges t th at ontogeny is not a re
qu irement of ev ol u tion. I n th e O rgel exp eriments , th e RNA
d id not u nd ergo any d ev el op ment p roces s between rep rod u c
tion ev ents .
7
6
O ne cou l d argu e th at th e fold ed RNA s trand is p h ys ical l y d if f erent
from th e u nf ol d ed s trand and th u s cons titu tes a p h enotyp e.
7
O ne cou l d argu e th at th e temp eratu re cond itions requ ired for f old ing
of RNA are th e ap p rop riate env ironment and th e f old ing p roces s its el f is
ontogeny.
Th e l es s on h ere for GP is th at it is not neces s ary to create a
s ep arate p h enotyp e s tru ctu re from a genotyp e by s ome s ort of onto-
l ogical p roces s . Howev er, ontogeny and a s ep arate p h enome are tools
th at may be u s ed by th e GP res earch er to imp rov e th e qu al ity of GP
s earch . O ne examp l e of GP's u s e of s u ch tool s is th e cel l u l ar encod ing
tech niqu e, wh ich exp l icitl y u s es th e genotyp e (a tree GP s tru ctu re)
to d ef ine a p roces s of ontogeny by wh ich a s ingl e "p rimord ial " neu
ron d ev el op s into an el egantl y comp l ex neu ral network s tru ctu re (th e
p h enotyp e) [Gru au , 1992a]. More recentl y, f inite au tomata h av e been
treated in a s imil ar way [Brav e, 1996].
2.5 Stability and Variability of
Genetic Transmission
Th e way genetic material is p as s ed from th e p arent to th e ch il d is th e
mos t imp ortant f actor in d etermining genetic s tabil ity (l ike begets
l ike) and th e genetic v ariabil ity in a p op u l ation. For ev ol u tion to
occu r, genetic trans mis s ion mu s t be s imu l taneou s l y s tabl e and vari
abl e. For examp l e, th e trans mis s ion of genetic material from p arent
to ch il d mu s t, with h igh p robabil ity, p as s p arental traits to th e ch il d .
Wh y? With ou t s u ch s tabil ity of inh eritance, natu ral s el ection cou l d
s el ect a p arent with good traits bu t th e ch il d ren of th at p arent wou l d
not be l ikel y to inh erit th at good trait. A t th e s ame time, th ere mu s t
al s o be a ch ance of p as s ing u s ef u l new or d if f erent traits to th e ch il d .
With ou t th e p os s ibil ity of new or d if f erent traits , th ere wou l d be no
v ariabil ity for natu ral s el ection to act u p on.
Th is s ection exp l ores th e mech anis ms of s tabil ity and v ariation.
2. 5. 1 Stability in the Transmission of Genetic Material
I n natu ral ev ol u tion, rep rod u ction inv ol v es cop ying th e p arent's DNA
and trans mitting al l or p art of th at DNA to th e ch il d . We h av e
al read y p ointed to s ome of th e p rincip al mech anis ms of s tabil ity in
h ered ity: /
Q Redundancy
Th e el egant red u nd ancy of th e bas e p air s tru ctu re of DNA .
Q Repair
C omp l ex rep air mech anis ms res id e in th e DNA mol ecu l e for
rep airing d amage to its el f and for th e correction of cop ying
errors . Th is f u nction is s o imp ortant th at s ev eral p ercent of
s ome bacteria's DNA is d ev oted to ins tru ctions for DNA rep air
[Wats on et al ., 1987, p age 339 onward ].
Q Homologous Sexual Recombination
S exu al recombination is of ten regard ed as a s ou rce of genetic
v ariabil ity, and it is . Bu t recombination is al s o a major f actor
in th e genetic s tabil ity of a s p ecies . I t tend s to p rev ent th e
f ixing of negativ e mu tations in th e p op u l ation (th ereby red u cing
v ariabil ity) [Maynard -S mith , 1994]. I n ad d ition, Wats on et al .
argu e th at recombin ation 's most vital fun ction is probably the
repair of damaged DNA [Wats on et al ., 1987, p age 327].
2.5.2 Genetic Variability
Genetic v ariation in a p op u l ation is th e res u l t of th ree p rincip al f orces .
Mutation
E ntrop y-d riv en v ariation, s u ch as mu tation, is th e p rincip al s ou rce of
v ariabil ity in ev ol u tion. Th ere are many typ es of mu tation, incl u d ing
[Wats on et al ., 1987, p ages 340-342]:
Q C h anges from one bas e p air to anoth er. Th es e of ten p rod u ce
neu tral or u s ef u l v ariations . A l th ou gh a bas e p air s witch occu rs
abou t once ev ery ten mil l ion rep l ications or l es s , th ere are h ot
s p ots wh ere bas e p air s witch ing is u p to twenty-f iv e times th e
normal rate.
Q A d d itions or d el etions of one or more bas e p airs . Th is is cal l ed
a f rames h if t mu tation and of ten h as d ras tic cons equ ences on
th e f u nctioning of th e gene.
Q Large DNA s equ ence rearrangements . Th es e may occu r for any
nu mber of reas ons and are al mos t al ways l eth al to th e organis m.
Homologous and Non-Homologous Genetic Transfer
in Bacteria
Th e exch ange of genetic material among bacteria th rou gh mech a
nis ms s u ch as p h ages , p l as mid conju gation, and trans p os ons is al s o a
s ou rce of bacterial genetic v ariabil ity. O f p articu l ar interes t are:
Q Hfr Conjugation
A bacteriu m in th e Hfr s tate actu al l y injects a cop y of p art of
its genetic material into anoth er bacteriu m, wh ere h omol ogou s
recombination occu rs . Th e bacteria need not be of th e s ame
s p ecies .
Q Transposons
A trans p os on is abl e to ins ert entire genes into th e genetic se
qu ence of th e recip ient bacteriu m. Trans p os ons are th ou gh t to
be res p ons ibl e for conv eying th e genes for antibiotic res is tance
among bacteria of d if f erent s p ecies .
Th es e mech anis ms h av e been mos tl y ignored by GP p rogrammers
becau s e of th e GP f ocu s on s exu al rep rod u ction. Th e au th ors bel iev e
th at th is is an area rip e for res earch becau s e th es e are th e meth od s
of genetic exch ange in th e s imp l er ev ol u tionary p attern of as exu al
p rod u ction and may be more ap p rop riate to th e comp l exity l ev el of
a GP ru n.
Homologous Sexual Reproduction
E xch ange of genetic material in s exu al rep rod u ction h ap p ens th rou gh
recombination. Th e DNA f rom both p arents is recombined to pro
d u ce an entirel y new DNA mol ecu l e for th e ch il d . GP cros s ov er mod
el s s exu al recombination in th e s ens e th at th ere are two p arents and
th at p ortions of th e genetic material of each p arent are exch anged
with p ortions of th e oth er. O n th e oth er h and , GP d oes not mod el
th e homologous as p ect of natu ral recombination, as wil l be d is cu s s ed
in d etail bel ow.
2.5.3 Homologous Recombination
Th e concep t of homologous genetic trans f ers is cl earl y an imp ortant
one. Mos t recombination ev ents s eem to be h omol ogou s . Th e reas on
for th at wil l become cl ear in th is s ection. Homol ogy ap p ears th rou gh
ou t p rocaryotic and eu karyotic genetic exch anges and is an imp ortant
el ement in th e s tabil ity/v ariabil ity mix of natu ral ev ol u tion.
Homol ogou s genetic exch ange occu rs d u ring "cros s ov er" in s exu al
recombination. I t al s o occu rs in bacteria d u ring ev ents s u ch as p l as -
mid conju gation. Homol ogy is th e teas on th at genetic exch ange is a
s ou rce of both genetic v ariation an a genetic s tabil ity in a p op u l ation.
We h av e s een th at mu tation cau s es rand om ch anges in DNA -
normal l y qu ite d amaging ch anges . Homol ogou s exch ange is com
p l etel y d if f erent - it encou rages ch anges in DNA of a v ery narrow
and s p ecif ied typ e. A l th ou gh we wil l go into more d etail l ater, in ho
mol ogou s exch ange, genetic material is exch anged in a manner th at
p res erv es th e f u nction of th e al l -imp ortant DNA trans crip tion seg
ments (genes ) and th e l ength of both DNA mol ecu l es . Th e res u l t
of th is h igh l y control l ed exch ange is th at s exu al recombination h as
a s u cces s rate in generating successful v ariations th at is remarkabl e.
Mos t ch il d ren of s exu al recombination are v iabl e.
8
Homol ogou s exch ange wil l not work u nl es s two requ irements are
met:
1. Homol ogou s exch ange can onl y occu r between two id entical
or al mos t id entical DNA s egments . I n h igh er organis ms , th is
means th at h ors es mate with h ors es , not d ogs . Wh y? O ne
h ors e's DNA can be match ed u p cl os el y with anoth er's s o th at
recombination p res erv es gene f u nctional ity. I n a nu ts h el l , th is
p res erv ation of gene f u nctional ity is wh y cl earl y d ef ined s p ecies
ev ol v e for organis ms th at rep rod u ce s exu al l y.
2. Homol ogou s exch ange can occu r onl y if th e two DNA s egments
to be exch anged can be match ed u p s o th at th e s wap p oint
is at f u nctional l y id entical p oints on each s trand . I n f act,
DNA s trand s are abl e to al ign th ems el v es wh ere th eir bas e
p airs are id entical or al mos t id entical bef ore recombination.
[Wats on et al ., 1987] [Maynard -S mith , 1994],
Figu re 2.3 d emons trates th e f irs t p oint - th e DNA s trand s th at
engage in genetic exch ange mu s t be id entical or nearl y id entical . Fig
u re 2.3 s h ows wh at h ap p ens wh en th e DNA s egments are d is s imil ar.
S u p p os e we recombined th e DNA from two s p ecies , a h ors e and a
f inch . S h ort DNA s equ ences f rom each s p ecies are s h own in Figu re
2.3. Bef ore recombination, th e h ors e (s p ecies 1) h as genes th at tran
s cribe for: p rotein A (Pr A ), p ol yp ep tid e B (Pp B), and p rotein C (Pr
C ). Th e f inch (s p ecies 2) h as genes th at trans cribe f or: p ol yp ep tid e
D (Pp D), p ol yp ep tid e E (Pp E ), and an rRNA mol ecu l e of typ e F
(rRNA F). Th e s wap p oint for recombination is s h own in th e f igu re.
A f ter cros s ov er, th e h ors e's f oal wou l d be abl e to make f inch
p ol yp ep tid e E and f inch mRNA F. Bu t it wou l d l ikel y h av e l os t th e
abil ity to make h ors e p ol yp ep tid e B or p rotein C . If p ol yp ep tid e B
or p rotein C are at al l imp ortant to th e h ors e, th is non-h omol ogou s
recombination wou l d l ikel y be a d is as ter for both th e h ors e and th e
f inch and is p robabl y a good reas on for a h ors e not to mate with a
f inch .
I n f act, non-h omol ogou s recombination is noth ing more th an a
mas s iv e mu tation. I t af f ects not ju s t one or two bas e p airs bu t th e
entire s trand of DNA f rom th e cros s ov er p oint on. Th u s , it f al l s into
With th ree excep tions (trans p os ons , integrativ e v iru s es and agro-
bacteriu m tDNA ) th e known f orms of genetic exch ange among ind iv id
u al s inv ol v e homologous exch ange. E v en th es e th ree mech anis ms ap p ear
to inv ol v e h omol ogou s -l ike mech anis ms .
Species 1 DNA Before Non-Homologous Exchange
PrA PPB PrC
PPD PPE rRNA F
Species 2 DNA Before Non-Homologous Exchange
Species 1 DNA After Non-Homologous Exchange
PrA PPE rRNAF
PPD PPB PrC 1
i
Species 2 DNA After Non-Homologous Exchange
th e category of mu tation id entif ied abov e as a s equ ence rearrange
ment, and a mas s iv e one. S u ch mu tations are normal l y f atal .
Figu re 2.4, on th e oth er h and , il l u s trates h ow s tabil ity and genetic
v ariabil ity may be th e res u l t of homologous recombination. Note
th at each DNA s trand in th e f igu re is a little differen t. DNA O ne
h as Variant 1 of th e gene to p rod u ce Pr A and Pp B. DNA Two
h as Variant 2 of th e s ame genes . Th e Variant 1 genes are alleles of
th e Variant 2 genes in th is examp l e. Bef ore th e recombination, th e
two DNA s trand s h av e al igned th ems el v es correctl y al ong s imil ar or
id entical bas e p air s equ ences .
Wh en DNA O ne and DNA Two recombine, th e integrity of th e
gene s tru ctu re is p res erv ed . More imp ortant, each DNA s trand gets
a working v ers ion of a f u nctional gene to make Pr A and Pp B th e
v ers ions are ju s t a l ittl e d if f erent. S o th e ch il d ren of th is recombina
tion will p robabl y be v iabl e. Final l y, th e recombination h as created a
s mal l amou nt of v ariabil ity. Bef ore th e recombination, Variant 1 of Pr
A may nev er been combined with Variant 2 of Pp B. Th is tes ting of
d if f erent combinations is th e es s ence of genetic v ariabil ity introd u ced
by cros s ov er.
9
E v en th e p roces s of trans p os on recombination, a non-h omol ogou s
p roces s in bacteria wh ere entire intact genes are ins erted by th e trans -
9
Th is examp l e is a l ittl e s imp l is tic. Th e s wap in Figu re 2.4 is intergenic
(between genes ). I ntragenic h omologou s recombination al s o occu rs bu t it
h as th e s ame p rop erty of p res erv ing es s ential s tru ctu re.
Individual 1 DMA Before Homologous Exchange
Pr A (variant
1) Pp B (variant
1)
PrC
Pr A (variant 2) Pp B (variant 2) PrC
Individual 2 DNA Before Homologous Exchange
Individual 1 DNA After Homologous Exchange
Pr A (variant 1) Pp B (variant 2) PrC
Pr A (variant 2) Pp B (variant 1) PrC
Individial 2 DNA After Homologous Exchange
p os on into th e DNA of anoth er bacteriu m, is th e excep tion th at
p rov es th e imp ortance of p res erv ing s tru ctu re in recombination. A n
en tire working gene or s et of genes is ins erted into th e bacteriu m.
10
We h av e ad d res s ed h omol ogy h ere becau s e it may be f ou nd in al
mos t al l f orms of genetic exch ange, f rom th e l owes t bacteria to s exu al
rep rod u ction in mankind . Th e u biqu ity of h omol ogou s exch ange and
th e cl ear imp ortance of s tru ctu re p res erv ation rais e trou bl ing qu es
tions f or GP cros s ov er. GP cros s ov er is cl earl y n ot h omol ogou s . We
d is cu s s th e p robl ems th is h as l ed to and s ol u tions in s ome d etail in
C h ap ter 6.
2.6 Species and Sex
O u r treatment of biol ogy wil l end with a brief d is cu s s ion of s p ecies
and s ex.
11
We cl as s if y organis ms th at rep rod u ce as exu al l y in s p ecies . For
examp l e, we ref er to E. coli bacteria and Shigella and th e l ike. Bu t
in many ways , th e concep t of s p ecies is el u s iv e in as exu al organis ms .
We can tel l if two s exu al organis ms are members of th e s ame s p ecies
10
Th is is th e p roces s by wh ich bacteria are bel iev ed to trans f er antibi
otic immu nity among th ems el v es - ev en among d if f erent s p ecies . S ome
trans p os ons carry res is tence to as many as f iv e s trains of antibiotic.
11
For examp l e, we s h al l not d el v e into th e v ery interes ting qu es tion of
d ip l oid y.
by mating th em and s eeing if th ey h av e v iabl e of f s p ring - th at is
th e d ef inition of a s p ecies . O n th e oth er h and , abs ent mating trial s ,
ou r d ef inition of th e E. coli "s p ecies " is bas ed on ap p earance and
f u nction, not on its genetic s tru ctu re. I n f act, th ere is of ten more
genetic v ariation between two d if f erent E. coli bacteria th an th ere
is between eith er of th em and a comp l etel y ''d if f erent" s p ecies of
bacteria. Pop u l ation s tu d ies of E. coli s u gges t th at mos t E. coli
bacteria are l iteral cl ones of s u cces s f u l E. coli v ariants . I n th e Q/3
rep l icas e exp eriments , was th e f as t RNA th e s ame "s p ecies " as th e
initial RNA temp l ate? How wou l d we ev en begin to ans wer th at
qu es tion?
I n as exu al p op u l ations , mu tation is th e p rimary d riv ing f orce of
ev ol u tion. Bu t as we h av e noted abov e, mos t mu tations are d amaging
to th e organis m, or wors e, l eth al . I n s mal l er p op u l ations , a s trong
argu ment may be mad e th at s l igh tl y d el eteriou s mu tations wil l tend
to accu mu l ate, becoming f ixed ov er time, and th at th e p roces s wil l
continu e to wors en ad in fin itum. Th is is ref erred to as "Mu l l er's
rach et" [Mu l l er, 1932] [Haigh , 1978]. I n enormou s bacterial p op u l a
tions th is may be of l ittl e cons equ ence and th is may be wh y s exu al ity
h as nev er ev ol v ed for many s u ch s p ecies . Bu t in h igh er animal s with
mu ch s mal l er p op u l ations , Mu l l er's rach et may be an imp ortant f orce.
By way of contras t, s p eciation cou l d not be more s p ecif ic in pop
u l ations of s exu al l y rep rod u cing organis ms . C an two organis ms mate
and p rod u ce v iabl e of f s p ring? Th at is th e qu es tion. Wh y is a wel l -
d ef ined s p ecies imp ortant for s exu al rep rod u ction? S exu al recombi
nation may be of great v al u e to a s p ecies for two reas ons :
1. S exu al recombination al l ows th e s p ecies to combine nu merou s
f av orabl e mu tations into one ind iv id u al mu ch more rap id l y th an
as exu al rep rod u ction.
2. S exu al recombination p robabl y amel iorates th e effect of Mu l l er's
rach et.
Bu t recal l ou r earl ier d is cu s s ion of h omol ogy. If th e DNA in th e
two p arents d oes not match cl os el y, mos t matings wil l res u l t in d is as
ter, as in Figu re 2.3. Th u s , to get th e benef it of s exu al rep rod u ction,
a s p ecies mu s t maintain a grou p of mating ind iv id u al s th at h av e id en
tical or cl os e to id entical ch romos omal and DNA s tru ctu res . I t wil l
not work any oth er way.
Genetic p rogramming, from th e s tart, h as rel ied p rincip al l y 011
th e cros s ov er between two p arent p rograms (s exu al rep rod u ction) to
cau s e ev ol u tion (s ee C h ap ter 5 and [Koza, 1992d ]). Th e d if f icu l ty of
f ind ing or ev en d ef ining a h omol ogou s s p ecies in GP is d is cu s s ed at
s ome l ength in C h ap ter 6.
Exercises
1. Wh ich mol ecu l es carry and s tore th e genetic inf ormation in na
tu re?
2. Wh ich are th e two main s ou rces of genetic v ariation (th e equ iv
al ent of genetic op erators ) in natu re?
3. How d o bacteria trans f er genetic inf ormation?
4. E xp l ain th e concep t of h omol ogy. Wh at is h omol ogou s recom
bination?
5. Des cribe th e genetic cod e in natu re. How many "l etters " d oes
it u s e? Wh at d o th ey cod e f or?
6. Wh at is a gene? Wh at is an intron?
7. E xp l ain p rotein s ynth es is . O u tl ine th e p ath from gene in DNA
to p rotein.
8. Wh at is a genotyp e and wh at is a p h enotyp e?
9. E xp l ain natu ral s el ection. A re th ere oth er kind s of s el ection?
10. E xp l ain th e concep t of f itnes s .
Further Reading
C . C ol by,
I NTRO DUC TI O N TO E VO LUTI O NA RY BI O LO GY.
h ttp ://wcl -l .bh am.ac.u k/origins /f aqs /f aq-intro-to-biol ogy.h tml
P. C ov eney and R. High f iel d ,
THE A RRO W O F TI ME .
W.H. A l l en, Lond on, 1990.
R. Dawkins ,
THE BLI ND WA TC HMA KE R.
Norton, New York, NY, 1987.
M. E igen,
S TE PS TO WA RD LI FE : A PE RS PE C TI VE O N E VO LUTI O N.
O xf ord Univ ers ity Pres s , O xf ord , 1992.
B. Lewin,
GE NE S V.
O xf ord Univ ers ity Pres s , O xf ord , 1994.
J. Maynard S mith and E . S zath mary,
THE MA JO R TRA NS I TI O NS I N E VO LUTI O N.
W.H. Freeman, O xf ord , 1995.
J. Med ina,
THE C LO C K O F A GE S .
C ambrid ge Univ ers ity Pres s , New York, NY, 1996.
L. O rgel ,
E VO LUTI O N O F THE GE NE TI C A PPA RA TUS .
in JO URNA L O F MO LE C ULA R BI O LO GY, v ol . 38, p p . 381-393, 1968.
J. Wats on, N. H. Hop kins , J. W. Roberts , J. A rgets inger-S teitz,
A . M. Weiner,
MO LE C ULA R BI O LO GY O F THE GE NE .
Benjamin/C u mmings , Menl o Park, C A , 1987.
3 Computer Science and
Mathematical Basics
C ontents
3. 1 The Importance of Randomness
in Evolutionary Learning 58
3.2 Mathematical Basics 60
3.2.1 Combinatorics and the Search Space 60
3.2.2 Random Numbers 61
3.2.3 Probability 63
3.3 Computer Science Background
and Terminology 67
3.3.1 The Turing Machine, Turing Completeness, and
Universal Computation 67
3.3.2 The Halting Problem 69
3.3.3 Complexity 70
3.4 Computer Hardware 72
3.4.1 Von Neumann Machines 72
3.4.2 Evolvable Hardware 75
3.5 Computer Software 76
3.5.1 Machine Language and Assembler Language . . . 76
3.5.2 Higher Languages 77
3.5.3 Data Structures 79
3.5.4 Manual versus Genetic Programming 82
A nyone wh o cons id ers arith metical meth od s of p rod u cing rand om
nu mbers is , of cou rs e, al read y in a s tate of s in.
J. VON NE UMA NN, 1951
I n th is ch ap ter we s h al l introd u ce s ome f u nd amental notions of com
p u ter s cience and math ematics neces s ary for u nd ers tand ing th e GP
ap p roach . Th e l ead ing qu es tion th eref ore is : Wh at are th e math e
matical and inf ormation-p roces s ing contexts of GP, and wh at are th e
tool s f rom th es e contexts th at GP h as to work with ?
3. 1 The Importance of Randomness
in Evolutionary Learning
A s we h av e s een in th e l as t ch ap ter, organic ev ol u tion is one of th e
ef f ectiv e means of "au tomatic" l earning th at we obs erv e in natu re.
GP is bas ed on a cru d e mod el of wh at we u nd ers tand to be th e
mech anis ms of organic ev ol u tionary l earning. Th e p rincip l e d ynamic
el ements of th at mod el are:
Q I nnov ation cau s ed by mu tation, combined with
Q Natu ral s el ection.
Togeth er and by th ems el v es , th es e two d ynamics ap p ear to be
s u f f icient to cau s e organic ev ol u tion to occu r in s el f -rep l icating enti
ties . A s exu al s ingl e cel l rep rod u ction, mu tation, and natu ral s el ection
were th e s ol e mech anis ms of ev ol u tionary l earning for many mil l ions
of years [Wats on et al ., 1987].
I n ad d ition to mu tation and natu ral s el ection, th e mod el on wh ich
GP is bas ed al s o incl u d es s exu al rep rod u ction. S exu al rep rod u c
tion and th e rel ated mech anis m of gene cros s ov er obv iou s l y conf er
s ome ev ol u tionary ad v antage, at l eas t f or organis ms with d ip l oid gene
s tru ctu res - s exu al rep rod u ction h as been a v ery s u cces s f u l s trategy
for h u nd red s of mil l ions of years .
Th es e d if f erent mech anis ms of ev ol u tionary l earning (mu tation
and s exu al recombination) op erate in natu re and in th e comp u ter.
I n natu re, mu tation is bas ical l y f ree. I t is a byp rod u ct of entrop y.
For examp l e, DNA is not al ways rep l icated accu ratel y and UV l igh t
rand oml y f l ip s nu cl eotid e "bits " and s o f orth . I n s h ort, th e tend ency
in natu re toward d is ord er wil l al ways tend to cau s e ch anges in or
d ered entities and in th eir of f s p ring. S o, rand om ch ange comes for
free in organic ev ol u tionary l earning. I n contras t, a l arge amou nt
of th e energy exp end ed in ev ol u tionary l earning is u s ed to cons erv e
th e p h enotyp e d es p ite th e entrop ic tend ency toward d is ord er. Th is
l earned s tabil ity of th e p h enotyp e is an extremel y imp ortant ach iev e
ment of ev ol u tion.
S exu al rep rod u ction is anoth er matter al togeth er. Th e p h ys ical
mech anis ms of biol ogical s exu al rep rod u ction are comp l ex and mu s t
be s el f -maintained agains t th e p u l l of entrop y. Th e mech anis m of
s exu al s el ection al s o imp os es great cos t on th e ind iv id u al and th e
s p ecies . S p ecies ev ol v e "tags " to enabl e members of th e s p ecies to
id entif y oth er members of th e s p ecies . S ome of th os e tags come at
th e exp ens e of certain f itnes s -rel ated as p ects l ike s p eed . Bird cal l s
can id entif y th e l ocation of a bird to p red ators . A mal e p eacock's
tail s lows it d own. S o, s exu al rep rod u ction is d ecid ed l y not "f ree."
I n comp u ter p rograms , on th e oth er h and , s tabil ity is an ingrained
f eatu re, at l eas t for th e time f rames rel ev ant to u s with res p ect to
comp u terized ev ol u tionary l earning. I n s u ch a time f rame, we cannot
cou nt on entrop y cau s ing bits to f l ip . O f cou rs e, if we were wil l ing to
wait for th e actu al p h ys ical mech anis m of th e RA M to d eteriorate, we
migh t ach iev e th is ef f ect. Bu t th is wou l d be f ar too slow with res p ect
to ou r life exp ectancy. S o as a p ractical matter, comp u ter p rograms
will not ch ange in th e time s cal e requ ired u nl es s we exp l icitl y ad d
a d riv ing force for ev ol u tionary l earning.
1
O f cou rs e, th at s ep arate
d riv ing force is s imu l ated mu tation and p erh ap s s imu l ated s exu al
rep rod u ction.
How can we s imu l ate entrop ic ch ange in th e context of a com
p u ter p rogram? A f ter al l , entrop y meas u res th e ef f ects of rand om
p roces s es . GP s imu l ates entrop ic ch ange by u s ing a p s eu d o-rand om
nu mber generator. I ncreas ing ord er and d ecreas ing entrop y (th at
is , cau s ing l earning) by rand oml y ch anging comp u ter p rograms may
l ook cou nter-intu itiv e. Bu t d riv ing a s earch p roces s by a rand omnes s
engine is , in a way, th e mos t general p roced u re th at can be d es igned .
Wh en rand om ch anges are combined with f itnes s -bas ed s el ection, a
comp u terized s ys tem is u s u al l y abl e to ev ol v e s ol u tions f as ter th an
rand om s earch [E igen, 1992] [Koza, 1992d ); s ee C h ap ter 2.
Th e abov e argu ment is ind ep end ent of wh eth er th e s earch s p ace
is s mal l enou gh to al l ow exh au s tiv e s earch or s o l arge th at onl y sam
p l ing can res onabl y cov er it: on av erage, it is better to v is it l ocations
non-d eterminis tical l y. By "non-d eterminis tic," we mean th at th e al
gorith m, af ter v is iting a l ocation, al ways h as a ch oice wh ere to go
"'Note, h owev er, th e interes ting h yp oth es is p u t f orward by Bel ad y and
Leh man [Belad y and Leh man, 1985] th at, in f act, a real bu t u nnoticed
"natu ral s el ection" is acting on comp u ters wh ich res u l ts in co-ad ap tation
of comp onents (e.g., p erip h ery and s ys tem) or of h ard ware and s of tware to
th e effect th at mos t ch anges in th e conf igu ration cau s e s ys tem f ail u re.
next. Non-d eterminis tic al gorith ms are p res entl y being d ev el op ed in
d if f erent areas of comp u ter s cience with cons id erabl e s u cces s .
I n concl u s ion, GP as a general s earch p roces s in th e s p ace of al l
p os s ibl e p rograms /al gorith ms will d ep end h eav il y on rand omnes s in
d if f erent f l av ors . For th is reas on, we s h al l s ee in th e next s ection h ow
rand om nu mbers can be generated with in a comp u ter.
3.2 Mathematical Basics
Th e math ematical bas is for rand omnes s is p robabil ity th eory. I ts ori
gins go back well into th e 17th centu ry. S timu l ated by p robl ems of
gambl ing, Bl ais e Pas cal and Pierre Fermat were th e f irs t to concep
tu al ize p robabil ity. Th e f iel d onl y l ater d ev el op ed into an imp ortant
branch of math ematics wh ere th e l aws of rand om ev ents are s tu d ied .
Becau s e rand om ev ents p l ay s u ch a p rominent rol e in GP, we
s h al l take a cl os er l ook at p robabil ity. Bef ore going into d etail s of
p robabil ity, h owev er, we s h ou l d cons id er d is crete el ements and th eir
combinations .
3. 2. 1 Combinatorics and the Search Space
I n GP, it is of ten neces s ary to es timate th e s ize of th e s earch s p ace
and th e d if f icu l ty of th e p robl em being s ol v ed . Th e s earch s p ace is ,
s imp l y p u t, th e s et of al l p rograms th at cou l d be f ou nd by th e GP
al gorith m, giv en a certain p rogramming l angu age.
* C ombinatorics is a math ematical bas is for cal cu l ating th e s ize of
th e s earch s p ace. C ombinatorics ans wers th e qu es tion: Giv en a s et
of d is crete el ements - f u nction s ymbol s , for ins tance - in h ow many
d if f erent ways can we ord er th em? We are th u s concerned , in th e
s imp l es t cas e, with l inear ord erings of a s et of el ements .
Let u s rep res ent el ements by l owercas e l etters , l is ted in al p h abetic
ord er. For ins tance, cons id er E = {a, b, c}, th e s et of 3 el ements a, 6, c.
Definition 3.1 A permutation is an arbitrary orderin g of the el
emen ts of a set E that uses each elemen t on ce.
N d if f erent el ements cons titu ting th e s et E can be ord ered in Nl
d if f erent p ermu tations .
If we s el ect a s u bs et of K ou t of N el ements from th e s et we
cons id er a combination of ord er K.
Definition 3.2 A combination of order K is an arbitrary selec
tion of K out of N elemen ts from the set E without replacemen t.
3.2 Mathematical Basics
d if f erent combinations if we d o not cons id er rep l acement and ord er
of s el ection. C(K,N) is cal l ed th e binomial coef f icient.
If, h owev er, th e ord er of th os e K el ements is ad d itional l y cons id
ered , th ere is a f actor K! between th e f ormer combinations and wh at
we cal l v ariations .
Definition 3.3 A variation of order K is an ordered selection of
K out of N elemen ts from a set E.
Th ere are
v ariations and
combinations if rep etition of el ements is al l owed .
C ombinatorics is imp ortant f or GP wh en we want to comp u te
th e s ize of a s earch s p ace and , th eref ore, th e d if f icu l ty of a s earch
p robl em. How we can u s e combinatorics to gain inf ormation wil l
be s h own af ter we h av e introd u ced s ome bas ic concep ts of comp u ter
s cience.
3.2.2 Random Numbers
A s mentioned bef ore, rand omnes s is of u tmos t imp ortance in genetic
p rogramming. Th is s ection is d ev oted to a d is cu s s ion of th e es s ential s
of rand om nu mbers and th eir generation th rou gh al gorith ms . We are
interes ted h ere in mech anis ms wh ich l ead to a d is tribu tion of nu mbers
with in a giv en interv al th at l ooks as mu ch as p os s ibl e l ike th e ou tcome
of a rand om p roces s . S ince we s h al l emp l oy d eterminis tic al gorith ms
to generate th os e nu mbers , we are in f act not d eal ing with rand om
nu mbers bu t with qu as i-rand om or p s eu d o-rand om nu mbers . Knu th
[Knu th , 1981] h as s tu d ied in d etail wh at we need to cons id er if we
wis h to generate rand om nu mbers .
Th e f irs t mes s age f rom Knu th is th at a comp l icated and rand om-
l ooking al gorith m d oes not gu arantee th e generation of good se
qu ences of rand om nu mbers . I ns tead , v ery s imp l e al gorith ms p erf orm
s u rp ris ingl y wel l in generating rand om nu mbers . Th e s imp l es t is th e
l inear congru ential meth od with s u itabl y ch os en p arameters .
Th e l inear congru ential meth od of generating a s equ ence of equ al l y
d is tribu ted nu mbers between 0 and 1 goes back to Leh mer
Th ere are
(3.1)
(3.2)
(3.3)
3.3 Computer Science Background
and Terminology
A ll comp u ters are created equ al .
UNKNO WN
Th is s ection p rov id es bas ic comp u ter s cience concep ts and terminol
ogy rel ev ant to genetic p rogramming.
3.3.1 The Turing Machine, Turing Completeness, and
Universal Computation
A l th ou gh th e Turin g machin e (TM) is one of th e bes t known typ es of
comp u ting mach ines , no one h as ev er bu il t one.
2
Th e Tu ring mach ine
is an extremel y s imp l e comp u ter, and th e s u rp ris ing f act is th at a TM
can s imu l ate th e beh av ior of an y comp u ter. S o, any comp u ter th at
can s imu l ate a TM can al s o s imu l ate any oth er comp u ter. Howev er,
th e TM is a v ery inef f icient comp u ter, and it is general l y not u s ef u l
for cal cu l ations . Rath er, th e concep t of a Tu ring mach ine h as been
an inv al u abl e tool for math ematicians anal yzing comp u ters and wh at
th ey can and cannot d o.
Th e TM was introd u ced by th e Britis h math ematician
Tu ring in h is mil es tone 1936 p ap er "O n comp u tabl e nu mbers , with an
ap p l ication to th e E nts ch eid u ngs p robl em" [Tu ring, 1936]. His s imp li
f ied comp u ter cons is ts of onl y f ou r p arts (s ee Figu re 3.2):
J A l ong tap e of p ap er wh ere s ymbol s can be read , written and
ch anged (ov erwritten). Th e tap e is d iv id ed into s qu ares th at
contain exactl y one s ymbol or th at are emp ty.
Q A read /write d ev ice for read ing one s ymbol from th e tap e or
writing/ch anging one s ymbol on th e tap e. Th e d ev ice can mov e,
one s tep at a time, ov er th e tap e to read th e contents of oth er
s qu ares , il l u s trated with th e box in Figu re 3.2.
Q A f inite s et of s tates .
Q A s et of state tran sition rules. Th is s et can be interp reted as th e
"p rogram" of th e Tu ring mach ine th at d ef ines a certain action
th e TM mu s t p erf orm d ep end ing on th e s ymbol it is cu rrentl y
read ing and on wh at s tate it is in. A n action is a s tate ch ange
al ong with eith er a ch ange of th e d ev ice p os ition or a write on
th e tap e.
2
Howev er, a wel l -meaning cl erk at th e Library of C ongres s h as s et as id e
a wh ol e category nu mber for books on "marketing of Tu ring mach ines ."
3 Computer Science and Mathematical Basics
Figure 3.2
Schematic view of a
Turing machine
Turing Completeness
Structure and Function
of a Turing Machine
E ach ru l e s p ecif ies a combination of s tate and tap e s qu are content
and an action to p erf orm if th is combination match es th e cu rrent
s tate and tap e s qu are content. S ome au th ors as s u me th e tap e to be
of inf inite l ength , bu t al l th at is need ed is th at th e tap e can grow to
an arbitrary l ength by ad d ition of new s qu ares to eith er end .
A p rogramming l angu age is s aid to be Turin g complete if it al l ows
to write a p rogram th at emu l ates th e beh av ior of a certain arbitrary
TM. A Tu ring comp l ete l angu age is th e mos t p owerf u l f orm of a pro
gramming l angu age. A ll commercial p rogramming l angu ages , s u ch
as FO RTRA N or C , are Tu ring comp l ete l angu ages . I n f act, onl y a
few s imp l e p rogram cons tru cts are need ed to make a l angu age Tu ring
comp l ete.
O n th e one h and , a too-s imp l e l angu age (s u ch as one containing
ad d ition and no oth er op erator) is n ot Tu ring comp l ete. I t cannot
s imu l ate a Tu ring mach ine and is , th eref ore, u nabl e to rep res ent an
arbitrary al gorith m. O n th e oth er h and , a p rogram l angu age with
ad d ition and a cond itional ju mp op erator is Tu ring comp l ete. Th e
exp res s iv enes s of a l angu age is an imp ortant p rop erty to cons id er
wh en ch oos ing f u nctions for th e f u nction s et of a GP exp eriment. I n
general , it s eems d es irabl e to work with a Tu ring comp l ete l angu age
wh en d oing genetic p rogramming.
Tel l er p rov ed in 1994 [Tel l er, 1994b] [Tel l er, 1994c] th at a GP sys
tem u s ing ind exed memory and arith metic op erators is Tu ring com
p l ete Note th at th e equ iv al ence of d if f erent Tu ring comp l ete l angu ages
onl y h ol d s for f u nctional ity, not for ef f iciency or time comp l exity of
th e word s from th e l angu ages . Langu ages may al s o h av e d if f erent
p rop erties with res p ect to ev ol u tion of al gorith ms in a GP s ys tem.
Formal l y, a Tu ring mach ine T can be d ef ined as
(3.22)
wh ere I is an inp u t al p h abet, O is an ou tp u t al p h abet with I C O,
Q is a f inite s et of al l s tates of T, qo Q is th e initial s tate, F C Q
is th e s et of f inite s tates , and
(3.23)
is a s tate trans ition f u nction. S may be a p artial f u nction, in wh ich
case th ere is at l eas t one (q, a) (Q F) x O not map p ed on any
(r,c) Q x (O U {l,r}). l,r ^ O d enote a mov e of th e read /write
d ev ice - al s o cal l ed th e head - by one tap e s qu are to th e lef t or righ t.
Th ere is a bl ank b O I. E ach tap e s qu are is cons id ered to be
initial ized with b.
Giv en th e s tru ctu re of T, we now cons id er its fun ction . A t th e
ou ts et, th e initial word w I*,w = So..s
n
, is on th e tap e. A l l tap e
s qu ares not u s ed by w contain b. T h as s tate 50 >
a
nd th e h ead is on
o- E ach p roces s ing s tep of T works as f ollows . T h as s tate q\ 0 F.
Th e cu rrent s qu are, th e s qu are th e h ead is on, contains s ymbol GI .
If <5(<7i,aj) is d ef ined and giv es (<?2,02), T makes a trans ition into q%
and p roces s es a^ as f ollows . If 02 O, th en T rep l aces ai by a?.
If a
2
{l,r}, th en th e h ead mov es one s qu are in th e corres p ond ing
d irection. If 8(qi, ai) is not d ef ined , or if q\ F, th en T terminates .
A un iversal Turin g machin e U can emu l ate any Tu ring mach ine
T. To th at end , U is giv en an initial w /* th at d ef ines T and
x, wh ich is T's initial word . I n th is s ens e, U is s aid to be abl e to
p erf orm un iversal computation . O bv iou s l y, in th e cas e of /, th ere is
no need to ch ange U in ord er to p erf orm a d if f erent comp u tation.
Th u s , a u niv ers al Tu ring mach ine is a math ematical mod el for a
mod ern comp u ter. Th e working memory is anal ogou s to a TM's
tap e, a p rogram is anal ogou s to th e emu l ated Tu ring mach ine T, and
th e p rogram's inp u t is anal ogou s to x. Note, h owev er, th at a real
comp u ter may not h av e enou gh memory for s ome p rograms , wh il e a
Tu ring mach ine al ways h as enou gh tap e s qu ares .
3.3.2 The Halting Problem
Th e motiv ation for Tu ring's work with res p ect to th e TM was not
so mu ch to f ind a u niv ers al comp u ting mach ine th at cou l d be s h own
to be as p owerf u l as any oth er mach ine. I ns tead , h e wanted to clar
ify wh eth er s u ch mach ines h ad l imitations and wh eth er th ere were
p robl ems comp u ters cou l d not s ol v e. Tu ring's objectiv e in h is fa
mou s p ap er mentioned abov e was to s h ow th at th ere are f u nctions
th at cannot be comp u ted by a Tu ring mach ine.
A n imp ortant examp l e of a p robl em th at cannot be s ol v ed by
a TM is th e h al ting p robl em. I t as ks if th ere is a p rogram th at
can d etermine wh eth er anoth er p rogram h al ts or not. O ne res u l t of
Universal Turing
Machine and Universal
Computation
Tu ring's work is th at th ere is no p rogram th at can d etermine th e
termination p rop erties of all p rograms . Th ere are many p rograms
wh os e h al ting p rop erty can be d ecid ed with a mech anized p roced u re,
bu t th e h al ting p robl em is u ns ol v abl e in th e general cas e.
Th e h al ting th eorem al s o h as imp ortant imp l ications for th e evo
l u tion of p rograms with a GP s ys tem. If we are ev ol v ing p rograms
with a terminal s et and f u nction s et th at make th e u nd erl ying pro
gramming l angu age Tu ring comp l ete, th en we cannot know before
h and wh ich p rograms wil l terminate and wh ich wil l not. For a GP
ru n, we mu s t th eref ore u s e one of th e meth od s av ail abl e for ensu r
ing time bou nd ed execu tion of an ev ol v ed p rogram. Time bou nd ed
execu tion is f u rth er d es cribed in S ection 10.2.8.
3.3.3 Complexity
Th e s ize of a comp u ter p rogram in GP is of ten ref erred to as th e
p rogram's comp l exity.
3
Th ere are v ariou s meas u res of comp l exity or
s ize in th e GP l iteratu re. O ne of th e mos t natu ral and commonl y u s ed
is s imp l y th e nu mber of nod es in a tree-bas ed genetic p rogramming
s ys tem. O th er d ef initions of comp l exity th at h av e been u s ed are th e
nu mber of bits need ed to exp res s a p rogram in l inear f orm, or th e
nu mber of ins tru ctions , for examp l e, in mach ine cod e; s ee Figu re 3.3.
Th e comp l exity of a comp u ter p rogram is argu abl y rel ated to th e
cap abil ity of th e p rogram to general ize f rom a s et of giv en d ata. A
s h orter p rogram is more l ikel y to s h ow a f eas ibl e beh av ior with d ata
it h as not been exp l icitl y trained on th an a l onger p rogram wou l d .
C h ap ter 8 wil l d is cu s s th e general ization is s u e for p rograms in more
d ep th .
Kolmogorov Complexity and Generalization
I t h as been argu ed th at a s h ort p rogram with low comp l exity h as a
h igh er p robabil ity of general izing wel l . I n general , th e math emati
cal p rop erty "comp l exity of a comp u tabl e object" can be s aid to be
th e s h ortes t p rogram th at p rod u ces th e object u p on execu tion. Note
th at th is comp l exity concep t d if f ers from th e comp l exity d ef inition
d is cu s s ed abov e for p rograms . Th e comp l exity of a ch u nk of infor
mation is a p rop erty of th is inf ormation regard l es s of th e typ e of
inf ormation, and it is ap p l icabl e to many oth er kind s of objects th an
comp u ter p rograms . We cal l th is comp l exity p rop erty of an object
th e Kolmogorov complexity of th e object. S ynonyms for Kol mogorov
comp l exity are algorithmic in formation , algorithmic complexity, or
Kolmogorov-Chaitin complexity.
3
Very of ten, a l ogarith mic f u nction of th e s ize is u s ed .
Figure 3.3
Different complexity
measures: number of
nodes, instructions, or
bits
I n GP, we are interes ted in s el ecting a p rogram - wh ich can be
v iewed as a mod el or h yp oth es is - th at f its th e d ata we h av e ob
s erv ed . For ins tance, we migh t want to p red ict th e next nu mber in
a d ata s eries giv en th e p res entl y known d ata p oints . O r, in s ymbol ic
regres s ion, we migh t l ike to f it a f u nction to a s et of f itnes s cas es s u ch
th at th e f u nction - with h igh p robabil ity - accu ratel y mod el s th e
u nd erl ying p robl em ou ts id e of th e d omain of th e giv en f itnes s cas es .
I t can be s h own th at th e p robabil ity of gu es s ing a p rogram th at
correctl y mod el s s ome f itnes s cas es or oth er obs erv ed d ata is d omi
nated by th e p robabil ities of th e s h ortes t p rograms cons is tent with
th es e d ata. I n oth er word s , if two p rograms mod el th e s ame d ata, th e
s h orter one can be argu ed to h av e a h igh er p robabil ity of being gen
eral with res p ect to th e u nd erl ying p robl em. Howev er, th is s u bject
is s til l in d ebate in th e s cientif ic commu nity [Li and Vitanyi, 1997].
A n interes ting qu es tion is th e rel ation between th e comp l exity
of a p rogram and th at of its env ironment. I n natu re, th e comp lex
ity of p h enotyp es s eems to d raw h eav il y on th e comp l exity of th e
env ironment. Th e genome, in oth er word s , s eems to "h arnes s " th e
comp l exity of th e env ironment to generate an organis m. C an a simi
lar p roces s h el p to p rod u ce comp l ex p rograms in GP?
Figure 3.4
Schematic view of a
computer's RAM memory
3.4 Computer Hardware
3.4.1 Von Neumann Machines
A v on Neu mann mach ine is a comp u ter wh ere th e p rogram res id es
in th e s ame s torage as th e d ata u s ed by th at p rogram. Th is ma
ch ine is named af ter th e f amou s Hu ngarian-A merican math ematician
v on Neu mann, and al mos t al l comp u ters tod ay are of th e v on Neu
mann typ e.
Th e grou p of wh ich v on Neu mann was a member at th e time
of th is inv ention
4
was p ond ering ways to f acil itate p rogramming of
comp u ters . Th ey cons id ered it too ted iou s to reconnect banks of
cabl es and to res et myriad s of s witch es to rep rogram a comp u ting
d ev ice. By contras t, inp u t of d ata v ia p u nch ed card s or p ap er tap es
was mu ch eas ier. S o th e id ea was born of s imp l y inp u tting and s toring
p rograms in th e s ame way as d ata.
Th e f act th at a p rogram can be regard ed as ju s t anoth er kind of
d ata makes it p os s ibl e to bu il d p rograms th at manip u l ate p rograms
and - in p articu l ar - p rograms th at manip u l ate th ems el v es . Th e
memory in a mach ine of th is typ e can be v iewed as an ind exed array
of integer nu mbers , and th u s a p rogram is al s o an array of integers
as d ep icted in Figu re 3.4.
Th is ap p roach h as been cons id ered d angerou s in th e h is tory of
comp u ting. A contemp orary book on comp u ter h ard ware exp l ains :
Th e d ecis ion of v on Neu mann and h is col l aborators to rep res ent
p rograms and d ata th e s ame way, i.e. interch angeabl e, was of
cap tiv ating original ity. Now a p rogram was allowed to mod if y
its elf , wh ich cau s ed s p ecu l ations abou t l earning, s el f -rep rod u cing
and , th eref ore, "l iv ing" s ys tems . A l th ou gh th es e id eas were en
ticing and s til l are, th eir cons equ ences are d angerou s . Not onl y .
are p rograms th at mod if y th ems el v es u nf ath omabl e (incomp re
h ens ibl e), bu t th ey al s o l ead to an u np red ictabl e beh av ior of th e
comp u ter. Fortu natel y, at l eas t wh en th e ou tp u t is being p rinted ,
th is regu l arl y end s in a ch aos of conf u s ing col u mns of nu mbers
and erroneou s d ata wh ich can be th rown away immed iatel y. Th is
4
Th e E NI A C p roject at Moore S ch ool , with J.P. E ckert, J.W. Mau ch l y,
and H.H. Gol d s tine.
ch aos is , of cou rs e, not accep tabl e in l arge and s ens itiv e tech nical
s ys tems . A l read y wh en p rogramming th es e s ys tems , manif ol d se
cu rity meas u res h av e to be taken s u ch th at th e s ys tem d oes not
become au tonomou s .
H. LI E BI G AND T. FLI K, 1993, trans l ated from German
I t is not u nreas onabl e to h op e th at genetic p rogramming wil l
ch ange th is attitu d e comp l etel y.
Dif f erent mach ines u s e integers of d if f erent maximal s izes . C ur
rentl y, 32-bit p roces s ors are th e mos t common typ e of p roces s or avail
abl e commercial l y. Th e memory of s u ch a mach ine can be v iewed as
an array of integers , each with a maximal s ize of 2
32
1, wh ich is
equ al to 4294967295, and a p rogram in s u ch a mach ine is noth ing
more th an an array of nu mbers between zero and 4 294 967 295. A
p rogram th at manip u l ates anoth er p rogram's binary ins tru ctions is
ju s t a p rogram th at manip u l ates an array of integers . Th is is an im
p ortant f act for manip u l ating binary mach ine cod e in GP and wil l
be taken u p again in C h ap ter 9 and in more d etail in C h ap ter 11.
Figu re 3.5 il l u s trates th e p rincip l e of a v on Neu mann mach ine and
als o h ow it can be u s ed for meta-manip u l ation.
The Processor
Th e p roces s or is th e bl ack box d oing al l th e "intel l igent" work in
a comp u ter. Th e p rincip l es of d if f erent p res ent-d ay p roces s ors are
s u rp ris ingl y s imil ar. To s imp l if y s omewh at we can s ay th at th e pro
cessor cons is ts of th ree p arts . Firs t, it h as a d ev ice for s toring and
retriev ing integers from th e memory array. Th en it h as a nu mber of
regis ters for internal s torage of integers and a u nit for arith metic and
logic op eration between th e regis ters , th e A LU, as s h own in Figu res
3.5 and 3.6.
Figure 3.5
The CPU and what it
does
A regis ter is a p l ace ins id e th e p roces s or wh ere an integer can be
s tored . Normal l y, a regis ter can s tore an integer with th e s ame s ize
as th e word s ize of th e p roces s or. For ins tance, a 32-bit p roces s or h as
regis ters th at can s tore integers between 0 and 4294967295. Th e
mos t imp ortant regis ter is th e p rogram cou nter (PC ) wh ich giv es th e
ind ex to th e next ins tru ction to be execu ted by th e p roces s or. Th e
p roces s or l ooks at th e contents of th e memory array at th e p os ition
of th e p rogram cou nter and interp rets th is integer as an ins tru ction,
wh ich migh t be to ad d th e contents of two regis ters or to p l ace a
v al u e from memory into a regis ter. A n ad d ition of a nu mber to th e
p rogram cou nter its el f cau s es trans f er of control to anoth er p art of
th e memory, in oth er word s , a ju mp to anoth er p art of th e p rogram.
A f ter each ins tru ction th e p rogram cou nter is incremented by one
and anoth er ins tru ction is read from memory and execu ted .
Th e A LU in th e p roces s or p erf orms arith metic and l ogic ins tru c
tions between regis ters . A l l p roces s ors can d o ad d ition, s u btraction,
l ogical an d, l ogical or, etc. More ad v anced p roces s ors d o mu l tip l ica
tion and d iv is ion of integers and s ome h av e a f l oating p oint u nit with
corres p ond ing f l oating p oint regis ters .
I n Figu re 3.5 we can s ee th e ov eral l activ ity of th e p roces s or
working on memory cel l s . I ntegers in memory become ins tru ctions to
th e p roces s or wh en th e C PU read s and interp rets th em as command s .
Figu re 3.6 s h ows more d etail s . Th e memory retriev al d ev ice u s es a
regis ter or s ome arith metic combination of regis ters to get an ind ex
nu mber. Th e contents of th e memory array el ement with th is ind ex
nu mber are th en p l aced in one of th e regis ters of th e p roces s or.
Figure 3.6
Schematic view of the
central processing unit
(CPU)
A ll th e beh av ior we s ee in tod ay's comp u ters is bas ed on th es e
s imp l e p rincip l es . C omp u ters d oing grap h ics or animations , control
ling a was h ing mach ine, or monitoring a car's ignition s ys tem al l d o
th e s ame memory manip u l ations and regis ter op erations .
RISC/CISC
A t p res ent, both C I S C p roces s ors (Pentiu m) and RI S C p roces s ors
(S PA RC or PowerPC ) are u s ed in commercial comp u ters . C I S C is
an acronym for C omp l ex I ns tru ction S et wh il e RI S C is an acronym
for Red u ced I ns tru ction S et. A s ind icated by th e acronym, RI S C
p roces s ors h av e fewer and l es s comp l ex ins tru ctions th an C I S C pro
ces s ors . Th is means th at a RI S C p roces s or can be imp l emented with
les s comp l ex h ard ware and th at it wil l execu te its ins tru ctions f as ter.
Th e RI S C ap p roach f ollows s ome ad v ice on ins tru ction s et d es ign
giv en by v on Neu mann:
Th e real l y d ecis iv e cons id eration in s el ecting an ins tru ction s et is
s imp l icity of th e equ ip ment d emand ed by th e [ins tru ction s et] and
th e cl arity of its ap p l ication to th e actu al imp ortant p robl ems ,
togeth er with [its] s p eed in h and l ing th os e p robl ems .
J. VO N NE UMA NN, 1944
O ne of th e central id eas of RI S C arch itectu res is th e extens iv e u s e
of regis ters in th e cod e. Th e l ate S eymou r C ray, one of th e p ioneers
of h igh p erf ormance comp u ting, mad e th e f ol l owing remark:
[Regis ters ] mad e th e ins tru ctions v ery s imp l e.... Th at is s omewh at
u niqu e. Mos t mach ines h av e rath er el aborate ins tru ction s ets in
v ol v ing many more memory ref erences th an th e mach ines I h av e
d es igned . S imp l icity, I gu es s , is a way of s aying it. I am al l for
s imp l icity. If it's v ery comp l icated , I can't u nd ers tand it.
S . C RA Y, 1975
3.4.2 Evolvable Hardware
Recentl y, interes t h as grown rap id l y in a res earch f iel d th at h as evo
l u tion of el ectronic h ard ware as its top ic. With th e ad v ent of in
creas ingl y ch eap er f reel y p rogrammabl e gate array ch ip s (FPGA s ), a
wh ole new area for ev ol u tionary al gorith ms is op ening u p .
For th e f irs t time it s eems f eas ibl e to actu al l y d o trial s in h ard
ware, al ways with th e p os s ibil ity in mind th at th es e trial s h av e to
be d is card ed d u e to th eir f ail u re. E v ol v abl e h ard ware (E HW) is one
imp ortant s tep , becau s e with it, th ere is no need to d is card th e entire
h ard ware; ins tead one s imp l y rep rograms th e ch ip . Th e E HW f iel d is
d ev el op ing qu ickl y, and th e interes ted read er s h ou l d cons u l t original
l iteratu re [DeGaris , 1993] [Hirs t, 1996].
3.5 Computer Software
O f al l th e el ements th at make u p th e tech nol ogy of comp u ting,
none h as been more p robl ematic or u np red ictabl e th an s of tware.
... Th e f u nd amental d if f icu lty in writing s of tware was th at, u ntil
comp u ters arriv ed , h u man beings h ad nev er bef ore h ad to p rep are
d etail ed ins tru ctions for an au tomaton - a mach ine th at obeyed
u nerringl y th e command s giv en to it, and for wh ich ev ery p os s ibl e
ou tcome h ad to be anticip ated by th e p rogrammer.
M. C A MPBE LL-KE LLY AND W. A S PRA Y, 1996
With th e excep tion of E HW, h ard ware is too rigid to rep res ent ch ang
ing need s for comp u ter f u nctional ity. Us e of s of tware is th e onl y way
to h arv es t th e u niv ers al ity of comp u ters . I n th is s ection we d is cu s s
th e mos t bas ic as p ects of s of tware.
Firs t, we take a l ook at th e mos t el ementary rep res entation of
s of tware: mach ine l angu age, th e "nativ e l angu age" of a p roces s or,
wh ich it s p eaks f as t. A l s o, we s h al l introd u ce as s embl y l angu age.
S econd , we s h al l l ook at cl as s es of h igh er l angu ages . Th ey are eas ier
to u s e for h u mans , bu t th ey h av e to be trans l ated into a mach ine
l angu age p rogram. Th ird , el ementary d ata s tru ctu res - s tru ctu res
th at al l ow th e s toring, read ing, and writing of d ata in certain l ogical
ways - wil l be p res ented . Fou rth , we s h al l air s ome th ou gh ts on
manu al v ers u s genetic p rogramming.
3. 5. 1 Machine Language and Assembler Language
A p rogram in mach ine l angu age is a s equ ence of integers . Th es e
integers are of ten exp res s ed in d if f erent bas es - d ecimal , octal , hex
ad ecimal , or binary - in ord er to s imp l if y p rogramming and read ing
mach ine l angu age p rograms . By binary mach ine cod e, we mean th e
actu al nu mbers s tored in binary f ormat in th e comp u ter.
Howev er, it is of ten imp ractical to u s e nu mbers for ins tru ctions
wh en p rogramming in or d is cu s s ing mach ine l angu age. Remember
ing, for ins tance, th at th e ad d ition ins tru ction is rep res ented by
2 416 058 368 in th e S UN S PA RC arch itectu re is not natu ral to th e hu
man mind (wh at was th at nu mber again?). If we rep res ent th e s ame
ins tru ction in h exad ecimal bas e (90022000), it wil l be more comp act
and eas ier to reas on abou t, bu t it is s til l not natu ral to remember. For
th at p u rp os e, as s embl y l angu age was d ev el op ed . A s s embl y l angu age
u s es mnemonics to rep res ent mach ine cod e ins tru ctions . A d d ition is
rep res ented by th e th ree l etters A DD. Th e grammar for as s embl y lan
gu age is v ery s imp l e, and th e trans l ation from as s embl y l angu age to
mach ine cod e is s imp l e and s traigh tf orward . Bu t as s embl y l angu age
is not mach ine l angu age, and cannot be execu ted by th e p roces s or
d irectl y with ou t th e trans l ation s tep .
I t is worth noting th at d if f erent p roces s ors imp l ement d if f erent
word s izes , ins tru ctions , and cod ing of th e ins tru ctions , bu t th e dif
ferences between ins tru ctions for p roces s ors of d if f erent f amil ies are
s u rp ris ingl y s mal l .
3.5.2 Higher Languages
Both mach ine l angu age and as s embl er are cal l ed l ow-l ev el l angu age
becau s e h ard ware as p ects are imp ortant wh en writing a p rogram.
Low-level l angu ages are mach ine-oriented l angu ages . I n contras t,
h igh -lev el l angu ages or p robl em-oriented l angu ages d o not requ ire de
tail ed knowl ed ge abou t th e u nd erl ying h ard ware. A p robl em-oriented
l angu age, l ike FO RTRA N [Morgan and S ch onf el d er, 1993], al l ows for
mod eling by u s e of abs tract rep res entations of op erators and op erand s .
We can f u rth er d is tingu is h between general -p u rp os e and s p ecial -
p u rp os e h igh -l ev el l angu ages . Th e f ormer p rov id e p robl em-ind ep en
d ent l angu age el ements , wh il e th e l atter s u p p l y el ements th at are tai
lored for mod el ing s itu ations f rom a certain p robl em d omain. For in
s tance, Pas cal [S ed gewick, 1992] is a general -p u rp os e l angu age, wh il e
SQL [C elko, 1995] is a s p ecial -p u rp os e l angu age u s ed in th e d atabas e-
qu ery d omain. A l l general -p u rp os e l angu ages are Tu ring comp l ete,
of cou rs e.
High -l ev el l angu ages can be cl as s if ied by th e d if f ering s ets of p rin
cip les th ey obey. We mention a few p rominent l angu age cl as s es in
th e ch ronol ogical ord er of th eir d ev el op ment. Tabl e 3.1 s u mmarizes
th e s itu ation.
General and Special
Purpose
C l as s
imp erativ e
f u nctional
p red icativ e
object-oriented
E ntity
v ariabl e
f u nction
p red icate inf erence ru l e
ins tance, cl as s , s tate, meth od
Princip l e |
v on Neu mann arch itectu re
l ambd a cal cu l u s
l ogic
object-oriented real ity
A d a [Barnes , 1982], BA S I C , C [Kernigh an et al ., 1988], FO R
TRA N, Pas cal , or S I MULA [Kirkeru d , 1989] are examp l es of imp era
tiv e l angu ages . Program s tatements exp l icitl y ord er (Latin impemre)
th e comp u ter how to p erf orm a certain tas k. S ince imp erativ e lan
gu ages are th e ol d es t h igh -l ev el l angu ages , th ey are cl os es t to l ow-l ev el
l angu ages .
Table 3.1
Language classes
Imperative Languages
Functional, Applicative
Languages
Predicative Languages
Object-Oriented
Languages
Princip l es u nd erl ying th e v on Neu mann comp u ter arch itectu re
inf l u enced th e d es ign of imp erativ e l angu ages . For ins tance, an es
s ential entity of any imp erativ e l angu age is a variable, and typ ical
s tatements s emantical l y l ook l ike:
p u t v al u e 42 i nt o v ari abl e u niv ers al A ns wer
Th e exis tence of v ariabl es res u l ts f rom th e v on Neu mann p rincip l e
of d iv id ing memory into equ al -s ized cel l s , one or more of wh ich may
rep res ent a v ariabl e.
LI S P, LO GO , ML, and BE TA are examp l es of f u nctional or ap
p l icativ e l angu ages . Program s tatements d ef ine a certain tas k. I n
math ematics , a f u nction is a rel ation between a s et A and a s et B
s u ch th at each el ement in A is as s ociated with exactl y one el ement
in B. I n oth er word s , a f u nction map s A onto B.
A p rogram rep res ents a f u nction th at map s inp u t d ata and in
ternal d ata into ou tp u t d ata. Th is is th e main p oint of a f u nctional
l angu age. I ts es s ential entity is cal l ed a fun ction . Us ing a f u nction
on its argu ments is cal l ed application , s o a f u nctional l angu age is al s o
cal l ed applicative. Fu nctions can be combined into comp os ed func
tions . A v al u e can be a f u nction, too. Th e l ambd a cal cu l u s is th e
math ematical f ou nd ation of f u nctional l angu ages .
Like a f u nctional l angu age, a p red icativ e l angu age is bas ed on
math ematical p rincip l es . PRO LO G is s u ch a l angu age. Program
ming means d es cribing to th e comp u ter what is wanted as res u l t. I t
d oes not mean s aying how to get to th e res u l t. A n examp l e f rom
[S tans if er, 1995] s h ou l d il l u s trate th is .
mortal (X) : - man (X) /* if X i s a man th en X i s mortal */
man ( s ocr at es ) . /* S ocrates i s a man. */
mortal (s ocrat es )? /* qu es tion t o s ys tem */
yes / * s ys tem ans wer */
Th e bas ic id ea of p red icativ e l angu ages is to rep res ent a p rogram
by v al id s tatements (p red icates ) and inf erence ru l es . Th e ru l es de
s cribe h ow to d ed u ce p red icates f rom p red icates . Getting a certain
res u l t r from a p red icativ e p rogram imp l ies as king a qu es tion l ike:
"for wh ich v al u e(s ) of r is a certain p red icate tru e?"
S MA LLTA LK-80, C ++, and JA VA are examp l es of object-orien
ted p rogramming l angu ages . Th e p rincip l e beh ind th es e l angu ages
is mod el ing a s ys tem by objects . A n object rep res ents a certain
p h enomenon. I t may h av e s tates . O bjects may commu nicate by
s end ing mes s ages to each oth er. A n object receiv ing a mes s age may
react to th is ev ent by execu ting a meth od . A s a res u l t of a meth od
execu tion, th e receiv ing object may, for examp l e, s end an object to
th e oth er object.
E ach object is an ins tance of a cl as s th at d ef ines s tates and meth
od s of each of its ins tances . A s u bcl as s of a cl as s d ef ines its ins tances
as s p ecial cas es of th e corres p ond ing s u p ercl as s . I ns tances of a sub
clas s inh erit al l meth od s and s tates of al l corres p ond ing s u p ercl as s es .
Tabl e 3.2 s h ows s ome ins tances of h igh -l ev el l angu ages and h ow
th ey h av e been u s ed in connection with genetic p rogramming.
Langu age
C
C ++
FO RTRA N
LI S P
PRO LO G
I nd iv id u al
I mp l ementation
S ou rce |
[Keller and Banzh af , 1996]
[Keith and Martin, 1994]
[Banzh af , 1994]
[Koza, 1992d ]
[O s born et al ., 1995]
3.5.3 Data Structures
A ny s tu p id boy can cru s h a bu g. Howev er, al l th e p rof es s ors in
th e worl d cannot make one.
UNKNO WN
Table 3.2
GP systems that allow for
evolving high-level
language individuals
and/or are implemented
in a high-level language
Maybe artif ical ev ol u tion wil l be abl e to come u p with a s tru ctu re
as comp l ex as a h emip terou s ins ect s ome d ay. C u rrentl y, GP is al
read y ch al l enged wh en trying to manip u l ate comp arativ el y p rimitiv e
data structures in a meaningf u l way. Th is s ection d is cu s s es s ome
p rominent d ata s tru ctu res offered by many common p rogramming
l angu ages .
A d ata s tru ctu re is eith er a v al u e range or a s tru ctu re of d ata
s tru ctu res and a s et of cons tru ctors . I n th e f ormer cas e, th e d ata
s tru ctu re is cal l ed simple; in th e l atter cas e, composed. A cons tru ctor
cons tru cts a comp os ed d ata s tru ctu re from oth er d ata s tru ctu res .
From th e p oint of v iew of th e v on Neu mann arch itectu re, p rogram
cod e and d ata are binary s equ ences . Th e p rimitiv e organization of
eigh t bits giv ing a byte and of a mach ine-d ep end ent byte nu mber
giv ing a memory word are th e onl y f orms of s tru ctu re in th is se
qu ence. Mos t real -worl d s itu ations , h owev er, are p h enomena with
comp l ex s tru ctu re. Data s tru ctu res for u s e in mod el ing th es e situ
ations s h ou l d be p robl em oriented . Ju s t as math ematical concep ts
u nd erl ie h igh -l ev el l angu ages , d ata s tru ctu res in p articu l ar are d rawn
from math ematical s tru ctu res and op erators . Figu re 3.7 sh ows a hi
erarch y of d ata s tru ctu res . A n arrow ru nning from a s tru ctu re A to
a s tru ctu re B means th at B is a s p ecial cas e of A .
Figure 3.7
Data structure hierarchy.
An arrow running from a
structure A to a
structure B means that
B is a special case of A.
Typ ical s imp l e concrete s tru ctu res are integer, real , Bool ean,
ch aracter, enu merated , and s u branges of th es e. Th e kind s of v al u es
contained in integer, real , and ch aracter are obv iou s . Bool ean
contains ju s t two v al u es : tru e and f al s e. Tru e d enotes th at a certain
cond ition is giv en, f al s e th e op p os ite. E nu merated is a s imp l e ab
s tract s tru ctu re. I t contains a f inite l inear-ord ered s et of v al u es . For
ins tance, red , yel l ow, green with ord er red > yel l ow > green is
an enu merated s tru ctu re col or. A s u brange is a contigu ou s interv al
of a v al u e range. For ins tance, red , yel l ow is a s u brange of col or.
Th ere are many p otential cons tru ctors and comp os ed s tru ctu res .
Fiv e p rominent cons tru ctor clas s es and th e corres p ond ing s tru ctu re
cl as s es are d is cu s s ed next. Many h igh -l ev el l angu ages offer ins tances
of th es e cl as s es as l angu age el ements .
A ggregation bu il d s a C artes ian p rod u ct of s tru ctu res , cal l ed a
record . For ins tance, (1, 3.14) is an el ement in th e record IN x H. If al l
s tru ctu res of a record are id entical , th e record is cal l ed an array. For
ins tance, (2.718, 3.141,1.414) is an el ement in th e array R x I I x B,.
A p ers on p rof il e l ike
f i r s t name: S mith
s u rname: Joh n
age (yrs ) : 32
h eigh t (meters ): 1.95
weigh t (kg) : 92
is an el ement f rom a record NxNxA xHxW. N is an array of
twenty ch aracters , A is a s u brange from 0 to 150 of integer, H is a
s u brange from 0.3 to 2.72 of real ,
5
W is a s u brange f rom 0 to 300.
General ization u nites s tru ctu res . (2.718,3.141,1.414) and 10, for
ins tance, are el ements in th e u nited s tru ctu re 1R x ]R x H U IN. Re
cu rs ion cons tru cts a s tru ctu re cons is ting of an inf inite d is crete v al u e
range. Recu rs iv e s tru ctu res can be cons tru cted in s ev eral h igh -l ev el
l angu ages , l ike LI S P or C .
A s tru ctu re can be mod el ed by a s tru ctu re cal l ed a graph. A grap h
is a s et of nod es and a s et of ed ges th at connect certain nod es with
each oth er. A nod e rep res ents a p art of an ins tance of th e s tru ctu re.
For examp l e, cons id er th e record R := IN x R, or R := N. Th is
is a - p otential l y inf inite - recu rs iv e s tru ctu re IN x IN x IN x .... A n
ins tance of th is s tru ctu re is (1,836,947,37, 7959739793457,...). S u ch
a l inear recu rs iv e s tru ctu re can be mod el ed as a l is t. A l is t is a s p ecial
cas e of a grap h : it is cycl e-f ree and each nod e is connected , at mos t,
to two d if f erent oth er nod es . I n th e examp l e, each integer v al u e can
be rep res ented by a nod e.
For anoth er ins tance, cons id er th e exp res s ion a + b * c. Let u s
rep res ent each s ymbol in th is exp res s ion by a s p ecif ic nod e. Now,
connect th e PLUS nod e with th e a-nod e and th e MULT nod e. Th en,
connect th e MULT nod e with th e 6-nod e and th e c-nod e. Final l y,
exp l icitl y mark exactl y one nod e as a s p ecial nod e. Wh at you get
is a tree, wh ich is a v ery imp ortant s p ecial cas e of a grap h : it is
cycl e-f ree, and one of its nod es is exp l icitl y marked as th e root nod e.
Th u s , a tree is a hierarchical grap h : al l nod es connected to th e
root nod e are cal l ed th e children of th e root nod e. O f cou rs e, th es e
ch il d ren can be s een as root nod es of th eir own ch il d ren, and s o on.
O bv iou s l y, a tree may be comp os ed of s u btrees . Th at is , a tree is a
recu rs iv e s tru ctu re. I n p articu l ar, a l is t is a s p ecial cas e of a tree.
5
Memorial izing Robert P. Wad l ow 1918-1940, wh os e attes ted h eigh t
d ef ines th e u p p er range l imit.
Aggregation
Generalization,
Recursion
Graph, Tree, List
I n th e examp l e of th e arith metic exp res s ion, th e PLUS nod e may
be th e root nod e. Th en, th e s u btrees a and b*c mod el s u bexp res s ions .
I n general , grap h s can be u s ed as mod el s of s tru ctu res and p ro
ces s es from real -worl d ap p l ications . For ins tance, certain comp l ex
ind u s trial p roces s es may be mod el ed as Petri nets , wh ich are power
ful ins tances of general grap h s . A tree can mod el a d ecis ion p roces s :
each nod e rep res ents an op tion s et, and d ep end ing on th e ch os en op
tion, th e p roces s branch es to a ch il d nod e. A l is t may mod el a s tack
of engine p arts th at are s u cces s iv el y being p op p ed f rom th e s tack by
an engine-bu il d ing robot.
A p ower s et of a s et 5 is th e s et of al l s u bs ets of S. Th e
p ower s et cons tru ctor giv es th e p ower s et of a s tru ctu re as a new
s tru ctu re. For ins tance, th e p ower s et of {red , yel l ow, green}
is {0}, {red }, {yel l ow}, {green}, {red , yel l ow}, {red , green},
{yel l ow, green}, {red , yel l ow, green}. A p ower s et can h el p
in mod el ing an arch etyp e th at imp l ies combinations of entities . For
ins tance, cons id er a s et of ch es s p l ayers . I n ord er to comp u te al l pos
s ibl e p l ayer combinations , one s imp l y cons tru cts th e p ower s et and
is ol ates al l s u bs ets of s ize 2.
A f u nction s p ace is a s et of math ematical f u nctions . Th e f u nction
s et cons tru ctor giv es a corres p ond ing s tru ctu re. For ins tance, th e s et
of al l continu ou s f u nctions is a f u nction s p ace.
A s el ector s el ects a v al u e of a comp onent of a comp os ed s tru ctu re.
For ins tance, th e s el ector [i] s el ects comp onent i in an array and
ans wers z's v al u e.
Data s tru ctu res are an es s ential top ic in comp u ter s cience, and
it remains to be s een h ow GP can make u s e of th em. S ome s tu d ies
al read y ind icate th at a connection can be mad e (s ee C h ap ter 10).
3.5.4 Manual versus Genetic Programming
Programming by h and is th e trad itional meth od of generating u s ef u l
p rograms - it is wh at we cal l th e craf ts man ap p roach to p rogramming.
A f ter th e inv ention of th e v on Neu mann mach ine, th is p rogramming
meth od was greatl y f acil itated by al l owing p rograms to be inp u t in
th e s ame way as d ata were h and l ed . By th is time, p rograms cons is ted
of nu mbers s ymbol izing mach ine ins tru ctions to be execu ted d irectl y
by th e p roces s or.
A f irs t s tep in abs traction took p l ace, wh en ins tead of mach ine
ins tru ction bits , as s embl er cod e cou l d be written to ins tru ct th e pro
ces s or. A trans l ation s tep h ad to be ad d ed to th e p roces s ing of p ro
grams th at trans f ormed th e memo cod e of as s embl er into mach ine-
u nd ers tand abl e s equ ences of ins tru ctions .
Later, h igh -l ev el l angu ages were u s ed for writing p rograms , e.g.,
A LGO L - a l angu age for d ef ining al gorith ms - or C O BO L and FO R
TRA N, al l of th em p articu l arl y s u ited to s p ecif ic ap p l ications of th e
comp u ters av ail abl e at th at time. A l s o, LI S P ap p eared at th is time,
bu t, for s ome time, remained a l angu age to be interp reted ins tead of
comp il ed . C omp il ation was a tech niqu e d ev el op ed with th e arriv al of
h igh -lev el l angu ages .
Th e introd u ction of h igh -l ev el l angu ages was a big s tep in making
p rogrammers more ef f icient, s ince writing an abs tract p rogram th at
cou ld l ater be comp il ed into mach ine l angu age al l owed an av erage
manu al p rogrammer to p rod u ce more l ines of cod e p er time u nit in
terms of mach ine l angu age.
A n ev en more abs tract l angu age l ev el is p rov id ed by tool s for
al gebraic s p ecif ication. Us ing al gebraic s p ecif ication, th e p rogram
mer d oes not ev en h av e to write h igh -l ev el cod e. I ns tead , h e or s h e
sp ecifies th e d es ired beh av ior in an abs tract beh av ioral d es crip tion
s ys tem wh ich th en generates s ou rce cod e to be comp il ed by a regu l ar
comp il er.
O ne migh t reas onabl y as k wh eth er GP cou l d be ap p l ied to alge
braic s p ecif ication. I n oth er word s : Wou l d it be p os s ibl e to ev ol v e
p rograms on th e l ev el of an al gebraic s p ecif ication th at onl y l ater on
wou ld be trans l ated into cod e? To ou r knowl ed ge, nobod y h as tried
GP on th is l ev el yet, bu t it migh t be a f ru itf u l area to work in.
If we now conf ront th e manu al meth od of writing p rograms with
an au tomatic one l ike GP, th e s imil arities are s triking.
C ons id er, for ins tance, th e meth od p rogrammers u s e wh o d o not
h av e a good command of a certain p rogramming l angu age. A s an
examp l e of s u ch a l angu age, l et u s imagine a macro-as s embl er lan
gu age th at, with ou t ins u l ting anyone, we can cons id er to be nearl y
obs ol ete in th e l ate 1990s . Nev erth el es s , s u p p os e th at many ap p li
cations in a certain d omain, s ay d atabas es , are written with th is
macro-as s embl er l angu age. I n ord er to ad ap t s u ch an ap p l ication -
a p rogram - to a new env ironment, s ay anoth er qu ery typ e or oth er
content and u s er typ e, th e cod e s egments written in macro-as s embl er
h av e to be rewritten.
How d o p rogrammers d o th is job? Th e mos t p rod u ctiv e way
to d o it is by wh at is known as "cu t and p as te." Th ey wil l take
u sefu l s egments from ol d er ap p l ications and p u t th em togeth er for
th e new one. Th ey wil l al s o ch ange th os e s egments s l igh tl y in ord er to
make th em v iabl e in th e new ap p l ication. S l igh t ch anges migh t mean
u s ing d if f erent v ariabl es or ch anging a v ery few l ines of s u brou tines
al read y in exis tence. S ometimes it migh t be neces s ary to write a new
s u brou tine al togeth er, bu t th os e ev ents will be kep t to a minimu m.
S ome ol d er s u brou tines wil l get cop ied ov er to th e new ap p li
cation, bu t th e corres p ond ing cal l s will nev er be mad e s ince th eir
f u nctional ity h as ceas ed to be imp ortant in th e new env ironment.
Programmers wil l eith er s ee th is by anal yzing th e cod e, and cu t th e
rou tines ou t, or th ey wil l comment th es e rou tines ou t, or th ey wil l
not d are to d ecid e and wil l s imp l y l eav e th em in for th e ap p l ication
to ch oos e wh eth er or not to u s e th em.
A f ter ev eryth ing h as been p u t togeth er, a p rogrammer wil l com
p il e th e res u l ting cod e, d ebu g it. and tes t wh eth er th e new fu nction
al ity h as been reach ed or not. Typ ical l y, th is is an iterativ e p roces s
of ad d ing and d el eting s egments as well as tes ting d if f erent as p ects
of th e ap p l ication, mov ing from eas y to h ard ones .
Th e l as t few p aragrap h s h av e d es cribed in terms of a d atabas e
p rogrammer [Lu d v iks on, 1995] a p roced u re th at may be id entif ied
with actions taken by a genetic p rogramming s ys tem. C u t and p as te
trans l ates into cros s ov er of ap p l ications , generation of new s egments
or l ines of cod e trans l ates into mu tations , and d ebu gging and tes ting
corres p ond to s el ection of th os e p rograms th at f u nction p rop erl y. O n
th e oth er h and , one wou l d h op e th at a good p rogrammer wou l d take
more inf ormed s tep s th rou gh th e s earch s p ace th an wou l d rand om
mu tation.
I ncid ental l y, th e f act th at mu ch cod e is u nu s ed or commented ou t
f ind s its corres p ond ence in s o-cal l ed introns au tomatical l y ev ol v ing in
GP p rograms .
Th e main d if f erence between p rogramming by h and in th is way
and au tomatic tool s l ike a GP s ys tem is th at GP can af f ord to ev ol v e
a p op u l ation of p rograms s imu l taneou s l y, wh ich is s ometh ing a s ingl e
p rogrammer cou l d not d o.
O ne major p oint to u nd ers tand f rom th is examp l e is th at a pro
grammer wou l d onl y work in th is way if
Q th e env ironments ch anged onl y s l igh tl y between ap p l ications ,
or
Q th e p rogramming l angu age was h ard to h and l e.
We can concl u d e th at it mu s t be v ery h ard for a GP s ys tem to gen
erate cod e with ou t any id ea of wh at a giv en argu ment or f u nction
cou l d mean to th e ou tp u t.
Exercises
1. Giv e two el ementary comp onents of ev ol u tionary l earning.
2. How many p ermu tations of th e l is t of natu ral nu mbers s mal l er
th an 10 are th ere?
3. Giv e th e nu mber of p rograms rep res ented as binary trees with
L terminal s and K f u nctions .
4. Wh at is th e bes t-known meth od for generating rand om num
bers ? How d oes it work?
5. Wh at is cond itional p robabil ity?
6. E xp l ain th e term probability distribution . Def ine two d if f erent
p robabil ity d is tribu tions .
7. Wh at is a Tu ring mach ine, and in wh at s ens e is it s imil ar to a
mod ern comp u ter?
8. I s it al ways p os s ibl e to d ecid e if an ind iv id u al in a GP s ys tem
wil l end execu tion? E xp l ain.
9. Giv e an examp l e of a comp u ter l angu age th at is Tu ring com
p l ete and of one th at is not.
10. Wh at is a tree d ata s tru ctu re, and wh at are its bas ic comp o
nents ?
11. Wh at is th e d if f erence between as s embl y l angu age and binary
mach ine cod e?
12. Giv e at l eas t two d if f erent comp u ter l angu age p arad igms .
Further Reading
W. Fel l er,
A N I NTRO DUC TI O N TO PRO BA BI LI TY THE O RY
A ND I TS A PPLI C A TI O NS , VO LUME S 1 A ND 2.
Wiley, New York, NY., 1968 and 1971.
M. Li and P.M.B. Vitanyi,
I NDUC TI VE RE A S O NI NG A ND KO LMO GO RO V C O MPLE XI TY.
JC S S 44(2): 343-384, 1992.
R. Motwani and P. Ragh av an,
RA NDO MI ZE D A LGO RI THMS .
C ambrid ge Univ ers ity Pres s , C ambrid ge, 1995.
I . Niv en,
THE MA THE MA TI C S O F C HO I C E .
MMA , Was h ington, DC ., 1965.
E . S anch ez and M. Tomas s ini (E d s .),
TO WA RDS E VO LVA BLE HA RDWA RE .
LNC S 1062, S p ringer, Berl in, 1996.
R. S tans if er,
THE S TUDY O F PRO GRA MMI NG LA NGUA GE S .
Prentice Hal l , Lond on, 1995.
A .M. Tu ring,
O N C O MPUTA BLE NUMBE RS , WI TH A N A PPLI C A TI O N
TO THE E NTS C HE I DUNGS PRO BLE M.
Proceed ings of th e Lond on Math ematical S ociety, S eries 2, Vol. 42,
1939.
N. Wirth ,
A LGO RI THMS -f DA TA S TRUC TURE S = PRO GRA MS .
in PRE NTI C E -HA LL S E RI E S IN A UTO MA TI C C O MPUTA TI O N.
Prentice Hal l , E ngl ewood C liffs , NJ, 1976.
1
4 Genetic Programming
as Evolutionary
Computation
C ontents
4. 1 The Dawn of Genetic Programming
Setting the Stage 88
4.2 Evolutionary Algorithms:
The General View 91
4.3 Flavors of Evolutionary Algorithms 95
4.3.1 Genetic Algorithms 95
4.3.2 Evolutionary Strategies 98
4.3.3 Evolutionary Programming 100
4.3.4 Tree-Based GP 101
4.4 Summary of Evolutionary Algorithms 102
A p roces s wh ich l ed f rom amoeba to man ap p eared to p h il os op h ers
to be obv iou s l y a p rogres s , th ou gh wh eth er th e amoeba wou l d
agree with th is op inion is not known.
B. RUS S E LL, 1914
Th e id ea of ev ol v ing comp u ter p rograms is al mos t as old as th e com
p u ter its elf . Pioneering comp u ter s cientis t Tu ring env is ioned it al
read y in th e earl y 1950s , bu t th e f iel d was not s ys tematical l y exp l ored
for anoth er 40 years . We h av e al read y brief l y l ooked at Fried berg's
work from th e l ate 1950s [Fried berg, 1958] [Fried berg et al ., 1959],
and th is work can be cons id ered th e embryonic s tage of p rogram evo
l u tion, or genetic p rogramming. Fried berg's work at th is time was
onl y one of many ef f orts toward au tomatic p rogram ind u ction.
Th e id ea of au tomatic p rogramming is natu ral , once you h av e
l earned h ow comp l ex and ted iou s manu al p rogramming is . I t h as
been a p art of th e artif icial intel l igence and mach ine l earning f iel d s
ev er s ince. Th e qu es t h as s earch ed d own many d if f erent road s . O ne
track h as l ead to th e creation of th e "art" of comp il er writing. I n
th is ch ap ter, h owev er, we will f ocu s on th e backgrou nd of genetic
p rogramming in th e l igh t of oth er tech niqu es for s imu l ating ev ol u tion.
Bu t f irs t a few word s on th e n ame GP.
Th e term gen etic programmin g was coined ind ep end entl y by Koza
and d e Garis , wh o both s tarted u s ing th e term in p ap ers in 1990 to
l abel th eir own, d if f erent tech niqu es . Wh en Koza's d ef inition of th e
term s tarted to d ominate af ter h is imp ortant 1992 book, d e Garis
s witch ed to "ev ol u tionary engineering" and af ter th at GP - to many
p eop l e - rep res ented th e ev ol u tion of p rogram s tru ctu res in tree or
LI S P f orm. Howev er, as s h ou l d be cl ear by now, in th is book we u s e
genetic p rogramming as an u mbrel l a term for al l f orms of ev ol u tionary
p rogram ind u ction.
4.1 The Dawn of Genetic Programming
Setting the Stage
Genetic p rogramming is one of many tech niqu es for comp u ter simu
l ation of ev ol u tion. Latel y th e general term evolution ary algorithms
(EA ] h as emerged for th es e tech niqu es . E A s mimic as p ects of natu ral
ev ol u tion, natu ral s el ection, and d if f erential rep rod u ction. I n C h ap
ter 2 we h av e s een h ow Darwin's p rincip l e of natu ral s el ection is u s ed
to exp l ain th e ev ol u tion of al l life f orms on E arth . Variou s as p ects
of th is p rincip l e h av e been s imu l ated in comp u ters , beginning with
Fried berg's work.
Until recentl y, mos t ef f orts h av e been in areas oth er th an pro
gram ind u ction, of ten as meth od s for op timization. E v ol u tionary
al gorith ms work by d enning a goal in th e f orm of a qu al ity criterion
and th en u s e th is goal to meas u re and comp are s ol u tion cand id ates
in a s tep wis e ref inement of a s et of d ata s tru ctu res . If s u cces s f u l , an
E A wil l retu rn an op timal or near op timal ind iv id u al af ter a nu mber
of iterations . I n th is s ens e, th e al gorith ms are more s imil ar to breed
ing of, l et u s s ay. d ogs th an to natu ral s el ection, s ince breed ing al s o
works with a wel l -d ef ined qu al ity criterion.
Wh en d ogs are bred to h av e, for examp l e, l ong h air and s h ort l egs ,
th e breed er s el ects - f rom a grou p of ind iv id u al s - th e bes t ind iv id u al s
for rep rod u ction accord ing to th is qu al ity criterion. I n th is cas e, h e or
s h e s el ects th e ones with th e l onges t h air and s h ortes t l egs for mating.
Th e p roces s is rep eated with th e of f s p ring ov er many generations of
d ogs u ntil a s atis f ying ind iv id u al is f ou nd - and a S iberian Hu s ky h as
been tu rned into an A ngora Dach s h u nd . Th e s ame meth od h as giv en
ou r p igs an extra rib in onl y 30 years .
Th is ap p roach is v ery s imil ar to th e bas ic p rincip l e of al l evolu
tionary tech niqu es . Th e p roces s of s el ecting th e bes t ind iv id u al s for
mating is s imp l y cal l ed selection or, more accu ratel y, matin g selec
tion . I t wil l be d is cu s s ed in d etail in th e next ch ap ter. Th e qu al ity
criterion is of ten ref erred to as fitn ess in E A s and it is with th is
s tand ard we d etermine wh ich ind iv id u al s s h al l be s el ected . We al s o
need a tech niqu e for mating and rep rod u ction. I n th e rep rod u ction
p roces s it is imp ortant to h av e a mech anis m for variation - to gen
erate a d if f erential and to make s u re th at ch il d ren d o not become
id entical cop ies of th eir p arents , wh ich wou l d rend er imp rov ements
imp os s ibl e.
Th e two main v ariation op erators in E A s - and in natu re - are
mu tation and exch ange of genetic material between ind iv id u al s . Mu
tation ch anges a s mal l p art of an ind iv id u al 's genome wh il e cros s ov er
(recombination and s exu al rep rod u ction) exch anges genetic material
u s u al l y between two ind iv id u al s , to create an of f s p ring th at is a com
bination of its p arents . Dif f erent E A tech niqu es u s u al l y emp h as ize
d if f erent v ariation op erators - s ome work mos tl y with mu tation wh il e
oth ers work mos tl y with cros s ov er. A n il l u s tration of a bas ic E A can
be s een in Figu re 4.1.
S ometimes th e bou nd aries between E A s and oth er s earch algo
rith ms are fu zzy. Th is is al s o tru e for th e bou nd aries between E A s
th at are GP and th os e th at are not. I n any cas e, Fried berg in 1958
can be cons id ered one of th e p ioneers of E A s and GP, ev en th ou gh
h is work l acks s ome of th e p res entl y more common E A and GP in
gred ients and ev en th ou gh h e was h amp ered by th e cons traints of th e
comp u ter p ower av ail abl e at th at time.
Figure 4. 1
Basic evolutionary
algorithm
The Bremermann Limit
Th e objectiv e of Fried berg's s ys tem was to ind u ce an as s embl er
l angu age on a v irtu al one-bit regis ter mach ine. Du e to th e l imited
comp u ter res ou rces in h is d ay, th e ind u ced s tru ctu res - h is p rograms -
cou l d onl y tackl e mod es t p robl ems l ike ad d ing two bits .
Bu t th e s itu ation was not as bad as one migh t th ink. A t l eas t,
th is was th e argu ment of anoth er p ioneer at th e time, Bremermann.
Bremermann as ked h ims el f wh eth er th ere is a p rincip al l imit to com
p u tation th at comp u ters wil l nev er be abl e to break th rou gh . I n h is
s eminal p ap er [Bremermann, 1962], h e noted th at no d ata p roces s ing
s ys tem, wh eth er artif icial or l iv ing, can p roces s more th an 2 x 10
47
bits p er s econd p er gram of its mas s . He arriv ed at th at s u rp ris ing
concl u s ion by an energy cons id eration, taking into accou nt Heis en-
berg's u ncertainty p rincip l e in combination with Pl anck's u niv ers al
cons tant and th e cons tant s p eed of l igh t in v acu u m. Bremermann's
argu ment continu ed th at if we'd h ad a comp u ter th e s ize and mas s of
th e E arth at ou r d is p os al comp u ting f rom th e E arth 's birth , we wou l d
anyway not be abl e to p roces s more th an 10
93
bits of inf ormation.
C ons id ering combinatorial p robl ems , th is s o-cal l ed Bremermann l imit
is actu al l y riot v ery l arge. C oncl u d ing h is p ap er, Bremermann wrote:
Th e exp eriences of v ariou s grou p s wh o work on p robl em s ol v ing,
th eorem p rov ing, and p attern recognition al l s eem to p oint in th e
s ame d irection: Th es e p robl ems are tou gh . Th ere d oes not s eem
to be a royal road or a s imp l e meth od wh ich at one s troke will
s ol v e al l ou r p robl ems . My d is cu s s ion of u l timate l imitations on
th e s p eed and amou nt of d ata p roces s ing may be s u mmarized l ike
th is : Probl ems inv ol v ing v as t nu mbers of p os s ibil ities will not be
s ol v ed by s h eer d ata p roces s ing qu antity. We mu s t look for qu al ity,
for ref inements , for tricks , for ev ery ingenu ity th at we can th ink
of. C omp u ters f as ter th an th os e of tod ay wil l be of great h el p . We
will need th em. Howev er, wh en we are concerned with p robl ems
in p rincip l e, p res ent d ay comp u ters are abou t as f as t as th ey wil l
ev er be.
H. BRE ME RMA NN, 1962
Retu rning to Fried berg, h is s tru ctu res were f ixed -s ize v irtu al as
sembler p rograms . His al gorith m was s tarted l ike mos t E A s with
rand om creation of one or more rand om s tru ctu res . A s a v ariation
op erator h e u s ed mutation - a rand om ch ange in a bit of h is p rogram
s tru ctu re.
Pried berg's ap p roach h as a s eriou s d rawback: h e emp l oys "bi
nary" f itnes s , th at is , a p rogram is eith er p erf ect or it is not. Th e
feed back inf ormation f rom a certain p rogram can n ot be u s ed for guid
ing th e s u bs equ ent s earch p roces s . Th u s , th e p roces s h as s imil arities
to s imp l e rand om s earch .
Th ou gh th e res u l ts f rom h is s ys tem were mod es t, it d ef initel y
rep res ents great p ioneering work in th e f iel d of E A s , GP, and ML. He
even cons id ered top ics th at ad v anced genetic p rogramming res earch
is concerned with tod ay, l ike p ars imony of p rograms ; s ee C h ap ter 10
of th is book.
I n th e next d ecad e - th e 1960s - s ev eral of tod ay's bes t known
E A s were created . I n th is ch ap ter we wil l take a l ook at th ree of
th em: genetic al gorith ms , ev ol u tionary p rogramming, and ev ol u tion
s trategies . Bu t f irs t we d ig d eep er into th e concep t of ev ol u tionary
al gorith ms .
4.2 Evolutionary Algorithms:
The General View
Natu ral ev ol u tion h as been p owerf u l enou gh to bring abou t biologi
cal p h enomena as comp l ex as mammal ian organis ms and h u man con
s ciou s nes s . I n ad d ition to generating comp l exity, biol ogical s ys tems
seem s o wel l ad ap ted to th eir env ironments and s o wel l equ ip p ed
with s ens ory and motor "d ev ices " th at th e imp res s ion of p u rp os ef u l
op timization is ev oked . Th is h as cau s ed an ongoing controv ers y in
biology abou t wh eth er ev ol u tion is ind eed op timizing s tru ctu res or
not [Du p re, 1987].
For mil l ennia, engineers h av e been ins p ired to l earn from natu re
and to ap p l y h er recip es in tech nol ogy. Th u s , ev ol u tion s timu l ated
two qu es tions :
Gleaning Recipes from
Evolution
1. Does cop ying ev ol u tion h el p in th e op timization of tech nical
d ev ices , s u ch as airp l ane wings , car motors , or recep tors and
s ens ors for certain p h ys ical s ignal s ?
2. Does cop ying ev ol u tion p rov id e u s with th e creativ ity to gen
erate new and comp l ex s ol u tions to wel l -known d if f icu lt p rob
l ems ?
Brou gh t into th e real m of comp u ter s cience, th es e qu es tions cou l d
read as :
1. Does s imu l ating ev ol u tion (with "ev ol u tionary al gorith ms ") pro
v id e u s with a tool to op timize p robl em s ol u tions ?
2. Does it p rov id e a tool to bu il d s ol u tions by generating comp lex
ity th rou gh combination of p rogram cons tru cts ? '
E v ol u tionary al gorith ms are aimed at ans wering th es e qu es tions .
Bas ed on v ery s imp l e mod el s of organic ev ol u tion, th es e al gorith ms
aim to catch th e bas ic s u cces s ingred ients of natu ral ev ol u tionary
p roces s es . E qu ip p ed with th os e bas ic ingred ients , E A s are ap p l ied to
v ariou s p robl ems in comp u ter s cience th at are not eas y to s ol v e by
conv entional meth od s , s u ch as combinatorial op timization p robl ems
or l earning tas ks .
Dif f erent f lav ors of E A s h av e been d ev el op ed ov er th e years , bu t
th eir main ingred ients can be s u mmarized as :
Q Pop u l ations of s ol u tions
Q I nnov ation op erations
C J C ons erv ation op erations
Q Qu al ity d if f erential s
Q S el ection
C ons id er an op timization p robl em. Th e f irs t d ecis ion to be mad e
is h ow to rep res ent a s ol u tion. I n E A s , s ol u tions are rep res ented by
genotyp es , genomes , or ch romos omes .
1
O nce a rep res entation for a
s ol u tion h as been f ixed , a ju d gment of a s ol u tion cand id ate s h ou l d
be p os s ibl e, bas ed on th e p robl em to be s ol v ed . Th e rep res entation
al l ows u s to encod e th e p robl em, e.g., by a s et of p arameters th at are
to be ch os en ind ep end entl y from each oth er. A p articu l ar ins tantia
tion of th is rep res entation s h ou l d be ju d ged , giv ing a qu al ity of th e
s ol u tion u nd er cons id eration. Th e qu al ity migh t be meas u red by a
1
Note th at genotyp es and s ol u tions of ten are not id entical !
p h ys ical p roces s , by an ev al u ation f u nction to be s p ecif ied in ad v ance,
or ev en by a s u bjectiv e ju ror, s itting in f ront of th e comp u ter s creen.
Us u al l y, E A s work with a p op u l ation of s ol u tions , in ord er to
enabl e a p aral l el s earch p roces s . I nd eed , th e righ t ch oice for th e
s ize of a p op u l ation is s ometimes d ecis iv e, d etermining wh eth er a
ru n comp l etes s u cces s f u l l y or not. We s h al l l earn more abou t th is in
th e context of genetic p rogramming. Pop u l ation s ize is general l y an
imp ortant p arameter of E A s .
O nce a rep res entation h as been ch os en th at can be p l u gged into
a d ecod er, res u l ting in a rating of ind iv id u al s ol u tions , corres p ond ing
op erators h av e to be d ef ined th at can generate v ariants of th e solu
tion. We h av e mentioned two cl as s es of op erators abov e, innov ation
op erators and cons erv ation op erators .
I nnov ation op erators ens u re th at new as p ects of a p robl em are
cons id ered . I n terms of ou r op timization p robl em abov e, th is wou l d
mean th at new p arameter v al u es are tried , in eith er one or more of
th e d if f erent p arameter p os itions . Th e innov ation op erator in E A s is
mos t of ten cal l ed mu tation, and it comes with th ree E A p arameters
d etermining:
Q its s trength with in a comp onent of a s ol u tion,
Q its s p read in s imu l taneou s ap p l ication to comp onents with in a
s ol u tion,
Q and its f requ ency of ap p l ication with in th e entire al gorith m.
A v ery s trong mu tation op erator wou l d bas ical l y generate a ran
d om p arameter at a giv en p os ition with in a s ol u tion. If ap p l ied to al l
p os itions with in a s ol u tion, it wou l d generate a s ol u tion comp l etel y
u ncorrel ated with its origin, and if ap p l ied with maximu m f requ ency,
it wou l d eras e al l inf ormation generated in th e p op u l ation d u ring th e
E A s earch p roces s s o f ar.
C ons erv ation op erators are u s ed to cons ol id ate wh at h as al read y
been "l earned " by v ariou s ind iv id u al s in th e p op u l ation. Recombi
nation of two or more s ol u tions is th e p rimary tool for ach iev ing th is
goal . Prov id ed th e d if f erent p arameters in ou r s ol u tion rep res entation
are s u f f icientl y ind ep end ent from each oth er, combinations of u s ef u l
p ieces of inf ormation from d if f erent ind iv id u al s wou l d res u l t in better
ov eral l s ol u tions . Th u s , in th e id eal cas e, a mixing of th e informa
tion s h ou l d take p l ace th at wil l accel erate th e s earch for th e gl obal l y
op timal s ol u tion.
Th ere are d if f erent ways to ach iev e a mixing of s ol u tions . For th e
s ake of s imp l icity, h ere we s h al l concentrate on two ind iv id u al s recom-
bining th eir inf ormation, al th ou gh mu l ti-recombinant meth od s al s o
Linkage and Epistasis
Quality Differentials
Selection
EA as Dynamical
Systems
exis t in th e l iteratu re. Wel l -known recombination meth od s are one-
p oint, two-p oint, or n-p oint cros s ov er for binary (d is crete) p arameter
v al u es between two ind iv id u al s , as well as d is crete and intermed iate
recombination for n-ary or continu ou s p arameter v al u es . Dep end
ing on th es e f eatu res , th es e op erators carry a s et of E A p arameters
gov erning:
Q typ e of recombination
Q its f requ ency of ap p l ication with in th e entire al gorith m
Giv en th es e two means of exp l oring th e s earch s p ace, a s ol u tion
s h ou l d be f ou nd qu ite ef f iciently. Unf ortu natel y, real ity is not u s u al l y
s o s imp l e, and th ere are many interrel ations h ip s between v ariou s com
p onents of a p robl em s ol u tion. Th is is cal l ed l inkage and p roh ibits
ef f icient s earch , s ince th e v ariation of one p arameter migh t h av e a
negativ e inf l u ence on ov eral l f itnes s d u e to its l inkage with anoth er.
I n ef f ect, we are d eal ing with non-l inear p robl ems h ere, with an in
teraction between comp onents . I n th e l iteratu re, th is p h enomenon is
s ometimes cal l ed epistasis.
With th e generation of genotyp ic v ariants one wou l d exp ect dif
f erences in p h enotyp ic beh av ior to ap p ear in th e p op u l ation. A s
Pried berg's work h as d emons trated , h owev er, th is is not neces s aril y
th e cas e. If th ere was onl y a binary f itnes s f u nction (s tating a solu
tion by "1" and no s ol u tion by "0"), th en th ere wou l d not be enou gh
d if f erence between ind iv id u al s in th e p op u l ation to d riv e an evolu
tionary s earch p roces s . A n al gorith m of th is kind wou l d d egenerate
into a mu l ti-membered bl ind s earch . Th u s , a v ery imp ortant as p ect
of E A s is a grad ed f itnes s f u nction th at d is tingu is h es a better s ol u tion
f rom a good one.
I t is on th es e d if f erential s th at s el ection can work on. Du e to
th e f initenes s of a p op u l ation, not al l th e v ariants generated by th e
means mentioned abov e can be s tored . Th is f orces u s to s el ect from
th e v ariants both th e cand id ates to be incl u d ed and th e ind iv id u al s
from th e p op u l ation th at are d u e for rep l acement. Fol l owing Darwin,
th is p roces s is cal l ed s el ection.
From a d ynamical s ys tems p oint of v iew, th e op erators of an E A
work to d es tabil ize a p op u l ation, and th e s el ection op erator works
to s tabil ize it. Th u s , if one is l ooking for good s ol u tions to an op ti
mization p robl em, good s ol u tions s h ou l d tend to be s tabl e wh ereas
bad s ol u tions s h ou l d tend to be u ns tabl e. Th e art of ch oos ing an ap
p rop riate rep res entation and an ap p rop riate s et of op erators is of ten
a matter of exp erience and intu ition, and can onl y be mas tered by
working with th e al gorith ms .
4.3 Flavors of Evolutionary Algorithms
E v en if th e bas ic ingred ients of E A s are qu ite s imil ar, th ere are hun
d red s of v ariants to E A s . I n th is s ection, we l ook at th ree earl y
ap p roach es th at were mos t inf l u ential and il l u s trate th e cl imate in
wh ich GP was born.
4.3.1 Genetic Algorithms
O ne of th e bes t known E A s is th e gen etic algorithm (GA ) d ev el
op ed by Hol l and , h is s tu d ents , and h is col l eagu es at th e Univ ers ity
of Mich igan [Hol l and , 1992], Th e GA is an imp ortant p red eces s or of
genetic p rogramming, from wh ich th e l atter d eriv ed its name. GA s
h av e p rov ed u s ef u l in a wid e v ariety of real -worl d p robl ems .
Th e original GA h as two main ch aracteris tics : it u s es a f ixed
l ength binary rep res entation and makes h eav y u s e of cros s ov er. Th e
s imp le rep res entation of ind iv id u al s as f ixed l ength s trings of zeros
and ones (Figu re 4.2) p u ts th e s p otl igh t on an imp ortant is s u e of al l
E A s mentioned in C h ap ter 1 - th e encod ing of th e p robl em. I n GA s
we mu s t f ind a s u itabl e way to cod e a s ol u tion to ou r p robl em as a
binary s tring. Find ing good cod ing s ch emes is s til l an art, and th e
s u cces s of a GA (and E A ) ru n of ten d ep end s on th e cod ing of th e
p robl em.
Figure 4.2
Problem representation in
the binary string of a GA
Th e commones t f orm of cros s ov er is cal l ed one-p oint cros s ov er
and is il l u s trated in Figu re 4.3. Two p arent ind iv id u al s of th e s ame
l ength are al igned with each oth er and a cros s ov er p oint is ch os en at
rand om between any of th eir comp onent p os itions . Th e tail s of th e
two ind iv id u al s f rom th is p oint onward are s witch ed , res u l ting in two
new of f s p ring.
Like many GP s ys tems , GA s f ocu s on th e cros s ov er op erator. I n
mos t ap p l ications of GA s , 95% of op erations are eith er rep rod u ction,
i.e., cop ying s trings , or cros s ov er. Us u al l y, onl y a s mal l p robabil ity is
u sed for mu tations .
A noth er key ingred ient to GA s , at l eas t u ntil th e l ate 1980s , was
f itnes s -p rop ortional s el ection. Fitnes s -p rop ortional s el ection as s igns
rep rod u ction op p ortu nities to ind iv id u al s bas ed on th eir rel ativ e f it
nes s in th e p res ent p op u l ation. Th u s , it is a s toch as tic p roces s of
Fitness- Proportional
Selection
Figure 4.3
The one-point crossover
operator in genetic
algorithms
s el ection, wh ich wil l d raw ind iv id u al s on th e bas is of th eir p erfor
mance as comp ared to oth er ind iv id u al s . I t is al s o cal l ed rou l ette
wh eel s el ection. E ach ind iv id u al gets a p art of a rou l ette wh eel in
p rop ortion to its f itnes s and th e av erage f itnes s of al l oth er ind iv id
u al s . Th e rou l ette wh eel s p ins , and if an ind iv id u al h as th e l u cky
nu mber it is al l owed to rep rod u ce its el f into th e next generation.
Th is s imp l e s el ection mech anis m contains one of th e bas ic p rincip l es
of E A s el ection - more ind iv id u al s th an th e bes t one h av e a ch ance
to rep rod u ce. Th is p rincip l e h as been s h own to be es s ential in gu ar
anteeing genetic d iv ers ity and h el p s keep th e s earch away f rom l ocal
op tima.
A f ter rep rod u ction h as taken p l ace, a certain p ercentage of th e
p op u l ation is al l owed to v ary by cros s ov er (mos tl y) and mu tation
(rarel y); s ee S ection 4.3. Dif f erent f orms of s el ection are d is cu s s ed in
more d ep th in th e next ch ap ter.
Schemata
Theoretical Aspects
Fitnes s -p rop ortional s el ection is al s o a key ingred ient in one of th e
main th eoretical ach iev ements of GA s : th e notion of bu il d ing bl ocks
and s ch emata.
Th e id ea is th at, giv en a certain p robl em rep res entation, th e GA
is abl e th rou gh rep eated cros s ov er and rep rod u ction to combine th os e
p arts of a s ol u tion th at are neces s ary to f orm a gl obal l y op timal
s ol u tion. Th e argu ment is th at each ind iv id u al in th e p op u l ation
p articip ates in nu merou s ways in th e s earch p roces s in ev ery giv en
generation by exp os ing d if f erent s ch emata to th e ev al u ation p roces s .
A s ch ema is a s tring th at contains 0, 1, and * (i.e., "d on't care")
s ymbol s . I n f act, * s ymbol s are th e ch aracteris tic f eatu re of s ch emata,
coming abou t by p rojections into d if f erent s u bs p aces of th e entire
s earch s p ace. C l earl y, each ind iv id u al is al ways mov ing in many s u b-
s p aces at th e s ame time. Hol l and argu ed [Hol l and , 1975] th at th e
GA actu al l y p rogres s es by th is s amp l ing of s u bs p aces .
Hol l and f ormu l ated a th eorem, th e s ch ema th eorem of GA s , s tat
ing th at, p rov id ed f itnes s -p rop ortional s el ection is u s ed , th e p robabil
ity of certain s ch emata to ap p ear in th e p op u l ation s h if ts ov er time in
su ch a way as to ap p roach th e ov eral l f itnes s op timu m. Th e s ch ema
th eorem is ev en more s p ecif ic in giv ing a lower bou nd on th e s p eed
for s el ecting better s ch emata ov er wors e.
Th e s ch ema th eorem h as , among oth er th ings , motiv ated th e u s e
of binary rep res entation in GA s . I t can be argu ed f rom th is th eorem
th at th e al p h abet in a GA s h ou l d be as s mal l as p os s ibl e. Natu ral l y,
th e binary al p h abet with onl y two members is th e s mal l es t. Th is
p rincip l e is d is p u ted , bu t we can note th at natu re u s es a qu ite s mal l
al p h abet of f ou r l etters in its DNA cod e.
Th e s ch ema th eorem h as been criticized h eav il y in recent years for
not being abl e to exp l ain wh y GA s work. O ne of th e main reas ons
was its extrap ol ation of f itnes s d ev el op ments f rom generation n to
generation n + k. I t is general l y not p os s ibl e to ap p l y a d if f erence
equ ation recu rs iv el y k times and h av e an accu rate meas u re of th e
p robabil ities of s ch emata occu rrence in th e l ong term with ou t v ery
res trictiv e as s u mp tions abou t th e u nd erl ying p roces s .
Representation of Individuals and Genetic Operators
Th e u s ef u l nes s of binary s trings as rep res entations of op timization
p robl ems h as been ch al l enged ov er th e years . With in th e l as t d ecad e,
more and more v ariants of genetic al gorith ms h av e been p u t f orward
th at d o not u s e binary rep res entations . For examp l e, cons traint op ti
mization p robl ems as th ey ap p ear in mos t p ractical ap p l ications h av e
sh own a tend ency to f av or oth er rep res entations [Mich al ewicz, 1994].
A rep res entation s h ou l d al ways ref l ect f u nd amental f acts abou t
th e p robl em at h and . Th is not onl y makes u nd ers tand ing of th e
s earch eas ier bu t it is of ten a p recond ition of s u cces s f u l GA ru ns .
C orres p ond ingl y, genetic op erators h av e to be ch os en th at al l ow
u nres tricted mov ement in th e p robl em s p ace s p anned by th e ch os en
rep res entation.
Classifier Systems
In h is 1975 book [Hol l and , 1975], Hol l and mentioned A I as one of th e
main motiv ations for th e creation of genetic al gorith ms . He d id not
exp eriment with d irect u s e of GA s to ev ol v e p rograms bu t contribu ted
to th e creation of anoth er res earch f iel d with th e inv ention of th e
classifier systems. Hol l and and Reitman p rop os ed th is typ e of s ys tem
in 1978 [Hol l and and Reitman, 1978].
A cl as s if ier s ys tem ind u ces a general -p u rp os e Tu ring comp l ete
al gorith m comp ris ing th ree comp onents : a ru l e-bas ed p rogramming
l angu age, a s imu l ated market economy, and a genetic al gorith m. Th e
ru l es are th e ind iv id u al s in th e genetic al gorith m. Togeth er, al l th e
ru l es can be s een as a p rogram p erf orming a tas k. Wh en certain ru l es
f ire in res p ons e to s ome inp u t, th e s ys tem generates s ome ou tp u t.
A ny "reward " for th e ou tp u t gets accred ited a f itnes s p rop ortional
to th e contribu ting ru l es , wh ich are th e ind iv id u al s . Th e genetic al
gorith m th en op erates on th e ru l es . Ru l es res u l ting f rom th e genetic
al gorith m bu il d th e next p otential l y mod if ied cl as s if ier s ys tem. Th e
metap h or is borrowed f orm a market economy wh ere many ind iv id
u al s co-operate an d compete to ach iev e h igh er ef f iciency in s ol v ing a
goal and each ind iv id u al is reward ed for its p art in th e s u cces s .
A cl as s if ier s ys tem is not regard ed as ev ol u tionary p rogram in
d u ction s ince th e comp l ete p rogram is not ev ol v ed in th e ind iv id u al s
of th e p op u l ation. Th e ind iv id u al ru l es in a cl as s if ier s ys tem are not
cap abl e of s ol v ing th e tas k by th ems el v es .
Howev er, in 1980, S mith [S mith , 1980] inv ented a v ariant of a
cl as s if ier s ys tems introd u cing v ariabl e-s ize s trings as ind iv id u al s . I n
h is ap p roach an ind iv id u al is a comp l ete ru l e-bas ed p rogram th at can
s ol v e th e tas k d ef ined by th e f itnes s f u nction. S ince h is s ys tem u s es
v ariabl e l ength rep res entation of Tu ring comp l ete ind iv id u al s , each
aiming al one at s ol v ing a p robl em, h is ap p roach can be cons id ered
an imp ortant s tep toward genetic p rogramming.
2
S mith ap p l ied h is
tech niqu e to th e objectiv e of f ind ing good p oker p l aying s trategies
and ru l es , with s ome s u cces s .
4.3.2 Evolutionary Strategies
E v ol u tionary s trategies (ES), d ev el op ed in th e 1960s , are anoth er
p arad igm in ev ol u tionary comp u tation. Newer accou nts of th e work
of its p ioneers , Rech enberg and S ch wef el, can be f ou nd in
[Rech enberg. 1994] [S ch wefel, 1995].
Th e id ea of u s ing ev ol u tion as a gu id ing p rincip l e and th u s of de
v el op ing ev ol u tionary s trategies aros e f rom p robl ems in exp erimental
op timization. Rech enberg and S ch wefel were working with h yd rod y-
namic p robl ems wh en th ey h it u p on th e id ea of u s ing rand om ev ents
by th rowing d ice to d ecid e th e d irection of an op timization p roces s .
Th u s , d is crete mu tations were th e f irs t ev ol u tionary v ariations to be
ap p l ied with in ev ol u tionary s trategies . Du e to th e l imitations of th e
We s h al l cal l th os e s ys tems "earl y genetic p rogramming."
bas ic exp erimental s etu p , onl y one object cou l d be cons id ered at a
time, s o th e p op u l ation cons is ted of one ind iv id u al onl y. Bu t th e
s el ection p roces s was al read y in p l ace, keep ing track of th e "f itnes s "
of an exp erimental conf igu ration and its v ariation d u e to th e rand om
mu tations ap p l ied .
S oon af terward s , d igital comp u ters became v al u abl e tool s and
ev ol u tionary s trategies were d ev is ed th at were abl e to op erate with
continu ou s v ariabl es . Fol l owing cl os el y th e trains of th ou gh t al
read y es tabl is h ed , ind iv id u al s were rep res ented as real -v al u ed v ectors ,
and mu tation was p erf ormed by ad d ing normal l y d is tribu ted rand om
nu mbers with exp ectation v al u e 0. I n th is ap p roach , s mal l v ariations
are mu ch more f requ ent th an l arge v ariations , exp res s ing th e s tate of
affairs on th e p h enotyp ic l ev el in natu re.
I n f act, it was al ways cons id ered a h al l mark of ev ol u tionary s trate
gies to emp h as ize cau s al ity, i.e.. th e f act th at s trong cau s es wou l d
generate s trong ef f ects . Trans l ated into ev ol u tionary s trategies , l arge
mu tations s h ou l d res u l t in l arge ju mp s in f itnes s , and s mal l mu tations
s h ou l d res u l t in s mal l ch anges in f itnes s .
I n l ater years , th e benef it of u s ing p op u l ations of ind iv id u al s was
recognized in ev ol u tionary s trategies by introd u cing d if f erent s orts of
recombination op erators . Dis crete recombination s el ects th e (contin
u ou s ) f eatu res from d if f erent p arents al ternativ el y, with an ad d itional
p arameter for th e s p ecif ication of 1-, 2-, or n-p oint recombination.
I ntermed iate recombination, on th e oth er h and , inv ol v es mixing th e
f eatu res s temming from th e p arents in a d if f erent way, s h u f f ling sin
gle f eatu res comp onent-wis e, by taking eith er th e arith metic mean
or oth er kind s of weigh ting. Recentl y, mu l ti-recombinant s trategies
h av e been s tu d ied as well [Beyer, 1995].
A l th ou gh s el ection will be d is cu s s ed in more d etail l ater (Sec
tion 5.5), a s h ort remark is in ord er h ere: I n ev ol u tionary s trategies ,
s el ection is a d eterminis tic op erator, wh ich ch oos es th e /z < A ind iv id
u al s to cons titu te th e p op u l ation in th e next generation. // d enotes
th e nu mber of (p res ent and f u tu re) p arents ; A d enotes th e nu mber
of of f s p ring. Th u s , s el ection in E S s is over-production selection , not
mating s el ection as in GA s . A s s u ch , it is nearer to wh at Darwin
cal l ed "natu ral s el ection" [S ch wefel and Ru d ol p h , 1995].
O ne oth er key as p ect of ad v anced E S s is to allow a l earning pro
ces s on th e l ev el of "s trategy p arameters " of th e al gorith m. Wh ereas
so far ev ol u tionary s trategies h av e concerned th ems el v es with ad ap t
ing p h enotyp ic v ariabl es (object v ariabl es ), it is p os s ibl e to as s ign
s trategy p arameters , l ike mu tation rate(s ) or recombination meth od ,
to each ind iv id u al . Doing th is res u l ts , ov er time, in a s el ection of
better ad ap ted ind iv id u al s , in both th e d omain of object v ariabl es
and th e d omain of s trategy p arameters .
By extend ing th e rep res entation of ind iv id u al s to incl u d e s trat
egy p arameters , h owev er, a d is tinction h as been introd u ced between
p h enotyp e and genotyp e. A nd al th ou gh th e s trategy p arameters are
s u bjected to th e s ame v ariation p ol icy (mu tation and recombination)
as are th e object p arameters , inf ormation in th e d omain not exp res s ed
in th e p h enotyp e d oes ev ol v e d if f erentl y th an in th e oth er d omain.
S el ection ind irectl y f av ors th e s trategy p arameter s ettings th at are
benef icial to make p rogres s in th e giv en p robl em d omain, th u s de
v el op ing an internal mod el of th e env ironment cons titu ted by th e
p robl em.
I n th e real m of ev ol u tionary s trategies , s tru ctu re ev ol u tion h as
been cons id ered by Loh mann [Loh mann, 1992].
4.3.3 Evolutionary Programming
A noth er imp ortant E A and p red eces s or of GP is evolution ary pro
grammin g (EP) al s o created in th e earl y 1960s by Fogel , O wens , and
Wal s h [Fogel et al , 1965] [Fogel et al ., 1966], E P u s es th e mu tation
op erator to ch ange f inite s tate mach ines (FS M). A f inite s tate ma
ch ine or f inite au tomaton is a v ery s imp l e comp u ter p rogram th at con
s is ts of a mach ine mov ing arou nd in a grap h of nod es cal l ed s tates .
Th e s tate au tomaton h as many s imil arities with a Tu ring mach ine
and u nd er th e righ t circu ms tances an FS M p rogram may be con
s id ered to be Tu ring comp l ete. E P u s es a col l ection of mu tations
th at manip u l ate s p ecif ic comp onents of th e rep res entation. I t op
erates more d irectl y on th e rep res entation th an GA s . E v ol u tionary
p rogramming emp l oys rand om creation, mu tation, and fitn ess-based
rep rod u ction: on av erage, a better ind iv id u al gets rep rod u ced more
of ten.
I n its original f orm, E P was u s ed to s ol v e s equ ence p red iction
p robl ems with th e h el p of f inite s tate mach ines . Th e FS Ms - rep re
s ented by trans ition tabl es and initial s tates - were al l owed to v ary
th rou gh mu tation in v ariou s as p ects , e.g., nu mber of s tates , initial
s tate, s tate trans ition, or ou tp u t s ymbol . We can s ee h ere th at E P
h as real ized a s ymbol ic rep res entation of comp u ter p rograms , f or
mu l ated as au tomata. I t h as s u cces s f u l l y ap p l ied th e ev ol u tionary
p rincip l es of v ariation and s el ection to a p robl em f rom artif icial in
tel l igence.
More s p ecif ical l y, E P s tarted with a p op u l ation of FS Ms th at
were al l owed to ch ange s tate accord ing to inp u t and p res ent s tate,
and were th en ev al u ated accord ing to wh eth er th e ou tp u t s ymbol s
p rod u ced by th e FS Ms agreed with th e f ollowing inp u t s ymbol or
not. I n th is way, th e entire s ymbol s equ ence was ru n and a f itnes s
was as s igned to each FS M. O f f s p ring FS Ms were generated by cop y-
ing mach ines and ap p l ying mu tations with u nif orm p robabil ity dis
tribu tion to th es e cop ies . Gau s s ian mu tations were u s ed to mod if y
nu meric comp onents s imil ar to h ow it is d one in E S . Th e Pois s on
d is tribu tion was u s ed to s el ect h ow many mu tations wil l be ap p l ied
to create a new FS M. Th e mu tations to FS Ms manip u l ated th e avail
abl e rep res entational comp onents , l ike, e.g., ad d s tate, d el ete s tate,
ch ange trans ition, ch ange initial s tate, ch ange ou tp u t s ymbol . I n a
typ ical ru n, th e better p erf orming h al f of th e p op u l ation was kep t
and th e res t was s u bs titu ted by v ariants of th e better h alf .
O ne s p ecif ic f eatu re of mu tation in E P is th at, as th e op timal
v al u e for f itnes s is ap p roach ed , th e mu tation rate is d ecreas ed . Th is
is ach iev ed by l etting th e f itnes s inf l u ence th e s p read of mu tations , for
examp l e, by tying it to th e v ariance of th e Gau s s ian d is tribu tion. Th e
nearer th e op timu m, th e s h arp er th e d is tribu tion becomes arou nd 0.
I n recent years , E P h as exp and ed in s cop e and h as taken u p oth er
meth od s , e.g., tou rnament s el ection, and h as al l owed oth er, d if f erent
p robl em d omains to be ad d res s ed by th e al gorith m, bu t s til l ref rains
from u s ing recombination as a major op erator for generating v ariants
[Fogel, 1995]. S el f -ad ap tation p roces s es are p u t into p l ace by al l owing
meta-al gorith mic v ariation of p arameters .
4.3.4 Tree-Based GP
With S mith 's d ev el op ment of a v ariant of Hol l and 's cl as s if ier s ys tems
wh ere each ch romos ome (s ol u tion cand id ate) was a comp l ete p rogram
of v ariabl e l ength we migh t h av e h ad th e f irs t real ev ol u tionary s ys tem
ind u cing comp l ete p rograms , ev en th ou gh th is ap p roach was s til l bu il t
on th e p rod u ction ru l e p arad igm.
Two res earch ers , C ramer [C ramer, 1985] and Koza [Koza, 1989],
s u gges ted th at a tree s tru ctu re s h ou l d be u s ed as th e p rogram rep
res entation in a genome. C ramer was ins p ired by S mith 's cross
ov er op erator and p u bl is h ed th e f irs t meth od u s ing tree s tru ctu res
and s u btree cros s ov er in th e ev ol u tionary p roces s . O th er innov a
tiv e imp l ementations followed ev ol v ing p rograms in LI S P or PRO
LO G with s imil ar meth od s for p articu l ar p robl ems [Hickl in, 1986]
[Fu jiki and Dickins on, 1987] [Dickmanns et al ., 1987].
Koza, h owev er, was th e f irs t to recognize th e imp ortance of th e
meth od and d emons trate its f eas ibil ity for au tomatic p rogramming in
general . I n h is 1989 p ap er, h e p rov id ed ev id ence in th e f orm of s ev eral
p robl ems from f iv e d if f erent areas . I n h is 1992 book [Koza, 1992d ],
wh ich s p arked th e rap id growth of genetic p rogramming, h e wrote:
I n p articu l ar, I d es cribe a s ingl e, u nif ied , d omain-ind ep end ent ap
p roach to th e p robl em of p rogram ind u ction - namel y, genetic
p rogramming. I d emons trate, by examp l e and anal ogy, th at ge
netic p rogramming is ap p l icabl e and ef f ectiv e for a wid e v ariety
of p robl ems f rom a s u rp ris ing v ariety of f iel d s . I t wou l d p roba
bl y be imp os s ibl e to s ol v e mos t of th es e p robl ems with any one
exis ting p arad igm for mach ine l earning, artif icial intel l igence, self-
imp rov ing s ys tems , s el f -organizing s ys tems , neu ral networks , or
ind u ction. Noneth el es s , a s ingl e ap p roach wil l be u s ed h ere - re
gard l es s of wh eth er th e p robl em inv ol v es op timal control , p lan
ning, d is cov ery of game-p l aying s trategies , s ymbol ic regres s ion,
au tomatic p rogramming, or ev ol v ing emergent beh av ior.
J. KO ZA , 1992
4.4 Summary of Evolutionary Algorithms
| Year
1958
1959
1965
1965
1975
1978
1980
1985
1986
1987
1987
1992
I nv entor
Fried berg
S amu el
Fogel . O wens and Wal s h
Rech enberg, S ch wefel
Hol l and
Hol l and and Reitmann
S mith
C ramer
Hickl in
Fu jiki and Dickins on
Dickmanns , S ch mid h u ber
and Winkl h of er
Koza
Tech niqu e
l earning mach ine
math ematics
ev ol u tionary p rogramming
ev ol u tionary s trategies
genetic al gorith ms
genetic cl as s if ier s ys tems
earl y genetic p rogramming
earl y genetic p rogramming
earl y genetic p rogramming
earl y genetic p rogramming
earl y genetic p rogramming
genetic p rogramming
I nd iv id u al |
v irtu al as s embl er
p ol ynomial
au tomaton
real -nu mbered v ector
f ixed -s ize bit s tring
ru l es
v ar-s ize bit s tring
tree
LI S P
LI S P
as s embl er
tree
Table 4. 1
Phytogeny of genetic
programming
GP h as many p red eces s ors , and abov e we h av e l ooked at th e mos t
inf l u ential ones . Tabl e 4.1 s u mmarizes th e h is tory th at l ed u p to th e
p res ent s itu ation. Tod ay th ere exis ts a l arge s et of d if f erent genetic
p rogramming tech niqu es wh ich can be cl as s if ied by many criteria,
s u ch as abs tracting mech anis ms , u s e of memory, genetic op erators
emp l oyed , and more [Langd on and Qu res h i, 1995].
I n th e f ol l owing ch ap ters we will take a cl os er l ook at th e com
mones t GP al gorith m, Koza's tree-bas ed s ys tem, bu t wil l al s o l ook
into GP's many v ariants in exis tence tod ay, each of th em with its
own s p ecif ic benef its and d rawbacks .
Exercises
1. Wh ich ev ol u tionary al gorith ms oth er th an GP exis t? Wh at was
th eir res p ectiv e original ap p l ication area?
2. Wh ich ev ol u tionary al gorith m u s es onl y mu tation?
3. Giv e a bas ic examp l e of a mu tation op erator in E S .
4. Des cribe th e rep res entation of a GA .
5. Wh at is f itnes s -p rop ortional s el ection?
6. Wh at is a s ch ema, and wh at d oes th e s ch ema th eorem s tate?
7. Wh at is a cl as s if ier s ys tem? Wh ich are its main comp onents ?
8. E xp l ain s el f -ad ap tation of p arameters in E A s . Wh at d oes it
h av e to d o with th e map p ing between genotyp es and p h eno-
typ es ?
9. Wh at is ep is tas is ?
10. Wh at wou l d you cons id er to be th e main d if f erences between
GP and oth er E A s ?
Further Reading
T. Back,
E VO LUTI O NA RY A LGO RI THMS IN THE O RY A ND PRA C TI C E .
O xf ord Univ ers ity Pres s , New York, NY, 1996.
D. Fogel ,
E VO LUTI O NA RY C O MPUTA TI O N.
I E E E Pres s , New York, 1995.
L. Fogel , A . O wens , and M. Wal s h ,
A RTI FI C I A L I NTE LLI GE NC E THRO UGH S I MULA TE D E VO LUTI O N.
Joh n Wil ey, New York, NY, 1966.
D. Gol d berg,
GE NE TI C A LGO RI THMS IN S E A RC H, O PTI MI ZA TI O N
f e MA C HI NE LE A RNI NG.
A d d is on-Wes l ey Pu bl is h ing C omp any, I nc., Read ing, MA , 1989.
J. Hol l and ,
A DA PTA TI O N I N NA TURA L A ND A RTI FI C I A L S YS TE MS .
Th e Univ ers ity of Mich igan Pres s , A nn A rbor, MI , 1975.
New E d ition 1992.
M. Mitch el l ,
A N I NTRO DUC TI O N TO GE NE TI C A LGO RI THMS .
MI T Pres s , C ambrid ge, MA , 1996.
I . Rech enberg,
E VO LUTI O NS S TRA TE GI E N.
Hol tzmann-Froboog, S tu ttgart, Germany, 1975.
New E d ition 1994.
H.-P. S ch wef el ,
NUME RI C A L O PTI MI ZA TI O N O F C O MPUTE R MO DE LS .
Joh n Wil ey & S ons , C h ich es ter, UK, 1981.
New E d ition 1995.
Part I I
Genetic Programming
Fundamentals
5 Basic Concepts The
Foundation
C ontents
5.1 Terminals and Functions - The Primitives
of Genetic Programs 109
5.1.1 The Terminal Set 109
5.1.2 The Function Set 110
5.1.3 Choosing the Function and Terminal Set Ill
5.2 Executable Program Structures 112
5.2.1 Tree Structure Execution and Memory 113
5.2.2 Linear Structure Execution and Memory 114
5.2.3 Graph Structure Execution and Memory 116
5.2.4 Structure as Convention 117
5.3 Initializing a GP Population 118
5.3.1 Initializing Tree Structures 118
5.3.2 The Ramped Half-and-Half Method 119
5.3.3 Initializing GP Linear Structures 120
5.4 Genetic Operators 122
5.4.1 Crossover 122
5.4.2 Mutation 125
5.4.3 Reproduction 126
5.5 Fitness and Selection 126
5.5.1 The Fitness Function 126
5.5.2 The Selection Algorithm 129
5.6 The Basic GP Algorithm 133
5.7 An Example Run 135
Bu t Natu ral S el ection, as we s h al l h ereaf ter s ee, is a p ower inces
s antl y read y for action, and is as immeas u rabl y s u p erior to man's
feeble ef f orts as th e works of Natu re are to th os e of A rt.
C . DA RWI N, 1859
I n th e s h ort time s ince th e p u bl ication of Koza's 1992 book, ov er eigh t
h u nd red GP p ap ers h av e been p u bl is h ed . Res earch ers h av e d ev is ed
many d if f erent s ys tems th at may f airl y be cal l ed genetic p rogramming
- s ys tems th at u s e tree, l inear, and grap h genomes ; s ys tems th at u s e
h igh cros s ov er rates ; and s ys tems th at u s e h igh mu tation rates . S ome
ev en bl end genetic p rogramming with l inear regres s ion or context free
grammars wh il e oth ers u s e GP to mod el ontogeny, th e d ev el op ment
of a s ingl e cel l into an organis m.
Th e p u rp os e of th is ch ap ter is to boil th is d iv ers ity d own to th e
es s ential common th emes . Th e imp ortant f eatu res s h ared by mos t
GP s ys tems are:
G Stochastic decision making. GP u s es p s eu d o-rand om num
bers to mimic th e rand omnes s of natu ral ev ol u tion. A s a res u l t,
GP u s es s toch as tic p roces s es and p robabil is tic d ecis ion mak
ing at s ev eral s tages of p rogram d ev el op ment. Th e s u bjects of
rand omnes s , p robabil ity, and rand om nu mber generation were
d is cu s s ed in C h ap ter 3 and we u s e th em h ere.
Q Program structures. GP as s embl es v ariabl e l ength p rogram
s tru ctu res from bas ic u nits cal l ed fun ction s and termin als. Func
tions p erf orm op erations on th eir inp u ts , wh ich are eith er ter
minal s or ou tp u t from oth er f u nctions . Th e actu al as s embl y of
th e p rograms from f u nctions and terminal s occu rs at th e begin
ning of a ru n, wh en th e p op u l ation is initial ized .
G Genetic operators. GP trans f orms th e initial p rograms in
th e p op u l ation u s ing genetic op erators . C ros s ov er between two
ind iv id u al p rograms is one p rincip al genetic op erator in GP.
O th er imp ortant op erators are mu tation and rep rod u ction. Spe
cific d etail s and more exotic op erators wil l be d is cu s s ed in C h ap
ters 6, 9, and 10.
G Simulated evolution of a population by means of fitness-
based selection. GP ev ol v es a p op u l ation of p rograms in par
al l el . Th e d riv ing force of th is s imu l ated ev ol u tion is s ome f orm
of fitn ess-based selection . Fitnes s -bas ed s el ection d etermines
wh ich p rograms are s el ected for f u rth er imp rov ements .
This ch ap ter wil l l ook at th es e common th emes at s ome l ength ,
both th eoretical l y and p ractical l y. By th e end of th e ch ap ter, th e
read er s h ou l d h av e a good id ea of h ow a typ ical GP ru n works .
5.1 Terminals and Functions - The Primitives
of Genetic Programs
Th e f u nctions and terminal s are th e p rimitiv es with wh ich a pro
gram in genetic p rogramming is bu il t. Fu nctions and terminal s p l ay
d if f erent rol es . Loos el y s p eaking, terminal s provide a v al u e to th e
s ys tem wh il e f u nctions process a v al u e al read y in th e s ys tem. To
geth er, f u nctions and terminal s are ref erred to as n odes. A l th ou gh
th is terminol ogy s tems from th e tree rep res entation of p rograms , its
u s e h as s p read to l inear and grap h s tru ctu res as wel l .
5.1.1 The Terminal Set
Definition 5.1 The terminal set is comprised of the in puts to the
GP program, the con stan ts supplied to the GP program, an d the zero-
argumen t fun ction s with side-effects executed by the GP program.
I t is u s ef u l to th ink for ju s t a moment abou t th e u s e of th e word
termin al in th is context. I np u t, cons tant and oth er zero-argu ment
nod es are cal l ed terminal s or leaf s becau s e th ey terminate a branch
of a tree in tree-bas ed GP. I n f act, a terminal l ies at th e end of ev ery
branch in a tree-s tru ctu red genome. Th e reas on is s traigh tf orward .
Terminal s are inp u ts to th e p rogram, cons tants or f u nction with ou t
argu ment. I n eith er cas e, a terminal retu rns an actu al nu meric v al u e
with ou t, its elf , h av ing to take an inp u t. A noth er way of p u tting th is
is th at terminal nod es h av e an arity of zero.
Definition 5.2 The arity of a fun ction is the n umber of in puts to
or argumen ts of that fun ction .
Th e terminal s et is comp ris ed , in p art, of inp u ts . C h ap ter 1
s p oke at l ength abou t th e l earning d omain and th e p roces s of select
ing f eatu res (inp u ts ) from th e l earning d omain with wh ich to cond u ct
l earning. Recal l th at th e s el ected f eatu res (inp u ts ) became th e train
ing s et - th at is , th e d ata u p on wh ich th e s ys tem l earns . Viewed
th is way, GP is no d if f erent from any oth er mach ine l earning sys
tem. Wh en we h av e d ecid ed on a s et of f eatu res (inp u ts ), each of
th es e inp u ts becomes p art of th e GP training and tes t s ets as a GP
terminal .
Genetic p rogramming is qu ite d if f erent from oth er mach ine learn
ing s ys tems in h ow it rep res ents th e f eatu res (inp u ts ). E ach f eatu re
(inp u t) in th e training s et becomes p art of th e terminal s et in a GP
s ys tem. Th u s , th e f eatu res of th e l earning d omain are ju s t one of th e
Primitiv es GP u s es to bu il d p rogram s tru ctu res . Th e f eatu res are not
Constants as Terminals
rep res ented in any f ixed way or in any p articu l ar p l ace. I n f act, th e
GP s ys tem can ignore an inp u t al togeth er.
Th e terminal s et al s o incl u d es cons tants . I n typ ical tree-bas ed
GP, a s et of real -nu mbered cons tants is ch os en for th e entire p op u la
tion at th e beginning of th e ru n. Th es e cons tants d o not ch ange th eir
v al u e d u ring th e ru n. Th ey are cal l ed ran dom ephemeral con stan ts,
f requ entl y rep res ented by th e s ymbol 5R. O th er cons tants may be con
s tru cted with in p rograms by combining rand om ep h emeral cons tants
u s ing arith metic f u nctions .
By way of contras t, in l inear GP s ys tems , th e cons tant p ortion
of th e terminal s et is comp ris ed of nu mbers ch os en rand oml y ou t of
a range of integers or real s . I n th es e s ys tems , th e cons tants may
be mu tated ju s t l ike any oth er p art of th e p rogram. Th u s , l inear
cons tants can ch ange, u nl ike typ ical tree s ys tem rand om ep h emeral
cons tants .
Function Set
The Range of Available
Functions
5.1.2 The Function Set
Definition 5.3 The function set is composed of the statemen ts,
operators, an d fun ction s available to the GP system.
Th e f u nction s et may be ap p l ication-s p ecif ic and be s el ected to f it
th e p robl em d omain. Th e range of av ail abl e f u nctions is v ery broad .
Th is is , af ter al l , genetic programmin g. I t may u s e any p rogram
ming cons tru ct th at is av ail abl e in any p rogramming l angu age. S ome
examp l es follow:
Q Boolean Functions
For examp l e: A ND, O R, NO T, XO R.
U Arithmetic Functions
For examp l e: PLUS , MI NUS , MULTI PLY, DI VI DE .
Q Transcendental Functions
For examp l e: TRI GO NO ME TRI C and LO GA RI THMI C FUNC TI O NS .
Q Variable Assignment Functions
Let a be a v ariabl e av ail abl e to th e GP s ys tem, a := 1 wou l d
be a v ariabl e's as s ignment f u nction in a regis ter mach ine cod e
ap p roach . Th e s ame f u nction wou l d ap p ear in a tree-bas ed
s ys tem with an S -exp res s ion th at l ooked s ometh ing l ike th is :
( ASSIGN a 1 )
wh ere 1 is an inp u t to th e ASSIGN nod e. O f cou rs e, th ere wou l d
h av e to be a corres p ond ing READ nod e, wh ich wou l d read wh at
ev er v al u e was s tored in a and p as s it al ong as th e ou tp u t of
th e READ nod e.
Q Indexed Memory Functions
S ome GP s ys tems u s e ind exed memory, i.e., acces s to memory
cel l s v ia an ind ex. C h ap ter 11 wil l p rov id e d etail s . Bu t note
th at it is s traigh tf orward to manip u l ate ind exed memory in GP.
Q Conditional Statements
For examp l e: I F, THEN, E LS E ; CASE or SWITCH s tatements .
Q Control Transfer Statements
For examp l e: GO TO , C A LL, JUMP.
Q Loop Statements
For examp l e: WHILE . . . DO , RE PE A T . . . UNTI L, FO R . . . DO .
Q Subroutines
Th e range of f u nctions is cons id erabl y broad er th an th e pre
ced ing l is t. A ny f u nction th at a p rogrammer can d ream u p
may become a p art of th e f u nction s et in GP. For examp l e,
in a robotics ap p l ication, p rimitiv es cou l d be created by th e
p rogrammer th at were s p ecif ic to th e p robl em, s u ch as read
s ens or, t u rn l ef t , t u rn ri gh t , and move ah ead . E ach of
th os e p rimitiv es wou l d become p art of th e f u nction s et or of
th e terminal s et, if its arity were 0. Th e f reed om to ch oos e th e
f u nction s et in GP of ten red u ces th e need for p re- and p os tp ro
ces s ing.
5.1.3 Choosing the Function and Terminal Set
Th e f u nctions and terminal s u s ed for a GP ru n s h ou l d be p owerf u l
enou gh to be abl e to rep res ent a s ol u tion to th e p robl em. For ex
amp l e, a f u nction s et cons is ting onl y of th e ad d ition op erator wil l
p robabl y not s ol v e many v ery interes ting p robl ems . O n th e oth er
h and , it is better not to u s e too l arge a f u nction s et. Th is enl arges
th e s earch s p ace and can s ometimes make th e s earch for a s ol u tion
h ard er. A n ap p roximate s tarting p oint for a f u nction s et migh t be
th e arith metic and l ogic op erations :
PLUS , MINUS, TIMES , DIVIDE , OR, AND, XOR.
Th e range of p robl ems th at can be s ol v ed with th es e f u nctions is
as tonis h ing. Good s ol u tions u s ing onl y th is f u nction s et h av e been
obtained on s ev eral d if f erent cl as s if ication p robl ems , robotics control
p robl ems , and s ymbol ic regres s ion p robl ems . Th is s et of p rimitiv es
d oes not ev en incl u d e f orward or backward cond itional ju mp s ! I n
concl u s ion: A p ars imoniou s ap p roach to ch oos ing a f u nction s et is
of ten wis e.
Sufficiency and
Parsimony
Choosing the Constants
Closure of the Function
and Terminal Set
Some Practical Advice
A s imil ar p ars imoniou s ap p roach is al s o ef f ectiv e in ch oos ing th e
cons tants . For examp l e, many imp l ementations u s e 256 nod es for
encod ing f u nctions and terminal s . If th ere are 56 nod e l abel s u s ed for
f u nctions th at l eav es a maximu m of 200 nod es for cons tants . I n many
cas es , th is nu mber of cons tants h as p rov en to be abl e to s ol v e d if f icu lt
p robl ems . GP h as a remarkabl e abil ity to combine th e cons tants at its
d is p os al into new cons tants . I t is not neces s ary, th eref ore, to incl u d e
al l cons tants th at may be need ed .
A noth er imp ortant p rop erty of th e f u nction s et is th at each func
tion s h ou l d be abl e to h and l e gracef u l l y al l v al u es it migh t receiv e
as inp u t. Th is is cal l ed th e closure p rop erty. Th e mos t common
examp l e of a f u nction th at d oes not fu lfill th e cl os u re p rop erty is
th e d iv is ion op erator. Th e d iv is ion op erator cannot accep t zero as
an inp u t. Div is ion by zero wil l normal l y cras h th e s ys tem, th ereby
terminating a GP ru n. Th is is of cou rs e u naccep tabl e. I ns tead of
a s tand ard d iv is ion op erator one may d ef ine a new f u nction cal l ed
p rotected d iv is ion. Protected d iv is ion is ju s t l ike normal d iv is ion ex
cep t for zero d enominator inp u ts . I n th at cas e, th e f u nction retu rns
s ometh ing el s e, i.e., a v ery big nu mber or zero.
1
A l l f u nctions (s qu are
root and l ogarith ms are oth er examp l es ) mu s t be abl e to accep t al l
p os s ibl e inp u ts becau s e if th ere is any way to cras h th e s ys tem, th e
boil ing genetic s ou p wil l certainl y h it u p on it.
O ne f inal p iece of p ractical ad v ice abou t th e f u nction and termi
nal s et migh t be h el p f u l . A t th e beginning of a p roject, one s h ou l d
not s p end too mu ch time d es igning s p ecif ic f u nctions and terminal s
th at s eem p erf ectl y attu ned to th e p robl em. Th e exp erience of th e
au th ors is th at GP is very creativ e at taking s imp l e f u nctions and
creating wh at it need s by combining th em. I n f act, GP of ten ignores
th e more s op h is ticated f u nctions in f av or of th e p rimitiv es d u ring
ev ol u tion. S h ou l d it tu rn ou t th at th e s imp l er s et of f u nctions and
terminal s is not working well enou gh , th en it is time to begin craf ting
v ou r terminal s and f u nctions .
5.2 Executable Program Structures
Th e p rimitiv es of GP - th e f u nctions and terminal s - are not pro
grams . Fu nctions and terminal s mu s t be as s embl ed into a structure
bef ore th ey may execu te as p rograms . Th e ev ol u tion of p rograms is ,
of cou rs e, common to al l genetic p rogramming. Programs are s tru c
tu res of f u nctions and terminal s togeth er with ru l es or conv entions
for wh en and h ow each f u nction or terminal is to be execu ted .
If one works with certain f l oating p oint ins tru ction s ets , manu f actu rers
h av e s ometimes al read y bu il t in th e p rotection.
Th e ch oice of a p rogram s tru ctu re in GP affects execu tion ord er,
u s e and l ocal ity of memory, and th e ap p l ication of genetic op erators
to th e p rogram. Th ere are real l y two v ery s ep arate s ets of is s u es
h ere. E xecu tion and memory l ocal ity are p h enomic is s u es - th at is ,
is s u es regard ing th e behavior of th e p rogram. O n th e oth er h and ,
mu tation and cros s ov er are genomic is s u es - th at is , h ow th e "DNA "
of th e p rogram is al tered . I n mos t tree-bas ed GP s ys tems , th ere is no
s ep arate p h enotyp e. Th eref ore, it ap p ears th at s tru ctu ral is s u es of
execu tion, memory, and v ariation are th e s ame. Bu t th at s imil arity
exis ts onl y becau s e of an imp l icit ch oice to bl end th e genome and th e
p h enome. C h ap ters 9 and 12 s h al l treat oth er ap p roach es in d etail .
Th e th ree p rincip al p rogram s tru ctu res u s ed in GP are tree, lin
ear, and grap h s tru ctu res . Howev er, GP p rogram s tru ctu res are of ten
virtual structures. For examp l e, tree and grap h s tru ctu res are exe
cu ted and al tered as i/th ey were trees or grap h s . Bu t h ow a p rogram
execu tes or is v aried is a comp l etel y d if f erent qu es tion from h ow it
is actu al l y h el d in comp u ter memory. Many tree-bas ed s ys tems d o
not actu al l y h ol d anyth ing th at l ooks like a tree in th e comp u ter
(s ee C h ap ter 11). Here, we wil l examine th e manner in wh ich th e
virtual p rogram beh av es . O f th e th ree f u nd amental s tru ctu res , tree
s tru ctu res are th e commones t in GP. Beginning with trees , we s h al l
d es cribe al l th ree in s ome d etail now.
5.2.1 Tree Structure Execution and Memory
Figu re 5.1 is a d iagram of a tree-bas ed p h enome.
2
I t h as many dif
f erent s ymbol s th at cou l d be execu ted in any ord er. Bu t th ere is a
conv ention for execu ting tree s tru ctu res .
Th e s tand ard conv ention for tree execu tion is th at it p roceed s by
rep eated l y ev al u ating th e l ef tmos t nod e for wh ich al l inp u ts are avail
abl e. Th is ord er of execu tion is ref erred to as p os tf ix ord er becau s e
th e op erators ap p ear af ter th e op erand s . A noth er conv ention for exe
cu tion is cal l ed p ref ix ord er. I t is th e p recis e op p os ite of p os tf ix ord er
and execu tes th e nod es clos e to th e root of th e tree bef ore it execu tes
th e terminal nod es . Th e ad v antage of p ref ix ord ering is th at a tree
containing nod es like IF/THEN branch es can of ten s av e execu tion time
by ev al u ating f irs t wh eth er th e THEN tree mu s t be ev al u ated . A p p ly
ing p os tf ix ord er to Figu re 5.1, th e execu tion ord er of th e nod es is : d
- >e- >O R-
a
- >- b- ) - c- >- + - x - >- - .
Th is s ame tree s tru ctu re al s o cons trains th e u s age of memory on
execu tion. Figu re 5.1 u s es onl y local memory d u ring execu tion. Wh y?
2
Wh en u s ing arith metic op erators we s h al l v ariou s l y u s e mu l , MUL, x, *
to mean mu l tip l ication.
Figure 5.1
A tree structure phenome
Local memory is bu il t into th e tree s tru ctu re its el f . For examp l e, th e
v al u es of b and c are l ocal to th e + nod e. Th e v al u es of b and c
are not av ail abl e to any oth er p art of th e tree d u ring execu tion. Th e
s ame is tru e for ev ery v al u e in th e tree.
5.2.2 Linear Structure Execution and Memory
A l inear p h enome is s imp l y a ch ain of ins tru ctions th at execu te from
lef t to righ t or - d ep end ing on h ow th e p ictu re is d rawn - f rom top
to bottom. Th e p articu l ar examp l e of a l inear genome d is cu s s ed h ere
is a mach ine cod e genome of ou r A I MGP (for "A u tomatic I nd u ction
of Mach ine C od e with Genetic Programming") s ys tem.
3
Figu re 5.2
s h ows s u ch a l inear p h enome in op eration.
Th e l inear p rogram in Figu re 5.2 is id entical in f u nction to th e
tree p rogram in Figu re 5.1. Bu t u nl ike a tree s tru ctu re, th e l inear
p h enome h as no obv iou s way for a f u nction to get its inp u ts . For
examp l e, a nod e in a l inear p h enome th at contained ju s t a + f u nction
wou l d be a p l u s with noth ing to ad d togeth er. Wh at is mis s ing h ere
is memory - a p l ace to h ol d th e inp u ts to th e + and oth er f u nctions .
Th ere are many ways to giv e memory to th e ins tru ctions , bu t th e
mos t p rominent in GP is to make th e genome a two- or th ree-ad d res s
[Nord in, 1994] [Banzh af and Fried rich , 1994] [Hu el s bergen, 1996] reg
is ter mach ine. A regis ter mach ine u s es a l inear s tring of ins tru ctions
op erating on a s mal l nu mber of memory regis ters . Th e ins tru ctions
read and write v al u es f rom and to th e regis ters . Th e reas on a reg-
3
A I MGP was f ormerl y known as C omp il ing Genetic Programming Sys
tem (C GPS ). . -
Figure 5.2
AIMGP type linear
phenome and five CPU
registers. The registers
are shown as holding
integer values.
is ter mach ine is an excel l ent way to imp l ement l inear p h enomes is
th at ev ery commercial comp u ter in exis tence contains a C PU th at
h as memory regis ters op erated u p on by l inear s trings of ins tru ctions .
A regis ter mach ine rep res ents th e mos t bas ic workings of a C PU
execu ting mach ine cod e ins tru ctions . S ince we are d oing genetic pro
gramming, it makes s ens e to try to u s e a s ys tem th at makes d irect
use of th e bas ic op eration of th e comp u ter.
I n Figu re 5.2 th e f irs t ins tru ction is b=b+c. Th e effect of th is
ins tru ction is to ad d th e v al u es in regis ters b and c togeth er and to
p lace th e s u m in regis ter b.
Th e l inear p rogram begins execu tion at th e top ins tru ction and
p roceed s d own th e ins tru ction l is t, one at a time. Th e onl y excep tion
to th is ru l e is if th e p rogram incl u d es ju mp ins tru ctions . Th en th e
execu tion ord er becomes v ery f l exibl e. A t th e end of th e execu tion,
th e res u l t is h el d in regis ter a.
Th ere is one oth er big d if f erence between th e l inear and th e tree
ap p roach . Th e memory in th e tree s ys tem is , as we s aid , l ocal . Bu t
in a regis ter mach ine, any of th e ins tru ctions may acces s any of th e
regis ter v al u es . S o th e v al u es of b and c, wh ich , as we s aw abov e, are
local v al u es in a tree s tru ctu re, may be acces s ed by any ins tru ction.
Th eref ore, regis ters contain global memory v al u es .
5.2.3 Graph Structure Execution and Memory
O f th e f u nd amental p rogram s tru ctu res , grap h s are th e newes t arriv al .
PA DO [Teller and Vel os o, 1995b] is th e name of th e grap h -bas ed GP
s ys tem we s h al l d is cu s s h ere. C u riou s l y enou gh , th e name PA DO
d oes not h av e anyth ing to d o with th e f act th at grap h s are u s ed for
ev ol u tion. Grap h s are cap abl e of rep res enting v ery comp l ex p rogram
s tru ctu res comp actl y. A grap h s tru ctu re is no more th an nod es con
nected by ed ges . O ne may th ink of an ed ge as a p ointer between two
nod es ind icating th e d irection of th e f l ow of p rogram control .
4
PA DO d oes not ju s t p ermit l oop s and recu rs ion - it p os itiv el y
embraces th em. Th is is not a triv ial p oint; oth er GP s ys tems h av e
exp erimented with l oop s and recu rs ion onl y gingerl y becau s e of th e
great d if f icu l ties th ey cau s e.
Figure 5.3
A small PADO program
Figu re 5.3 is a d iagram of a s mal l PA DO p rogram. Th ere are
two s p ecial bu t s el f -exp l anatory nod es in ev ery p rogram. E xecu tion
begins at th e S tart nod e. Wh en th e s ys tem h its th e E nd nod e or an
oth er p res et cond ition, execu tion is ov er. Th u s , th e f l ow of execu tion
4
I t is well known th at tree and l inear genomes are al s o grap h s . Th at is ,
both h av e ed ges and nod es . Bu t trees and l inear genomes are grap h s with
v ery p articu l ar cons traints for th e ed ges .
is d etermined by th e ed ges in th e grap h . More wil l be s aid abou t
th at l ater.
Like al l GP s ys tems , PA DO need s memory to giv e its nod es th e
d ata u p on wh ich to op erate. Here, d ata is trans f erred among nod es
by means of a s tack. E ach of th e nod es execu tes a f u nction th at
read s from and /or writes to th e s tack. For examp l e, th e nod e A in
Figu re 5.3 read s th e v al u e of th e inp u t A from RA M and p u s h es it
onto th e s tack. Th e nod e 6 p u s h es th e v al u e 6 onto th e s tack. Th e
nod e x p op s two v al u es f rom th e s tack, mu l tip l ies th em, and p u s h es
th e res u l t onto th e s tack. Th u s , th e s ys tem h as l ocal ized memory.
Th e p roces s may be f ou nd in more d etail in C h ap ter 11.
Data may al s o be s av ed by PA DO in ind exed memory. Th e nod e
labeled Write p op s two argu ments f rom th e s tack. I t writes th e v al u e
of th e f irs t argu ment into th e ind exed memory l ocation ind icated
by th e s econd argu ment. Th e Read nod e p erf orms mu ch th e s ame
fu nction in rev ers e. Th e ind exed memory is gl obal memory.
Th ere are two th ings each nod e in th e grap h mu s t d o:
1. I t mu s t p erf orm s ome f u nction on th e s tack and /or th e ind exed
memory; and
2. I t mu s t d ecid e wh ich nod e wil l be th e n ext nod e to execu te.
Th is l atter rol e is wh at d etermines p rogram execu tion ord er in a
grap h . Th e p rogram its el f d etermines ord er of execu tion by ch oos ing
between th e ou tgoing ed ges f rom th e nod e each time a nod e is exe
cu ted . C ons id er Figu re 5.3 again. Th e x nod e may trans f er control
to th e Write nod e, th e Read nod e or th e 4 nod e. Th e s ys tem h as a
d ecision logic wh ich tes ts a memory or s tack v al u e and , bas ed u p on
th at v al u e, ch oos es th e next nod e.
5.2.4 Structure as Convention
On th e p h enomic l ev el , p rogram s tru ctu re in a v irtu al tree is ju s t a
conv ention for ord ering execu tion of th e nod es and for l ocal izing or
globalizing memory. C onv entions may be ch anged as l ong as th ey are
recognized as conv entions . Th is is a great area of p otential f l exibil ity
of genetic p rogramming.
Th is is s u e is qu ite d if f erent with th e regis ter mach ine s ys tem dis
cussed abov e. Th at s ys tem ev ol v es actu al mach ine cod e - th e pro
gram s tru ctu re is not v irtu al , nor are th e conv entions regard ing ord er
of execu tion. Th e p h enomic s tru ctu re and th e execu tion ord er are
d ictated by th e C PU. Th e regis ter mach ine s ys tem is much f as ter
th an tree or grap h s ys tems . Bu t to get th at extra s p eed , it s acrif ices
Stack Memory in
PADO
PADO Indexed Memory
th e abil ity to exp eriment with ch anges in th e conv entions regard ing
ord er of execu tion.
5
Th e is s u e is al s o res ol v ed qu ite d if f erentl y by th e PA DO s ys tem.
I t h as d is card ed trad itional GP ord er of execu tion conv entions . Th ere
is no tree or l inear s tru ctu re at al l s aying "go h ere next and d o th is ."
A PA DO p rogram ev olv es its own execu tion ord er. Th is is anoth er
examp l e of th e f reed om of rep res entation af f ord ed by GP.
5.3 Initializing a GP Population
Th e f irs t s tep in actu al l y p erf orming a GP ru n is to initial ize th e
p op u l ation. Th at means creating a v ariety of p rogram s tru ctu res for
l ater ev ol u tion. Th e p roces s is s omewh at d if f erent for th e th ree typ es
of genomes u nd er cons id eration.
Maximum Program O ne of th e p rincip al p arameters of a GP ru n is th e maximu m
Size s ize p ermitted for a p rogram. For trees in GP, th at p arameter is
exp res s ed as th e maximu m d ep th of a tree or th e maximu m total
nu mber of nod es in th e tree.
Depth Definition 5.4 The depth of a n ode is the min imal n umber of
n odes that must be traversed to get from the root n ode of the tree to
the selected n ode.
Th e maximu m d ep th p arameter (MDP) is th e l arges t d ep th th at
wil l be p ermitted between th e root nod e and th e ou termos t terminal s
j in an ind iv id u al . For th e commones t nod es of arity 2, th e s ize of
th e tree h as a maximu m nu mber of 2
MDP
nod es . For l inear GP,
th e p arameter is cal l ed maximu m l ength and it s imp l y means th e
maximu m nu mber of ins tru ctions p ermitted in a p rogram. For grap h
GP, th e maximu m nu mber of nod es is ef f ectiv ely equ iv al ent to th e
s ize of th e p rogram.
6
. , , ^. v: -f ?
5. 3. 1 Initializing Tree Structures
Th e initial ization of a tree s tru ctu re is f airl y s traigh tf orward . Recall
th at trees are bu il t from bas ic u nits cal l ed f u nctions and terminal s .
We s h al l as s u me, now, th at th e terminal s and f u nctions al l owabl e in
th e p rogram trees h av e been s el ected al read y:
T={a,b,c,d,e] (5.1)
5
Th is s ys tem can ev ol v e ord er of execu tion bu t not by ch anging h igh -
l ev el conv entions regard ing ord er of execu tion. I t mu s t d o s o by incl u d ing
l ow-l ev el branch ing or ju mp ins tru ctions [Nord in and Banzh af , 1995b],
6
For comp aris on p u rp os es it migh t be better to u s e th e maximu m num
ber of nod es in a tree as th e s ize p arameter.
P {->- v %1 (^9^
J. I 1~ 5 5 1 ' 0 f \ /
Th ere are two d if f erent meth od s for initial izing tree s tru ctu res in
common u s e. Th ey are cal l ed full and grow [Koza, 1992d ].
Figu re 5.4 s h ows a tree th at h as been initial ized u s ing th e grow
meth od with a maximu m d ep th of f ou r. Grow p rod u ces trees of ir
regu lar s h ap e becau s e nod es are s el ected rand oml y f rom th e f u nction
an d th e terminal s et th rou gh ou t th e entire tree (excep t th e root nod e,
which u s es onl y th e f u nction s et). O nce a branch contains a terminal
nod e, th at branch h as end ed , ev en if th e maximu m d ep th h as not
been reach ed .
The Grow Method
Figure 5.4
Tree of maximum depth
four initialized with grow
method
I n Figu re 5.4, th e branch th at end s with th e inp u t d h as a d ep th
of only th ree. Becau s e th e incid ence of ch oos ing terminal s is rand om
th rou gh ou t initial ization, trees initial ized u s ing grow are l ikel y to be
irregu lar in s h ap e.
I ns tead of s el ecting nod es rand oml y f rom th e f u nction an d th e
terminal s et, th e f u ll meth od ch oos es on ly f u nctions u ntil a nod e is
at th e maximu m d ep th . Th en it ch oos es onl y terminal s . Th e res u l t
is th at ev ery branch of th e tree goes to th e fu ll maximu m d ep th .
Th e tree in Figu re 5.5 h as been initial ized with th e fu ll meth od
with a maximu m d ep th of th ree.
If th e nu mber of nod es is u s ed as a s ize meas u re, growth s top s
when th e tree h as reach ed th e p res et s ize p arameter.
5.3.2 The Ramped Half-and-Half Method
Div ers ity is v al u abl e in GP p op u l ations . By its el f , th e abov e meth od
cou ld res u l t in a u nif orm s et of s tru ctu res in th e initial p op u l ation
The Full Method
Figure 5.5
Tree of maximum depth
three initialized with full
method
becau s e th e rou tine is th e s ame for al l ind iv id u al s . To p rev ent th is ,
th e "ramp ed -h al f -and -h al f " tech niqu e h as been d ev is ed . I t is in
tend ed to enh ance p op u l ation d iv ers ity of s tru ctu re from th e ou ts et
[Koza, 1992c].
I n trees th e tech niqu e is l ike th is . S u p p os e th e maximu m d ep th
p arameter is 6. Th e p op u l ation is d iv id ed equ al l y among ind iv id u al s
to be initial ized with trees h av ing d ep th s 2, 3, 4, 5, and 6. For each
d ep th grou p , h al f of th e trees are initial ized with th e fu ll tech niqu e
and h al f with th e grow tech niqu e.
5.3.3 Initializing GP Linear Structures
I nitial izing l inear GP s tru ctu res is s omewh at d if f erent th an th e ini
tial ization of tree s tru ctu res . A gain, we s h al l l ook at th e A I MGP
s ys tem for il l u s tration p u rp os es . A I MGP rep res ents p rograms as a
l inear s equ ence of mach ine cod e ins tru ctions th at op erate on C PU
regis ters , as we h av e s een in Figu re 5.2.
Mach ine cod e GP ind iv id u al s h av e f ou r p arts , d es cribed as fol
l ows :
The Header
The Body
The Footer
The Return Instruction
For th e p u rp os e of th is s ection, th e h ead er and th e f ooter may be
regard ed as h ou s ekeep ing s egments th at d o not u nd ergo ev ol u tion.
Th e retu rn ins tru ction is qu ite d if f erent. A l th ou gh it, too, may not
u nd ergo ev ol u tion, it p rov id es th e cru cial p oint, for each p rogram,
where th at p rogram end s . Th is s ection wil l d eal p rimaril y with th e
initial ization of th e bod y of th e GP ind iv id u al .
Figu re 5.6 s h ows th e bas ic s etu p of f ou r regis ters and one A I MGP
ind iv id u al . Th e f ou r C PU regis ters r
0
,ri, r
2
, r^ h av e been s el ected for
u se. Th es e regis ters are th e equ iv al ent of th e terminal s in trees and
migh t h ol d eith er v ariabl es ( r
0
, r i , r
2
) or cons tants (73). Th e range
of cons tants h as to be d enned as wel l . General l y, regis ter TO is ch os en
as th e ou tp u t regis ter. Th is means th at th e v al u e th at ap p ears in
regis ter TQ at th e end of execu tion is th e ou tp u t of th e p rogram.
Figure 5.6
Linear AIMGP genome
operating on CPU
registers. Registers
TO, r i , . . . ,rs are used
here.
E ach nod e in th e bod y of th e p rogram is a mach ine cod e ins tru c
tion. A gain we s h al l as s u me th at th e nu mber and s ort of ins tru ctions
wh ich are th e equ iv al ent of f u nctions in trees h av e been f ixed be
f oreh and . Th e mach ine cod e ins tru ctions in th e s amp l e p rogram of
Figu re 5.6 act on th ree of th e f ou r regis ters . Th e cons tant regis ter r%
is not u s ed in th is examp l e p rogram.
Th e tas k of initial ization in A I MGP now is to ch oos e initial , ran
dom ins tru ctions th at op erate on an ap p rop riate s u bs et of th e C PU's
regis ters . A A I MGP ind iv id u al is initial ized as f ollows :
1. Rand oml y ch oos e a l ength between two and th e maximu m l ength
p arameter;
2. C op y th e p red ef ined h ead er to th e beginning of an ind iv id u al ;
3. I nitial ize and ad d ins tru ctions to th e ind iv id u al u ntil th e num
ber of ins tru ctions ad d ed equ al s th e l ength ch os en in s tep 1.
Th e ins tru ctions are initial ized by rand oml y ch oos ing an in
s tru ction typ e and th en rand oml y f il l ing ou t th e ins tru ction
with ref erences to rand oml y ch os en regis ters from th e regis ter
s et arid /or rand oml y ch os en cons tants from th e cons tant range;
4. C op y th e p red ef ined f ooter to th e end of th e ind iv id u al ;
5. C op y th e p red ef ined retu rn ins tru ction to th e end of th e indi
v id u al .
I n th is way, th e entire p op u l ation can be initial ized . Th e meth od
d es cribed h ere is u s ed ins tead of th e fu ll and grow meth od s in trees .
A n equ iv al ent to th os e meth od s migh t be ap p l ied as wel l .
5.4 Genetic Operators
A n initial ized p op u l ation u s u al l y h as v ery low f itnes s . E v ol u tion pro
ceed s by trans f orming th e initial p op u l ation by th e u s e of genetic
op erators . I n mach ine l earning terms , th es e are th e s earch op erators .
Wh il e th ere are many genetic op erators , s ome of wh ich wil l ap p ear
in C h ap ter 10, th e th ree p rincip al GP genetic op erators are:
G C ros s ov er;
Q Mu tation; and
Q Rep rod u ction.
Th is s ection wil l giv e an introd u ction to th e th ree bas ic genetic
op erators .
5. 4. 1 Crossover
Th e cros s ov er op erator combines th e genetic material of two p arents
by s wap p ing a p art of one p arent with a p art of th e oth er. O nce
again, tree l inear and grap h cros s ov er wil l be d is cu s s ed s ep aratel y.
Tree-Based Crossover Tree-bas ed cros s ov er is d es cribed grap h ical l y in Figu re 5.7. Th e
p arents are s h own in th e u p p er h al f of th e f igu re wh il e th e ch il d ren
are s h own in th e lower h alf .
More s p ecif ical l y, tree-bas ed cros s ov er p roceed s by th e following
s tep s :
Q C h oos e two ind iv id u al s as p arents , bas ed on mating s election
p ol icy.
7
Th e two p arents are s h own at th e top of Figu re 5.7.
7
Like, e.g., f itnes s -p rop ortional s el ection.
Figure 5.7
Tree-based crossover
Q S elect a rand om s u btree in each p arent. I n Figu re 5.7, th e se
l ected s u btrees are s h own h igh l igh ted with d arker l ines . Th e
s el ection of s u btrees can be bias ed s o th at s u btrees cons titu t
ing terminal s are s el ected with lower p robabil ity th an oth er
s u btrees .
Q S wap th e s el ected s u btrees between th e two p arents . Th e re
s u l ting ind iv id u al s are th e ch il d ren. Th ey are s h own at th e
bottom of Figu re 5.7.
Linear cros s ov er is al s o eas il y d emons trated . I ns tead of s wap p ing
s u btrees , l inear cros s ov er, not s u rp ris ingl y, s wap s l inear s egments of
cod e between two p arents . Linear cros s ov er is s h own grap h ical l y in
Figu re 5.8. Th e p arents are in th e lef t h al f of th e f igu re wh il e th e
ch ild ren are in th e righ t h al f of th e f igu re.
Th e s tep s in l inear cros s ov er are as f ol l ows :
Q C h oos e two ind iv id u al s as p arents , bas ed on mating s el ection
p ol icy.
Linear Crossover
G S el ect a rand om s equ ence of ins tru ctions in each p arent. I n
Figu re 5.8, th e s el ected ins tru ctions are s h own h igh l igh ted with
l igh t gray.
Q S wap th e s el ected s equ ences between th e two p arents . Th e
res u l ting ind iv id u al s are th e ch il d ren. Th ey are s h own at th e
righ t of Figu re 5.8.
Graph Crossover Grap h cros s ov er is s omewh at more comp l icated . Th e following
p roced u re is emp l oyed by Tel l er [Tel l er, 1996]:
LJ C h oos e two ind iv id u al s as p arents , bas ed on mating s el ection
p ol icy.
ij Div id e each grap h into two nod e s ets .
Q Label al l ed ges (p ointers , arcs ) internal if th ey connect
nod es with in a f ragment, l abel th em oth erwis e as external .
Q Label nod es in each f ragment as ou tp u t if th ey are th e
s ou rce of an external ed ge and as inp u t if th ey are th e
d es tination of an external ed ge.
Q S wap th e s el ected f ragments between th e two p arents .
Q Recombine ed ges so th at al l external ed ges in th e f ragments
now bel onging togeth er p oint to rand oml y s el ected inp u t nod es
of th e oth er f ragments .
Figure 5.8
Linear crossover
With th is meth od , al l ed ges are as s u red to h av e connections in
th e new ind iv id u al and v al id grap h s h av e been generated .
Th is brief treatment of cros s ov er d emons trates th e bas ics . More
ad v anced cros s ov er top ics wil l be treated in C h ap ter 6.
5.4.2 Mutation
Mu tation op erates on onl y one ind iv id u al . Normal l y, af ter cros s ov er
h as occu rred , each ch il d p rod u ced by th e cros s ov er u nd ergoes mu ta
tion with a low p robabil ity. Th e p robabil ity of mu tation is a p aram
eter of th e ru n. A s ep arate ap p l ication of cros s ov er and mu tation,
h owev er, is al s o p os s ibl e and p rov id es anoth er reas onabl e p roced u re.
Wh en an ind iv id u al h as been s el ected for mu tation, one typ e of
mu tation op erator in tree GP s el ects a p oint in th e tree rand oml y
and rep l aces th e exis ting s u btree at th at p oint with a new rand oml y
generated s u btree. Th e new rand oml y generated s u btree is created in
th e s ame way, and s u bject to th e s ame l imitations (on d ep th or s ize)
as p rograms in th e initial rand om p op u l ation. Th e al tered ind iv id u al
is th en p l aced back into th e p op u l ation. Th ere are oth er typ es of
mu tation op erators wh ich wil l be d is cu s s ed in C h ap ter 9.
I n l inear GP, mu tation is a bit d if f erent. Wh en an ind iv id u al is
ch osen for mu tation, th e mu tation op erator f irs t s el ects one ins tru c
tion from th at ind iv id u al for mu tation. I t th en makes one or more
ch anges in th at ins tru ction. Th e typ e of ch ange is ch os en rand oml y
from th e f ol l owing l is t:
Q A ny of th e regis ter d es ignations may be ch anged to anoth er
rand oml y ch os en regis ter d es ignation th at is in th e regis ter s et.
Q Th e op erator in th e ins tru ction may be ch anged to anoth er
op erator th at is in th e f u nction s et.
Q A cons tant may be ch anged to anoth er rand oml y ch os en con
s tant in th e d es ignated cons tant range.
S u p p os e th e ins tru ction
ro = ri + r
2
h as been s el ected for mu tation. Here are s amp l es of accep tabl e mu
tations in th is ins tru ction:
n = ri + r
2
fa r-i + r
2
TO = 7"i O R T2
ro = ri + r
0
Many of th e ap p arent d if f erences between tree and l inear mu ta
tion are entirel y h is torical . Tree mu tation can al ter a s ingl e nod e as
Mutation in Tree
Structures
Mutation in Linear
Structures
Tree vs. Linear
Mutation
l inear mu tation al ters a s ingl e ins tru ction. Linear mu tation can re
p l ace al l ins tru ctions th at occu r af ter a rand oml y ch os en ins tru ction
with anoth er rand oml y ch os en s equ ence of ins tru ctions - a p roced u re
s imil ar to rep l acing a s u btree introd u ced abov e. Grap h mu tation is
p os s ibl e as wel l , bu t is not treated h ere.
5.4.3 Reproduction
Th e rep rod u ction op erator is s traigh tf orward . A n ind iv id u al is se
l ected . I t is cop ied , and th e cop y is p l aced into th e p op u l ation. Th ere
are now two v ers ions of th e s ame ind iv id u al in th e p op u l ation.
5.5 Fitness and Selection
A s noted in C h ap ter 1, genetic p rogramming neith er is a h il l climb
ing s ys tem (wh ich s earch es onl y one p ath th rou gh th e s earch s p ace)
nor d oes it cond u ct an exh au s tiv e s earch of th e s p ace of al l p os s ibl e
comp u ter p rograms . Rath er, GP is a typ e of beam s earch . Th e GP
p op u l ation is th e beam - th e col l ection of p oints in th e s earch s p ace
f rom wh ich f u rth er s earch may be cond u cted .
O f cou rs e, GP mu s t ch oos e wh ich members of th e p op u l ation
wil l be s u bject to genetic op erators s u ch as cros s ov er, rep rod u ction,
and mu tation. I n making th at ch oice, GP imp l ements one of th e mos t
imp ortant p arts of its mod el of organic ev ol u tionary l earning, fitn ess-
based selection . Fitnes s -bas ed s el ection af f ects both th e ord ering of
th e ind iv id u al s in th e beam and th e contents of th e beam.
GP's ev al u ation metric is cal l ed a fitn ess fun ction and th e manner
in wh ich th e f itnes s f u nction af f ects th e s el ection of ind iv id u al s for
genetic op erators may be ref erred to as th e GP s el ection al gorith m.
Fitnes s f u nctions are v ery p robl em s p ecif ic. Th ere are a nu mber of
d if f erent s el ection al gorith ms u s ed in GP.
5. 5. 1 The Fitness Function
Definition 5.5 Fitness is the measure used by GP durin g simu
lated evolution of how well a program has learn ed to predict the out-
put(s) from the in put(s) - that is, the features of the learn in g domain .
Th e goal of h av ing a f itnes s ev al u ation is to giv e f eed back to th e
l earning al gorith m regard ing wh ich ind iv id u al s s h ou l d h av e a h igh er
p robabil ity of being al l owed to mu l tip l y and rep rod u ce and wh ich
ind iv id u al s s h ou l d h av e a h igh er p robabil ity of being remov ed from
th e p op u l ation. Th e f itnes s f u nction is cal cu l ated on wh at we h av e
earl ier ref erred to as th e training s et.
Continuous Fitness
Function
Th e f itnes s f u nction s h ou l d be d es igned to giv e grad ed and con
tinu ou s f eed back abou t h ow wel l a p rogram p erf orms on th e training
s et.
Definition 5.6 A continuous fitness function is an y man n er
of calculatin g fitn ess in which smaller improvemen ts in how well a
program has learn ed the learn in g domain are related to smaller im
provemen ts in the measured fitn ess of the program, an d larger im
provemen ts in how well a program has learn ed the learn in g domain
are related to larger improvemen ts in its measured fitn ess.
Such continu ity is an imp ortant p rop erty of a f itnes s f u nction becau s e
it allows GP to imp rov e p rograms iterativ el y. Two more d ef initions
will be u s ef u l bef ore we go into more d etail abou t f itnes s f u nctions .
Definition 5.7 Standardized fitness is a fitn ess fun ction or a
tran sformed fitn ess fun ction in which zero is the value assign ed to
the fittest in dividual.
S tand ard ized f itnes s h as th e ad minis trativ e f eatu re th at th e bes t
fitness is al ways th e s ame v al u e (zero), regard l es s of wh at p robl em
one is working on.
Definition 5.8 Normalized fitness is a fitn ess fun ction or a tran s
formed fitn ess fun ction where fitn ess is always between zero an d on e.
With th es e d ef initions in h and , l et u s l ook at an examp l e. S up
p ose we want to f ind a f u nction s atis f ying th e f itnes s cas es in Ta
ble 5.1. E ach inp u t/ou tp u t p air cons titu tes a training ins tance or
f itnes s cas e. C ol l ectiv el y, al l of th e f itnes s cas es cons titu te th e train
ing s et.
Standardized Fitness
I np u t O u tp u t
Fitnes s C as e 1
Fitnes s C as e 2
Fitnes s C as e 3
Fitnes s C as e 4
Fitnes s C as e 5
1
2
4
7
9
2
6
20
56
90
Table 5.1
Input and output values
in a training set
S u p p os e th at GP was to ev ol v e a p rogram th at l earned th e p at
terns in th e Tabl e 5.1 training s et - th at is , a p rogram th at cou l d
p red ict th e ou tp u t col u mn by knowing onl y th e v al u e in th e inp u t
colu mn. Th e read er wil l p robabl y note th at th is examp l e is triv ial l y
s imp le and th at a p rogram rep res enting th e f u nction f(x) a;
2
+ x
would be a p erf ect match on th is training s et.
Normalized Fitness
Error Fitness Function
O ne s imp l e and continu ou s f itnes s f u nction th at we cou l d u s e for
th is p robl em wou l d be to cal cu l ate th e s u m of th e abs ol u te v al u e of
th e d if f erences between actu al ou tp u t of th e p rogram and th e ou tp u t
giv en by th e training s et (th e error). More f ormal l y, l et th e ou tp u t of
th e z'th examp l e in th e training s et be DJ. Let th e ou tp u t from a GP
p rogram p on th e z'th examp l e from th e training s et be pi. I n th at
cas e, for a training s et of n examp l es th e f itnes s f
p
of p wou l d be:
(5.3)
Th is f itnes s f u nction is continu ou s . A s pi gets a l ittl e cl os er to
Oi, th e f itnes s gets a l ittl e better. I t is al s o s tand ard ized becau s e any
p erf ect s ol u tion, l ike f(x) = x
2
+ x, wou l d h av e zero f itnes s .
Squared Error Fitn ess A common al ternativ e f itnes s f u nction is to cal cu l ate th e s u m of
Fun ction th e s qu ared d if f erences between pi and o,, cal l ed th e squared error.
Scaled Fitn ess I n s ome ap p l ications a s qu ared or oth erwis e s cal ed f itnes s mea-
Fun ction s s u rement can res u l t in better s earch res u l ts . S cal ing ref ers to th e
f act th at one can amp l if y or d amp s mal l er d ev iations from th e target
ou tp u t. A s qu are f u nction d amp s s mal l d ev iations , wh ereas a s qu are
root or inv ers e f u nction amp l if ies th em.
How d o th es e d if f erent f itnes s f u nctions affect th e f itnes s calcu la
tion? S u p p os e th at one ind iv id u al , Q, in a GP p op u l ation is equiv
al ent to x
2
. Tabl e 5.2 s h ows th e ou tp u t v al u es of Q for th e s ame
training ins tances u s ed in Tabl e 5.1. Th e l as t two col u mns of Tabl e
5.2 are th e f itnes s f or Q cal cu l ated by th e error and th e s qu ared error
meth od s , res p ectiv el y.
J
Fitnes s C as e 1
Fitnes s C as e 2
Fitnes s C as e 3
Fitnes s C as e 4
Fitnes s C as e 5
| Total f itnes s
I np u t
1
2
4
7
9
-
O u tp u t
2
6
20
56
90
-
Q O u tp u t
1
4
16
49
81
-
E rror f itnes s
1
2
4
7
9
23
S qu ared error f itnes s |
2
4
16
49
81
151 |
Table 5.2
Two different fitness
calculation s Wh ere th e l earning d omain is comp ris ed of nu meric inp u ts and
ou tp u ts , th e p roces s of ind u cing p rograms th at h av e l earned th e nu -
Symbolic Regression meric examp l es is cal l ed s ymbol ic regres s ion. Many GP ap p l ications
(5.4)
can be ref ormu l ated as ins tances of s ymbol ic regres s ion. Th e abov e
p roblem is an examp l e of s ymbol ic regres s ion.
Th ere are many oth er ways to cas t a f itnes s f u nction. E xamp l es
of f itnes s f u nctions s imil ar to s ymbol ic regres s ion are:
G Th e nu mber of match ing p ixel s in an image match ing ap p l ica
tion.
Q Th e nu mber of wal l h its for a robot control l ed by GP and learn
ing obs tacl e av oid ance.
Q Th e nu mber of correctl y cl as s if ied examp l es in a cl as s if ication
tas k.
Q Th e d ev iation between p red iction and real ity in a p red iction
ap p l ication.
Q Th e money won by a GP-control l ed agent in a betting game.
Q Th e amou nt of f ood f ou nd and eaten by an artif icial agent in
an artif icial life ap p l ication.
Th ere are al s o oth er meth od s for cal cu l ating f itnes s . I n co-ev
ol u tion meth od s for f itnes s ev al u ation [A ngel ine and Pol l ack, 1993]
Hillis , 1992], ind iv id u al s comp ete agains t each oth er with ou t an ex
p licit f itnes s v al u e. I n a game-p l aying ap p l ication, th e winner in a
game may be giv en a h igh er p robabil ity of rep rod u ction th an th e
los er. I n s ome cas es , two d if f erent p op u l ations may be ev ol v ed si
mu l taneou s l y with conf l icting goal s . For examp l e, one p op u l ation
migh t try to ev ol v e p rograms th at s ort l is ts of nu mbers wh il e th e
oth er p op u l ation tries to ev ol v e l is ts of nu mbers th at are h ard to
s ort. Th is meth od is ins p ired by arms races in natu re wh ere, for
examp l e, p red ators and p rey ev ol v e togeth er with conf l icting goal s .
I n s ome cas es , it migh t be ad v antageou s to combine v ery d if f erent
concep ts in th e f itnes s criteria. We cou l d ad d terms for th e l ength
of th e ev ol v ed p rograms or th eir execu tion s p eed , etc. S u ch a f itnes s
fu nction is ref erred to as a multiobjective fitn ess fun ction .
5.5.2 The Selection Algorithm
A fter th e qu al ity of an ind iv id u al h as been d etermined by ap p l ying a
f itnes s f u nction, we h av e to d ecid e wh eth er to ap p l y genetic op erators
to th at ind iv id u al and wh eth er to keep it in th e p op u l ation or al l ow it
to be rep l aced . Th is tas k is cal l ed s el ection and as s igned to a s p ecial
op erator, th e s el ection op erator.
Th ere are v ariou s d if f erent s el ection op erators , and a d ecis ion
abou t th e meth od of s el ection to be ap p l ied u nd er p articu l ar circu m
s tances is one of th e mos t imp ortant d ecis ions to be mad e in a GP
The GA Scenario
The ES Scenario
ru n. S el ection is res p ons ibl e for th e s p eed of ev ol u tion and is of ten
cited as th e cu l p rit in cas es wh ere p rematu re conv ergence s tal l s th e
s u cces s of an ev ol u tionary al gorith m.
We s h al l d is cu s s s el ection in a v ery general context h ere, incl u d ing
s ome d etail s of wh at h as been d ev el op ed in th e E S commu nity. Selec
tion in general is a cons equ ence of comp etition between ind iv id u al s
in a p op u l ation. Th is comp etition res u l ts from an ov erp rod u ction of
ind iv id u al s wh ich can with s tand th e comp etition to v arying d egrees .
Th e d egree to wh ich th ey can with s tand th e comp etition is regu l ated
by th e s el ection p res s u re, wh ich d ep end s on th e ratio of of f s p ring to
ind iv id u al s in th e p op u l ation.
Two main s cenarios for generational s el ection h av e been es tab
l is h ed s ince ev ol u tionary al gorith ms were f irs t s tu d ied in th e 1960s :
(i) th e GA s cenario, and (ii) th e E S s cenario.
Th e GA s cenario s tarts with a p op u l ation of ind iv id u al s with
known f itnes s and p erf orms a s el ection of ind iv id u al s bas ed on th eir
f itnes s . Th es e are th en s u bjected to v ariation op erations l ike cross
ov er and mu tation or p as s ed on u ntou ch ed v ia rep rod u ction into th e
next generation. I n th is way, th e p ool of th e f ol l owing generation
is f il l ed with ind iv id u al s . Th e next generation u s u al l y cons is ts of
th e s ame nu mber of ind iv id u al s as th e f ormer one, and f itnes s com
p u tation f ollows in p rep aration for anoth er rou nd of s el ection and
breed ing. Figu re 5.9a ou tl ines th e p roced u re, al s o known as mating
s el ection.
Th e E S s cenario is d if f erent. S tarting from a giv en p op u l ation,
a u s u al l y l arger s et of of f s p ring is generated by rand oml y s el ecting
p arents . A f ter f itnes s ev al u ation, th is p op u l ation is th en red u ced
by s el ection to th e s ize of th e original p op u l ation. Th u s , a s mal l er
p op u l ation can be u s ed , as th e s el ection is ap p l ied to th e p ool of
of f s p ring (p os s ibl y incl u d ing ev en th e p arents ). Figu re 5.9b ou tl ines
th e p roced u re, al s o known as ov erp rod u ction s el ection.
Th e d if f erence between th e two generational s cenarios may be
s een in th e abil ity in th e E S typ e s cenario to tu ne s el ection p res s u re
by ad ju s ting th e ratio of th e nu mber of of f s p ring to th e nu mber of
p arents . Th e l arger th is ratio, th e h igh er th e s el ection p res s u re. A
corres p ond ing p res s u re can be introd u ced into GA s if th e requ ire
ment is rel axed th at an equ al nu mber of of f s p ring be p rod u ced af ter
s el ection. If th e s ize of th e of f s p ring p ool is l arger th an th e s ize of
th e p arent p ool , th en again a l arger s el ection p res s u re is exerted .
Fitness-Proportional Selection
Fitnes s -p rop ortional s el ection is emp l oyed in a GA s cenario for gener
ational s el ection and s p ecif ies p robabil ities for ind iv id u al s to be giv en
a ch ance to p as s of f s p ring into th e next generation. A n ind iv id u al i
is giv en a p robabil ity of
Figure 5.9
Different selection
schemes in EAs of type
A GA and B ES
(5.5)
for being abl e to p as s on traits . Dep end ing on th e v ariation op erator
u s ed , th is migh t res u l t (i) in a cop y of th at ind iv id u al , or (ii) in a
mu tated cop y, or (iii) in cas e two ind iv id u al s h av e been s el ected in
th e way mentioned , two of f s p ring with mixed traits being p as s ed into
th e next generation.
Following Hol l and [Hol l and , 1975], f itnes s -p rop ortional s el ection
h as been th e tool of ch oice for a l ong time in th e GA commu nity. I t
h as been h eav il y criticized in recent times for attach ing d if f erential
p robabil ities to th e abs ol u te v al u es of f itnes s [Blickle and Th iel e, 1995].
E arly remed ies for th is s itu ation were introd u ced th rou gh f itnes s scal
ing, a meth od by wh ich abs ol u te f itnes s v al u es were mad e to ad ap t
to th e p op u l ation av erage [Gref ens tette and Baker, 1989], and oth er
meth od s [Koza, 1992d ].
Truncation or (//, A) Selection
Th e s econd mos t p op u l ar meth od for s el ection comes f rom E S -typ e
al gorith ms [S ch wefel, 1995] wh ere it is known as (/z, A) s el ection. A
nu mber n of p arents are al l owed to breed A of f s p ring, ou t of wh ich th e
H bes t are u s ed as p arents for th e next generation. Th e s ame meth od
h as been u s ed for a l ong time in p op u l ation genetics and by breed ers
[C row and Kimu ra, 1970] [Bu l mer, 1980] u nd er th e name tru ncation
s el ection [Miih l enbein and S ch l ierkamp -Voos en, 1994].
A v ariant of E S s el ection is (p, + A) s el ection [Rech enberg, 1994]
wh ere, in ad d ition to of f s p ring, th e p arents p articip ate in th e s el ection
p roces s .
Neith er (/u, A) / tru ncation s el ection nor th e f ollowing s el ection
p roced u res are d ep end ent on th e abs ol u te f itnes s v al u es of ind iv id u al s
in th e p op u l ation. Th e n bes t wil l al ways be th e bes t, regard l es s of
th e abs ol u te f itnes s d if f erences between ind iv id u al s .
Ranking Selection
Ranking s el ection [Gref ens tette and Baker, 1989] [Wh itl ey, 1989] is
bas ed on th e f itnes s ord er, into wh ich th e ind iv id u al s can be s orted .
Th e s el ection p robabil ity is as s igned to ind iv id u al s as a f u nction of
th eir rank in th e p op u l ation. Mainl y, l inear and exp onential ranking
are u s ed . For l inear ranking, th e p robabil ity is a l inear f u nction of
th e rank:
wh ere p /N is th e p robabil ity of th e wors t ind iv id u al being s el ected ,
and p
+
/N th e p robabil ity of th e bes t ind iv id u al being s el ected , and
with 0 <c<l.
Tournament Selection
Tou rnament s el ection is not bas ed on comp etition with in th e full
generation bu t in a s u bs et of th e p op u l ation. A nu mber of ind iv id u
al s , cal l ed th e tou rnament s ize, is s el ected rand oml y, and a s electiv e
(5.6)
(5.7)
s h ou l d h ol d in ord er for th e p op u l ation s ize to s tay cons tant.
For exp onential ranking, th e p robabil ity can be comp u ted u s ing
a s el ection bias cons tant c,
(5.8)
comp etition takes p l ace. Th e traits of th e better ind iv id u al s in th e
tou rnament are th en al l owed to rep l ace th os e of th e wors e ind iv id
u al s . I n th e s mal l es t p os s ibl e tou rnament, two ind iv id u al s comp ete.
Th e better of th e two is al l owed to rep rod u ce with mu tation. Th e
res u lt of th at rep rod u ction is retu rned to th e p op u l ation, rep l acing
th e los er of th e tou rnament.
Th e tou rnament s ize al l ows res earch ers to ad ju s t s el ection p res
s u re. A s mal l tou rnament s ize cau s es a low s el ection p res s u re, and a
large tou rnament s ize cau s es h igh p res s u re.
Tou rnament s el ection h as recentl y become a mains tream meth od
for s el ection, mainl y becau s e it d oes not requ ire a central ized f itnes s
comp aris on between al l ind iv id u al s . Th is not onl y accel erates evo
l u tion cons id erabl y, bu t al s o p rov id es an eas y way to p aral l el ize th e
al gorith m. With f itnes s -p rop ortional s el ection, th e commu nication
ov erh ead between ev al u ations wou l d be rath er l arge.
5.6 The Basic GP Algorithm
I t is now p os s ibl e to as s embl e al l of th e ind iv id u al el ements (f u nctions ,
terminal s , f itnes s -bas ed s el ection, genetic op erators , v ariabl e l ength
p rograms , and p op u l ation initial ization) into an ov eral l al gorith m
for a bas ic GP ru n. Th ere are two ways to cond u ct a GP ru n, a
generational ap p roach and a s tead y-s tate ap p roach . I n generational
GP, an entire new generation is created from th e ol d generation in
one cycl e. Th e new generation rep l aces th e ol d generation and th e
cycle continu es . I n s tead y-s tate GP, th ere are no generations . We
will p res ent an al gorith m for each ap p roach .
Firs t, h owev er, we wil l rev iew th e p rep aratory s tep s for making
a GP ru n. Th en we wil l d is cu s s th e two bas ic ways to ap p roach th e
GP ru n al gorith m its el f .
Summary of Preparatory Steps
Here are th e p rel iminary s tep s in a GP ru n, wh ich we h av e al read y
d es cribed in d etail in th is ch ap ter.
1. Define th e terminal s et.
2. Define th e f u nction s et.
3. Define th e f itnes s f u nction.
4. Define p arameters s u ch as p op u l ation s ize, maxiirmm ind iv id u al
s ize, cros s ov er p robabil ity, s el ection meth od , and termination
criterion (e.g., maximu m nu mber of generations ).
O nce th es e s tep s are comp l eted , th e GP ru n can commence. How
it p roceed s d ep end s on wh eth er it is generational or s tead y s tate.
Generational GP Algorithm
Trad itional l y, genetic p rogramming u s es a gen eration al ev ol u tionary
al gorith m. I n generational GP, th ere exis t wel l -d ef ined and d is tinct
generations . E ach generation is rep res ented by a comp l ete p op u la
tion of ind iv id u al s . Th e newer p op u l ation is created f rom and th en
rep l aces th e ol d er p op u l ation. Th e execu tion cycl e of th e generational
GP al gorith m incl u d es th e f ol l owing s tep s :
1. I nitial ize th e p op u l ation.
2. E v al u ate th e ind iv id u al p rograms in th e exis ting p op u l ation.
A s s ign a nu merical rating or f itnes s to each ind iv id u al .
3. Until th e new p op u l ation is f u lly p op u l ated , rep eat th e following
s tep s :
Q S el ect an ind iv id u al or ind iv id u al s in th e p op u l ation u s ing
th e s el ection al gorith m.
Q Perf orm genetic op erations on th e s el ected ind iv id u al or
ind iv id u al s .
Q I ns ert th e res u l t of th e genetic op erations into th e new
p op u l ation.
4. If th e termination criterion is f u lf illed , th en continu e. O th er
wis e, rep l ace th e exis ting p op u l ation with th e new p op u l ation
and rep eat s tep s 2-4.
5. Pres ent th e bes t ind iv id u al in th e p op u l ation as th e ou tp u t from
th e al gorith m.
Steady-State GP Algorithm
Th e s tead y-s tate or tou rnament s el ection mod el is th e p rincip al al
ternativ e to generational GP. I n th is ap p roach th ere are no f ixed
generation interv al s . I ns tead , th ere is a continu ou s f l ow of ind iv id u
al s meeting, mating, and p rod u cing of f s p ring. Th e of f s p ring rep l ace
exis ting ind iv id u al s in th e s ame p op u l ation. Th e meth od is s imp l e
to imp l ement and h as s ome ef f iciency benef its togeth er with benef its
f rom p aral l el ization. Good general conv ergence res u l ts h av e been re
p orted with th e meth od , and it is cu rrentl y gaining grou nd in th e
res earch commu nity. Here is an examp l e of a bas ic GP al gorith m
u s ing th e s tead y-s tate meth od and a s mal l tou rnament s ize for selec
tion.
1. I nitial ize th e p op u l ation.
2. Rand oml y ch oos e a s u bs et of th e p op u l ation to take p art in th e
tou rnament (th e comp etitors ).
3. E v al u ate th e f itnes s v al u e of each comp etitor in th e tou rnament.
4. S el ect th e winner or winners f rom th e comp etitors in th e tou r
nament u s ing th e s el ection al gorith m.
5. A p p l y genetic op erators to th e winner or winners of th e tou r
nament.
6. Rep l ace th e l os ers in th e tou rnament with th e res u l ts of th e
ap p l ication of th e genetic op erators to th e winners of th e tou r
nament.
7. Rep eat s tep s 2-7 u ntil th e termination criterion is met.
8. C h oos e th e bes t ind iv id u al in th e p op u l ation as th e ou tp u t f rom
th e al gorith m.
Th e ap p roach is cal l ed s tead y s tate becau s e th e genetic op era
tors are ap p l ied as ynch ronou s l y and th ere is no central ized mech a
nism for exp l icit generations . Nev erth el es s , it is cu s tomary in p re
s enting res u l ts with s tead y-s tate GP to tal k abou t generations . I n
f act, s tead y-s tate generations are th e interv al s d u ring training wh ich
can be s aid to corres p ond to generations in a generational GP al
gorith m. Th es e interv al s are of ten wh en f itnes s is ev al u ated for th e
same nu mber of ind iv id u al s as th e p op u l ation s ize. For exp eriments
and d etail ed ref erences on generational v ers u s s tead y-s tate GP s ee
[Kinnear, Jr., 1993b].
5.7 An Example Run
Th is s ection d emons trates s ome examp l es of ind iv id u al s and mea
s u rements from a typ ical GP ru n. Th e tas k was a f u nction regres s ion
with th e s imp l e f u nction:
(5.9)
Ten f itnes s cas es were u s ed for th is f u nction regres s ion tas k, taken
from th e x-interv al [0,1] and s h own in Tabl e 5.3.
Following th e s tep s of S ection 5.6 we p rep are th e ru n by f irs t
d ecid ing on th e f ollowing is s u es :
1. Terminal s et: Variabl e x, integer cons tants between -5 and +5.
Table 5.3
Fitness cases (input and
output values) in the
training set
1
Fitnes s C as e 1
Fitnes s C as e 2
Fitnes s C as e 3
Fitnes s C as e 4
Fitnes s C as e 5
Fitnes s C as e 6
Fitnes s C as e 7
Fitnes s C as e 8
Fitnes s C as e 9
Fitnes s C as e 10
I np u t
0.000
0.100
0.200
0.300
0.400
0.500
0.600
0.700
0.800
0.900
O u tp u t [
0.000
0.005
0.020
0.045
0.080
0.125
0.180
0.245
0.320
0.405
2. Fu nction s et: A rith metic f u nctions +, - , *, '/,.
3. Fitnes s f u nction: S tand ard ized f itnes s , bas ed on root mean
s qu are error ov er 10 f itnes s cas es .
4. Parameters of ind iv id u al and p op u l ation, th e initial ization and
s el ection meth od , op erator p robabil ities .
Koza h as introd u ced a v ery l u cid f orm of l is ting p arameters in
th e tabl eau of Tabl e 5.4 named af ter h im. From th ere, we can read
off th at P 600 ind iv id u al s were u s ed for th is GP ru n in a tree-
bas ed s ys tem. C ros s ov er p robabil ity was p
c
0.9. Fitnes s was bas ed
on th e error th at an ind iv id u al p rod u ced wh en fed with th e inp u t of
th es e f itnes s cas es . More d etail s are l is ted in th e tabl e.
Let u s ins p ect s ome s el ected ind iv id u al s f rom a GP ru n. I n initial
generation 0, th e d is tribu tion of f itnes s v al u es was broad . Figu re 5.10
s h ows th e bes t ind iv id u al in generation 0. We s h al l cal l th e f u nction
res u l ting f rom th e bes t ind iv id u al in generation i fi(x). S o /o read s :
(5.12)
Figu res 5.11-5.15 s h ow bes t ind iv id u al s from s u bs equ ent genera
tions 1, 2, 3, and f rom generation 5. S o / i read s :
(5.10)
(5.11)
A s we can s ee, th e tree s ize f irs t exp and s on its way to an op timal
s ol u tion and th en s h rinks again. /2 read s :
Table 5.4
Koza Tableau
Figure 5.10
Best individual in
generation 0. % is
protected division.
/o(x) = f
I n generation 3, th e bes t ind iv id u al h as f ou nd th e correct s ol u tion
iu its s imp l es t f orm.
(5.13)
S u bs equ ent generations s tart to combine th is correct s ol u tion
with oth ers , with th e cons equ ence th at th e s ize of th e bes t ind iv id u al
increas es again. Becau s e we d id not al ways cons erv e th e bes t ind i
v id u al f ou nd s o f ar (a s trategy th at is cal l ed elitist and cou l d be u s ed
in a GP ru n), qu al ity fell again in l ater generations .
Tabl e 5.5 s h ows h ow th e f u nction of th e bes t ind iv id u al p rogram
ap p roach es d es ired ou tp u ts ov er th e cou rs e of generations 0-3. Fig-
| Parameters
objectiv e:
terminal s et:
f u nction s et:
p op u l ation s ize:
cros s ov er p robabil ity:
mu tation p robabil ity:
s el ection:
termination criterion:
maximu m nu mber of generations :
maximu m d ep th of tree af ter cros s ov er:
maximu m mu tant d ep th :
initial ization meth od :
Val u es
ev ol v e f u nction f itting th e v al u es
of th e f itnes s cas e tabl e
x, integers f rom -5 to +5
A DD, S UB, MUL, DI V
600
90 p ercent
5 p ercent
tou rnament s el ection, s ize 4
none
100
200
4
grow
Figure 5.11
Best individual in
generation 1. Tree has
expanded considerably.
Figure 5.12
Best individual in
generation 2. Tree has
expanded again. (See
text)
u re 5.16 s h ows th e corres p ond ing beh av ior of th e f u nctions for th e
bes t ind iv id u al s .
Figure 5.13
Best individual in
generation 2 continued:
Subtree Sub 1
Figure 5.14
Best individual in
generation 3. Perfect
individual of simplest
form found. f(x) = ^-
Fitnes s C as e 1
Fitnes s C as e 2
Fitnes s C as e 3
Fitnes s C as e 4
Fitnes s C as e 5
Fitnes s C as e 6
Fitnes s C as e 7
Fitnes s C as e 8
Fitnes s C as e 9
Fitnes s C as e 10
Target ou tp u t
0.000000
0.005000
0.020000
0.045000
0.080000
0.125000
0.180000
0.245000
0.320000
0.405000
Gen. 0
0.000000
0.033333
0.066667
0.100000
0.133333
0.166667
0.200000
0.233333
0.266667
0.300000
Gen. 1
0.000000
0.017544
0.037037
0.058824
0.083333
0.111111
0.142857
0.179487
0.222222
0.272727
Gen. 2
0.000000
0.002375
0.009863
0.023416
0.044664
0.076207
0.122140
0.188952
0.287024
0.432966
Gen. 3
0.000000
0.005000
0.020000
0.045000
0.080000
0.125000
0.180000
0.245000
0.320000
0.405000
Th e abov e ind iv id u al s are f rom a s ingl e GP ru n - a d ynamic
p roces s th at ch anges p rof ou nd l y d u ring its execu tion. Figu re 5.17
Table 5.5
Target output and best
individual output for
generations 0 to 3
Figure 5.15
Best individual in
generation 5. Length
increases again. Fitness
score is still perfect.
Figure 5.16
Behavior of best
individuals of generations
0, 1, 2, 3. Generation 3
individual is identical to
function itself.
s h ows h ow th e av erage f itnes s of th e entire p op u l ation and th e f itnes s
of th e bes t ind iv id u al ch ange as th e ru n p rogres s es .
A s we s h al l d is cu s s in C h ap ter 7, it is ins tru ctiv e to obs erv e th e
d ev el op ment of p rogram comp l exity d u ring a ru n. We h av e th eref ore
incl u d ed a comp l exity meas u re in Figu re 5.17 for il l u s trativ e pur
p os es . We can s ee th at av erage l ength of p rograms begins to increas e
qu ickl y af ter th e bes t f itnes s h as arriv ed at its op timal v al u e.
Figure 5.17
Development of fitness
over generations. Best
individual, average
fitness, average length of
individuals, scaled
Wh at is interes ting is h ow th e s imp l e p roces s of a GP ru n - s ome
terminal s , s ome f u nctions , cros s ov er, mu tation, and iteration - cou l d
h av e s u ch a p rof ou nd ef f ect. Th is d ynamic natu re of th e GP p roces s
and th e many ways in wh ich it manif es ts its el f wil l p rov e to be a
recu rring th eme in th is book.
Exercises
1. Mention th ree imp ortant f eatu res s h ared by mos t GP s ys tems .
2. Wh at are th e two d if f erent bas ic comp onents of a GP p rogram
s tru ctu re?
3. Giv e two d if f erent typ es of terminal s .
4. Wh at is th e arity of a f u nction?
5. Des cribe th ree d if f erent typ es of GP genomes .
6. Des cribe two meth od s for initial ization of a tree s tru ctu re ind i
v id u al .
7. Name th e p rincip al op erations of a GP s ys tem.
8. How d oes a bas ic cros s ov er op erator work in a tree s tru ctu re?
9. Des cribe th ree d if f erent s el ection al gorith ms .
10. Wh ich are th e p rep aratory s tep s bef ore a GP exp eriment?
11. Wh at is th e d if f erence between generational GP and s tead y-
s tate GP?
12. Wh y d o we not u s e onl y th e bes t ind iv id u al s as a s ou rce for th e
next generation?
13. Des ign a terminal and f u nction s et in ord er to cl as s if y d ogs as
terriers , s tand ard p ood l es , toy p ood l es , or German s h ep h erd s .
Wh ich terminal s and f u nctions wou l d you not incl u d e and wh y?
14. Des ign a terminal and f u nction s et to d eriv e one of Kep l er's
l aws . Did you cons id er and reject th e incl u s ion of any terminal s
or f u nctions ?
15. Formu l ate th e grow meth od of initial ization in l inear GP.
6 Crossover The
Center of the Storm
C ontents
6.1 The Theoretical Basis for the
Building Block Hypothesis in GP 145
6.2 Preservation and Disruption of Building
Blocks: A Gedanken Experiment 148
6.2.1 Crossover as a Disruptive Force 148
6.2.2 Reproduction and Crossover 150
6.3 Empirical Evidence of Crossover Effects . . . 151
6.3.1 The Effect of Crossover on the Fitness
of Offspring 151
6.3.2 The Relative Merits of Program Induction via
Crossover versus Hill Climbing or Annealing . . . . 153
6.3.3 Conclusions about Crossover as Macromutation . 155
6.4 Improving Crossover The Argument
from Biology 156
6.5 Improving Crossover New Directions . . . . 158
6.5.1 Brood Recombination 158
6.5.2 "Intelligent" Crossover 161
6.5.3 Context-Sensitive Crossover 162
6.5.4 Explicit Multiple Gene Systems 163
6.5.5 Explicitly Defined Introns 164
6.5.6 Modeling Other Forms of Genetic Exchange.. . . 165
6.6 Improving Crossover - A Proposal 166
6.7 Improving Crossover - The Tradeoffs 169
6.8 Conclusion 170
Crossover and Building
Blocks
Crossover -The
Controversy
S earch op erators are among th e mos t imp ortant p arts of any mach ine
l earning s ys tem - th ey d ef ine th e manner in wh ich th e s ys tem mov es
th rou gh th e s p ace of cand id ate s ol u tions (s ee C h ap ter 1). I n mos t GP
s ys tems , cros s ov er is th e p red ominant s earch op erator. For examp l e,
in [Koza, 1992d ] th e cros s ov er op erator is ap p l ied 90% of th e time.
Mos t GP res earch ers h av e followed s u it.
GP's h eav y u s e of cros s ov er is more th an ju s t a p ref erence. C h ap
ter 2 anal yzed th e mech anis m of biol ogical s exu al rep rod u ction, in
cl u d ing cros s ov er, at s ome l ength . Th e remarkabl e amou nt of bi
ol ogical energy th at goes into maintaining s p ecies and h omol ogou s
cros s ov er s u gges ts th at cros s ov er may well be an ef f ectiv e s earch op
erator in p op u l ation-bas ed mach ine l earning s ys tems l ike GP. Th e
anal ogy with biol ogical cros s ov er is , of cou rs e, th e original ins p iration
for th e u s e of cros s ov er in mach ine l earning s ys tems . S imp l y p u t, GP
cros s ov er attemp ts to mimic th e p roces s of s exu al rep rod u ction.
Th e cros s ov er op erator h as been u s ed as bas is for th e cl aim th at
GP s earch is more ef f ectiv e th an s ys tems bas ed on rand om trans f or
mations (mu tations ) of th e cand id ate s ol u tions , l ike s imu l ated an
neal ing. E s s ential l y, Koza h as argu ed th at a GP p op u l ation contains
buildin g blocks. S imp l y p u t, a bu il d ing bl ock cou l d be any GP tree or
s u btree th at s h ows u p in a f raction of th e p op u l ation. Th e bu il d ing
bl ock h yp oth es is of GP f ollows th e s ame l ine of argu ment as d oes th e
bu il d ing bl ock h yp oth es is f rom genetic al gorith ms [Hol l and , 1975].
Good bu il d ing bl ocks imp rov e th e f itnes s of ind iv id u al s th at incl u d e
th em. Th eref ore, ind iv id u al s with good bu il d ing bl ocks are more
l ikel y to be s el ected for rep rod u ction or breed ing. Hence, good bu ild
ing bl ocks are l ikel y to mu l tip l y and s p read as th ey are d u p l icated
and exch anged among ind iv id u al s .
GP works f as ter th an s ys tems ju s t bas ed on mu tations , accord ing
to th is h yp oth es is , becau s e good bu il d ing bl ocks get combined into
ev er l arger and better bu il d ing bl ocks to f orm better ind iv id u al s .
Th is argu ment is bas ed on th e s ch ema th eorem, wh ich is one of th e
th eoretical u nd erp innings of genetic al gorith ms [Gol d berg, 1989].
Th e argu ment abou t th e ef f ectiv enes s of cros s ov er h as generated
a good d eal of controv ers y in oth er p arts of th e mach ine l earning com
mu nity [Lang, 1995] and h as al s o p rov oked s ome th ou gh tf u l anal ys is
in th e GP commu nity abou t ju s t wh at a bu il d ing bl ock in GP is and
wh eth er we can real is tical l y exp ect good GP bu il d ing bl ocks to be se
l ected by th e cros s ov er op erator and to be combined into l arger and
better s ol u tions [A l tenberg, 1994b] [O 'Reil l y and O p p ach er, 1992].
Th is ch ap ter wil l f ocu s on th e central d is p u te regard ing th e cross
ov er op erator by p os ing th e f ol l owing two qu es tions :
6.1 The Theoretical Basis for the Building Block Hypothesis in GP
Q Does th e GP cros s ov er op erator ou tp erf orm mu tation-bas ed
s ys tems by l ocating and combining good bu il d ing bl ocks or is
GP cros s ov er, its el f , a f orm of macromu tation?
Q Wh at s orts of imp rov ements may be mad e to th e cros s ov er op
erator to imp rov e its p erf ormance?
O u r d is cu s s ion of oth er imp ortant as p ects of th e cros s ov er op er
ator, s u ch as its rol e in creating s o-cal l ed in tron s wil l be d ef erred to
l ater ch ap ters .
Th is ch ap ter wil l f ocu s at l ength on th e u nd ou bted s h ortcom
ings of th e GP cros s ov er op erator. I t is imp ortant, nev erth el es s , to
remember th at somethin g is going on with GP cros s ov er. GP h as
amas s ed an imp res s iv e record of ach iev ements in onl y a few years .
Wh eth er cros s ov er acts as a macromu tation op erator or wh eth er it
can, in ad d ition, l ocate good s ch emata and combine th em into better
s ch emata, GP cros s ov er al read y h as a s u bs tantial record of accom
p l is h ment.
Th e next s ev eral s ections of th is ch ap ter wil l be d ev oted to a
critical anal ys is of GP cros s ov er. Firs t, we wil l l ook at th e th eoretical
bas es for both th e bu il d ing bl ock h yp oth es is and th e notion th at
GP cros s ov er is real l y a macromu tation op erator. S econd , we wil l
s u rv ey th e emp irical ev id ence abou t th e effect of cros s ov er. Th ird ,
we will comp are and contras t GP cros s ov er with biol ogical cros s ov er.
Final l y, we wil l l ook at s ev eral p romis ing d irections for imp rov ing GP
cros s ov er.
6.1 The Theoretical Basis for the
Building Block Hypothesis in GP
Th e schema theorem of Hol l and [Hol l and , 1975] is one of th e mos t in
f l u ential and d ebated th eorems in ev ol u tionary al gorith ms in general
and genetic al gorith ms in p articu l ar. Th e s ch ema th eorem ad d res s es
th e central qu es tion of wh y th es e al gorith ms work robu s tl y in s u ch
a broad range of d omains . E s s ential l y, th e s ch ema th eorem for f ixed
l ength genetic al gorith ms s tates th at good s ch emata (p artial bu il d ing
blocks th at tend to as s is t in s ol v ing th e p robl em) wil l tend to mu l tip l y
exp onential l y in th e p op u l ation as th e genetic s earch p rogres s es and
will th ereby be combined into good ov eral l s ol u tions with oth er s u ch
s ch emata. Th u s , it is argu ed , f ixed l ength genetic al gorith ms wil l
d ev ote mos t of th eir s earch to areas of th e s earch s p ace th at contain
p romis ing p artial s ol u tions to th e p robl em at h and .
Recentl y, qu es tions h av e been rais ed abou t th e v al id ity of th e
sch ema th eorem for f ixed l ength genetic al gorith ms . Nev erth el es s ,
Koza's Schema
Theorem Analysis
O'Reilly's Schema
Theorem Analysis
th e s ch ema th eorem remains th e bes t s tarting p oint for a math emat
ical l y bas ed anal ys is of th e mech anis ms at work in genetic al gorith ms
u s ing cros s ov er. Th ere h av e been s ev eral attemp ts to trans f er th e
s ch ema th eorem f rom genetic al gorith ms to GP. Howev er, th e GP
cas e is mu ch more comp l ex becau s e GP u s es rep res entations of vary
ing l ength and al l ows genetic material to mov e f rom one p l ace to
anoth er in th e genome.
Th e cru cial is s u e in th e s ch ema th eorem is th e extent to wh ich
cros s ov er tend s to d is ru p t or to p res erv e good s ch emata. A l l of th e
th eoretical and emp irical anal ys es of th e cros s ov er op erator d ep end ,
in one way or anoth er, on th is bal ance between d is ru p tion and pre
s erv ation of s ch emata.
Koza was th e f irs t to ad d res s th e s ch ema th eorem in GP. I n h is
f irs t book [Koza, 1992d , p ages 116-119], Koza p rov id es a l ine of rea
s oning exp l aining wh y th e s ch ema th eorem ap p l ies to v ariabl e l ength
GP. I n h is argu ment, a s ch ema is a s et of s u btrees th at contains
(s omewh ere) one or many s u btrees f rom a s p ecial s ch ema d ef ining
s et. For examp l e, if th e s ch ema d ef ining s et is th e s et of S -exp res s ions
HI = {(- 2 y), (+ 2 3)} th en al l s u btrees th at contain ( 2 y) or
(+ 2 3) are ins tances of HI. Koza's argu ment is inf ormal and h e d oes
not s u gges t an ord ering or l ength d ef inition for h is s ch emata.
Koza's s tatement th at GP cros s ov er tend s to p res erv e, rath er
th an d is ru p t, good s ch emata d ep end s cru cial l y on th e GP rep rod u c
tion op erator, wh ich creates ad d itional cop ies of an ind iv id u al in th e
p op u l ation. I nd iv id u al s th at contain good s ch emata are more likely
to be h igh l y f it th an oth er ind iv id u al s . Th eref ore, th ey are more likely
to be rep rod u ced . Th u s , good s ch emata wil l be tes ted and combined
by th e cros s ov er op erator more of ten th an p oorer s ch emata. Th is
p roces s res u l ts in th e combination of s mal l er bu t good s ch emata into
bigger s ch emata and , u l timatel y, good ov eral l s ol u tions .
Th es e id eas are f ormal ized and extend ed cons id erabl y in
[O 'Reil l y and O p p ach er, 1995b] [O 'Reil l y and O p p ach er, 1994b] by
d ef ining a s ch ema as a mu l tis et of s u btrees and tree f ragments u nd er
f itnes s -p rop ortional s el ection and tree-bas ed cros s ov er. Fragments of
trees are d ef ined with a meth od s imil ar to Hol l and 's original s ch ema
th eorem u s ing a d on't care s ymbol (#). O 'Reil l y d ef ines h er s ch emata
s imil arl y to Koza bu t with th e p res ence of a d on't care s ymbol in one
or more s u btrees , HI = {( # y), (+ 2 #)}. Th u s , if th e d ef ining s et
for HI contains s ev eral id entical ins tances of a tree f ragment, th en
th e tree mu s t contain th e s ame nu mber of match ing s u btrees in ord er
to bel ong to th e s ch ema HI.
O 'Reil l y's u s e of th e d on't care s ymbol s is a major contribu tion to
GP s ch ema th eory. I t makes it p os s ibl e to d ef ine an order and a len gth
of th e s ch emata. Th e ord er of a s ch ema is th e nu mber of nod es wh ich
are n ot # s ymbol s and th e l ength is th e nu mber of lin ks in th e tree
f ragments p l u s th e nu mber of l inks connecting th em. Th e s u m of al l
links in a tree is v ariabl e and th e p robabil ity of d is ru p tion d ep end s on
th e size and s h ap e of th e tree match ing a s ch ema. O 'Reil l y th eref ore
es timates th e p robabil ity of d is ru p tion by th e maximum p robabil ity
of d is ru p tion, Pd(H,t), p rod u cing th e f ol l owing s ch ema th eorem:
(6.1)
f(H, t) is mean f itnes s of al l ins tances of a certain s ch ema H and f(i)
is av erage f itnes s in generation t, wh il e E[m(H, t + 1)] is th e exp ected
v alu e of th e nu mber of ins tances of H and p
c
is cros s ov er p robabil ity.
Th e d is ad v antage of u s ing th e maximu m p robabil ity is th at it
may p rod u ce a v ery cons erv ativ e meas u re of th e nu mber of s ch emata
in th e next generation. E v en th e maximu m p robabil ity of d is ru p
tion v aries with s ize, accord ing to O 'Reil l y's anal ys is . Wh il e th is is
not a s u rp ris ing res u l t in v ariabl e l ength GP, it makes it v ery diffi
cu lt to p red ict wh eth er good s ch emata wil l tend to mu l tip l y in th e
p op u l ation or wil l , ins tead , be d is ru p ted by cros s ov er.
Wh igh am h as f ormu l ated a d ef inition of s ch emata in h is grammar-
bas ed GP s ys tem (s ee C h ap ter 9) [Wh igh am, 1995c]. I n Wh igh am's
ap p roach , a s ch ema is d ef ined as a p artial d eriv ation tree. Th is ap
p roach l ead s to a s imp l er equ ation for th e p robabil ity of d is ru p tion
th an d oes O 'Reil l y's ap p roach . Howev er, l ike O 'Reil l y's d eriv ation,
Wh igh am's p red icted p robabil ity of d is ru p tion al s o d ep end s on th e
size of th e tree.
Recentl y, Pol l and Langd on [Langd on and Pol l , 1997] h av e for
mu l ated a new s ch ema th eorem th at as ymp totical l y conv erges to th e
GA s ch ema th eorem. Th ey emp l oyed 1-p oint cros s ov er and p oint mu
tation as GP op erators . Th e res u l t of th eir s tu d y s u gges ts th at th ere
migh t be two d if f erent p h as es in a GP ru n: a f irs t p h as e comp l etel y
d ep end ing on f itnes s , and a s econd p h as e d ep end ing on f itnes s and
s tru ctu re of th e ind iv id u al (e.g., s ch ema d ef ining l ength ). Wh ereas
th is work h as introd u ced new op erators to make s ch ema d ynamics
more trans p arent, Ros ca h as concentrated on th e s tru ctu ral as p ect
[Rosca, 1997]. He recentl y d eriv ed a v ers ion of th e s ch ema th eorem
for rooted-tree s ch emata. A rooted -tree s ch ema is a s u bs et of th e
set of p rogram trees th at match es an id entical tree f ragment wh ich
inclu d es th e tree root.
None of th e exis ting f ormu l ations of a GP s ch ema th eorem p re
d icts with any certainty th at good s ch emata will p rop agate d u ring
a GP ru n. Th e p rincip al p robl em is th e v ariabl e l ength of th e GP
rep res entation. I n th e abs ence of a s trong th eoretical bas is for th e
claim th at GP cros s ov er is more th an a macromu tation op erator, it
Whigham's Schema
Theorem Analysis
Newer Schema
Theorems
Inconclusive Schema
Theorem Results for
GP
is neces s ary to tu rn to oth er ap p roach es . I n th e next two s ections , we
wil l f irs t l ook at th e p robabil ity of d is ru p tion is s u e with a gedan ken
experimen t and th en anal yze th e emp irical s tu d ies of th e cros s ov er
op erator.
6.2 Preservation and Disruption of Building
Blocks: A Gedanken Experiment
We begin with an intu itiv e d is cu s s ion of th e d if f icu l ties of th e cross
ov er op erator. Firs t, we obs erv e th at th e cros s ov er op erator is a
d es tru ctiv e f orce as well as a cons tru ctiv e one. We h av e d is cu s s ed
th e inconcl u s iv e th eoretical bas is for cros s ov er's p os s ibl e rol e in as
s embl ing good bu il d ing bl ocks into comp l ete s ol u tions . Th is s ection
d es cribes a way to th ink abou t th e bal ance of th e cons tru ctiv e and
d es tru ctiv e as p ects of cros s ov er.
Figure 6. 1
A tree assembling
building blocks
6. 2. 1 Crossover as a Disruptive Force
C ons id er Figu re 6.1. I t may s erv e to il l u s trate wh at h ap p ens wh en
GP as s embl es good bu il d ing bl ocks into a good p rogram. We wil l
look at th e as s embl y of a good p rogram bl ock by bl ock.
Let u s f irs t as s u me th at th e d ark nod es (7-9) cons titu te a good
bu il d ing bl ock. A t th is p oint th ere are 19 cros s ov er p oints in th e ind i
v id u al in Figu re 6.1. If cros s ov er is d is tribu ted rand oml y among th es e
nod es , th e p robabil ity of ou r good bu il d ing bl ock being d is ru p ted by
cros s ov er is 2/19 or abou t 10.5%.
Now l et u s as s u me th at cros s ov er f ind s a new, good bu il d ing bl ock
containing ou r original good bl ock. Th at l arger bl ock is d es ignated
in Figu re 6.1 by th e bl ack and d ark gray nod es (nod es 611). Th e
p robabil ity th at th is new bl ock wil l be d is ru p ted by a cros s ov er ev ent
is 5/19 or 26.3%.
Now as s u me th at th e l igh t gray nod es are p art of a newl y f ou nd
good bu il d ing bl ock th at h as been as s embl ed by GP cros s ov er (nod es
1-11). Wh at h ap p ens wh en th is l arger bu t better bu il d ing bl ock
faces th e cros s ov er op erator again? Th e ans wer is s traigh tf orward .
Th e p robabil ity th at th is new bl ock wil l be d is ru p ted by a cros s ov er
ev ent is 10/19 or 52.6%.
A s th e read er can s ee, as GP becomes more and more s u cces s f u l
in as s embl ing s mal l bu il d ing bl ocks into l arger and l arger bl ocks , th e
wh ole s tru ctu re becomes more and more f ragil e becau s e it is more
p rone to being broken u p by s u bs equ ent cros s ov er. I n f act, as s u me
th at ou r bu il d ing bl ock (now, al l of th e col ored nod es ) is al mos t a
p erf ect p rogram. A l l th at need s to be d one now is to get rid of th e
cod e rep res ented by th e wh ite nod es in Figu re 6.1. Th e ind iv id u al
in Figu re 6.1 is cros s ed ov er and th e res u l ting ind iv id u al is s h own in
Figu re 6.2. Th is s ol u tion is al mos t th ere. Th ere is onl y one nod e to
get rid of bef ore th e s ol u tion is p erf ect. Bu t in th is cas e, ju s t bef ore
s u cces s , th e p robabil ity th at th e p erf ect s ol u tion wil l be d is ru p ted by
crossov er is 10/11 or 90.9%.
C ros s ov er can d amage f itnes s in ways oth er th an breaking u p
good bu il d ing bl ocks . A s s u me th at ou r good bu il d ing bl ock in Figu re
6.2 s u rv iv es cros s ov er. I t may, nev erth el es s , be mov ed into a new
ind iv id u al th at d oes not u s e th e good bu il d ing bl ock in any u s ef u l
way - in oth er word s , it may be mov ed to an inh os p itabl e context.
C ons id er th e nu mbers . If cons tru ctiv e cros s ov er occu rs between
10% and 15% of th e time, th is means th at, on av erage, a good bu il d ing
block th at is l arge mu s t be inv ol v ed in many cros s ov er ev ents bef ore
it is inv olv ed in a cros s ov er ev ent th at d oes not break it u p .
Bu t th at is not th e end of th e s tory. I n th e one ev ent wh ere th e
good bl ock is not d is ru p ted by cros s ov er, wh at are th e ch ances th at
Figure 6.2
A tree that has a/most
assembled a perfect
solution to a problem
it wil l be ins erted into anoth er ind iv id u al wh ere it is u s ed to good
effect and wh ere oth er cod e d oes not cancel ou t th e effect of th is good
bl ock? Th e ins ertion is con text depen den t.
Th e concl u s ion is inev itabl e; cros s ov er is a d is ru p tiv e f orce as
well as a cons tru ctiv e f orce - p u tting bu il d ing bl ocks togeth er and
th en tearing th em ap art. Th e bal ance is imp os s ibl e to meas u re with
tod ay's tech niqu es . I t is u nd ou bted l y a d ynamic equ il ibriu m th at
ch anges d u ring th e cou rs e of ev ol u tion. We note, h owev er, th at for
mos t ru ns , meas u red d es tru ctiv e cros s ov er rates s tay h igh u ntil th e
v ery end .
6.2.2 Reproduction and Crossover
I n s tand ard GP th e rep rod u ction op erator takes th e f ittes t ind iv id u al s
in th e p op u l ation and d u p l icates th em. Th u s , th e argu ment goes , th e
good bu il d ing bl ocks in th os e d u p l icated ind iv id u al s wil l h av e many
ch ances to try to f ind cros s ov ers th at are not d is ru p tiv e.
Th is argu ment d ep end s , of cou rs e, on th e as s u mp tion th at th e
h igh qu al ity of th e bu il d ing bl ock s h own by th e d arkened nod es in
Figu re 6.1 wil l s omeh ow be ref l ected in th e qu al ity of th e ind iv id u al
in wh ich it ap p ears . Bu t if th e nod es arou nd th e good cod e ignore it
or trans f orm it in an u naccep tabl e way, th at wil l not be th e cas e.
I t al s o d ep end s on th e bal ance between th e rep rod u ction op erator
and th e d es tru ctiv e ef f ects of cros s ov er at any giv en time in a ru n.
S ometimes good bl ocks wil l imp rov e th e f itnes s of th e ind iv id u al th ey
are in. O th er times not. S o th e bal ance between th e cons tru ctiv e and
th e d es tru ctiv e as p ects of cros s ov er is s til l th e d ominant th eme h ere.
Knowing th e correct rep rod u ction p arameter and h ow to ad ju s t it
d u ring a ru n to d eal with th e d ynamic as p ects of th is p robl em is
s ometh ing on wh ich no res earch exis ts .
A f ter th eoretical cons id erations and th is ged anken exp eriment,
ou r anal ys is is s til l inconcl u s iv e. I t is imp os s ibl e to p red ict with any
certainty yet wh eth er GP cros s ov er is onl y a macromu tation op era
tor or s ometh ing more. Th eref ore, it is time to cons id er emp irical
meas u rements of th e cros s ov er op erator.
Schema Theorem
Analysis Is Still
Inconclusive
6.3 Empirical Evidence of Crossover Effects
Two s ets of emp irical s tu d ies bear on th e effect of cros s ov er. Th e
f irs t s u gges ts th at cros s ov er normal l y res u l ts in s ev ere d amage to
th e p rograms to wh ich it is ap p l ied . Th e s econd s u gges ts th at wel l -
d es igned h il l cl imbing or s imu l ated anneal ing s ys tems , wh ich d o not
use p op u l ation-bas ed cros s ov er, are v ery comp etitiv e with GP sys
tems . We s h al l h av e a l ook at th em both in tu rn.
6.3.1 The Effect of Crossover on the Fitness
of Offspring
We began meas u ring th e effect of cros s ov er on th e rel ativ e f itnes s
of p arents and th eir of f s p ring in 1995 [Nord in and Banzh af , 1995a]
[Nord in et al ., 1995]. Th ere are two imp ortant is s u es in th is regard :
J How can we meas u re th e effect of cros s ov er?
Meas u ring th e effect of cros s ov er is not as s traigh tf orward as it
migh t s eem. Th e p robl em is th at th ere are al ways at l eas t two
p arents and one or more ch il d ren. S o GP s ys tems are nev er
meas u ring a s imp l e one-to-one rel ations h ip .
Q Likewis e, it is not entirel y cl ear wh at s h ou l d be meas u red .
Figu re 6.3 s h ows a grap h of th e effect of cros s ov er on f itnes s of
of f s p ring d u ring th e cou rs e of a ru n in s ymbol ic regres s ion in
l inear GP. Fitnes s ch ange A /
p e r c e n t
is d ef ined as
(6.2)
Figure 6.3
Effects of crossover are of
different kinds
with /before f itnes s bef ore cros s ov er and f
a
jter af ter cros s ov er
u nd er th e as s u mp tion of a s tand ard ized f itnes s f u nction, fb
eat
=
0, fworst 00-
I nd iv id u al s with a f itnes s d ecreas e of more th an 100% are accu
mu l ated at th e lef t s id e. Note th at th rou gh ou t training, th ere
are two d ominant f orms of cros s ov er - v ery d es tru ctiv e cros s ov er
(l ef t) and neu tral cros s ov er (mid d l e). Th ere is al s o a low lev el
of cons tru ctiv e cros s ov er. A l th ou gh it is p os s ibl e to meas u re
p os itiv e and negativ e cros s ov er ef f ects exactl y, we h av e fou nd
it benef icial to d o categorizing meas u rements . A s u bs tantial
amou nt of inf ormation may be gl eaned al read y from meas u ring
neu tral cros s ov er as a s ep arate category.
1
Two bas ic ap p roach es to meas u ring th e effect of cros s ov er h av e
been u s ed in th e l iteratu re:
Th e av erage f itnes s of al l p arents h as been comp ared with th e
av erage f itnes s of al l of f s p ring [Nord in and Banzh af , 1995a].
Note th at th e effect of th is is th at both p arents and of f s p ring
are cou nted as on e cros s ov er ev ent. Th u s no s p ecial cas es , like
2 p arents and 3 ch il d ren v ers u s 3 p arents and 2 ch il d ren, need
to be treated s ep aratel y.
1
Neu tral crossov er in exis ting s tu d ies h as been d efined as any crossover
ev ent wh ere th e f itnes s of th e ch ild ren is with in 2.5% of th e f itnes s of
th e p arents .
Q Th e f itnes s of ch il d ren and p arents is comp ared on an ind iv id u al
bas is [Tel l er, 1996] [Francone et al ., 1996]. I n th is ap p roach ,
one ch il d is as s igned to one p arent.
Th eref ore, each s u ch p airing is cou nted as one cros s ov er ev ent.
I n th is cas e, a f u rth er s p ecial ization is neces s ary. Do we com
p are of f s p ring to th e bes t or wors t p arent? Do we comp are
th em one by one (onl y p os s ibl e if nu mbers are equ al )?
Regard l es s h ow th e meas u rement is cond u cted , it is imp ortant to
s ep arate d es tru ctiv e, neu tral , and cons tru ctiv e cros s ov er and to pro
v id e a s ep arate meas u rement for each . Th e res u l ting meas u rements
are v ery inf ormativ e no matter wh at tech niqu e is u s ed for meas u re
ment.
Th e effect of cros s ov er h as been meas u red for tree-bas ed GP, lin
ear (mach ine cod e) GP [Nord in and Banzh af , 1995a], and grap h GP
[Teller, 1996]. I n al l th ree cas es , cros s ov er h as an ov erwh el mingl y
n egative effect on th e f itnes s of th e of f s p ring of th e cros s ov er. For ex
amp l e, in l inear genomes , th e f itnes s of th e ch il d ren is l es s th an h al f
th e f itnes s of th e p arents in abou t 75% of al l cros s ov er ev ents . Simi
lar meas u rements ap p l y to tree-bas ed cros s ov er [Nord in et al ., 1996].
Recently, Tel l er h as meas u red s imil ar f igu res for cros s ov er in th e
grap h -bas ed s ys tem PA DO . A l th ou gh h is meas u rements were not
p recis ely equ iv al ent to th e tree and l inear meas u rements of cross
over cited abov e, h is f ind ings are qu ite cons is tent - l es s th an 10%
of cros s ov er ev ents in grap h -bas ed GP res u l t in an imp rov ement in
th e f itnes s of of f s p ring rel ativ e to th eir p arents . Note th at th es e are
global nu mbers ov er entire ru ns . Th ere is certainl y a ch ange ov er th e
cou rs e of a ru n th at cannot be ref l ected in th es e nu mbers at al l .
Wh at is remarkabl e is th at th ree v ery d if f erent ways of meas u ring
crossov er on th ree comp l etel y d if f erent rep res entations h av e yiel d ed
such s imil ar res u l ts . Th e concl u s ion is comp el l ing: cros s ov er rou tinel y
red u ces th e f itnes s of of f s p ring s u bs tantial l y rel ativ e to th eir p arents
in al mos t ev ery GP s ys tem. Th is s tand s in s tark contras t to biol ogical
cros s ov er.
The Results of
Measuring the Effect of
Crossover
6.3.2 The Relative Merits of Program Induction via
Crossover versus Hill Climbing or Annealing
Lang [Lang, 1995] l au nch ed a controv ers ial attack on GP cros s ov er
in 1995. Lang's s tu d y argu ed th at cros s ov er in a p op u l ation d id not
p erf orm nearl y as wel l as a macromu tation op erator th at h as been
wh ims ical l y d u bbed headless chicken crossover.
I n h ead l es s ch icken cros s ov er, on ly on e p arent is s el ected from
p reexis ting l earned s ol u tions . A n entirel y new ind iv id u al is created
Headless Chicken
Crossover
rand oml y. Th e s el ected p arent is th en cros s ed ov er with th e new
and rand oml y created ind iv id u al . Th e of f s p ring is kep t if it is better
th an or equ al to th e p arent in f itnes s . O th erwis e, it is d is card ed .
Th u s , h ead l es s ch icken cros s ov er is a f orm of h il l cl imbing. I n one
genetic al gorith m s tu d y, h ead l es s ch icken cros s ov er s l igh tl y ou tp er
f ormed both trad itional genetic al gorith ms and h il l cl imbing u s ing
bit-f l ip p ing mu tations [Jones , 1995].
Lang's s tu d y went cons id erabl y f u rth er in its concl u s ion. Lang
argu ed th at h ead l es s ch icken cros s ov er was much better th an GP
cros s ov er. Howev er, h is s tu d y was bas ed on one s mal l p robl em (3-
argu ment Bool ean f u nctions ) and th e broad interp retation of h is lim
ited res u l ts is d u biou s [O 'Reil l y, 1995].
Lang's res u l ts are of qu es tionabl e u s ef u l nes s becau s e of th e s ingl e
p robl em h e ch os e to s h ow th at h il l cl imbing ou tp erf ormed genetic
p rogramming. E v ery mach ine l earning tech niqu e h as a bias - a ten
d ency to p erf orm better on certain typ es of p robl ems th an on oth ers .
Lang p icked onl y one tes t p robl em, th e Bool ean 3-mu l tip l exer p rob
l em. Bool ean mu l tip l exer p robl ems h av e th e p rop erty th at th ere are
no s trict l ocal minima. Th at is [Ju el s and Wattenberg, 1995]:
... from any p oint in th e s earch s p ace, th e grap h d enning th e
neigh borh ood s tru ctu re contains a p ath to s ome op timal s ol u tion
s u ch th at ev ery trans ition in th e p ath l ead s to a s tate with an
equ al or greater f itnes s . A . JUE LS AND M. WA TTE NBE RG, 1995
I n oth er word s , Bool ean mu l tip l exer p robl ems l ike th e s imp l e one
Lang u s ed are wel l s u ited to be s ol v ed by h il l cl imbing al gorith ms
l ike h ead l es s ch icken cros s ov er. Th at is , th e bias of a h il l cl imbing
al gorith m is p articu l arl y well s u ited to s ol v ing Bool ean mu l tip l exer
p robl ems .
Howev er, oth er more th orou gh s tu d ies h av e rais ed s ignif icant
qu es tions abou t wh eth er th e cros s ov er op erator may be s aid to be
better th an mu tation-oriented tech niqu es . O ne s et of th os e s tu d ies is
d is cu s s ed abov e - cros s ov er is h igh l y d es tru ctiv e to of f s p ring. O th er
s tu d ies s u gges t th at mu tation tech niqu es may p erf orm as well as and
s ometimes s l igh tl y better th an trad itional GP cros s ov er.
For examp l e, O 'Reil l y meas u red GP cros s ov er agains t s ev eral
oth er p rogram ind u ction al gorith ms th at d id not rel y on p op u l ation-
bas ed cros s ov er. Two were of p articu l ar interes t to h er, mu tate-
s imu l ated anneal ing and cros s ov er-h il l cl imbing. E ach al gorith m
s tarts with a cu rrent s ol u tion. Th is is th en ch anged to generate a
new s ol u tion. For examp l e, th e cros s ov er-h il l cl imbing al gorith m
ch anges th e cu rrent cand id ate s ol u tion by cros s ing it ov er with a ran
d oml y generated p rogram, a f orm of h ead l es s ch icken cros s ov er. If
Crossover vs.
Non- Popula tion- Based
Operators
th e new s ol u tion h as h igh er f itnes s , it rep l aces th e original s ol u tion.
2
If th e new s ol u tion h as lower f itnes s , it is d is card ed in cros s ov er-h il l
climbing bu t kep t p robabil is tical l y in mu tate-s imu l ated anneal ing.
O 'Reil l y f ou nd [O 'Reil l y and O p p ach er, 1994a] th at th e mu tate-
s imu l ated anneal ing and cros s ov er-h il l cl imbing al gorith ms p erf ormed
as well as or s l igh tl y better th an s tand ard GP on a tes t s u ite of s ix
d ifferent p robl ems ; s ee al s o [O 'Reil l y and O p p ach er, 1995a].
I n anoth er recent s tu d y, O 'Reil l y extend ed h er res u l ts by com
p aring GP with oth er op erators , mos t notabl y a h ierarch ical v ariabl e
l ength mu tation, wh ich is an op erator exp l icitl y cons tru cted for keep
ing d is tances between p arent and of f s p ring l ow.
3
S h e concl u d ed th at
cros s ov er s eems to create ch il d ren with l arge s yntactic d if f erences be
tween p arents and of f s p ring, at l eas t rel ativ e to of f s p ring generated
by h ierarch ical v ariabl e l ength mu tation. Th is ad d s weigh t to th e
cros s ov er-is -macromu tation th eory.
More recentl y, A ngel ine tes ted p op u l ation-bas ed and s el ection-
d riv en h ead l es s ch icken cros s ov er agains t s tand ard GP s u btree cross
over (s ee C h ap ters 5 and 9). He comp ared th e two typ es of op erators
over th ree d if f erent p robl em s ets . His concl u s ion: macromu tation of
s u btrees (h ead l es s ch icken cros s ov er in GP) p rod u ces res u l ts th at are
abou t th e s ame or p os s ibl y a l ittl e better th an s tand ard GP s u btree
cros s ov er [A ngel ine, 1997].
6.3.3 Conclusions about Crossover as Macromutation
Th e emp irical ev id ence l end s l ittl e cred ence to th e notion th at tra
d itional GP cros s ov er is , s omeh ow, a more ef f icient or better s earch
op erator th an mu tation-bas ed tech niqu es . O n th e oth er h and , th ere
is no s eriou s s u p p ort for Lang's concl u s ion th at h il l cl imbing ou tp er
forms GP. O n th e s tate of th e ev id ence as it exis ts tod ay, one mu s t
concl u d e th at trad itional GP cros s ov er acts p rimaril y as a macromu
tation op erator.
Th at s aid , s ev eral cav eats s h ou l d be mentioned bef ore th e cas e
on cros s ov er may be cl os ed . To begin with , one cou l d eas il y concl u d e
th at trad itional GP cros s ov er is an excel l ent s earch op erator as is .
Wh at is remarkabl e abou t GP cros s ov er is th at, al th ou gh it is l eth al to
th e of f s p ring ov er 75% of th e time, s tand ard GP nev erth el es s p erf orms
as well as or al mos t as well as tech niqu es bas ed on l ong es tabl is h ed
and s u cces s f u l al gorith ms s u ch as s imu l ated anneal ing.
2
I n ev ol u tionary s trategies , th is is known as a (1 + 1) s trategy.
3
Th is , of cou rs e, requ ires a meas u re of d is tance in trees , wh ich
O 'Reil l y took f rom [S ankof f and Kru s kal , 1983]. Th e s ame meas u re was
u sed earl ier in connection with th e meas u rement of d iv ers ity in GP
[Keller and Banzh af , 1994].
Fu rth ermore, th e f ail u re of th e s tand ard GP cros s ov er op erator
to imp rov e on th e v ariou s mu tation op erators d is cu s s ed abov e may
be d u e to th e s tagnation of GP ru ns th at occu rs as a res u l t of wh at
is ref erred to as "bl oat" - in oth er word s , th e exp onential growth of
GP "introns ." I n C h ap ter 7, we wil l d is cu s s th e exp onential growth
of GP introns at s ome l ength . O ne of ou r concl u s ions th ere wil l be
th at th e d es tru ctiv e effect of s tand ard GP cros s ov er is th e p rincip al
s u s p ect as th e cau s e of th e GP bl oating ef f ect. By way of contras t,
th e s tu d ies comp aring cros s ov er and macromu tation op erators u s e
macromu tation op erators th at are mu ch l es s l ikel y to cau s e bl oat
th an s tand ard s u btree cros s ov er. S o it may be th at by av oid ing or
p os tp oning bl oat, macromu tation p ermits a GP ru n to l as t l onger
and , th eref ore, to engage in a more extens iv e exp l oration of th e s earch
s p ace [Banzh af et al ., 1996].
Final l y, th e ev id ence s u gges ts th ere may be room for s u bs tantial
imp rov ement of th e cros s ov er op erator. C ros s ov er p erf orms qu ite well
ev en giv en its h igh l y d is ru p tiv e effect on of f s p ring. If it were p os s ibl e
to mitigate th at d is ru p tiv e effect to s ome d egree, cros s ov er wou l d
l ikel y p erf orm a f as ter and more ef f ectiv e s earch . A reexamination
of th e anal ogy between biol ogical cros s ov er and GP cros s ov er and
s ev eral recent s tu d ies on cros s ov er s u gges t v ariou s d irections for s u ch
imp rov ements in cros s ov er.
6.4 Improving Crossover - The Argument
from Biology
A l th ou gh th ere are many d if f erences between th e GP cros s ov er op
erator and biol ogical cros s ov er in s exu al rep rod u ction, one d if f erence
s tand s ou t from al l oth ers . To wit, biol ogical cros s ov er works in
a h igh l y cons trained and h igh l y control l ed context th at h as ev ol v ed
ov er bil l ions of years . Pu t anoth er way, cros s ov er in natu re is its el f an
ev ol v ed op erator. I n A l tenberg's terms [A l tenberg, 1994b], cros s ov er
may be s een as th e res u l t of th e ev ol u tion of ev ol v abil ity.
Th ere are th ree p rincip al cons traints on biol ogical cros s ov er:
1. Biol ogical cros s ov er takes p l ace onl y between members of th e
same s p ecies . I n f act, l iv ing creatu res p u t mu ch energy into
id entif ying oth er members of th eir s p ecies - of ten p u tting th eir
own s u rv iv al at ris k to d o s o. Bird s ongs , for examp l e, attract
mates of th e s ame s p ecies . . . and p red ators . Res tricting
mating to intras p ecies mating and h av ing a h igh p ercentage of
v iabl e of f s p ring mu s t be v ery imp ortant in natu re.
2. Biol ogical cros s ov er occu rs with remarkabl e attention to p re
s erv ation of "s emantics ." Th u s , cros s ov er u s u al l y res u l ts in th e
s ame gene from th e f ath er being match ed with th e s ame gene
from th e moth er. I n oth er word s , th e h air col or gene d oes not
get s wap p ed for th e tal l nes s gene.
3. Biol ogical cros s ov er is homologous. Th e two DNA s trand s are
abl e to l ine u p id entical or v ery s imil ar bas e p air s equ ences
s o th at th eir cros s ov er is accu rate (u s u al l y) al mos t d own to th e
mol ecu l ar l ev el . Bu t th is d oes not excl u d e cros s ov er at d u p l icate
gene s ites or oth er v ariations , as l ong as v ery s imil ar s equ ences
are av ail abl e.
I n natu re, mos t cros s ov er ev ents are s u cces s f u l - th at is , th ey
res u l t in v iabl e of f s p ring. Th is is a s h arp contras t to GP cros s ov er,
wh ere ov er 75% of th e cros s ov er ev ents are wh at wou l d be termed in
biology "l eth al ."
Wh at cau s es th is d if f erence? I n a s ens e, GP takes on an enormou s
ch ore. I t mu s t ev ol v e genes (bu il d ing bl ocks ) s o th at cros s ov er makes
s ens e an d it mu s t ev ol v e a s ol u tion to th e p robl em al l in a few h u nd red
generations . I t took natu re bil l ions of years to come u p with th e
p recond itions s o th at cros s ov er its el f cou l d ev ol v e.
GP cros s ov er is v ery d if f erent from biol ogical cros s ov er. C ros s ov er
in s tand ard GP is u ncons trained and u ncontrol l ed . C ros s ov er p oints
are s el ected rand oml y in both p arents . Th ere are no p red ef ined bu ild
ing bl ocks (genes ). C ros s ov er is exp ected to f ind th e good bu il d ing
blocks and not to d is ru p t th em ev en wh il e th e bu il d ing bl ocks grow.
Let's l ook more cl os el y at th e d etail s :
Q I n th e bas ic GP s ys tem, any s u btree may be cros s ed ov er with
any oth er s u btree. Th ere is no requ irement th at th e two su b
trees fu lfill s imil ar f u nctions . I n biol ogy, becau s e of h omol -
ogy, th e d if f erent al l el es of th e s wap p ed genes make onl y minor
ch anges in th e s ame bas ic f u nction.
Q Th ere is no requ irement th at a s u btree, af ter being s wap p ed , is
in a context in th e new ind iv id u al th at h as any rel ation to th e
context in th e ol d ind iv id u al . I n biol ogy, th e genes s wap p ed are
s wap p ed with th e corres p ond ing gene in th e oth er p arent.
Q Were GP to d ev el op a good s u btree bu il d ing bl ock, it wou l d be
v ery l ikel y to be d is ru p ted by cros s ov er rath er th an p res erv ed
and s p read . I n biol ogy, cros s ov er h ap p ens mos tl y between sim
il ar genetic material . I t takes p l ace s o as to p res erv e gene func
tion with onl y minor ch anges .
G Th ere is no reas on to s u p p os e th at rand oml y initial ized ind i
v id u al s in a GP p op u l ation are members of th e s ame s p ecies -
th ey are created rand oml y.
Giv en th es e d if f erences , wh y s h ou l d we exp ect cros s ov er among
GP ind iv id u al s to h av e anyth ing l ike th e effect of biol ogical cros s ov er?
I nd eed , cros s ing ov er two p rograms is a l ittl e l ike taking two h igh l y
f it word p roces s ing p rograms , Word for Wind ows and Word Perf ect,
cu tting th e execu tabl es in h al f and s wap p ing th e two cu t s egments .
Wou l d anyone exp ect th is to work? O f cou rs e not. Yet th e ind is -
p u tibl e f act is th at cros s ov er h as p rod u ced s ome remarkabl e res u l ts .
S o each d if f erence between biol ogical and GP cros s ov er s h ou l d be re
gard ed as a p os s ibl e way to imp rov e GP cros s ov er - s ome of wh ich ,
as we wil l s ee bel ow, h av e al read y been imp l emented .
6.5 Improving Crossover New Directions
O u r critiqu e of cros s ov er s u gges ts areas in wh ich th e cros s ov er oper
ator migh t be imp rov ed . We regard th e mos t bas ic and p romis ing
ap p roach to be mod if ication of GP cros s ov er s o th at it acts more like
h omol ogou s cros s ov er in natu re. Natu re h as gone to great l ength s to
av oid macromu tation in cros s ov er (s ee C h ap ter 2). Th ere is l ikel y to
be a reas on for th e energy natu re d ev otes to av oid ing macromu tation.
We s u bmit, th eref ore, th at h omol ogy s h ou l d be th e central is s u e in
red ef ining th e cros s ov er op erator.
Howev er, mos t of th e ef f orts to imp rov e cros s ov er to d ate h av e
f ocu s s ed on th e p res erv ation of bu il d ing bl ocks , not th e p res erv a
tion of h omol ogy. S ome of th os e ef f orts h av e been s u cces s f u l , oth ers
h av e intrigu ing emp irical imp l ications regard ing th e bu il d ing bl ock
h yp oth es is , and oth ers rep res ent a f irs t l ook by th e GP commu nity
at th e is s u e of h omol ogy. Th e remaind er of th is s ection wil l l ook at
th es e s tu d ies .
6.5.1 Brood Recombination
Drawing on work by A l tenberg [A l tenberg, 1994a], Tackett d ev is ed a
meth od for red u cing th e d es tru ctiv e effect of th e cros s ov er op erator
cal l ed brood recombination [Tackett, 1994]. Tackett attemp ted to
mod el th e obs erv ed f act th at many animal s p ecies p rod u ce f ar more
of f s p ring th an are exp ected to l iv e. A l th ou gh th ere are many d if f erent
mech anis ms , th e exces s of f s p ring d ie. Th is is a h ard bu t ef f ectiv e way
to cu l l ou t th e res u l ts of bad cros s ov er.
Tackett created a "brood " each time cros s ov er was p erf ormed .
O ne of th e key p arameters of h is s ys tem was a p arameter cal l ed brood
Figure 6.4
Brood recombination
illustrated
size N. Figu re 6.4 s h ows th e creation and ev al u ation of a brood wh ere
N = 4, wh ich took p l ace in th e f ol l owing s tep s :
1. Pick two p arents f rom th e p op u l ation.
2. Perf orm rand om cros s ov er on th e p arents AT times , each time
creating a p air of ch il d ren as a res u l t of cros s ov er. I n th is cas e
th ere are eigh t ch il d ren res u l ting f rom N = 4 cros s ov er op era
tions .
3. E v al u ate each of th e ch il d ren for f itnes s . S ort th em by f itnes s .
S el ect th e bes t two. Th ey are cons id ered th e ch il d ren of th e
p arents . Th e remaind er of th e ch il d ren are d is card ed .
Th ere is one big p robl em with th is ap p roach . GP is u s u al l y slow
in p erf orming ev al u ations . I ns tead of h av ing two ch il d ren to ev alu
ate, as in s tand ard cros s ov er, brood recombination ap p ears to make
Time-Saving Evaluation
Methods
Is Brood
Recombination
Effective?
it neces s ary to ev al u ate 27V ch il d ren. Wil l th is not slow d own GP
tremend ou s l y? Th e ans wer is no, becau s e of a cl ev er ap p roach A l -
tenberg and Tackett take to ev al u ation. Tackett reas ons th at it is onl y
imp ortant th at th e s el ection on th e brood s el ects ch il d ren th at are
"in th e bal l p ark" - not th at th ey are certainl y th e bes t of th e brood .
S o h e ev al u ates th em on onl y a s mal l p ortion of th e training s et. Be
cau s e th e entire brood is th e of f s p ring of one s et of p arents , s el ection
among th e brood members is s el ecting for ef f ectiv e cros s ov ers - good
recombinations .
Brood recombination is s imil ar to E S -s tyl e s el ection (s ee S ection
4.3.2). Th ere, immed iatel y af ter ap p l ying th e genetic op erators to
H p arents , a s el ection s tep ch oos es th e bes t of f s p ring. Howev er, th e
nu mber of of f s p ring in (//, A) s el ection, A, is greater th an //, wh ereas
in brood recombination th e nu mber of of f s p ring is an integer mu l tip l e
of /x.
4
I n C h ap ter 1 we l ooked at GP as a typ e of beam s earch . Th e
beam is th e p op u l ation. Viewed anoth er way, th e beam is th e genetic
material in th e p op u l ation, not ju s t th e ind iv id u al s . I n th is l igh t,
cros s ov er combined with s el ection cou l d be v iewed as p art of th e
ev al u ation metric to s el ect genetic material f rom th e beam as th e next
s earch p oint. Brood recombination wou l d th en be a d is criminating
ad d ition to th e ev al u ation metric for th e beam.
Howev er we v iew it, we wou l d exp ect brood recombination to
be l es s d is ru p tiv e to good bu il d ing bl ocks th an ord inary cros s ov er
becau s e th e ch il d ren of d es tru ctiv e cros s ov er ev ents wou l d tend to be
d is card ed wh en th e brood is ev al u ated . Th eref ore, we wou l d p red ict
th at GP cou l d bu il d l arger bu il d ing bl ocks with brood recombination
bef ore d is ru p tiv e f orces began to break th em u p . Th at being th e
cas e, we wou l d exp ect GP with brood recombination to s earch for
s ol u tions more ef f icientl y th an regu l ar GP. Th at is , for each u nit of
C PU time, brood recombination s h ou l d p rod u ce a better res u l t.
I n f act, th at is exactl y wh at h ap p ened . Tackett f ou nd th at brood
recombination p erf ormed s ignif icantl y better th an s tand ard GP on
a s u ite of p robl ems . I nd eed , h e f ou nd th at th ere was onl y a s mal l
red u ction in p erf ormance by u s ing 30 ou t of th e 360 training ins tances
to ev al u ate th e brood . I n al l cas es meas u red , th e res u l ts ach iev ed by
p articu l ar amou nts of comp u tation and d iv ers ity in th e p op u l ation
4
Th e trick of not u s ing al l f itnes s cas es f or p rogram ev al u ation h as
been ap p l ied s u cces s f u lly comp l etel y ind ep end ent of brood recombination.
Gath ercol e u s ed th is tech niqu e in 1994 [Gath ercol e and Ros s , 1994]. We
ref er to th e tech niqu e as "s toch as tic s amp l ing" becau s e it u s es a s toch as ti
cal l y s el ected s u bs et of al l th e training cas es . I n an extreme cas e, s toch as tic
s amp l ing can be u s ed to train a p op u l ation on onl y a s ingl e member from
th e training s et at a time[Nord in and Banzh af , 1995c].
both imp rov ed wh en brood recombination was ad d ed . He al s o f ou nd
th at it was p os s ibl e to red u ce th e p op u l ation s ize wh en h e u s ed brood
recombination.
Brood recombination rais es two interes ting qu es tions . Does brood
recombination work by n ot d is ru p ting bu il d ing bl ocks or by ad d ing
a d if f erent f orm of s earch p roces s to th e GP al gorith m - in mach ine
l earning terms , giv ing th e GP al gorith m th e abil ity to l ook ah ead
wh en ad ju s ting th e beam? Tackett's res u l ts may be regard ed as con
s is tent with eith er p remis e.
A ll th at we wou l d exp ect th e brood recombination op erator to
d o is to ch ange th e bal ance between d es tru ctiv e cros s ov er and con
s tru ctiv e cros s ov er. I n s h ort, we wou l d p red ict th at, with brood re
combination, GP wou l d be abl e to maintain l arger bu il d ing bl ocks
agains t d es tru ctiv e cros s ov er. E v entu al l y, as th e bu il d ing bl ocks got
l arger, th e p robabil ity of d es tru ctiv e cros s ov er wou l d increas e and we
wou ld p red ict th at bl oat wou l d s et in to p rotect th e l arger bu il d ing
bl ocks . Th is s u gges ts th at a d ynamic f orm of brood recombination,
wh ere th e s ize of th e brood grows as ev ol u tion p roceed s , may yiel d
bes t res u l ts .
6.5.2 "Intelligent" Crossover
Recentl y, res earch ers h av e attemp ted to ad d intel l igence to th e cross
ov er op erator by l etting it s el ect th e cros s ov er p oints in a way th at
is les s d es tru ctiv e to th e of f s p ring.
Th e PA DO s ys tem was d is cu s s ed (S ection 5.2.3) as a p rototyp ic
grap h -bas ed GP s ys tem. S imp l e cros s ov er in GP s ys tems is rath er
s traigh tf orward . Bu t it is f ar from obv iou s h ow to cau s e intel l igent
cros s ov er, es p ecial l y in a grap h GP s ys tem. Tel l er h as d ev is ed a
comp lex bu t s u rp ris ingl y ef f ectiv e tech niqu e for imp rov ing th e rate
of cons tru ctiv e cros s ov er in PA DO by l etting an intel l igent cros s ov er
op erator learn h ow to s el ect good cros s ov er p oints . Tel l er giv es h is in
tel l igent cros s ov er op erator acces s to inf ormation abou t th e execu tion
p ath in an ev ol v ed p rogram, among oth er th ings . Th is inf ormation is
th en u s ed to gu id e cros s ov er [Teller and Vel os o, 1995b] [Tel l er, 1996].
Tel l er's intel l igent recombination op erator s ignif icantl y imp rov ed
th e p erf ormance of trad itional GP cros s ov er. Th e p ercentage of re
combination ev ents th at res u l ted in of f s p ring better th an th e p arents
ap p roximatel y d ou bl ed . Zannoni u s ed a cu l tu ral al gorith m (a more
trad itional mach ine l earning al gorith m) to s el ect cros s ov er p oints
with s imil ar res u l ts [Zannoni and Reynol d s , 1996].
I ba [I ba and d e Garis , 1996] h as p rop os ed a f orm of intel l igent
h eu ris tic gu id ance for th e GP cros s ov er op erator. I ba comp u tes a s o-
called p erf ormance v al u e for s u btrees . Th e p erf ormance v al u e is u s ed
A Crossover Operator
That Learns
A Crossover Operator
Guided by Heuristics
to d ecid e wh ich s u btrees are p otential bu il d ing bl ocks to be ins erted
into oth er trees , and wh ich s u btrees are to be rep l aced . Th is h eu ris tic
recombinativ e gu id ance imp rov es th e effect of cros s ov er s u bs tantial l y.
Th es e res u l ts are qu ite cons is tent with th e bu il d ing bl ock th eory.
Th e intel l igent op erators d is cu s s ed h ere obv iou s l y f ou nd regularities
in th e p rogram s tru ctu res of v ery d if f erent GP s ys tems and d ev is ed
ru l es to exp l oit th os e regu l arities . A s a res u l t, th e s ys tems were
abl e to ch oos e better cros s ov er s ites th an s ys tems bas ed on s tand ard
GP cros s ov er, wh ich ch oos es cros s ov er s ites rand oml y. Th es e s tu d ies
th eref ore s u gges t th at in GP:
Q Th ere are bl ocks of cod e th at are bes t left togeth er - p erh ap s
th es e are bu il d ing bl ocks .
Q Th es e bl ocks of cod e h av e ch aracteris tics th at can be id entif ied
by h eu ris tics or a l earning al gorith m.
Q GP p rod u ces h igh er cons tru ctiv e cros s ov er rates and better re
s u l ts wh en th es e bl ocks of cod e are p robabil is tical l y kep t to
geth er.
Th es e p oints are not a s tatement of th e bu il d ing bl ock h yp oth es is
in its s trong f orm - th ey d o not p rov e th at th e bl ocks of cod e are as
s embl ed into better combinations . Howev er, th e p oints are certainl y
s trong s u p p ort for a weak bu il d ing bl ock h yp oth es is , namel y, th at
th ere are bl ocks of cod e ev ol v ed in GP th at are bes t not d is ru p ted .
Both of th e abov e tech niqu es , brood recombination and s mart
cros s ov er, attack th e cros s ov er p robl em as a bl ack box. I n es s ence,
th ey take th e p os ition th at it d oes not matter h ow you get better
cros s ov er. Wh at is imp ortant is to imp rov e th e f inal ov eral l res u l t.
Th e next few tech niqu es we wil l d is cu s s are bas ed on attemp ting to
mod el biol ogical cros s ov er s o th at better res u l ts f rom cros s ov er will
emerge f rom th e ev ol u tionary p roces s its el f . A l th ou gh th e res u l ts of
th is ap p roach to d ate are l es s imp res s iv e th an brood recombination
and s mart cros s ov er in th e s h ort ru n, th ey may h ol d th e mos t p romis e
in th e l ong ru n.
6.5.3 Context-Sensitive Crossover
D'h aes el eer [D'h aes el eer, 1994] took an emergent ap p roach to imp rov
ing cros s ov er. His work was bas ed on th e id ea th at mos t cros s ov er
d oes not p res erv e th e context of th e cod e - yet context is cru cial to
th e meaning of comp u ter cod e. He d ev is ed an op erator cal l ed s trong
context p res erv ing cros s ov er (S C PC ) th at onl y p ermitted cros s ov er
between nod es th at occu p ied exactl y th e s ame p os ition in th e two
p arents . D'h aes el eer f ou nd mod es t imp rov ements in res u l ts by mix
ing regu l ar cros s ov er and S C PC .
I n a way, th is ap p roach introd u ced an el ement of h omol ogy into
th e cros s ov er op erator. I t is not s trong h omol ogy as in th e biol ogical
examp l e, bu t requ iring cros s ov er to s wap between trees at id entical
l ocations is s omewh at h omol ogou s .
6.5.4 Explicit Multiple Gene Systems
E v ol u tion in natu re s eems to p roceed by making s mal l imp rov ements
on exis ting s ol u tions . O ne of th e mos t ambitiou s attemp ts to create
an emergent s ys tem in wh ich cros s ov er is more ef f ectiv e is A l tenberg's
cons tru ctional s el ection s ys tem [A l tenberg, 1995]. He p rop os es a sys
tem in wh ich f itnes s comp onents are af f ected by al l or s ome of th e
genes . A l tenberg's s ys tem is h igh l y th eoretical becau s e th e f itnes s of
th e ind iv id u al is ju s t th e s u m of th e f itnes s comp onents . Figu re 6.5
is a s tyl ized d iagram of th e s ys tem.
Figure 6.5
Altenberg's
constructional selection
in operation (adopted
from [Altenberg, 1995])
Du ring ev ol u tion, a gene is p eriod ical l y ad d ed . If it imp rov es th e
fitness of th e ind iv id u al , it is kep t; oth erwis e, it is d is card ed . Between
gene ad d itions , th e p op u l ation ev ol v es by in tergen e cros s ov er. Hav ing
mu l tip l e f itnes s f u nctions al l ows th e genes to be more ind ep end ent or,
in biol ogical terms , to be l es s ep is tatic. A l tenberg's res u l ts s u gges t
th at th e p op u l ation maintains its ev ol v abil ity becau s e of th e s el ection
wh en ad d ing a new gene. A l s o, h is res u l ts cl earl y s u gges t th at th e
s ys tem is l es s ep is tatic with cons tru ctional s el ection.
A l tenberg's work was extend ed and ap p l ied to real -worl d mod el
ing of ind u s trial p roces s es by Hiiich lif f e [Hinch liffe et al ., 1996], wh o
used mu l tip l e trees to create a mu l tip l e gene mod el .
Let T rep res ent th e ou tp u t of a GP tree. Hinch l if f e's mod el cal - Using Regression
wh ere T1, T2, . . . , T
n
are ou tp u ts of s ep arate trees wh ich are h is genes .
Hinch lif f e cal cu l ates th e p arameters a,b,c,... ,n u s ing p s eu d o-inv ers e
l inear regres s ion. Th ere is , in a s ens e, a h il l cl imbing s tep between th e
GP res u l ts and th e cal cu l ation of th e ou tp u t. Th e l inear regres s ion
tend s to red u ce th e imp act of negativ e cros s ov er by as s igning h igh er
v al u es to trees th at are h igh l y correl ated with th e actu al ou tp u t.
I n th is mu l tip l e gene s ys tem, cros s ov er occu rs in two ways :
Q A s h igh -l ev el cros s ov er. O nl y T^s wou l d be exch anged with T;s
in th e oth er ind iv id u al .
Q A s l ow-l ev el cros s ov er. S u bexp res s ions may be exch anged from
anywh ere in eith er p arent.
Th is al gorith m cl earl y ou tp erf ormed s tand ard GP. I t is u ncl ear,
h owev er, wh eth er th e mu l tip l e gene s tru ctu re or th e ad d ition of h il l
cl imbing was th e cau s e of th e imp rov ed p erf ormance. Nev erth el es s ,
Hinch l if f e's h igh -l ev el cros s ov er op erator bears a s trong res embl ance
to bas e-p air match ing in biol ogical h omol ogou s cros s ov er.
6.5.5 Explicitly Defined Introns
Recentl y, we introd u ced exp l icitl y d enned introns (E DI ) into GP.
5
A n
integer v al u e is s tored between ev ery two nod es in th e GP ind iv id
u al . Th is integer v al u e is ref erred to as th e E DI v al u e (E DI V). Th e
cros s ov er op erator is ch anged s o th at th e p robabil ity th at cros s ov er
occu rs between any two nod es in th e GP p rogram is p rop ortional
to th e integer v al u e between th e nod es . Th at is , th e E DI V integer
v al u e s trongl y inf l u ences th e cros s ov er s ites ch os en by th e mod if ied
GP al gorith m d u ring cros s ov er [Nord in et al ., 1996].
Th e id ea beh ind E DI Vs was to al l ow th e E DI V v ector to ev olv e
d u ring th e GP ru n to id entif y th e bu il d ing bl ocks in th e ind iv id u al
as an emergen t p h enomenon. Natu re may h av e managed to id entif y
genes and to p rotect th em agains t cros s ov er in a s imil ar manner.
Perh ap s if we gav e th e GP al gorith m th e tool s to d o th e s ame th ing,
GP, too, wou l d l earn h ow to id entif y and p rotect th e bu il d ing bl ocks .
If s o, we wou l d p red ict th at th e E DI V v al u es with in a good bu il d ing
bl ock s h ou l d become low and , ou ts id e th e good bl ock, h igh . O u r
res u l ts were mod es tl y p os itiv e in l inear genomes and inconcl u s iv e in
tree-bas ed genomes .
5
Wh y we u s ed th e term in tron will become cl ear in th e next ch ap ter.
cu l ates its ou tp u t as f ollows :
(6.3)
Des p ite ou r mod es t res u l ts [Nord in et al ., 1995], th e E DI tech
niqu e s eems to be a p romis ing d irection for GP res earch . E mergent
l earning is p owerf u l and , if d es igned p rop erl y, p ermits l earning th at
reflects as few of th e bias es of th e u s er as p os s ibl e.
A ngel ine d ev is ed a mu ch better imp l ementation of E DI s in 1996
u s ing real -v al u ed E DI Vs and cons training ch anges in th e E DI Vs by a
Gau s s ian d is tribu tion of p ermis s ibl e mu tation to th e E DI Vs
[A ngeline, 1996]. Th e res u l t of ap p l ying th is new f orm of E DI s to
GP cros s ov er was a s u bs tantial imp rov ement in GP p erf ormance.
Th e concl u s ion th at may be d rawn abou t cros s ov er f rom A nge-
l ine's E DI res u l ts is th at cros s ov er may be imp rov ed s u bs tantial l y
by al l owing th e GP al gorith m to p rotect s ome grou p s of cod e f rom
cros s ov er p ref erential l y ov er oth er grou p s of cod e. Th is s u gges ts th at
th ere are bu il d ing bl ocks in GP ind iv id u al s , th at th eir exis tence in
th e s ol u tion, on av erage, d oes create better f itnes s in th e ind iv id u al ,
and th at p rotecting s u ch bl ocks of cod e h el p s cros s ov er to p rop agate
th e better bu il d ing bl ocks th rou gh ou t th e p op u l ation.
6.5.6 Modeling Other Forms of Genetic Exchange
So far we h av e d is cu s s ed v ariants of th e cros s ov er op erator th at were
ins p ired by biol ogical s exu al recombination. Th es e v ariants d ominate
both genetic al gorith ms and genetic p rogramming.
6
Howev er, th ere
are s ev eral ways in wh ich ind iv id u al s exch ange genetic material in
natu re. Th es e f orms incl u d e conju gation, trans d u ction, and trans f or
mation (s ee th e d is cu s s ion in C h ap ter 2). C ertainl y, in th e f u tu re it
will be imp ortant to d o res earch on GP op erators ins p ired by s u ch
forms of genetic exch ange.
C onju gation is u s ed to d es cribe th e trans f er of genetic inf ormation
from one bacterial cel l to anoth er. S mith h as p rop os ed a conju gation
op erator for GA s h e d eems u s ef u l for GP as well [S mith , 1996]. Sim
p le conju gation in GA s works l ike th is : two genotyp es are s el ected
for conju gation. O ne of th em is th e d onor, th e oth er one is th e re
cip ient. A s tarting p oint (with id entical p os ition in each genotyp e)
and an end p oint (again with id entical p os ition) are ch os en. Th en
th e d onor's s el ected s u bs tring is cop ied from beginning to end to th e
recip ient, rep l acing th e corres p ond ing s u bs tring in th e recip ient.
I n GP, we need to d is tingu is h between d if f erent rep res entations .
In a tree-bas ed GP s ys tem, s tart and end p oints are nod es in th e
trees with th e s ame p os ition. I n a l inear rep res entation, s tart and
end p oints are th e p os ition of an ins tru ction in th e p rograms . I n
grap h -bas ed GP, th ey are th e coord inates of a nod e in th e grap h s .
6
O f ten, op erators of th is kind are cal l ed recombination op erators , al
th ou gh in natu re recombination is a mu ch more general term.
To f os ter th e s p read of p otential l y ad v antageou s genetic informa
tion, conju gation migh t be combined with tou rnament s el ection. I n a
2-tou rnament s ch eme, th e winner wou l d become th e d onor, th e l os er
th e recip ient of genetic material . Mu l tip l e conju gation cou l d be d one
by s ev eral d if f erent d onors cop ying genetic inf ormation to th e s ame
recip ient. Mu l tip l e conju gation inv ol v ing n d onors cou l d be combined
p ref erential l y with n + 1-tou rnament s el ection.
6.6 Improving Crossover A Proposal
I n th e cou rs e of th e d is cu s s ion of GP cros s ov er, we h av e s een its main
weaknes s es . To remed y th e s itu ation, we p res ent h ere a h omol ogou s
cros s ov er op erator for tree-bas ed GP th at s h ares wh at we id entif ied
as imp ortant ad v antages of natu ral cros s ov er.
Wh en we s ay we want to ach iev e "h omol ogou s " cros s ov er in GP,
we cou l d be s p eaking abou t one of two th ings :
1. Th e mechan ism by wh ich biol ogy cau s es h omol ogy, i.e., s p e-
ciation, al mos t id entical l ength or s tru ctu re of DNA between
p arents , and s trict bas e p airing d u ring cros s ov er; or
2. Th e reason th at mech anis m of h omol ogy h as ev ol v ed . Th e
reas on th e mech anis m h as ev ol v ed makes th e actu al mecha
nis m s omewh at irrel ev ant wh en ch anging th e med iu m. I n oth er
word s , new med ia l ike GP may imp l y new mech anis ms .
O u r p rop os al wil l f all into category 2. Th at is , we wou l d like to
p rop os e a mech anis m for cros s ov er th at f its th e med iu m of GP and
th at may ach iev e th e s ame res u l ts as h omol ogou s cros s ov er in biol ogy.
S o th e qu es tion is wh at res u l t d oes h omol ogou s cros s ov er h av e?
Q Two p arents h av e a ch il d th at combines s ome of th e genome of
each p arent.
Q Th e exch ange is stron gly bias ed toward exp erimenting with ex
ch anging v ery s imil ar ch u nks of th e genome - s p ecif ic genes per
f orming s p ecif ic f u nctions - th at h av e small v ariations among
th em, e.g., red eyes wou l d be exch anged agains t green eyes , bu t
not agains t a p oor immu ne s ys tem.
Note th at th is s econd is s u e h as two as p ects , s tru ctu re and func
tion. O bv iou s l y, in DNA , s imil arity of s tru ctu re is cl os el y rel ated
to s imil arity of f u nction. O th erwis e h omol ogou s cros s ov er wou l d not
work. DNA cros s ov er rel ies entirel y on s tru ctu re (bas e p air bond ing)
s o f ar as we know - it d oes not meas u re f u nction. I t is s p eciation
th at as s u res s imil arity of genetic f u nction d u ring h omol ogou s bio
logical cros s ov er. S o if we are p rop os ing a mech anis m to ach iev e a
res u l t s imil ar to biol ogical cros s ov er, eith er we mu s t make s u re th at
s tru ctu re al one may be u s ed to ap p roximate f u nction or we mu s t sep
aratel y meas u re f u nctional h omol ogy and u s e th os e meas u rements to
gu id e th e cros s ov er.
Here is wh at we s u gges t. We meas u re s tru ctu ral d is tances by
comp aring genotyp es and f u nctional d is tances by comp aring p h eno-
typ ic beh av ior. Th is way we h av e two d if f erent s ou rces of h omol ogy
th at we can u s e eith er s ep aratel y or combined . I n tree-bas ed GP,
h omol ogou s cros s ov er wou l d work like th is :
1. Mating selection
Two trees are s el ected rand oml y.
2. Measurement of structural similarity
S tru ctu ral s imil arity is d enned by u s ing ed it d is tances , al read y
ap p l ied by [S ankoff and Kru s kal , 1983]. Th is is a meth od for
comp aring v ariabl e l ength s tru ctu res for s imil arity. We onl y
need to f ix an ord er in wh ich to trav ers e th e tree: d ep th f irs t.
7
We nu mber al l ed ges between nod es in both trees accord ing to
d ep th -f irs t trav ers al . E ach ed ge will s u bs equ entl y s erv e as th e
"coord inate" of th e s u btree s tarting from th e nod e it p oints to.
O nce we h av e f ou nd , for each ed ge k in th e l arger tree, a s u btree
with s mal l es t d is tance (and th eref ore an ed ge imin (k)) in th e
oth er tree - a d is tance we cal l Ds(k,imin (k)) - we ad d u p al l
th es e minimal d is tances
and normal ize each Ds(k,imin (k)) th rou gh d iv is ion by DS to
yiel d a qu antity Dc[(k,imin (k)}.
8
3. Measurement of functional similarity
We meas u re th e ou tp u t of each s u btree (again, in th e s mal l er
tree) for a (s mal l ) s amp l e of th e f itnes s cas es . We comp are th e
ou tp u ts to th os e of th e oth er tree and its s u btrees and cal cu l ate
^E fficient s earch tech niqu es need to be u s ed for th e al gorith m. I t is
best to trav ers e one tree (s ay, th e l arger) and to ch eck with al l s u btrees
of th e oth er (s ay, th e s mal l er) th e d is tance between th e two. S ince we are
always l ooking for th e minimal d is tance only, d is tance comp u tation can
be s top p ed as s oon as it as s u mes a l arger v al u e th an th e p res entl y known
neares t s u btree.
8
We can d o th e s ame for th e oth er tree, in ord er to act s ymmetrical l y.
(6.4)
th e f u nctional d if f erence,
(6.5)
for th e s amp l e of a f itnes s cas es . Th e res u l ting d is tances are
again normal ized by d iv id ing by th eir s u m D
F
4. Selection of crossover points
We u s e th es e two meas u res to d etermine th e p robabil ity th at
th e trees are cros s ed ov er at a s p ecif ic ed ge accord ing to a ch os en
p ol icy. Tabl e 6.1 giv es s ome id eas for p os s ibl e p ol icies .
Table 6.1
Different policies for
crossover point selection
with the homologous
crossover operator. SMD:
structurally most distinct;
FMS: functionally most
similar. P is the
probability of crossover at
edge k. n is a
normalizing factor
assuring that P is a
probability.
A GP 1-Point
Crossover Operator
L
T
yp
e
S MD
FMS
FMS /S MD
P( C ros s ov er at ed ge f c)
Dg(k,imin (k))
l-D$(k,jmin (k))
J-S a ( rC , ITTlZTli Kj J 1 1 D p ( KI JTT12,TL(K} J I / Tl
To th is end , v al u es in Tabl e 6.1 are interp reted as p robabil ities ,
and a rou l ette wh eel is u s ed to s el ect one of th e ed ges (s u btrees ) for
cros s ov er. S u p p os e we h av e s el ected k
s
in p arent 1 by th is meth od .
We th en act eith er d eterminis tical l y by taking th e corres p ond ing ed ge
(s u btree) imin (k
s
) or jmin (k
s
), res p ectiv el y, f rom p arent 2, or we
p roceed by s el ecting a s u btree in p arent 2 by emp l oying th e rou l ette
wh eel again. Th is way we h av e bias ed cros s ov er p robabil ities by
s tru ctu ral and f u nctional f eatu res of th e trees .
A n anal ogou s meth od can be u s ed for l inear p rograms . Here, we
cou l d ev en ap p l y a mu ch s imp l er meth od , bas ed on p os ition in th e
l inear s equ ence onl y. Th ere is a p robl em for grap h -bas ed s ys tems ,
th ou gh , s ince we d o not h av e a cl ear ord er of execu tion.
Recentl y, Pol i and Langd on h av e f ormu l ated a new cros s ov er op
erator for tree-bas ed GP th at h as d is tinctl y h omol ogou s ov ertones
[Poli and Langd on, 1997b]. I t is bas ed on an anal ogou s f ormu l ation of
th e one-p oint cros s ov er of GA s for genetic p rogramming. O ne-p oint
cros s ov er for a GA s el ects one p oint onl y in both p arents to exch ange
genetic material at th is p oint (s ee Figu re 4.3). I n th e work of th e au
th ors , th is s el ection p roces s inv ol v es ch ecking for s tru ctu ral s imil arity
of th e trees in ord er to f ind a corres p ond ing p oint in th e s econd par
ent, once it h as been d etermined in th e f irs t. Th e exp erimental evi
d ence s o f ar ach iev ed for th is new op erator [Poli and Langd on, 1997a]
s u gges ts th at its beh av ior is in l ine with ou r exp ectations for a ho
mol ogou s cros s ov er op erator: d es tru ctiv e cros s ov er d iminis h es ov er
th e cou rs e of generations . Note th at Pol l and Langd on h av e bas ed
th eir op erator on f ind ing s tru ctu ral h omol ogy al one.
6.7 Improving Crossover - The Tradeoffs
We h av e concl u d ed th at, in its p res ent s tate, s tand ard GP cros s ov er
acts mainl y as a macromu tation op erator. I nd eed , mu ch of ou r dis
cu s s ion in th is ch ap ter h as f ocu s ed on h ow to imp rov e cros s ov er -
how to make it more th an a s imp l e macromu tation op erator. A l l th is
s eems to as s u me th at s imp l e macromu tation is not enou gh . Bu t it is
imp ortant not to u nd eres timate th e p ower of a s imp l e mu tation op
erator. O rgel , Tu erk/Gol d , and Bartel /S zos tak's biol ogical tes t tu be
ev ol u tion exp eriments d emons trate th e p ower of s imp l e p op u l ation-
bas ed ev ol u tionary s earch u s ing on ly mu tation, s el ection, and rep li
cation (s ee C h ap ter 2). GP cros s ov er may d o no more th an rep l icate
O rgel , Tu erk/Gol d , and Bartel /S zos tak's s earch tech niqu es in d igital
form. By its el f , th is wou l d s u gges t th at GP is a p owerf u l al gorith m
for p rogram ind u ction.
Howev er, becau s e of th e cl aims of th e s ch ema th eorem, we h av e
exp ected more of cros s ov er. A l l ind ications are th at cros s ov er can be
imp rov ed s u bs tantial l y in both th e qu al ity and efficiency of th e s earch
it cond u cts . Bu t th ere is a cos t as s ociated with imp rov ing cros s ov er
in GP. E ach of th e tech niqu es we h av e d is cu s s ed for enh ancing cross
over - brood recombination, exp l icitl y d ef ined introns , and s o f orth -
may carry ad d itional d igital ov erh ead s u ch as l es s ef f icient u s e of
memory and C PU time. Th is d igital ov erh ead may be l ikened to th e
large amou nt of biol ogical energy exp end ed to maintain h omol ogou s
cros s ov er in natu re. C ros s ov er th at acts as s ometh ing oth er th an a
macromu tation op erator d oes not come free - in biol ogy or in GP.
Th is s u gges ts two imp ortant is s u es :
LI Du p l icating h omol ogou s cros s ov er is p robabl y well worth try
ing. Natu re wou l d not was te s o mu ch energy on h omol ogou s
cros s ov er u nl es s it p l ayed an imp ortant rol e in ev ol u tionary
l earning.
Q We p robabl y s h ou l d not exp ect th e benef its of h omol ogou s
cros s ov er at any l es s er cos t th an is p aid by natu re.
I t remains to be s een wh eth er we are bes t off with a minimal cos t
ap p roach s imil ar to O rgel 's f as t RNA , or Tu erk and Gol d 's S E LE X
al gorith m f rom biol ogy, or wh eth er incu rring th e s ignif icant ov erh ead
of imp l ementing more h omol ogou s GP cros s ov er wil l p u t GP ov er a
Tradeoffs
Digital Overhead and
Homology
Locating the Threshold
th res h ol d th at yiel d s d is p rop ortionatel y l arge res u l ts . Th is th res h ol d
ap p ears to exis t in natu re - natu ral ev ol u tion h as incu rred th e over
h ead of inv enting and maintaining s p ecies , p eacock tail s , and h u ge
d ys f u nctional antl ers on mal e d eer as p art of th e p roces s of main
taining h omol ogy in cros s ov er. Wh eth er we can f ind a way to cros s
th at th res h ol d in GP is one of th e great u nans wered qu es tions in
ev ol u tionary al gorith ms .
6.8 Conclusion
Th e s ame argu ments we h av e rais ed for th e cros s ov er op erator migh t
ap p l y to th e mu tation op erator as wel l . Th e mu tation op erator is
s toch as tic. I t certainl y s tand s to benef it from imp rov ements , for ex
amp l e, th rou gh s mart mu tation or oth er typ es of ad d ed mech anis ms .
For th e s ake of th e argu ment, we h av e concentrated h ere on th e
cros s ov er op erator becau s e it is at th e h eart of s tand ard genetic pro
gramming. I t is cl earl y an imp erf ect op erator in th e cu rrent s tate of
th e art. Howev er, recent d ev el op ments s u gges t th at it wil l become
a mu ch more p owerf u l and robu s t op erator ov er th e next few years
as res earch ers incorp orate th e ap p roach es d is cu s s ed in th is ch ap ter
into th eir s ys tems , combine th e ap p roach es , and d ev is e new ways to
imp rov e th e op erator.
Wh at is th e f u tu re of th e bu il d ing bl ock h yp oth es is ? I ronical l y,
one of th e s tronges t argu ments for th e bu il d ing bl ock h yp oth es is is th e
manner in wh ich a GP p op u l ation ad ap ts to th e d es tru ctiv e effects of
cros s ov er. GP ind iv id u al s tend to accu mu l ate cod e th at d oes noth ing
d u ring a ru n we ref er to s u ch cod e as introns . Recent exp erimental
res u l ts s trongl y s u gges t th at th e bu il d u p of introns is p rimaril y an
emergent res p ons e by a GP p op u l ation to th e d es tru ctiv e effects of
cros s ov er [Nord in et al , 1996] [S ou le and Fos ter, 1997a].
9
We wil l d is cu s s th is p h enomenon at greater l ength in th e follow
ing ch ap ter, bu t h ere th e imp ortant p oint is th at th e p res ence of
introns u nd erl ines h ow imp ortant p rev ention of d es tru ctiv e cros s ov er
is in th e GP s ys tem. I nd ications are s trong th at th ere is s ometh ing
v al u abl e to p rotect from cros s ov er - p robabl y good bu il d ing blocks .
9
Th ere h as been s ome controv ers y abou t wh eth er bl oat was cau s ed by
a GP s ys tem d ef end ing its el f agains t th e d es tru ctiv e effect of crossov er.
S ome res earch ers h av e reas oned th at bl oat cou l d not be d u e to defense
agains t cros s ov er [A l tenberg, 1994a]. O th ers h av e argu ed to th e contrary
[A ngel ine, 1996]. Th e emp irical s tu d y ref erred to in th e text s u gges ts th at
A ngel ine is correct. Th ere is a v ery s trong correl ation between bl oat and
th e red u ction of d es tru ctiv e cros s ov er in GP s ys tems .
So th e ch al l enge in GP for th e next few years is to tame th e cros s ov er
op erator and to f ind th e bu il d ing bl ocks .
Table 6.2
Fitness distribution for
exercise 5
Exercises
1. Wh at is th e commones t effect of a cros s ov er ev ent in GP?
2. Giv e two meth od s for imp rov ing cros s ov er in GP.
3. Wh at is brood recombination?
4. Des cribe th e cros s ov er op erator of a grap h -bas ed s ys tem l ike
PA DO .
5. I n th e text, we mention th at th e effect of cros s ov er may be
meas u red by p airing one ch il d with one p arent. How wou l d you
p air th e p arents of Tabl e 6.2 with th e ch il d ren? How wou l d you
s core th e cros s ov er ev ent wh ere th e p arents and th e ch il d ren h ad
th e f ol l owing f itnes s es (as s u me th at h igh er is more f it)? You
Parent 1
100
900
900
900
900
900
Parent 2
1000
1000
1000
1000
1000
1000
Child 1
500
1400
900
1000
450
800
Child 2
900
900
1000
900
1100
900
may wis h to cons u l t Figu re 6.3 in ju s tif ying you r d ecis ion.
6. Prov e to you rs el f th at it wou l d be better to h av e a s ys tem th at
u s es natu ral s el ection an d combines good bu il d ing bl ocks th an
a s ys tem th at u s es onl y natu ral s el ection.
7. If you were trying to imp rov e cros s ov er in tree-bas ed GP by
u s ing a h igh er-l ev el l earner as in [Zannoni and Reynol d s , 1996]
or [Tel l er, 1996], wh at kind of inf ormation wou l d you giv e to
th e h igh -l ev el l earning s ys tem?
8. Dev is e an al gorith m to l et tree-bas ed GP grow "one gene at a
time." How wou l d you keep track of th e genes as th e p op u l ation
ev ol v ed ?
9. How wou l d you introd u ce s p ecies to GP?
10. Des ign a conju gation op erator for GP with l inear genomes .
11. Wh at ef f ects cou l d res u l t f rom u s ing GP conju gation ins tead of
cros s ov er?
12. S u gges t a GP op erator for trans d u ction and trans f ormation.
Further Reading
P.J. A ngel ine,
E VO LUTIO NA RY A LGO RI THMS A ND
E ME RGE NT I NTE LLI GE NC E .
O h io S tate Univ ers ity, C ol u mbu s , O H, 1995.
H. I ba, H. d e Garis , and T. S ato,
RE C O MBINA TIO N GUI DA NC E FO R
NUME RIC A L GE NE TI C PRO GRA MMI NG.
In 1995 I E E E C O NFE RE NC E O N E VO LUTI O NA RY C O MPUTA TI O N.
I E E E Pres s , Pis cataway, NJ, 1995.
U.-M. O 'Reil l y,
A N A NA LYS IS O F GE NE TI C PRO GRA MMI NG.
O ttawa-C arl eton I ns titu te for C omp u ter S cience, O ttawa, O ntario,
C anad a, 1995.
W.A . Tackett,
RE C O MBI NA TI O N, S E LE C TI O N, A ND THE GE NE TI C C O NS TRUC TI O N
O F C O MPUTE R PRO GRA MS .
Univ ers ity of S ou th ern C al if ornia, Dep artment of E l ectrical
E ngineering S ys tems , 1995.
7 Genetic Programming
and Emergent Order
C ontents
7.1 Introduction 176
7.2 Evolution of Structure and
Variable Length Genomes 177
7.3 Iteration, Selection, and Variable Length
Program Structures 179
7.4 Evolvable Representations 180
7.4.1 Ignoring Operators or Terminals 180
7.4.2 Finding Solutions of the Correct Length 180
7.4.3 Modularization and Meta-Learning 181
7.5 The Emergence of Introns,
Junk DNA, and Bloat 181
7.5.1 What Can We Learn from Biological Introns? . . 183
7.6 Introns in GP Defined 185
7.7 Why GP Introns Emerge 187
7.8 Effective Fitness and Crossover 188
7.9 Effective Fitness and Other Operators 190
7.10 Why Introns Grow Exponentially 191
7.11 The Effects of Introns 194
7.11.1 Problems Caused by Introns 195
7.11.2 Possible Beneficial Effects of Introns 197
7.12 What to Do about Introns 199
7.12.1 Reduction of Destructive Effects 199
7.12.2 Parsimony 200
7.12.3 Changing the Fitness Function 200
Similarity between GP
and DNA / RNA
Representation of the
Problem
7.1 Introduction
Th e d ynamics of a GP ru n are s imil ar to th e ch anges th at take p l ace
d u ring th e Q/3 rep l icas e RNA exp eriments d is cu s s ed in C h ap ter 2.
1
Both f eatu re s u bs tantial v ariety in l arge p op u l ations at th e ou ts et of
th e ev ol u tionary p roces s . Both effect p rof ou nd s tru ctu ral and func
tional ch anges in th e p op u l ation d u ring th e ru n, and both ev entu al l y
s tagnate. Th at is , both GP and Q/3 rep l icas e ru ns ev entu al l y reach
a p oint wh ere f u rth er ev ol u tion is imp os s ibl e (s ee Figu re 5.17).
C h anges in a GP ru n ref l ect th e f act th at GP, l ike natu ral evolu
tion, is a comp l ex p roces s . I t h as emergent p rop erties th at may not
be obv iou s u ntil obs erv ed in action. Th is ch ap ter f ocu s es on emergent
p rop erties aris ing from GP's f reed om of rep res entation of th e prob
l em s p ace. GP p rograms s h are many f eatu res with DNA and RNA
(s ee C h ap ters 2 and 5). A ll h av e v ariabl e l ength s tru ctu res , al l h av e
el ements th at cod e for p articu l ar actions (f u nctions and cod ons ), and
ov er time, th es e el ements may be mov ed arou nd or combined with
oth er el ements d u ring ev ol u tion.
Th e read er may recal l f rom C h ap ter 1 th at th e GP p robl em rep
res entation is , th eoretical l y, a s u p ers et of th e rep res entations of all
oth er mach ine l earning s ys tems . Th is s tems from both its v ariabl e
l ength s tru ctu re and its f reed om of ch oice of f u nctions and terminal s -
if a comp u ter can d o it, GP can u s e it in its rep res entation.
GP's enormou s f reed om of rep res entation is a mixed bl es s ing.
With s u ch a h u ge s earch s p ace, an al gorith m migh t h av e to s earch
for a l ong time. Th ere are benef its to narrowing th e s earch s p ace as
l ong as th e res earch er h as grou nd s for bel iev ing th at th e ans wer to
th e p robl em l ies s omewh ere in th at narrow s p ace. Bu t th e p rice of
narrowing th e s earch s p ace is th at th e p robl em rep res entation cannot
ev ol v e ou ts id e th is range if th e s ol u tion d oes not l ie th ere.
I n th is ch ap ter, we will l ook cl os el y at two imp ortant emergent
p rop erties of GP:
Q GP's abil ity to s earch th e s p ace of th e p robl em rep res entation.
Q Th e p robl em (or p romis e) of in tron s or bloat
We grou p th es e is s u es togeth er becau s e both p res ent imp ortant
and u nres ol v ed qu es tions for th e f u tu re of GP and both ap p ear to
emerge in GP ru ns as a res u l t of one of th e mos t d is tinctiv e f eatu res
of GP - v ariabl e l ength genotyp es .
2
1
With one imp ortant excep tion: Th e s el ection p res s u re is mu ch more
cons tant in conv entional GP s ys tems th an in th e Q/3 exp eriments .
2
A ngel ine h as argu ed correctl y th at th e d is tinction between GP and
f ixed -l ength GA s is not a real d is tinction [A ngelina, 1994]. Th at is , every
7.2 Evolution of Structure and
Variable Length Genomes
Th e cap abil ity to ev ol v e a rep res entation of th e p robl em d ep end s
on th e abil ity of a l earning al gorith m to mod if y th e s tru ctu re of its
own s ol u tions . We s h al l il l u s trate th is p oint with a, s imp l e ged anken
exp eriment abou t h ow evolution of represen tation is p os s ibl e with
v ariabl e l ength genotyp es . We contras t th at res u l t with f ixed l ength
genotyp es .
Typ ical f ixed l ength ev ol u tionary al gorith ms (E A ) come in many
f l av ors . Th ey may op timize a fixed len gth vector of real nu mbers s u b
ject to cons traints (ev ol u tionary p rogramming or ev ol u tion s trate
gies ). O r th ey may ev ol v e f ixed l ength bit s trings (as in a s tand ard
genetic al gorith m). A s we wil l s ee, s u ch f ixed l ength s tru ctu res h av e
l ittl e cap acity f or ev ol u tion of th eir genotyp e (th eir s tru ctu re) be
cau s e th e l ength and meaning of each el ement h av e been d etermined
in ad v ance.
By ev ol v ing s tru ctu re, a v ariabl e l ength genotyp e may be abl e
to l earn not onl y th e p arameters of th e s ol u tion, bu t al s o h ow many
p arameters th ere s h ou l d be, wh at th ey mean, and h ow th ey interre
l ate. Th is introd u ces many d egrees of f reed om into th e ev ol u tionary
s earch th at are mis s ing in f ixed l ength s tru ctu res .
Let u s l ook now at h ow two v ery s imp l e E A s - one f ixed and one
v ariabl e in l ength - wou l d ev ol v e a rod of a certain target l ength , s ay,
LI 9 cm. I n th is v ery s imp l e f orm, th e p robl em cou l d be s ol v ed
u s ing v ery s imp l e f ixed l ength p arameter op timization. Th e genome
would cons is t of ju s t one gene (a f ixed l ength of 1), wh ich cod ed
for th e "l ength " of th e rod . A n ev ol u tionary s earch minimizing th e
d ev iation of th e actu al l ength d (L L
t
)
n
with n > 0 wou l d s ol v e
th e p robl em eas il y.
Let u s make th e tas k more d if f icu l t. Now, th e target rod mu s t be
as s embl ed f rom oth er rod s of th ree d if f erent l ength s , s ay,
11 =4 cm (7.1)
1
2
= 2 cm (7.2)
1
3
= 1 cm (7.3)
GP s ys tem s ets s ome maximu m s ize on its rep res entation. S o in th at
sense, it h as a f ixed l ength . Likewis e, any GA s ys tem cou l d s et its f ixed
length to a v ery h igh v al u e and th en al l ow th e GA to be ef f ectiv el y s h orter,
as is exemp l if ied in [Wineberg and O p p ach er, 1996]. Nev erth el es s , as a
p ractical matter, GA s rarel y as s u me th is f orm and GP al mos t al ways d oes .
So wh en we ref er to GP's "u nu s u al " p rop erty of being v ariabl e in l ength ,
it is a p ractical argu ment.
Fixed Length
Genotypes
Variable Length
Genotypes
A Gedanken
Experiment
7 Genetic Programming and Emergent Order
Table 7.1
Solutions to rod assembly
problem, L
t
= 9, given
copies of three
elementary pieces
h = l , /
2
= 2,/
3
= 4
A rod l ength L of v arying s ize cou l d be generated by p u tting togeth er
a nu mber N of th es e el ements in arbitrary s equ ence:
(7.4)
wh ere each el ement l^ is ch os en f rom one of th e av ail abl e l ength s
l
(i)
e{l
1
,l
2
,l
3
},i = l,...,N (7.5)
Now th e p robl em is s trongl y cons trained becau s e th e E A may
onl y u s e "qu antized " p ieces of rod . A f ixed l ength genome may as
s embl e onl y a f ixed nu mber of rod s into th e target rod . Th e qu al ity
of s u ch a f ixed l ength s ys tem is entirel y d ep end ent on wh at v al u e of
N th e res earch er p icks . Tabl e 7.1 s h ows h ow th e ch oice of N af f ects
th e p robabl e s u cces s of th e s earch .
Tabl e 7.1 giv es th e nu mber of correct s ol u tions p os s ibl e for differ
ent genome s izes , togeth er with examp l es for each s ize. Th ere is no
Genome s ize
2
3
4
5
6
7
8
9
10
7^ p erf ect s ol u tions
0
3
12
20
5
6
120
42
8
1
0
S amp l e s ol u tion
-
4 4 1
4 2 2 1
4 2 1 1 1
2 2 2 2 1
4 1 1 1 1 1
2 2 2 1 1 1
2 2 1 1 1 1 1
2 1 1 1 1 1 1 1
1 1 1 1 1 1 1 1
-
s ol u tion wh ere TV < 3 or TV > 9. Fu rth er, if one ch oos es N = 5, th e
s ys tem can f ind onl y a s u bs et of al l p os s ibl e s ol u tions . Th is s u bs et
migh t ev en be d is connected in th e s ens e th at th ere is no s mooth p ath
th rou gh th e s earch s p ace on th e way to a p erf ect s ol u tion.
3
3
O ne p os s ibl e f ixed l ength genome cod ing th at wou ld work in th is par
ticu l ar cas e wou ld be to h av e th ree genes , each a natu ral nu mber th at
d ef ines h ow many of one of th e rod l ength s are to be u s ed in a s ol u tion.
Th is cl ev erl y allows th e genotyp e to s tay f ixed bu t th e p h enotyp e to ch ange.
Th is ap p roach d ep end s on th e res earch er knowing th e p robl em d omain well
and u s ing a cl ev er d ev ice to s ol v e th e p robl em. I t wou ld work onl y as l ong
as th e nu mber of p ieces to be as s embl ed remains cons tant. Bu t wh at if it
O f cou rs e, if a v ariabl e l ength s ol u tion were u s ed to rep res ent th e
p robl em in Tabl e 7.1, th e E A wou l d h av e acces s to ev ery p os s ibl e
s ol u tion in th e tabl e and wou l d not be d ep end ent on th e res earch er's
u p -f ront ch oice of N. Th u s , ou r ged anken exp eriment with th e rod s
and th e v ariabl e l ength genome may be s een in one as p ect as v ery
s imil ar to th e Q/3 rep l icas e RNA exp eriments d is cu s s ed in C h ap ter 2.
Th e original RNA temp l ate was ov er 4000 bas e p airs l ong. If th e
RNA h ad not been abl e to ch ange its v ery s tru ctu re, it wou l d nev er
h av e f ou nd th e f as t RNA s ol u tion, wh ich was onl y 218 bas e p airs l ong.
Th e v ariabl e l ength genotyp e is p erh ap s genetic p rogramming's mos t
rad ical p ractical innov ation comp ared to its E A roots .
7.3 Iteration, Selection, and Variable Length
Program Structures
Until now, ou r argu ment may h av e ap p eared to as s u me th at v aria
bl e l ength s ol u tions , by th ems el v es , h av e s ome magical p rop erty of
ch anging th eir own s tru ctu re. I n real ity, th is p rop erty emerges onl y
wh en th e v ariabl e l ength s tru ctu re is p art of a l arger d ynamic of iter
ation and selection . Th at is , th e u niqu e p rop erties of v ariabl e l ength
s tru ctu res ap p ear in an ev ol u tionary context. Th is res u l t is p erh ap s
not s u rp ris ing. DNA its el f v aries greatl y in l ength and s tru ctu re from
s p ecies to s p ecies . E v en th e Q/3 rep l icas e RNA exp eriments inv ol v ed
th e ev ol u tion of v ariabl e l ength s tru ctu res .
Th e es s ence of ev ol u tion migh t be s u bs u med as being (1) itera
tiv e ins of ar as generation af ter generation of p op u l ations are as s igned
rep rod u ction op p ortu nities ; and (2) s el ectiv e, ins of ar as th e better
p erf orming v ariants get a better ch ance to u s e th es e op p ortu nities .
I t is th u s th e interp l ay between iteration and s el ection th at makes
ev ol u tion p os s ibl e. Dawkins h as cal l ed th is as p ect cumulative selec
tion [Dawkins , 1987]. I t is cu mu l ativ e becau s e th e ef f ects of s el ection
acting on one generation are inh erited by th e next. Th e p roces s d oes
not h av e to s tart again and again u nd er rand om cond itions . Wh at
ev er h as been ach iev ed u p to th e p res ent generation wil l be a s tarting
p oint for th e v ariants of th e next.
S o f ar we h av e d eal t with abs tract notions abou t v ariabl e l ength
s tru ctu res , p robl em rep res entation, iteration, and emergent p rop er
ties . Now it is time to l ook at h ow th es e notions h av e imp ortant p rac-
tu rns ou t th at for s ome reas on it wou ld be good to form anoth er p iece of,
s ay, l ength U = 5 cm by combining two original p ieces togeth er? Th ere
wou ld be no gene for s u ch a p iece in th e genome ju s t introd u ced ; th eref ore,
no mod u l es cou l d be f ormed th at wou ld by th ems el v es cons titu te f u rth er
el ements for cons tru ction of rod s .
tical imp l ications in GP. S imp l y p u t, th e emergent GP p h enomena of
(1) ev ol v abl e p robl em rep res entations and (2) introns are among th e
mos t interes ting and trou bl ing res u l ts of combining v ariabl e l ength
s tru ctu res with iterativ e s el ection. Th e remaind er of th is ch ap ter wil l
be d ev oted to th es e two is s u es .
7.4 Evolvable Representations
Th e read er wil l recal l th at th e problem represen tation is one of th e
cru cial d ef ining f acts of a mach ine l earning s ys tem (s ee C h ap ter 1).
Mos t ML p arad igms are bas ed u p on a f airl y cons trained p robl em
rep res entation - Bool ean, th res h ol d , d ecis ion trees , cas e-bas ed rep re
s entations and s o f orth . C ons traints s ometimes h av e th e ad v antage
of making th e trav ers al of th e s ol u tion s p ace more tractabl e - as l ong
as th e s ol u tion s p ace is well tail ored to th e p robl em d omain. By way
of contras t, GP may ev ol v e any s ol u tion th at can be cal cu l ated u s ing
a Tu ring comp l ete l angu age. Th eref ore, GP s earch s p ace incl u d es
not onl y th e p robl em s p ace bu t al s o th e s p ace of th e rep res entation
of th e p robl em. Th u s , it may be th at GP can ev ol v e its own p robl em
rep res entations .
4
7.4.1 Ignoring Operators or Terminals
A s imp l e examp l e is il l u s trativ e. S u p p os e a GP s ys tem h ad th e fol
l owing f u nctions to work with : Pl u s , Minu s , Times , Div id e. GP
can ch ange th is rep res entation by ignoring any of th es e f u nctions ,
th ereby red u cing th e f u nction s et. Wh y s h ou l d th is h ap p en? Wh en
iteration and s el ection are ap p l ied to v ariabl e l ength s tru ctu res , th e
s ys tem s h ou l d magnif y th e exp l oration of s ections of th e rep res enta
tion s p ace th at p rod u ce better res u l ts [E igen, 1992]. S o if s ol u tions
th at u s e th e d iv id e op erator were, in general , p rod u cing wors e res u l ts
th an oth ers , we cou l d exp ect th e s ys tem to red u ce and , ev entu al l y,
to el iminate th e d iv id e op erator from th e p op u l ation.
7.4.2 Finding Solutions of the Correct Length
E l imination of op erators is not th e onl y way by wh ich GP may ev ol v e
rep res entations . Let u s go back to th e examp l e abov e abou t ev ol v ing
a rod of a p articu l ar l ength . Th ere is an area of th e s earch s p ace
4
Th is is not to s ay th at GP al ways d is cov ers good rep res entations .
Th ere is s ome ev id ence th at ov erl oad ing a GP s ys tem with f u nctions can
cau s e th e s ys tem to s tick in a l ocal minimu m [Koza, 1992d ]. Nev erth el es s ,
u nl ike oth er mach ine l earning p arad igms , it is able to ev olv e rep res enta
tions .
between a genome s ize of th ree and eigh t th at is a better area to
ch eck th an, s ay, a genome s ize of twenty. Th e mu l tip l icativ e effect
of iteration, s el ection, and v ariabl e l ength s ol u tions s h ou l d d raw th e
s earch away from genomes th at h av e a s ize of twenty v ery qu ickl y
and s h ou l d f ocu s it on th e p romis ing area.
Wh ere we d o not know th e s ize of th e bes t s ol u tion to a p robl em
in ad v ance, th e abil ity of GP to examine d if f erent s ize s ol u tions is v ery
imp ortant. I f l imited to a f ixed l ength , a s ol u tion may be too big or
too s mal l . Both s itu ations cau s e p robl ems . I f th e l arges t p ermitted
s ol u tion is l es s th an th e op timal s ol u tion s ize, a f ixed l ength s ys tem
s imp l y l acks th e f irep ower to f ind th e bes t ans wer. O n th e oth er h and ,
if a f ixed l ength s ol u tion is too l ong, it may not general ize well (s ee
C h ap ter 8). Genetic p rogramming can f ind a s h ort or a l ong s ol u tion
wh ere a f ixed l ength rep res entation cannot.
7.4.3 Modularization and Meta-Learning
Th e cap abil ity of GP to s earch th e s p ace of th e p robl em rep res enta
tion is an area wh ere res earch h as onl y begu n. Mod u l arization re
s earch (s ee C h ap ter 10) and Koza's au tomatical l y d ef ined f u nctions
are two p romis ing d irections in th is regard .
A noth er v ery exciting ap p roach to th is is s u e in GP is a meta-
learn in g ap p roach . Meta-l earning occu rs wh en inf ormation abou t th e
p robl em rep res entation from one GP ru n is u s ed to bias th e s earch
in l ater GP ru ns . I n 1995, Wh igh am d es igned an evolvable con text-
free grammar. Th e grammar d ef ined wh at typ es of p rograms cou l d
be created by th e GP s ys tem on initial ization. His s ys tem was de
s igned to cap tu re as p ects of th e f u nction and terminal s et th at were
as s ociated with s u cces s f u l ind iv id u al s d u ring a ru n and to u s e th at
inf ormation to bias th e grammar u s ed in f u tu re ru ns . His res u l ts
were v ery encou raging [Wh igh am, 1995a]. Th is work is p robabl y th e
bes t examp l e to d ate of h ow GP's f l exibil ity may be u s ed exp l icitl y
to ev ol v e p robl em rep res entations . Th e au th ors regard th is d irection
as one of th e mos t p romis ing areas for f u tu re GP res earch .
Wh il e v ariabl e l ength s ol u tions h av e p otential l y great ad v antages ,
th ey al s o ap p ear to be th e cau s e of wh at may be trou bl ing emergent
p rop erties in GP ru ns cal l ed , v ariou s l y, in tron s or bloat.
7.5 The Emergence of Introns,
Junk DMA, and Bloat
I n 1994, A ngel ine noted th at many of th e ev ol v ed s ol u tions in Koza's
book contained cod e s egments th at were extraneou s . By extraneou s ,
GP Intron Terminology
GP Bloat
The Persistence of
Introns
Bloat and Run
Stagnation
h e meant th at if th os e cod e s egments were remov ed from th e s ol u tion,
th is wou l d not al ter th e res u l t p rod u ced by th e s ol u tion. E xamp l es
of s u ch cod e wou l d be
a = a + 0
b = b * 1
A ngel ina noted th at th is extra cod e s eemed to emerge s p ontaneou s l y
from th e p roces s of ev ol u tion as a res u l t of th e v ariabl e l ength of
GP s tru ctu res and th at th is emergent p rop erty may be imp ortant to
s u cces s f u l ev ol u tion [A ngel ine, 1994].
A ngel ine was th e f irs t GP res earch er to as s ociate th is emergent
"extra cod e" in GP with th e concep t of biol ogical introns . I n C h ap ter
2, we brief l y d is cu s s ed biol ogical introns . Qu es tions may be rais ed
as to th e ap p rop riatenes s of th e anal ogy between th is extra cod e and
biol ogical introns , as we wil l note bel ow. Nev erth el es s , th e u s e of th e
term in tron to ref er to th is extra cod e h as become wid es p read in th e
GP commu nity and we wil l , th eref ore, u s e th e term in tron s or GP
in tron s to ref er to th e extra cod e in GP th at was f irs t id entif ied by
A ngel ine in 1994.
A l s o in 1994, Tackett obs erv ed th at GP ru ns tend to "bl oat."
Th at is , th e ev ol v ed ind iv id u al s ap p arentl y grow u ncontrol l abl y u ntil
th ey reach th e maximu m tree d ep th al l owed . Tackett h yp oth es ized
th at GP bl oat was cau s ed by bl ocks of cod e in GP ind iv id u al s th at,
wh il e th ey h ad l ittl e merit on th eir own, h ap p ened to be in cl os e
p roximity to h igh f itnes s bl ocks of cod e. Tackett ref erred to th is
p h enomenon as h itch h iking [Tackett, 1994].
A bod y of res earch s ince 1994 h as meanwh il e es tabl is h ed th at GP
bl oat is , in real ity, cau s ed by GP introns [McPh ee and Mil l er, 1995]
[Nord in and Banzh af , 1995a] [Nord in et al ., 1995] [S ou le et al ., 1996]
[Nord in et al ., 1996] [S ou le and Fos ter, 1997b] [Ros ca, 1997]. Th ou gh
A ngel ine s aw th e extraneou s cod e as an "occas ional occu rrence," sub
s equ ent res earch h as rev eal ed th at introns are a p ers is tent and p rob
l ematic p art of th e GP p roces s . For examp l e, s tu d ies in 1995 and
1996 s u gges t th at in th e earl y to mid d l e s ections of GP ru ns , in
trons comp ris e between 40% and 60% of all cod e. Later in th e ru n,
emergent GP introns tend to grow exp onential l y and to comp ris e
al mos t al l of th e cod e in an entire p op u l ation [Nord in et al ., 1995]
[Nord in et al ., 1996] [S ou le et al ., 1996] [S ou le and Fos ter, 1997b]
[Ros ca, 1997]. Th e ev id ence is s trong th at ev ol u tion s el ects for th e
exis tence of GP introns .
Bl oat is a s eriou s p robl em in GP. O nce th e exp onential growth of
introns as s ociated with bl oat occu rs , a GP ru n al mos t al ways s tag
nates - it is u nabl e to u nd ergo any f u rth er ev ol u tion [Tackett, 1994]
[Nord in et al ., 1995] [Nord in et al ., 1996]. O n th e oth er h and , A nge-
l ine s u gges ted in h is s eminal articl e th at emergent iritrons may h av e a
benef icial effect on ev ol u tion in GP. Was A ngel ine wrong or are th ere
two d if f erent bu t cl os el y rel ated p h enomena at work h ere?
I t may well be th at d u ring th e earl y and mid d l e p art of a ru n,
introns h av e benef icial ef f ects . For examp l e, th eory and s ome ex
p erimental ev id ence s u gges ts introns may make it more l ikel y th at
good bu il d ing bl ocks wil l be abl e to p rotect th ems el v es agains t th e
d amaging ef f ects of cros s ov er [A ngel ine, 1996] [Nord in et al ., 1995]
[Nord in et al ., 1996]. O n th e oth er h and , th e exp onential growth of
introns (bl oat) at th e end of th e ru n is p robabl y d el eteriou s .
Th e remaind er of th is ch ap ter will be d ev oted to th e major is s u es
in GP regard ing introns . I n brief s u mmary, th ey are as f ollows :
Q How v al id is th e anal ogy between GP introns and biol ogical
introns ? C an we l earn anyth ing from biol ogy abou t GP introns ?
Q How s h ou l d th e term in tron be d ef ined in GP?
Q Wh at cau s es th e emergence of GP introns ?
LI Wh at are th e rel ativ e cos ts and benef its of introns in GP ru ns ?
Q How may GP res earch ers d eal with bl oat?
With th is introd u ction in h and , it is now p os s ibl e to mov e on to
a d etail ed anal ys is of th e p h enomenon of introns .
7.5.1 What Can We Learn from Biological Introns?
I n C h ap ter 2, we brief l y d is cu s s ed introns , exons , and ju nk DNA . I n
a greatl y ov ers imp l if ied ov erv iew, DNA is comp ris ed of al ternating
s equ ences of:
Q Bas e p airs th at h av e no ap p arent effect on th e organis m cal l ed
ju nk DNA ;
Q Bas e p airs th at exert control ov er th e timing and cond itions of
p rotein p rod u ction, of ten ref erred to as control s egments ; and
Q Bas e p airs th at comp ris e genes . Genes are th e activ e DNA
s equ ences res p ons ibl e for manu f actu ring p roteins and p ol yp ep -
tid es (p rotein f ragments ).
Th e gene s equ ences th ems el v es may be f u rth er d iv id ed into:
Q E xons , bas e s equ ences th at activ el y manu f actu re p roteins or
p ol yp ep tid es ; and
No Direct Effect on the
Genotype
Protection Role of GP
and Biological Introns
Q I ntrons , bas e s equ ences th at are not inv ol v ed in th e manu f ac
tu re of p roteins .
I t is temp ting to concl u d e th at, becau s e biol ogical introns are not
inv ol v ed in p rotein manu f actu re, th ey mu s t be th e biol ogical equ iv a
l ent of th e GP introns . Th ey are th ere bu t th ey d o noth ing. Wh il e
th ere are u nd ou bted s imil arities between GP introns and biol ogical
introns , th ere are al s o real d if f erences th at mu s t be taken into accou nt
wh en making anal ogies between th e two. Th e f ol l owing are s ome of
th e more imp ortant s imil arities and d if f erences .
A gene p rod u ces a p rotein by f irs t trans cribing an mRNA (mes
s enger RNA ) mol ecu l e th at is ef f ectiv el y a cop y of th e bas e s equ ence
of th e gene. Th en th e mRNA mol ecu l e is trans l ated into a p rotein or
p rotein f ragment. Wh at h ap p ens to th e introns d u ring th is p roces s
is f as cinating. E ach intron in a gene h as a bas e p air s equ ence at th e
beginning and end of th e intron th at id entif ies it as an intron. Be
f ore th e mRNA is trans l ated to a p rotein, al l of th e intron s equ ences
are neatl y s nip p ed ou t of th e trans l ating s equ ence. I n oth er word s ,
biol ogical introns d o not d irectl y trans l ate into p roteins . Th eref ore,
th ey d o not d irectl y trans l ate into th e p h enotyp e of th e organis m.
I n th is s ens e th ey are qu ite s imil ar to GP introns . Th e "extraneou s
cod e" in GP introns d oes not affect th e beh av ior of a GP ind iv id u al
at al l . Recal l th at bes t anal ogy in GP to th e biol ogical p h enotyp e is
th e behavior of th e GP ind iv id u al . Th u s , neith er biol ogical nor GP
introns d irectl y trans l ate to th eir res p ectiv e p h enotyp es .
We wil l d es cribe in d etail , l ater, th e th eoretical and exp erimental
res u l ts th at s u gges t th at GP introns may p l ay s ome rol e in p rotecting
good bu il d ing bl ocks agains t d es tru ctiv e cros s ov er. Wats on d es cribes
a s imil ar rol e for biol ogical introns :
[S jev eral as p ects of th e s tru ctu res of interru p ted genes h int th at
th e p res ence of introns (cou p l ed with th e abil ity to excis e th em
at th e RNA l ev el ) cou l d h av e been u s ed to ad v antage d u ring th e
ev ol u tion of h igh er eu caryotic genomes .
S ince exons can corres p ond to s ep arate s tru ctu ral or f u nctional
d omains of p ol yp ep tid e ch ains , mixing s trategies may h av e been
emp l oyed d u ring ev ol u tion to create new p roteins . Hav ing ind iv id
u al p rotein-cod ing s egments s ep arated by l ength y intron s equ ences
s p read s a eu caryotic gene ou t ov er a mu ch l onger s tretch of DNA
th an th e comp arabl e bacterial gene. Th is will s imu l taneou s l y in
creas e th e rate of recombination between one gene and anoth er
and al s o lower th e p robabil ity th at th e recombinant joint will fall
with in an exon and create s ome u naccep tabl e aberrant s tru ctu re
in th e new p rotein. I ns tead , recombination will mos t likely take
p l ace between intron s equ ences , th ereby generating new combina
tions of ind ep end entl y f old ed p rotein d omains .
WA TS O N E T A L., 1987
Note th at th is is v ery mu ch l ike ou r l ater d es crip tion of th e pos
s ibl e "s tru ctu ral " effect of introns in th e earl y and mid d l e p art of GP
ru ns . I n th eir s tru ctu ral rol e, introns wou l d s erv e to s ep arate good
bl ocks of cod e and to d irect th e cros s ov er op erator to p ortions of th e
genome wh ere cros s ov er wil l not d is ru p t th e good bl ocks .
O n th e oth er h and , th ere is no biol ogical anal ogy to th e ru naway,
exp onential growth of introns at th e end of GP ru ns th at is ref erred
to as bl oat. S o wh il e it may be v al id to d raw th e anal ogy between
GP introns th at s erv e a s tru ctu ral rol e and biol ogical introns , th e
anal ogy is s trained at bes t wh en it comes to bl oat.
A s we d is cu s s ed in C h ap ter 2, th e exis tence and contents of bi
ol ogical introns are correl ated with s ignif icant ef f ects on both th e
amou nt and th e qu al ity of th e p roteins exp res s ed by th e gene in
wh ich th e introns occu r. Th is is tru e d es p ite th e f act th at introns
h av e no direct effect on p rotein manu f actu re. Th e mech anis m of th e
ind irect effect is not known. Nev erth el es s , we can concl u d e th at bi
ol ogical introns d o ind irectl y af f ect th e s u rv iv abil ity of th e organis m
and its genetic material .
GP introns d o not h av e any known effect on th e s u rv iv abil ity
of th e GP ind iv id u al , d irect or ind irect. Howev er, th ey p robabl y
d o af f ect th e s u rv iv abil ity of th e of f s p ring of a GP ind iv id u al qu ite
p rof ou nd l y (s ee bel ow). Th u s , GP introns d o h av e an ind irect effect
on th e s u rv iv abil ity of th e gen etic material of an ind iv id u al .
Notwith s tand ing th at both biol ogical and GP introns h av e an
ind irect effect on s u rv iv abil ity, th e natu re of th e effect is d if f erent.
A ccord ingl y, wh il e th ere are s imil arities between biol ogical introns
and GP introns , th e d if f erences are s u bs tantial and mu s t be taken
into accou nt wh en reas oning from one d omain to th e oth er.
Introns Affect the
Survivability of the
Organism Only
Indirectly
Conclusion
7.6 Introns in GP Defined
I n C h ap ters 2 and 5, we d is cu s s ed h ow GP f requ entl y d oes not d is tin
gu is h between genotyp e and p h enotyp e s tru ctu res . I n th at cas e, th e
GP p rogram may be regard ed as th e genotyp e and its behavior (th at
is , th e s tate trans itions it cau s es in th e comp u ter) may p rop erl y be
regard ed as th e p h enotyp e [Maynard -S mith , 1994] [A ngel ine, 1994].
O n th e oth er h and , many GP and GA s ys tems f eatu re an exp l icit dis
tinction between th e genotyp e s tru ctu re and th e p h enotyp e s tru ctu re.
I n th at cas e, th e p h enotyp e's structure is , by anal ogy with biol ogy,
Introns Defined
Intron Equivalents
p rop erl y regard ed as part of th e p h enotyp e. Bu t th e beh av ior of th e
entity wou l d be p art of th e p h enotyp e in th is s itu ation al s o.
Def ining a GP introii becomes rath er tricky wh en one mu s t be
cons is tent with th e biol ogical anal ogy u p on wh ich th e th eory of in-
trons is bas ed . Recal l th at th e s trict biol ogical d ef inition of an intron
is a s equ ence of bas e p airs th at is cl ip p ed ou t bef ore th e matu ring
of mes s enger RNA . More general l y, s ince an organis m may s u rv iv e
onl y by s tru ctu re or beh av ior, an intron is d is tinctiv e p rimaril y as
a s equ ence of th e DNA th at af f ects th e ch ances of th e organis m's
s u rv iv al onl y ind irectl y.
From th e abov e argu ment, two f eatu res may be u s ed to d ef ine
introns :
Q A n intron is a f eatu re of th e genotyp e th at emerges from th e
p roces s of th e ev ol u tion of v ariabl e l ength s tru ctu res ; and
Q A n intron d oes not d irectl y affect th e s u rv iv abil ity of th e GP
ind iv id u al .
Und er th e abov e d ef inition, th e following S -exp res s ions wou l d be
examp l es of introns :
(NO T (NO T X)),
(A ND . . . (O R X X)),
( +. . . ( - XX) ) ,
(+ X 0),
(* * i),
(*. . . ( DI VXX) ) ,
(MO VE -LE FT MO VE -RI GHT),
(I F (2 = 1) . . . X),
(S E T A A )
By th is d ef inition, we d raw v ery h eav il y on A ngel ine's 1994 con
cep ts , wh ich al s o f ocu s ed on th e v ery interes ting d u al as p ect of in
trons . I ntrons are emergent an d th ey d o not d irectl y affect th e f itnes s
of th e ind iv id u al [A ngel ine, 1994]. I n GP, th is means th at any cod e
th at emerges from a GP ru n and d oes not affect th e f itnes s of th e
ind iv id u al may p rop erl y be regard ed as an intron.
By th is d ef inition, we al s o ignore th e d etail s from biol ogy of h ow
an intron manages not to be exp res s ed (i.e., th e intron is s nip p ed
ou t bef ore th e matu ring of mRNA ). I n s h ort, we regard th e f act th at
biol ogical introns are not exp res s ed as p roteins to be more imp or
tant th an th e manner in wh ich th at occu rs . Th e imp ortance of th is
d is tinction will become cl ear in th e next s ection.
I n C h ap ter 6, we noted th at many res earch ers h av e u s ed v ariou s
tech niqu es to ins ert "artif icial " introns into th eir GP s ys tems . Wh il e
both emergent and artif icial l y ins erted introns may beh av e in s imil ar
ways , th e d is tinction is imp ortant. I n th is book, wh en we u s e th e
term in tron , we mean an emergen t intron as d ef ined abov e. Wh en
we ref er to artif icial l y ins erted introns , we s h al l u s e th e term artifi
cial in tron equivalen ts. Th eref ore, th e ins ertion into th e genome of
exp l icitl y d ef ined introns by Nord in et al . and A ngel ine, of introns by
Wineberg et al ., and of write ins tru ctions th at h av e no effect by An
d re et al . may al l be regard ed as d if f erent ways of ins erting artif icial
intron equ iv al ents into th e genome. Unl ike introns , artif icial intron
equ iv al ents d o not emerge from th e ev ol u tionary p roces s its el f .
O ne f inal d is tinction: we s h al l cal l an intron global if it is an
intron for ev ery v al id inp u t to th e p rogram, and we cal l it local if it
acts as an intron onl y for th e cu rrent f itnes s cas es and not neces s aril y
for oth er v al id inp u ts .
Global vs. Local Introns
7.7 Why GP Introns Emerge
By d ef inition, introns h av e no effect on th e f itnes s of a GP ind iv id u al .
We wou l d not exp ect to s ee s trong s el ection p res s u re to create any
genomic s tru ctu re th at d oes not affect th e f itnes s of an ind iv id u al . S o
wh y d o introns emerge? Th e s h ort ans wer is th at, wh il e introns d o not
affect th e f itnes s of th e ind iv id u al , th ey d o affect th e l ikel ih ood th at
th e ind iv id u al 's d es cend ants will s u rv iv e. We s h al l ref er to th is new
concep t of f itnes s , wh ich incl u d es th e s u rv iv abil ity of an ind iv id u al 's
of f s p ring, as effective fitn ess.
Th e ef f ectiv e f itnes s of an ind iv id u al is a f u nction not onl y of h ow
f it th e ind iv id u al is now bu t al s o of h ow f it th e ind iv id u al 's ch il d ren
are l ikel y to be. By th is v iew, th e abil ity of an ind iv id u al to h av e h igh -
f itnes s ch il d ren (giv en th e exis ting genetic op erators ) is as imp ortant
to th e continu ed p rop agation of th e ind iv id u al 's genes th rou gh th e
p op u l ation as is its abil ity to be s el ected for cros s ov er or mu tation in
th e f irs t p l ace. I t d oes no good for an ind iv id u al to h av e h igh f itnes s
and to be s el ected for cros s ov er or mu tation if th e ch il d ren th ereby
p rod u ced are v ery low in f itnes s . Th u s , we wou l d exp ect ind iv id u al s
to comp ete with each oth er to be abl e to h av e h igh -f itnes s ch il d ren.
Th e read er will recal l th at th e normal effect of cros s ov er is th at
th e ch il d ren are mu ch l es s f it th an th e p arents ; s ee C h ap ter 6. S o
too is th e normal effect of mu tation. A ny p arent th at can amel iorate
eith er of th es e ef f ects ev en a l ittl e wil l h av e an ev ol u tionary ad v antage
ov er oth er p arents . A nd th is is wh ere introns come in.
S imp l y p u t, th e th eoretical and exp erimental ev id ence tod ay sup
p orts th e h yp oth es is th at introns emerge p rincip al l y in res p ons e to th e
f requ entl y d es tru ctiv e ef f ects of genetic op erators [Nord in et al ., 1995]
Destructive Genetic
Operators
Effective Fitness
An Important Caveat
[Nord in et al ., 1996] [S ou le et al ., 1996] [S ou le and Fos ter, 1997b]
[Ros ca, 1997]. Th e better th e p arent can p rotect its ch il d ren f rom
being th e res u l ts of d es tru ctiv e genetic op erators , th e better th e ef
fective fitn ess of th e p arent. I ntrons h el p p arents d o th at.
Th is concep t of effective fitn ess wil l be v ery imp ortant l ater. I t
is cl earl y a f u nction of at l eas t two f actors :
1. Th e f itnes s of th e p arent. Th e f itter th e p arent, th e more l ikel y
it is to be ch os en for rep rod u ction.
2. Th e l ikel ih ood th at genetic op erators wil l affect th e f itnes s of
th e p arent's ch il d ren.
I ntrons emerge as a res u l t of comp etition among p arents with
res p ect to th e s econd item.
I t is imp ortant to note wh at we are n ot s aying. We d o not con
tend th at d es tru ctiv e cros s ov er is al ways bad or th at it is al ways
good th at ch il d ren h av e f itnes s as good or better th an th eir p arents
[A nd re and Tel l er, 1996]. I n f act, s u ch a ru l e wou l d red u ce GP to
s imp l e h il l cl imbing. Rath er, we are s aying th at d es tru ctiv e genetic
op erators are th e p rincip al cau s e of introns . Th eref ore, one s h ou l d not
take ou r u s e of th e term con structive crossover to mean th at cros s ov er
s h ou l d al ways be cons tru ctiv e. Nor s h ou l d one u nd ers tand f rom th e
term destructive crossover th at it s h ou l d nev er h ap p en. E v ol u tion is
more comp l ex th an th at. Th u s , wh eth er introns are benef icial , d etri
mental , or both in th e GP ev ol u tion p roces s h as noth ing to d o with
th e qu es tion of wh y introns emerge.
Absolute vs. Effective
Complexity
7.8 Effective Fitness and Crossover
I t is p os s ibl e to d eriv e a f ormu l a th at d es cribes th e ef f ectiv e f itnes s
of an ind iv id u al . Th at f ormu l a p red icts th at th ere wil l be s el ection
p res s u re for introns . Bef ore d eriv ing th is f ormu l a, it is neces s ary to
d ef ine th e ef f ectiv e and abs ol u te comp l exity of a p rogram.
By th e complexity of a p rogram or p rogram bl ock we mean th e
l ength or s ize of th e p rogram meas u red with a meth od th at is natu ral
for a p articu l ar rep res entation. For a tree rep res entation, th is cou l d
be th e nu mber of nod es in th e bl ock. For th e binary s tring rep res en
tation, it cou l d be, e.g., th e nu mber of bits . Th e absolute len gth or
absolute complexity of a p rogram or a bl ock of cod e is th e total s ize
of th e p rogram or bl ock. Th e effective len gth or effective complexity
of a p rogram or bl ock of cod e is th e l ength of th e activ e p arts of th e
cod e with in th e p rogram or bl ock, in contras t to th e intron p arts .
Th at is , th e activ e p arts of th e cod e are th e el ements th at affect th e
f itnes s of an ind iv id u al .
7.8 Effective Fitness and Crossover
EEj]
I n d eriv ing t h e ef f ectiv e f itnes s of t h e ind iv id u al , we mu s t be
caref u l t o d is tingu is h bet ween ef f ectiv e and abs ol u t e comp l exity. We
may s t ar t d eriv ing t h e ef f ectiv e f itnes s of an ind iv id u al by f ormu l ating
an equ at i on t h at res embl es t h e s ch ema t h eorem [Hol l and , 1992] f or
t h e rel at i ons h i p between t h e entities d es cribed abov e.
Th e f ol l owing d ef inition wil l be u s ef u l : A Few Defin ition s an d
a Statement
Let C? be t h e ef f ectiv e comp l exity of p r ogr am j , and CJ its
abs ol u t e comp l exity.
Let p
c
be t h e s t and ar d GP p ar amet er f or t h e p robabi l i t y of
cros s ov er at t h e ind iv id u al l ev el .
Th e p robabi l i t y t h at a cros s ov er in an active block of p rogram j
wil l l ead t o a wors e f itnes s f or t h e ind iv id u al is t h e p robabi l i t y
of d es t ru ct i v e cros s ov er, pj. By d ef inition p ^ of an abs ol u t e
i nt ron
5
is zero.
Let fj be t h e f itnes s
6
of t h e i nd i v i d u al and / be t h e av erage
f itnes s of t h e p op u l at i on in t h e cu rrent generat i on.
Us ing f itnes s -p rop ortionate s el ection
7
and bl ock exch ange cros s ov er,
f or any p rogram j , t h e av erage p rop ort i on Pj
+1
of t h i s p rogram in
t h e next generat i on is :
(7.6)
I n s h ort , equ at i on (7.6) s t at es t h at t h e p rop ort i on of cop ies of
a p rogram in t h e next generation is t h e p rop ort i on p rod u ced by t h e
s el ection op erat or minu s t h e p rop ort i on of p rograms d es troyed by
cros s ov er. S ome of t h e ind iv id u al s cou nt ed in P
t + 1
mi gh t be mod if ied
by a cros s ov er in t h e abs ol u t e intron p ar t , bu t t h ey are incl u d ed
becau s e t h ey s til l s h ow t h e s ame beh av ior at t h e p h enot yp e l ev el .
Th e p rop ort i on P*
+ 1
is a cons erv ativ e meas u re becau s e t h e ind iv id u al
j mi gh t be recreat ed by cros s ov er wi t h ot h er i nd i v i d u al s .
8
E qu at i on (7.6) can be rewri t t en as :
A n abs ol u te intron is d ef ined as neith er h av ing an ef f ect on th e ou tp u t
nor being af f ected by cros s ov er.
6
Notice th at th is is not s tand ard ized f itnes s u s ed in GP. Here a better
f itnes s giv es a h igh er f itnes s v al u e (GA ).
7
Th e reas oning is anal ogou s f or many oth er s el ection meth od s .
8
Th e ev ent of recreating ind iv id u al s can be meas u red to be l ow excep t
wh en ap p l ying a v ery h igh external p ars imony p res s u re th at f orces th e
p op u l ation to col l ap s e into a p op u l ation of s h ort bu il d ing bl ocks .
ll'U
7 Genetic Programming and Emergent Order
t+1
(fj-Pc-fj-ti-Cj/C?
j
~ l r
We may i nt erp ret t h e cros s ov er-rel ated t er m as a d irect s u bt ract i on
f rom t h e f itnes s in an exp res s ion f or rep rod u ct i on t h rou gh s el ection.
I n ot h er word s , rep rod u ct i on by s el ection an d cros s ov er act s as re-
p rod u ct i on by s el ection on ly, if t h e f itnes s is ad ju s ted by t h e t erm:
Pc-fi-^-pl (7-8)
Term (7.8) can be regard ed as a f itnes s t er m p rop ort i onal t o
p r ogr am comp l exity. Hence we d ef ine effective fitn ess fj as :
n = h-p*-n-%-p
d
i ( ^
Th e ef f ectiv e f itnes s of a p arent ind iv id u al , th eref ore, meas u res h ow
many ch il d ren of t h at p arent are l ikel y t o be ch os en f or rep rod u ct i on
in t h e next generat i on.
9
A p arent can increas e its ef f ectiv e f itnes s by
l owering its ef f ectiv e comp l exity ( t h at is , h av i ng its f u nctional cod e
become more p ars imoniou s ) or by increas ing its abs ol u t e comp l exity
or bot h . E i t h er red u ces t h e rel ativ e t arget area of f u nctioning cod e
t h at may be d amaged by cros s ov er. E i t h er h as t h e ef f ect of increas -
ing t h e p robabi l i t y t h at t h e ch il d ren of t h at p arent wil l inh erit t h e
good genes of t h e p arent i nt act . I n ot h er word s , t h e d if f erence be-
tween ef f ectiv e f itnes s and act u al f itnes s meas u res t h e ext ent t o wh ich
t h e d es t ru ct i v e ef f ect of genetic op erat ors is warp ing t h e real f itnes s
f u nction away f rom t h e f itnes s f u nction d es ired by t h e res earch er.
Rooted-Tree Schemata Recentl y, Ros ea h as d eriv ed a v ers ion of t h e s ch ema t h eor em f or
"root ed -t ree s ch emas " t h at ap p l ies t o GP. A rooted-tree schema is a
s u bs et of t h e s et of p r ogr am trees t h at mat ch an id entical t ree f rag-
ment wh ich incl u d es t h e t ree root. Th e rooted-tree schema theorem
al s o p red i ct s t h at an ind iv id u al may increas e t h e l ikel ih ood t h at its
genetic mat eri al wil l s u rv iv e i nt act in f u tu re generat i ons by eith er
increas ing t h e f itnes s of t h e ind iv id u al or increas ing t h e s ize of t h e
ind iv id u al [Ros ea, 1997].
7.9 Effective Fitness and Other Operators
Th e abov e equ at i ons cou l d eas il y be ref ined t o qu antif y t h e ef f ect of
t h e d es t ru ct i v e qu al i t y of any genetic op erat or s imp l y by rep l acing
t h e t er m f or t h e p robabi l i t y of d es t ru ct i v e cros s ov er wi t h , s ay, a new
I h is as s u mes / /
(7.7)
Effective Fitness,
Formal
7.10 Why Introns Grow Exponentially wm
term f or th e p robabil ity of d es tru ctiv e mu tation. S ince th e ef f ect of
mu tation is normal l y qu ite d es tru ctiv e, th is mod el wou l d p red ict th at
s ome f orm of intron s h ou l d emerge in res p ons e to mu tation. I n f act,
th at is exactl y wh at h ap p ens .
A n examp l e of s u ch an intron we f ou nd in great nu mbers in
A I MGP wh en increas ing th e p robabil ity of mu tation is :
Registerl = Register2 >> Register^ (7.10)
S h if t-righ t ( >>) is ef f ectiv el y a d iv is ion by p owers of 2. Here, mu -
tations th at ch ange argu ment regis ters or th e content of argu ment
regis ters are l es s l ikel y to h av e any ef f ect on f itnes s . By way of con-
tras t, an intron l ike
A Mutation-Resistant
Intron
Registerl = Registerl + 0 (7.11)
more typ ical f or a h igh cros s ov er p robabil ity ru n wou l d v ery l ikel y
be ch anged into ef f ectiv e cod e by a mu tation. I n s h ort, a typ e 7.10
intron may be rel ativ el y more res is tant to mu tation th an a typ e 7.11
intron. I nteres tingl y, th es e new introns are al s o res is tant to cros s ov er.
We can s u s p ect a general tend ency of th e GP s ys tem to p rotect
its el f agains t th e attack of op erators of an y kind . Wh en it is no
l onger p robabl e th at f itnes s wil l imp rov e, it becomes more and more
imp ortant f or ind iv id u al s to be p rotected agains t d es tru ctiv e ef f ects
of op erators , regard l es s of wh eth er th es e are cros s ov er, mu tation, or
oth er kind s of op erators .
E qu ation 7.9 cou l d th u s be general ized to incl u d e th e ef f ects of
oth er op erators as wel l :
fi-m-~E^-^
d
-
c
r]
(7.12)
Solutions Defend
Themselves
wh ere r ru ns ov er al l op erators trying to ch ange an ind iv id u al , p
r
is
th e p robabil ity of its ap p l ication, p
r
,' is th e p robabil ity of it being
d es tru ctiv e, and C^'
e
is th e ef f ectiv e comp l exity f or op erator r.
7.10 Why Introns Grow Exponentially
I ntrons al mos t al ways grow exp onential l y toward th e end of a ru n.
We bel iev e th at th e reas on is th at introns can p rov id e v ery ef f ectiv e
global protection agains t d es tru ctiv e cros s ov er. By th at, we mean
th at th e p rotection is gl obal to th e entire ind iv id u al . Th is h ap p ens
becau s e at th e end of a ru n, ind iv id u al s are at or cl os e to th eir bes t
p erf ormance. I t is d if f icu l t f or th em to imp rov e th eir f itnes s by s ol v ing
th e p robl em better. I ns tead , th eir bes t s trategy f or s u rv iv al ch anges .
( Ge ne t i c Pr og r a mmi n g and Eme r g e n t Or der
Th ei r s t rat egy becomes t o p rev ent d es t ru ct i v e genetic operators f rom
d i s ru p t i ng t h e good s ol u tions al read y f ou nd .
No En d to In tron O ne can ref ormu l ate equ at i on 7.12 as f ol l ows :
Growth
n=u [i - i> f
r
i
1
- (< ? r/c? ))] (7-i3)
wh ere p '
r
now l u mp s t oget h er t h e p robabi l i t y bot h of ap p l i cat i on
and of d es t ru ct i v enes s of an op erat or r, and C
l
-'
r
is t h e corres p ond i ng
i nt ron comp l exity. Wh en f itnes s (fj) is al read y h igh , t h e p robabil ity
of imp rov ing ef f ectiv e f itnes s by ch anging act u al f itnes s is mu ch l ower
t h an at t h e beginning of t h e ru n. Bu t an ind iv id u al can continu e
t o increas e its ef f ectiv e f itnes s , ev en l ate in a ru n, by increas ing t h e
nu mber of i nt rons (C *'
r
) agains t r in its s t ru ct u re.
Fu rt h er, t h ere is no end t o t h e p red i ct ed growt h of i nt rons . Be-
cau s e t h e nu mber of i nt rons in an ind iv id u al is al ways l es s t h an t h e
abs ol u t e s ize of an ind iv id u al , t h e rat i o (s u p res s ing ind ex r ) C j / C ?
is al ways l es s t h an one. S o i nt rons cou l d grow inf initel y and continu e
t o h av e s ome ef f ect on t h e ef f ectiv e f itnes s of an ind iv id u al as l ong as
p
D
>0 .
Here are two p i ct u res of h ow t h at works in p ract i ce. Fi gu re 7.1
rep res ents a good s ol u tion of f u nctioning (non-intron) cod e t h at h as
no i nt rons . I f cros s ov er and mu t at i on are d es t ru ct i v e wi t h h igh p roba-
bil ity, t h en t h e ind iv id u al in Fi gu re 7.1 is v ery u nl ikel y t o h av e h igh l y
f it ch il d ren. I n ot h er word s , its ef f ectiv e f itnes s is l ow.
Figure 7. 1
A group of functioning
nodes. E indicates
"effective" code.
By way of cont ras t , Fi gu re 7.2 s h ows the same f u nctioning cod e.
Bu t t h e ind iv id u al in Fi gu re 7.2 is at t ach ed t o f ou rteen i nt rons . A l -
t oget h er, t h ere are f ou r cros s ov er p oi nt s t h at wou l d res u l t in break-
ing u p t h e f u nctioning cod e in t h e ind iv id u al and f ou rteen cros s ov er
p oi nt s t h at wou l d not . Th i s ind iv id u al ' s ef f ectiv e f itnes s is , th eref ore,
rel ativ el y h igh er t h an t h e ef f ectiv e f itnes s of t h e ind iv id u al in Fig-
u re 7. 1. Th at is , t h e ind iv id u al in Fi gu re 7.1 is l ikel y t o h av e ch il d ren
7. 10 Why Int r ons Gr ow Exponent ial l y
TT1
Figure 7.2
Same functioning nodes
as in Figure 7.1. Introns
(I) have been added.
th at wil l not comp ete wel l with th e ch il d ren of Figu re 7.2, ev en if
th eir regu l ar GP f itnes s is id entical .
Th e ef f ect of exp l os iv e intron growth is d ramatic. Normal l y,
cros s ov er is d es tru ctiv e more th an 75% of th e time. Bu t af ter introns
occu p y mos t of th e p op u l ation, d es tru ctiv e cros s ov er is rep l aced al -
mos t comp l etel y with neu tral cros s ov er. Wh y? A t th at p oint, th e
ind iv id u al s are ju s t s wap p ing introns with h igh er and h igh er p rob-
abil ity each generation. S wap p ing cod e th at h as no ef f ect between
two ind iv id u al s wil l h av e no ef f ect. Hence neu tral cros s ov er comes to
d ominate a ru n af ter th e exp l os iv e growth of introns .
The Effect of
Exponential Intron
Growth
We h av e p res ented a th eory abou t wh y introns grow exp onen-
tial l y. Th e th eory h as a good th eoretical bas is and al s o s ome grow-
ing exp erimental s u p p ort [Nord in et al ., 1995] [Nord in et al ., 1996]
[S ou l e and Fos ter, 1997b]. O ne ad d itional p red iction of th is th eory
is th at exp onential growth wil l come mos tl y or entirel y f rom introns
or grou p s of introns th at are, in ef f ect, terminal s . Th is is becau s e
introns th at occu r in th e mid d l e of bl ocks of f u nctioning cod e are
u nl ikel y to res u l t in neu tral cros s ov er if cros s ov er occu rs in th e in-
trons - becau s e th ere is f u nctioning cod e on eith er s id e of th e introns
and it wil l be exch anged among ind iv id u al s . S ou l e's res earch s u p -
p orts th is p red iction - bl oat ap p ears to grow at th e end of GP trees
[S ou l e and Fos ter, 1997b].
A Prediction
7 Genetic Programmi ng and Emergent Order
7.11 The Effects of Introns
Variou s ef f ects h av e been attribu ted to introns [A ngel ine, 1994]
[Nord in et al ., 1995] [A nd re and Tel l er, 1996] [Nord in et al ., 1996]
[S ou l e et al ., 1996] [Wineberg and O p p ach er, 1996]. S ome h av e ar-
gu ed th at introns may benef it ev ol u tion while oth ers argu e th at in-
trons al mos t al ways res u l t in p oor ev ol u tion and extend ed comp u ta-
tion time. Th is f iel d is v ery you ng and it may be th at al l of th es e
s tu d ies , s ome s eemingl y incons is tent, ju s t rep res ent d if f erent p oints
on th e v ery comp l ex s u rf ace th at rep res ents th e ef f ect of introns .
Mu ch more s tu d y is neces s ary bef ore anyth ing more th an tentativ e
concl u s ions may be s tated . A ccord ingl y, th is s ection wil l be d ev oted
more toward ou tl ining th e few ef f ects of introns th at may be cl earl y
s tated and , as to th e oth er ef f ects , trying to p rov id e a cl ear ou tl ine
of th e u nans wered is s u es .
We s tart by noting again th at introns are an emergent p h e-
nomenon and p robabl y exh ibit a good d eal of comp l exity and s ens i-
tiv ity to initial cond itions . I t is imp ortant, in ou tl ining th es e is s u es ,
to keep s ev eral p oints cl ear:
Introns may have differing effects before and after ex-
ponential growth of introns begins. A f ter exp onential
growth occu rs , th e exp onential ef f ect s u rel y ov erwh el ms wh at-
ev er ef f ect th e introns h ad p rev iou s l y, if any.
Different systems may generate different types of in-
trons wi th different probabilities. I t may, th eref ore, be
h ard er to generate introns in s ome GP s ys tems th an in oth ers
[McPh ee and Mil l er, 1995].
The extent to which genetic operators are destructive
in their effect is likely to be a very important initial
condition in intron growth. E qu ation 7.12 and Ros ca's work
[Ros ea, 1997] p red ict th at th e maximu m extent to which intron
growth can mod if y ef f ectiv e f itnes s is equ al or p rop ortional to
p
D
(th e p robabil ity of d es tru ctiv e cros s ov er). Fu rth ermore, th e
ef f ect of any giv en ch ange in th e ratio C
l
/ C on ef f ectiv e f it-
nes s wil l be p rop ortional to p
D
. Th is u nd erl ines th e imp or-
tance of meas u ring and rep orting on d es tru ctiv e, neu tral , and
cons tru ctiv e cros s ov er f igu res wh en d oing intron research (s ee
Chapter 6).
LI Mutati on and crossover may affect different types of in-
trons differently. How th is works may d ep end on th e s ys tem,
th e f u nction s et and th e mix of genetic op erators .
7.11 The Effects of Introns
mj
A f u nction s et t h at u s es no cond itional s can generat e in-
t rons (a = a + 0). S u ch i nt rons wil l be ch anged , wi t h h igh
p robabil ity, into f u nctioning cod e by t h e mu t at i on op er-
at or [Banzh af et al ., 1996]. A d d i ng more mu t at i on wil l ,
th eref ore, ch ange t h e initial cond itions of t h e s tew.
O n t h e ot h er h and , ad d i ng cond itional branch i ng creates
t h e p os s ibil ity of s u ch i nt rons as I f 2 < 1 t h e n X. I f X
rep res ents a s u bt ree of any l ength , bot h X and each nod e
of X wou l d be i nt rons . Howev er, u nl ike t h e examp l e in
t h e p rior p ar agr ap h , X t yp e introns wil l be qu i t e i mmu ne
t o mu t at i on wi t h i n X. A gain t h e initial cond itions are
ch anged .
[J Final l y, it is i mp or t ant t o d is tingu is h bet ween emergent introns
and artif ical i nt ron equ iv al ents . I n mos t s ys tems , t h e exis tence
and growt h of artif ical intron equ iv al ents is more or l es s f ree
t o t h e s ys t em - a gif t f rom t h e p rogrammer s o t o s p eak. Th i s
may wel l make artif icial intron equ iv al ents mu ch more l ikel y t o
engage in exp onent i al growt h t h an emergent i nt rons .
Wi t h t h i s in mi nd , h ere are s ome ref l ections on t h e p os s ibl e ben-
ef its and d rawback of introns .
7. 11. 1 Probl ems Caused by Int rons
Res earch ers h av e id entif ied p os s ibl e p robl ems cau s ed by i nt rons , in-
cl u d ing r u n s t agnat i on, p oor res u l ts , and a h eav y d rai n on memory
and C PU t i me.
Ru n s t agnat i on ap p ears t o be, in p ar t , a res u l t of bl oat - t h e Run Stagn ation an d
exp onential growt h of introns . Th i s ef f ect is not s omet h i ng f or wh ich Bloat
t h e res earch er s h ou l d s triv e. O nce t h e p op u l at i on is s wap p ing onl y
introns d u ri ng cros s ov er, no i mp rov ement is l ikel y t o come in t h e bes t
or any ot h er ind iv id u al . A l l ef f ectiv e growt h h as end ed .
O ne migh t argu e t h at exp onent i al i nt ron growt h is not real l y
i mp ort ant becau s e it merel y ref l ects t h at t h e ru n is ov er. Th at is ,
th e argu ment goes , ind iv id u al s in t h e ru n cannot imp rov e, giv en t h e
p robl em and t h e s t at e of t h e p op u l at i on. Th at i nt rons exp l od e at t h i s
p oint is th eref ore of no cons equ ence. Wh i l e t h i s may be p ar t l y t ru e,
s t agnat i on d u e t o i nt ron growt h is p robabl y t h e res u l t of a balan ce
between t h e p robabi l i t y of d es t ru ct i v e cros s ov er and t h e ext ent t o
wh ich ch anges in ef f ectiv e f itnes s may be more eas il y f ou nd by f ind ing
bet t er s ol u tions or by ad d i ng i nt rons (s ee equ at i on 7.12). O f cou rs e,
it is more d if f icu l t t o f ind bet t er s ol u tions af ter qu i t e s ome ev ol u tion
h ad al read y occu rred . Bu t t h at d oes not mean t h at it is imp os s ibl e
IL'U
7 Genetic Programmi ng and Emergent Order
or ev en i mp robabl e, j u s t l es s l ikel y. Th u s , it is qu i t e p os s ibl e t h at t h e
eas e of imp rov ing ef f ectiv e f itnes s by ad d i ng i nt rons j u s t ov erwh el ms
t h e s l ower real ev ol u tion t h at occu rs toward t h e end of a ru n. I f t h i s
h yp oth es is is correct, t h en t h e exp onential growt h of i nt rons wou l d
p rev ent t h e p op u l at i on f rom f ind ing bet t er s ol u tions . Th i s p os s ibil ity,
of cou rs e, becomes great er and great er as t h e d es t ru ct i v e ef f ects of
cros s ov er become greater.
O ne s t u d y s u gges ts t h at ef f ectiv e ev ol u tion may be ext end ed (and
s t agnat i on av erted f or at l eas t a wh il e) by increas ing t h e mu t at i on
rat e in a s ys t em wh ere mu t at i on conv erts introns t o f u nctional cod e
wi t h h igh p robabil ity. I n t h e h igh mu t at i on ru ns , t h e d u r at i on of
t h e ru ns was ext end ed s ignif icantl y bef ore s t agnat i on, t h e nu mber of
i nt rons in t h e p op u l at i on was red u ced , and bet t er ov eral l s ol u tions
were f ou nd [Banzh af et al ., 1996].
Poor Results Res earch ers [A nd re and Tel l er, 1996] [Nord in et al ., 1995] rep ort -
ing p oor bes t ind iv id u al f itnes s res u l ts h av e at t r i bu t ed th os e res u l ts
t o i nt rons . A nd re et al . rep ort ed v ery bad res u l ts wh en t h ey ad d ed a
f orm of artif icial i nt ron equ iv al ents t o t h ei r s ys t em. Th ey ad d ed nod es
t h at were d el i berat el y d es igned t o d o not h i ng bu t t ake u p s p ace in t h e
cod e. Nord in et al . ad d ed exp l icitl y d ef ined i nt rons (E DI ) (anot h er
t yp e of artif icial intron equ iv al ents ), wh ich al l owed t h e p robabi l i t y
of cros s ov er t o be ch anged at each p ot ent i al cros s ov er p oi nt . We re-
p ort ed good res u l ts u p t o a p oint bu t wh en it became t oo eas y f or
t h e s ys t em t o increas e t h e E DI v al u es , ev ol u tion t end ed t o f ind l ocal
mi ni ma v ery qu ickl y.
I t is d if f icu l t t o as s es s h ow general eith er of t h es e res u l ts is . O ne
p os s ibl e exp l anat i on f or t h e res u l ts is s u gges ted by t h e argu ment
abov e regard i ng bal ance. Bot h s t u d i es mad e it v ery eas y t o ad d in-
t rons in t h e exp eri ment s t h at s h owed bad res u l t s . Th e eas ier it is t o
ad d i nt rons , t h e s ooner one wou l d exp ect t h e bal ance between im-
p rov ing f itnes s , on t h e one h and , and ad d i ng i nt rons , on t h e oth er,
t o t i p in f av or of ad d i ng i nt rons and t h u s cau s e exp onent i al growth .
By maki ng it s o eas y t o ad d i nt rons , exp onent i al growt h may h av e
been accel erated , cau s ing ev ol u tion t o s t agnat e earl ier. I n bot h s t u d -
ies , maki ng it h ard er f or t h e s ys t em t o generat e i nt rons s eemed t o
imp rov e p erf ormance.
S ome s u p p or t f or t h i s t ent at i v e concl u s ion is l ent by anot h er
s t u d y t h at u s ed exp l icitl y d ef ined i nt rons s imil ar t o ou rs bu t ev ol v ed
t h em d if f erentl y. A ngel ine [A ngel ine, 1996] i ns ert ed E DI s i nt o a tree-
bas ed s ys t em. He mad e it qu i t e d if f icu l t f or t h e i nt rons t o ch ange
v al u es rap i d l y by t r eat i ng t h e E DI v ector as an ev ol v abl e ev ol u tion-
ary p rogrammi ng v ector. Th u s , growt h was regu l at ed by Gau s s ian
d i s t ri bu t i ons arou nd t h e earl ier E DI v ectors . Th i s ap p roach l ed t o
excel l ent res u l ts .
7. 11 The Effects of Introns MVfi
Th e comp u t at i on bu rd en of introns is u nd i s p u t ed . I nt rons occu p y Computation al Burden
memory and t ake u p v al u abl e C PU t i me. Th ey cau s e s ys tems t o p age
and ev ol u tion t o grind t o a h al t .
7. 11. 2 Possible Beneficial Effects of Int rons
Th ree d if f erent benef its may be at t r i bu t abl e t o i nt rons .
A l t h ou gh i nt rons t end t o creat e l arge s ol u tions f il l ed wi t h cod e
t h at h as no f u nction, t h ey may t end t o p r omot e p ars i mony in t h e
real cod e - t h at is , t h e cod e t h at comp u t es a s ol u tion. A s not ed el s e-
wh ere, s h ort ef f ectiv e comp l exity is p robabl y correl ated wi t h general
and robu s t s ol u tions . I ronical l y, u nd er s ome ci rcu ms t ances , t h eory
s u gges ts t h at i nt rons may act u al l y p art i ci p at e in a p roces s t h at p ro-
motes p ars i moni ou s ef f ectiv e s ol u tions and t h at t h i s is an emergent
p rop ert y of GP [Nord in and Banzh af , 1995a].
Recal l equ at i on 7.12. I t may be rewri t t en as f ol l ows t o make it
eas ier t o s ee t h e rel at i ons h i p between p ars i mony and introns :
f
e
= f-[l-p
D
-(C
e
/C
a
)] (7.14)
s u p res s ing ind ices j and r.
I f C
e
is equ al t o C
a
, t h ere are no introns in t h e ind iv id u al . I n
t h at cas e, t h e inf l u ence of d es t ru ct i v e cros s ov er on t h e ef f ectiv e f it-
nes s of an ind iv id u al is at its maxi mu m. O n t h e ot h er h and , if t h ere
are i nt rons in t h e ind iv id u al , a red u ct i on in C
e
increas es its ef f ec-
tiv e f itnes s . Wh en C
e
is s mal l er, t h e s ol u tion is more p ars i moni ou s
[Nord in and Banzh af , 1995a]. Th e cond itions t h at wou l d t end t o p ro-
mot e s u ch a f actor are:
A h igh p robabi l i t y of d es t ru ct i v e cros s ov er.
S ome i nt rons in t h e p op u l at i on (al mos t nev er a p robl em).
A s ys t em t h at makes it rel ativ el y eas ier t o red u ce t h e amou nt
of ef f ectiv e cod e t h an t o ad d more i nt rons .
S ou l e' s work t end s t o s u p p ort t h e p red iction of equ at i on 7.14.
Wh en no d es t ru ct i v e cros s ov er is al l owed , t h e amou nt of ef f ectiv e
cod e (cod e t h at h as an ef f ect on t h e beh av ior of t h e GP ind iv id -
u al ) is s ignif icantl y h igh er t h an wh en normal , d es t ru ct i v e cros s ov er is
p ermi t t ed . Th e ef f ect p ers is ts in v i rt u al l y al l generations and grows
as t h e r u n continu es [S ou l e and Fos ter, 1997b]. Th u s , t h e p red i ct i on
t h at ef f ectiv e f itnes s wil l t end t o comp res s t h e ef f ectiv e cod e of GP
ind iv id u al s and t h at t h e ef f ect wil l be more p ronou nced as t h e d e-
s tru ctiv enes s of cros s ov er increas es now h as s ignif icant exp eri ment al
s u p p ort .
Compression and
Parsimony
111:1 7 Ge ne t i c Pr og r a mmi n g and Eme r g e n t Or de r
Structural Protection
Against Crossover
Global Protection
Against Crossover and
Bloat
Res earch ers h av e al s o s u gges ted t h at i nt rons may p rov id e a s ort
of s t r u ct u r al p rot ect i on agains t cros s ov er t o GP bu il d ing bl ocks d u r-
ing t h e earl ier s tages of ev ol u tion. Th i s wou l d occu r if bl ocks of
i nt rons d ev el op ed in a way s o t h at t h ey separated bl ocks of good
f u nctional cod e. Th u s , t h e i nt ron bl ocks wou l d t end t o at t r act cros s -
ov er t o t h e i nt rons , maki ng it more l ikel y t h at cros s ov er wou l d be
s wap p ing good f u nctional bl ocks of cod e ins tead of breaki ng t h em
u p .
1 0
Th i s is v ery s imil ar t o Wat s on et al .' s v iew of biol ogical i nt rons
in t h e qu ot at i on abov e.
I t is i mp or t ant t o d is tingu is h between th is structural ef f ect of
introns and t h e global ef f ect (exp l os iv e i nt ron growt h ef f ect) d is cu s s ed
abov e. Th e two t yp es of intron ef f ects s h ou l d h av e v ery d if f erent
res u l ts and s h ou l d l ook v ery d if f erent.
Th e gl obal ef f ect u s u al l y h as a v ery bad ef f ect on GP ru ns .
I t p rot ect s t h e en tire in dividual f rom t h e d es t ru ct i v e ef f ects of
cros s ov er. I t is p robabl y i mp l ement ed wh en cros s ov er s wap s
grou p s of introns t h at are, ef f ectiv el y, t ermi nal s .
Th e s t r u ct u r al ef f ect wou l d , on t h e ot h er h and , t end t o p rot ect
blocks of effective code f rom t h e d es t ru ct i v e ef f ects of cros s ov er -
not t h e entire ind iv id u al . Unl ike gl obal p rot ect i on, wh ich al -
mos t al ways h as negativ e ef f ects , s t r u ct u r al p rot ect i on cou l d be
v ery benef icial if it al l owed bu il d ing bl ocks t o emerge d es p ite
t h e d es t ru ct i v e ef f ects of cros s ov er and mu t at i on.
Th i s s t r u ct u r al ef f ect wou l d l ook cons id erabl y d if f erent t h an t h e
gl obal ef f ects of i nt rons d is cu s s ed abov e. S t r u ct u r al p rot ect i on wou l d
be ch aract eri zed by grou p s of i nt rons between grou p s of f u nctional
cod e i ns t ead of i nt rons t h at were, ef f ectiv el y, t ermi nal s . I n f act, in
l inear genome exp eri ment s , t h e au t h ors h av e l ocated a t end ency f or
i nt rons and f u nctional cod e t o grou p t oget h er. I t can be obs erv ed by
l ooking at t h e d ev el op ment of t h e s o-cal l ed i nt ron map wh ich s h ows
t h e d i s t ri bu t i on of ef f ectiv e and i nt ron cod e in a genome.
In tron Maps Fi gu re 7.3 s h ows s u ch an i nt ron map . I t record s , ov er t h e gen-
erat i ons , t h e f eatu re of p art i cu l ar l ocations on t h e genome, wh et h er
t h ey are i nt rons or not. Th e f igu re was t h e res u l t of a p at t er n recog-
nition ru n wi t h GP. I n t h e earl y generat i ons , t h e l engt h of p rograms
qu ickl y increas es u p t o t h e maxi mu m al l owed l engt h of 250 l ines of
cod e. Th e f u rth er d ev el op ment l ead s t o a s tabil ization of t h e f eatu re
at each l ocation, wh ich in t h e beginning h ad been s witch ing back and
f orth bet ween ef f ectiv e and i nt ron cod e.
10
Th e th eoretical bas is f or th is id ea is f ormal ized in [Nord in et al ., 1995]
[Nord in et al ., 1996]. A ngel ine's res u l ts with exp l icitl y d ef ined introns tend
to s u p p ort th is h yp oth es is [A ngel ine, 1996].
7. 12 Wha t t o Do a bou t Int r ons
KIM
Intron-Map
! i i ! i i !
i l i i i i i !
i ! l
il I i i : Hi
Hi! I I I ! ; !
! ! | ' ' ! ill :
! i i ; i j >
:!!!!! i!!!
I
: ! i ! l i Jl l j l ! l l | ! | | l l i l j : ! | i l ! ! | l ! JI ! ! ! l i ! J! ! i ! i ! ! !
; : M
n
: ! i i :
hi
il
i i i i i l i i i i i
nil
i Nl i ' l l i
I' ! ! ! ' ' '!
i i i i i l i
I I I
II I I I I I |i!M I : j ' :! i l !
ilii:ij; ii! iiJ! ill! iJi
i i i ! ! ! ! ! !
I! ! ! i l l !
:i i : ; iii
i l i i i i :ni ; i
li : : : [ l : l l l l ! l l l l ! i l l l ! l l l l l l l ! l ! l l l l l l !
:
i ! i ! ; : ; ; i i ; ; ; ; ; ; ; ; i ; i ; ! ; ; i ! ;
:
; i ; i i ; ; ; ; ; ;
! i i ; l l l l ! I MI I I I ! l i MM! i i
: : ! ! ' ! ! ! ! ! n! i ! ! > I i ! ! M!
!
! i
{jjijliiiiiiiiiiilliljiiii!
in
! ! : ! i ! ! ! ! : ! ! ! ! ! i ! ! ! i ! !
j i l l ! ! ! ! :
11H11H t i I! i M!! M! IU! IM! MI i n [ i
0 500000 1e*06 15e +06 2e+06 2 50+06 38+06 3 5o+06 Ae*OB 4 5e *06 Se06
Toumaments
7.12 What t o Do about Introns
Th e abov e equ at i ons and ot h er exp eri ment al res u l ts s u gges t s ev eral
d irections f or control l ing and p os s ibl y h arnes s ing introns .
7.12.1 Reduction of Destructive Effects
Figure 7.3
Development of an intron
map over the course of a
run. Introns are drawn in
black; effective code is
left white.
I n C h ap t er 6 t h e d es t ru ct i v e ef f ect of cros s ov er was d is cu s s ed at
s ome l ength al ong wi t h recent at t emp t s t o imp rov e t h e cros s ov er
op erat or. E qu at i on 7.12 s u gges ts t h at red u ci ng t h e d es t ru ct i v enes s
of cros s ov er wil l , its el f , red u ce t h e t end ency of i nt rons t o emerge
or at l eas t p os t p one t h e t i me at wh ich exp onent i al growt h begins
[S ou l e and Fos ter, 1997b].
Th eref ore, al l of t h e d if f erent tech niqu es exp l ored in C h ap t er 6
f or imp rov ing t h e cros s ov er op erat or - brood recombi nat i on, exp l ic-
itl y d ef ined introns , intel l igent cros s ov er op erat ors , and t h e l ike -
are l ikel y t o h av e a meas u rabl e ef f ect on GP bl oat. We argu ed in
t h at ch ap t er t h at t h e es s ence of t h e p robl em with t h e GP cros s ov er
op erat or is t h at it f ail s t o mi mi c t h e h omol ogou s nat u r e of biol ogi-
cal recombi nat i on. Th e p robl em of bl oat may be v iewed in a more
general way as t h e abs ence of h omol ogy in GP cros s ov er.
O f cou rs e, it wou l d be eas y t o t ake red u cing t h e d es tru ctiv enes s
of cros s ov er t oo f ar. We wou l d not want t o red u ce t h e d es t ru ct i v e
ef f ect of cros s ov er t o zero, or GP wou l d become j u s t a h il l cl imber.
K i U 7 Genetic Programmi ng and Emergent Order
7. 12. 2 Parsimony
Th e ef f ect of p ars imony p res s u re is t o at t ach a p enal t y t o t h e l engt h of
p rograms . Th u s , a l onger s ol u tion wil l be au t omat i cal l y d owngrad ed
in f itnes s as comp ared t o a s h ort s ol u tion. Wh er eas t h i s wil l p rev ent
i nt rons f rom growing exp onential l y, it d ep end s on t h e s t r engt h of
t h at p enal t y at wh at p oint in ev ol u tion i nt rons become s u p p res s ed
al t oget h er.
Fi gu re 7.4 s h ows an A I MGP ru n wi t h p ars i mony p res s u re. Fig-
u re 7.5 s h ows a s imil ar ru n, t h ou gh wi t h ou t t h i s p res s u re. Wh er eas
initial l y bot h ru ns l ook t h e s ame, t h e ru n wi t h p ars i mony p res s u re
s u cceed s in s u p p res s ing i nt rons , ef f ectiv el y p roh i bi t i ng exp l os iv e in-
t ron growt h .
Figure 7.4
Length of program during
evolution with parsimony
pressure in AIMGP
in
.E
L
e
n
g
t
h
!
300
250
200
150
100
50
Absol ute Compl exi ty and Effective Compl exi ty
"Absol ute Lengt h" -
"Effective L engt h-
- /^"A
" I \
L\
j \V
5 10 15 20 25 30 35 40
Generations
7. 12. 3 Changing t he Fitness Funct ion
C h angi ng t h e f itnes s f u nction d u ri ng a ru n may al s o h el p t o s u p p res s
exp l os iv e i nt ron growth . Wh en t h e f itnes s f u nction becomes v ariabl e,
GP ind iv id u al s migh t f ind ways t o imp rov e t h ei r f itnes s , d es p ite t h e
f act t h at t h ey migh t h av e s t agnat ed u nd er a cons t ant f itnes s f u nction.
I f , f or i ns t ance, one were t o ch ange a s p ecif ic p ar amet er in t h e f itnes s
f u nction f or t h e s ol e p u rp os e of keep ing t h e GP s ys t em bu s y f ind ing
bet t er f itnes s v al u es , th is wou l d great l y red u ce t h e p robabi l i t y of a
ru n get t i ng s tu ck in exp l os iv e i nt ron growth . Fi t nes s f u nctions migh t
j u s t as wel l ch ange grad u al l y or in ep och s ; t h e l at t er t ech ni qu e is al s o
u s ed f or ot h er p u rp os es . E v en a f itnes s f u nction t h at is cons t ant l y
ch angi ng d u e t o co-ev ol u tion wil l h el p av oid exp l os iv e i nt ron growt h .
7.12 What to Do about Introns
win
Absolute Complexity and Effective Complexity
Figure 7.5
Length of program during
evolution without
parsimony pressure in
AIMCP
0 5 10 15 20 25 30 35 40
Generations
Exercises
1. Giv e two examp l es t h at cou l d be s een as GP ev ol v ing its own
rep res ent at i on.
2. Giv e t h ree examp l es of i nt rons in GP.
3. Wh at is an artif icial intron equ iv al ent?
4. Wh a t is ef f ectiv e f itnes s ? E xp l ai n t h e d if f erence bet ween ef f ec-
tiv e and abs ol u t e f itnes s .
5. Name a benef icial ef f ect of an intron f or an ind iv id u al . Wh at is
a d et ri ment al ef f ect of an i nt ron?
6. I s it p os s ibl e t o f ind cod e s egments t h at are i nt rons agains t
cros s ov er, bu t not agains t mu t at i on?
7. Giv e t h ree examp l es of h ow an ind iv id u al can increas e its ef f ec-
tiv e f itnes s .
8. Des cribe two met h od s of p rev enting exp onent i al intron growt h .
EH
7 Genetic Programmi ng and Emergent Order
Further Reading
D. A nd re and A . Tel l er,
A S TUDY I N PRO GRA M RE S PO NS E A ND THE NE GA TI VE E FFE C TS
O F I NTRO NS I N GE NE TI C PRO GRA MMI NG.
I n J.R. Koza, D.E . Gol d berg, D.B. Fogel , and R.L. Riol o (ed s .),
GE NE TI C PRO GRA MMI NG 1996:
PRO C E E DI NGS O F THE FI RS T A NNUA L C O NFE RE NC E .
MI T Pres s , C ambrid ge, MA , 1996.
P.J. A ngel ine,
GE NE TI C PRO GRA MMI NG A ND E ME RGE NT I NTE LLI GE NC E .
I n K.E . Kinnear, Jr. (ed .),
A DVA NC E S I N GE NE TI C PRO GRA MMI NG.
:
MI T Pres s , C ambrid ge, MA , 1994.
P.J. A ngel ine,
Two S E LF- A DA PTI VE C RO S S O VE R O PE RA TO RS
FO R GE NE TI C PRO GRA MMI NG.
I n P.J. A ngel ine and K.E . Kinnear, Jr. (ed s .), , !
A DVA NC E S I N GE NE TI C PRO GRA MMI NG 2.
MI T Pres s , C ambrid ge, MA , 1996.
W. Banzh af , F.D. Francone, and P. Nord in,
THE E FFE C T O F E XTE NS I VE US E O F THE MUTA TI O N O PE RA TO R
O N GE NE RA LI ZA TI O N I N GE NE TI C PRO GRA MMI NG
US I NG S PA RS E DA TA S E TS .
I n H. Voigt, W. E bel ing, I . Rech enberg, and H. S ch wef el (ed s .),
PRO C . PPS N I V,
S p ringer, Berl in, 1996.
P. Nord in, F.D. Francone, and W. Banzh af ,
E XPLI C I TLY DE FI NE D I NTRO NS A ND DE S TRUC TI VE C RO S S O VE R
I N GE NE TI C PRO GRA MMI NG.
I n P.J. A ngel ine and K.E . Kinnear, Jr. (ed s .),
A DVA NC E S I N GE NE TI C PRO GRA MMI NG 2.
MI T Pres s , C ambrid ge, MA , 1996.
T. S ou l e, J.A . Fos ter, and J. Dickins on,
C O DE GRO WTH I N GE NE TI C PRO GRA MMI NG.
I n J.R. Koza, D.E . Gol d berg, D.B. Fogel , and R.L. Riol o (ed s .),
GE NE TI C PRO GRA MMI NG 1996:
PRO C E E DI NGS O F THE FI RS T A NNUA L C O NFE RE NC E .
MI T Pres s , C ambrid ge, MA , 1996.
8 Analysis Improving
Genetic Programming
wit h Statistics
C ontents
8. 1 Statistical Tools for GP 205
8.1.1 Basic Statistics Concepts 205
8.1.2 Basic Tools for Genetic Programming 205
8.2 Offline Preprocessing and Analysis 209
8.2.1 Feature Representation Constraints 210
8.2.2 Feature Extraction 210
8.2.3 Analysis of Input Data 214
8.3 Offline Postprocessing 216
8.3.1 Measurement of Processing Effort 216
8.3.2 Trait Mining 218
8.4 Analysis and Measurement of Online Dat a . 219
8.4.1 Online Data Analysis 219
8.4.2 Measurement of Online Data 219
8.4.3 Survey of Available Online Tools 220
8.5 Generalization and Induction 229
8.5.1 An Example of Overfitting
and Poor Generalization 230
8.5.2 Dealing with Generalization Issues 233
8.6 Conclusion 235
EiH
8 Analysis Improvi ng Genetic Programmi ng wi t h Statistics
Th e f oregoing ch ap t ers es tabl is h ed s ome t h eoret i cal grou nd i ng f or ge-
netic p rogrammi ng. Nev erth el es s , GP is 99% an experimen tal met h od -
ol ogy. Like nat u r al ev ol u tion, GP p rod u ces comp l ex and emergent
p h enomena d u ri ng t rai ni ng (s ee C h ap t er 7) and , as in nat u r al ev ol u -
tion, p red i ct i ng t h e res u l ts of ch anges in a GP s ys t em is d if f icu l t. I n
ot h er word s , t h e gap between t h eory and p ract i ce is wid e ind eed .
To il l u s trate t h i s p oint, as s u me t h at GP ru n 1 p rod u ces a good re-
s u l t and continu es f or 200 generations bef ore intron exp l os ion occu rs .
For GP ru n 2, onl y t h e r and om s eed is ch anged . A l l ot h er p ar amet er s
are t h e s ame as f or GP ru n 1. Bu t GP ru n 2 cou l d eas il y p rod u ce
a bad res u l t and t er mi nat e af ter onl y 15 generations becau s e of in-
t ron exp l os ion. S u ch wid e v ariances in res u l ts are typ ical in genetic
p rogrammi ng.
A s a res u l t, meas u ri ng wh at is going on bef ore, d u ri ng, and af ter
a GP r u n and meas u ri ng its s ignif icance is i mp or t ant f or at l eas t t h ree
reas ons :
1. Dy na mi c Ru n Cont rol
} ' * 8
O ne wou l d l ike t o be abl e t o u s e t h e inf ormation t o control t h e
ru n its el f .
2. Da t a Pr e pr oc e s s i ng
I t is good t o p res ent t h e d at a t o t h e GP s ys t em in a way t h at
maxi mi zes t h e ch ance of t es t abl e, u s ef u l p red i ct i ons .
3. Si gni f i cance or Me a ni ng of Ru n
I t is i mp or t ant t o i nt erp ret t h e res u l ts of t h e r u n f or mean-
ing and s t at i s t i cal s ignif icance - t h at is , d oes an ev ol v ed GP
ind iv id u al h av e any s tatis tical l y v al id p red ictiv e v al u e?
On lin e A n alysis Tools Th i s ch ap t er ref ers t o meas u rement s mad e d u ri ng a GP r u n as
"onl ine meas u rement s . " O nl ine meas u rement s of f itnes s h av e been
wi t h GP s ince its beginning [Koza, 1992d ]. I n 1995, res earch ers
s t art ed s ys t emat i cal l y t o meas u re ot h er as p ect s of GP ru ns onl ine,
s u ch as i nt rons , ef f ectiv e s ize, and cros s ov er res u l ts .
Offlin e A n alysis Tools "O f f l ine" anal ys is tool s are meas u rement s and s t at i s t i cal anal ys is
p erf ormed bef ore and af ter GP ru ns . Typ ical of f l ine tool s incl u d e
d at a p rep roces s ing and s t at i s t i cal anal ys is of wh et h er a GP ru n is
"general izing" wel l t o d at a it h as not yet s een.
Th i s ch ap t er begins wi t h s ome bas ic s t at i s t i cal concep t s s u ch as
p op u l at i ons and s amp l es , and s ev eral el ement ary s t at i s t i cal t es t s t h at
are wid el y ap p l icabl e in GP. Th en, we l ook at ways t o u s e bot h onl ine
and of f l ine tool s in anal yzing and imp rov ing GP ru ns .
8.1 Stati sti cal Tools for GP BdiU
8. 1 St at ist ical Tool s for GP
8.1.1 Basic Statistics Concepts
By statistical population we mean t h e entire grou p of ins tances (mea- Statistical Population
s u red and u nmeas u red ) abou t wh ich one wis h es t o d raw a concl u s ion.
I f , f or examp l e, one wis h ed t o know h ow many men l iv ing in t h e city
of Dor t mu nd , Germany, weigh ed more t h an 100 kg, t h e s t at i s t i cal
p op u l at i on t o exami ne wou l d be al l men l iv ing in Dor t mu nd .
1
A sample is a s u bs et of a s t at i s t i cal p op u l at i on. To comp ris e Sample
a s amp l e, t h e s u bs et mu s t be d rawn rand oml y f rom t h e s t at i s t i cal
p op u l at i on and t h e d raws mu s t be i nd ep end ent of each ot h er (s ee
C h ap t er 3).
Many p op u l at i ons cannot be meas u red as a whole. O f ten, t h e
bes t we can d o is t o s el ect a s amp l e f rom t h e p op u l at i on (s ay, 1000
of t h e men wh o l iv e in Dor t mu nd ) and meas u re t h ei r h eigh ts . We
wou l d h op e t h at t h e d i s t ri bu t i on of men' s h eigh ts in t h at s amp l e is
rep res ent at i v e and wou l d l et u s es t i mat e t h e d i s t ri bu t i on of h eigh ts
in t h e entire mal e p op u l at i on of Dor t mu nd .
S t at i s t i cs as a d is cip l ine d oes not giv e bl ack and wh i t e ans wers .
I t giv es p robabil ities t h at cert ai n meas u rement s or f ind ings wil l be
rep l icated on s u bs equ ent s amp l ings f rom t h e p op u l at i on. For in-
s t ance, s u p p os e t h at t h e 1000-man s amp l e f rom Dor t mu nd h ad a
mean weigh t of 80 kg wi t h a s t and ar d d ev i at i on of 7 kg. S t at i s t i ci ans
can es t i mat e t h e p robabi l i t y t h at a s econd s amp l e of 1000 men f rom
Dor t mu nd wil l weigh , on av erage, 110 kg. Th e p robabi l i t y wou l d be
v ery l ow. Bu t s t at i s t i cs cou l d not s ay t h at t h i s ev ent cou l d not occu r.
Th e statistical sign ifican ce level is a p ercent age v al u e, ch os en f or Statistical Sign ifican ce
j u d gi ng t h e v al u e of a meas u rement . Th e h igh er t h e l ev el ch os en, Level
t h e more s tringent t h e t es t . S t at i s t i cal s ignif icance l ev el s ch os en are
u s u al l y v al u es f rom 95% t o 99%.
8.1.2 Basic Tools for Genetic Programming
Th ere are many s t at i s t i cal tool s av ail abl e t o t h e GP res earch er. Th i s Gen erically A pplicable
s ection is a brief s u rv ey of bas ic tool s t h at ap p l y generical l y t o mea- Tools
s u rement s t aken f rom s amp l es d rawn f rom p op u l at i ons . Th ey s h ou l d ,
th eref ore, be cons id ered wh enev er a meas u rement is mad e of a s amp l e
d rawn f rom a p op u l at i on in GP.
1
"S tatis tical p op u l ation" is of f beat terminol ogy - s tatis tics texts wou l d
ref er to al l men l iv ing in Dortmu nd as th e "p op u l ation." Howev er, th e term
population al read y h as a s p ecial meaning in GP. Th eref ore, we wil l u s e th e
term statistical population to ref er to wh at ord inary s tatis tics l iteratu re
wou l d cal l a "p op u l ation."
ES3
8 Analysis Improving Genetic Programmi ng wi t h Statistics
How t o cal cu l ate t h e s t at i s t i cs ref erred t o in t h i s s ection may be
eas il y f ou nd in any bas ic t ext or h and book on s t at i s t i cs .
Conf i dence Int erval s
A conf id ence interv al is a range arou nd a meas u red occu rrence of
an ev ent (exp res s ed as a p ercentage) in wh ich t h e s t at i s t i ci an es ti-
mat es a s p ecif ied p ort i on of f u tu re meas u rement s of t h at s ame ev ent.
Th e conf id ence interv al exp res s es h ow mu ch weigh t a p art i cu l ar p ro-
p ort i on is ent i t l ed t o. A narrow conf id ence interv al means t h at t h e
meas u rement is accu rat e. A wid e one means t h e op p os ite. Normal l y,
conf id ence interv al s are meas u red at t h e 95% and 99% s t at i s t i cal s ig-
nif icance l ev el s .
Con fiden ce In tervals in Wh at f ol l ows is a real -worl d examp l e of t h e u s e of conf id ence in-
the Real World terv al s t o d et ermi ne t h e f eas ibil ity of red es igning a GP s ys t em. Th e
i mp ort ance of meas u ri ng GP i nt rons h as been d is cu s s ed el s ewh ere
(s ee C h ap t er 7). Let u s as s u me a GP p op u l at i on (not a s t at i s t i cal
p op u l at i on) s ize of 3000 p rograms . To meas u re t h e p ercent age of
nod es in t h e GP p op u l at i on t h at are i nt rons , t h e statistical p op u -
l ation is comp ris ed of ev ery nod e of ev ery ind iv id u al in t h e entire
GP p op u l at i on. I f t h e av erage ind iv id u al is 200 nod es in s ize, t h e
s t at i s t i cal p op u l at i on s ize is l arge - 600 000 nod es .
S omet i mes it is p os s ibl e t o t ake t h e meas u re of t h e en tire p op -
u l at i on. I n f act, one recent s t u d y d id meas u re t h e av erage nu m-
ber of i nt rons p er ind iv id u al f or t h e entire s t at i s t i cal p op u l at i on
f or ev ery generat i on. Doing it t h at way was very t i me cons u mi ng
[Francone et al ., 1996].
A f ter comp l et i ng t h at s tu d y, we began t o l ook f or ways t o s p eed
u p i nt ron ch ecking. O ne s u gges tion was t o t ake a s amp l e of , p erh ap s ,
1000 nod es (ou t of t h e 600 000 nod es ) and meas u re i nt rons in t h e
s amp l e. Th i s s amp l e cou l d be u s ed t o es t i mat e t h e p ercent age of
i nt rons f or t h e entire p op u l at i on - red u cing t h e t i me u s ed f or i nt ron
ch ecking by a f actor of 600.
Th e p ayof f f rom t h i s ap p roach is cl ear. Bu t wh at wou l d be l os t?
S u p p os e t h at 600 of t h e 1000 s amp l ed nod es were i nt rons . Does
t h i s mean t h at 60% of t h e entire 600 000 nod e p op u l at i on are com-
p ris ed of introns ? No, it d oes not . Th e 95% conf id ence interv al f or
t h i s meas u red v al u e of 60% is act u al l y between 57% and 63%. Th i s
means , in 95% of al l 1000-nod e s amp l es d rawn f rom t h e s ame GP
p op u l at i on, bet ween 57% and 63% of t h e nod es wil l l ikel y be i nt rons .
Viewed anot h er way, we cou l d s ay t h at t h e p robabi l i t y is l es s t h an
5% t h at a 1000-nod e s amp l e d rawn f rom t h e s ame GP p op u l at i on
wou l d h av e f ewer t h an 570 i nt rons or more t h an 630 i nt rons . I n a
ru n of t wo-h u nd red generations , h owev er, one wou l d exp ect at l eas t
8. 1 Statistical Tools for GP
t en generat i ons wi t h anomal ou s res u l ts j u s t f rom s amp l i ng error. S o
we d ecid ed t o ru n i nt ron ch ecks on abou t 2000 rand oml y gat h ered
nod es p er generat i on. Th i s t i gh t ened u p t h e conf id ence interv al t o
between 59% and 61%.
I n GP work, cal cu l at i ng conf id ence interv al s on p rop ort i ons is im-
p or t ant - i nt u i t i on abou t p rop ort i ons and h ow s ignif icant t h ey ou gh t
t o be are f requ entl y wrong. Wh at wou l d h ap p en t o conf id ence inter-
v al s if t h e s amp l e s ize of 1000 f el l t o a more typ ical GP l ev el of t h i rt y
s amp l es ? O f th os e t h i rt y nod es , s u p p os e t h at 60% (18 nod es ) were
introns. Wou l d we be as conf id ent in t h i s 60% meas u re as we were
wh en t h e s amp l e s ize was 1000? O f cou rs e not, and t h e conf id ence
interv al ref l ects t h at . Th e 95% conf id ence interv al f or a s amp l e com-
p ris ed of t h i r t y nod es is between 40% and 78% - a 38% s wing. To
obt ai n a 99% conf id ence interv al f rom t h e t h i rt y s amp l e nod es , we
wou l d h av e t o ext end t h e range f rom 34% t o 82%. Th e l es s on in t h i s is
t h at p rop ort i ons s h ou l d always be t es t ed t o make s u re t h e conf id ence
interv al s are accep tabl e f or t h e p u rp os e f or wh ich t h e meas u rement
is being u s ed .
Confidence Intervals
and Intuition
Correl at i on Me as ur e s
Th ere are s ev eral d if f erent ways t o tes t wh et h er two v ariabl es mov e
t oget h er - t h at is , wh et h er ch anges in one are rel at ed t o ch anges
in t h e ot h er. Th i s ch ap t er wil l l ook at two of t h em - correl ation
coef f icients and mu l tip l e regres s ion.
2
C orrel at i on coef f icients may be cal cu l ated bet ween any two d at a
s eries of t h e s ame l ength . A correl ation coef f icient of 0.8 means 80%
of t h e v ariation in one v ariabl e may be exp l ained by v ari at i ons in
t h e ot h er v ariabl e. I f t h e correl ation coef f icient is p os itiv e, it means
increas ing v al u es of t h e f irs t v ariabl e are rel ated t o increas ing v al u es
of t h e s econd v ariabl e. I f negativ e, it means t h e rev ers e.
A correl ation coef f icient comes wi t h a rel at ed s t at i s t i c, cal l ed t h e
studen t's t-test. General l y, a t-tes t of two or bet t er means t h at t h e
two v ariabl es are rel ated at t h e 95% conf id ence l ev el or bet t er .
A s s u me a p roject inv ol v es many ru ns wh ere t h e mu t at i on r at e is
ch anged f rom 5% t o 20% t o 50%. Th e ru ns are f inis h ed . Did ru ns
u s ing h igh er mu t at i on rat es p rod u ce bet t er or wors e p erf orming in-
d iv id u al s ? C al cu l at i ng t h e correl ation coef f icient and t-tes t between
mu t at i on rat e and p erf ormance wou l d be a good way t o s t ar t an-
s wering t h i s qu es tion. I f t h e v al u e of t h e t -t es t exceed ed 2.0, t h en t h e
2
C orrel ation anal ys is d oes not tes t wh eth er ch anges in v ariabl e 1 cause
ch anges in v ariabl e 2, onl y wh eth er th e ch anges h ap p en togeth er. S tatis tics
d oes n ot es tabl is h cau s ation.
Correlation Coefficient
Student's t-Test
Use of Correlation
Analysis in GP
m j j j 8 Analysis Improving Genetic Programming with Statistics
correl ation between mu t at i on and p erf ormance is s ignif icant at t h e
95% l ev el .
Multiple Regression Mu l tip l e regres s ion is a more s op h i s t i cat ed t ech ni qu e t h an s imp l e
correl ation coef f icients . I t can u ncov er rel ations h ip s t h at t h e s imp l er
t ech ni qu e mis s es . Th at is becau s e mu l tip l e regres s ion is abl e t o mea-
s u re t h e ef f ects of s ev eral v ariabl es s imu l taneou s l y on anot h er v aria-
bl e. Like correl ation anal ys is , mu l tip l e regres s ion is l inear and yiel d s
bot h a coef f icient and a t s core f or each i nd ep end ent v ariabl e.
I f t h e res earch ers in t h e mu t at i on/ p er f or mance s t u d y ref erred
t o abov e h ad not f ou nd a s t at i s t i cal l y s ignif icant rel at i ons h i p be-
tween mu t at i on and p erf ormance u s ing t h e correl ation coef f icient,
t h ey migh t h av e t o d eal with one ad d i t i onal f act. I n th eir ru ns , t h ey
d id not j u s t v ary t h e mu t at i on rat e, t h ey al s o v aried t h e p ars i mony
r at e. Th e ef f ect of ch anges in t h e p ars i mony r at e cou l d wel l h av e
obs cu red t h e ef f ect of t h e ch anges in t h e mu t at i on rat e. Mu l tip l e re-
gres s ion migh t h av e h el p ed in t h i s cas e becau s e it wou l d h av e al l owed
t o h ol d t h e p ars i mony r at e cons t ant and tes t f or j u s t t h e ef f ect of t h e
mu t at i on rat e.
Tes t i ng Pr opos i t i ons
F s cores are f requ entl y u s ef u l t o d et ermi ne wh et h er a p rop os i t i on
is not f al s e. A s s u me a p roject inv ol v ing meas u rement s of t h e v al u e
of bes t ind iv id u al h i t s in t h i rt y s ep arat e GP ru ns . Th at t h i r t y- r u n
s amp l e wil l h av e a mean (cal l it 75%) and t h e ind iv id u al s amp l es wil l
v ary arou nd t h at mean (s ome ru ns wil l h av e h i t s of 78% and ot h ers
72%).
F- Test A n F- t es t anal yzes t h e mean and t h e v ariance of t h e s amp l e and
t es t s t h e p rop os ition t h at t h e mean of t h e t h i rt y s amp l es is not zero.
Th e F- t es t is exp res s ed in p robabil ities . Th eref ore an F-teat of 0.05
wou l d mean t h e p robabi l i t y t h at t h e mean of t h e t h i rt y s amp l es is
zero is onl y 5%. (S ee [A nd re et al ., 1996a] f or a s u cces s f u l ap p l i cat i on
of t h e F- t es t t o es tabl is h t h at a tiny bu t v ery p ers i s t ent d if f erence in
res u l ts was s tatis tical l y s ignif icant.)
More comp l ex F- t es t s are av ail abl e. For examp l e, one can t es t
t h e p rop os i t i on t h at t h e means of two d if f erent s amp l es are d if f er-
ent by more t h an a s p ecif ied interv al . Th i s is a v ery u s ef u l meas u re
in es tabl is h ing t h e rel ativ e p erf ormance of d if f erent mach i ne l earn-
ing s ys t ems (bench marki ng). I n a typ ical bench marki ng s tu d y, each
s ys t em p rod u ces a v ariety of ru ns and res u l ts on t h e s ame d at a.
A recent s t u d y ran a GP s ys t em and a neu ral network on t h e s ame
tes t d at a. Th e GP s ys t em d id a l ittl e bet t er t h an t h e neu ral network
acros s t h e board bu t t h e d if f erence was not l arge. For examp l e, f or
t h e bes t 10% of ru ns on one d at a s et, GP av eraged 72% correct and
8.2 Offline Preprocessing and Analysis
t h e network av eraged 68% [Francone et al ., 1996]. I s t h at d if f erence
s t at i s t i cal l y s ignif icant? Fort u nat el y, t h i s was a big s t u d y and t h er e
were a l ot of ru ns . Th e F- t es t f or a h yp oth es ized d if f erence bet ween
two means as s u mi ng u nequ al v ariances is v ery u s ef u l in t h i s s i t u at i on.
I t gav e a 95% conf id ence l ev el t h at t h e d if f erence in means cited abov e
was at l eas t a 1% d if f erence.
A l l of t h e abov e t es t s can p rov id e excel l ent f eed back abou t t h e Caveat
weigh t t h at s h ou l d be giv en t o exp eri ment al res u l ts . Nev erth el es s ,
s t at i s t i cs is an anal yt i c s cience. A nu mber of as s u mp t i ons h ad t o be
mad e t o d eriv e t -t es t s , F- t es t s , and t h e l ike. For examp l e, mos t s ta-
tis tical meas u res as s u me t h at t h e d i s t ri bu t i on of t h e s amp l e on wh ich
t h e t es t is being p erf ormed is ap p roxi mat el y nor mal (s ee C h ap t er 3).
I n p ract i ce, t h e t es t s work p r et t y wel l ev en if t h e d i s t ri bu t i on is f airl y
d i s t ant f rom a Gau s s i an. Bu t it is al ways a good id ea t o t ake a l ook
at a h i s t ogram of t h e d at a one is anal yzing t o make s u re it d oes not
gros s l y v iol ate t h i s as s u mp t i on of normal ity. I f it d oes , t h e v al u e of
any of t h e t es t s d es cribed abov e is d u bi ou s .
8.2 Offline Preprocessing and Analysis
Bef ore a GP ru n, t h ere is onl y d at a. I t is u s u al l y comp ris ed of d if -
f erent ins tances of d if f erent d at a s eries . Th e t as k of t h e res earch er is
twof ol d :
1. To s el ect wh ich d at a s eries and d at a ins tances s h ou l d be f ed t o
t h e GP s ys t em as i np u t ( s ) ;
3
and
2. To d et ermi ne wh ich , if any, t rans f ormat i ons s h ou l d be ap p l ied
t o t h e d at a bef ore it is f ed t o t h e GP s ys t em.
Prep roces s ing and anal ys is of d at a before a ru n p l ays a cru cial rol e
in t h e mach i ne l earning l i t erat u re, p art i cu l arl y t h e neu ral network
l i t erat u re.
Prep roces s ing and anal ys is comes in t h ree f orms :
1. Prep roces s ing t o meet t h e i np u t rep res ent at i on cons t rai nt s of
t h e mach i ne l earning s ys tem;
2. Prep roces s i ng t o ext ract u s ef u l inf ormation f rom t h e d at a t o
enabl e t h e mach i ne l earning s ys t em t o l earn; and
3. A nal yzing t h e d at a t o s el ect a t rai ni ng s et.
3
Th is is a l argel y u nexp l ored d omain in GP. Th e l ittl e res earch th at
exis ts on s el ecting inp u ts ind icates th at GP d oes not d o wel l wh en f ed a
l ot of irrel ev ant inp u ts [Koza, 1992d l .
8 Analysis Improving Genetic Programming with Statistics
Th e next t h ree s u bs ections d is cu s s t h e i nt egrat i on of s u ch tech -
niqu es into GP.
8.2.1 Feature Representation Constraints
Mu ch of t h e p rep roces s ing of d at a f or neu ral networks or ot h er ma-
ch ine l earning met h od s is requ ired by t h e cons t rai nt s on f eatu re (in-
p u t ) rep res ent at i on in th os e met h od s (s ee C h ap t er 1). For examp l e,
mos t neu ral networks can accep t i np u t s onl y in t h e range of 1 t o 1.
Bool ean s ys t ems accep t i np u t s of onl y 0 or 1, t r u e or f a l s e . S o it is
u s u al l y neces s ary t o center and normal ize neu ral network i np u t s and
t o t rans f orm i np u t s f or a Bool ean s ys t em t o be eith er 0 or 1.
By way of cont ras t , GP h as great f reed om of rep res ent at i on of
t h e f eatu res in t h e l earning d omai n. A s a res u l t, it can accep t i np u t s
in abou t any f orm of d at a t h at can be h and l ed by t h e comp u t er
l angu age in wh ich t h e GP s ys t em is wri t t en and , of cou rs e, ov er a
v ery wid e range. I t h as been s u gges ted t h at it may be u s ef u l t o
h av e t h e d if f erent i np u t s cov er rou gh l y t h e s ame ranges and t h at
t h e cons t ant s al l owed in t h e GP s ys t em cov er t h at range al s o. Th e
au t h ors are not aware of any exp eri ment al p roof of t h i s concep t bu t it
s eems a good s u gges tion t o f ol l ow. Howev er, u nl ike in mos t mach i ne
l earning s ys t ems , th is is not a maj or is s u e in GP.
8.2.2 Feature Extraction
O ne ch al l enging goal among GP res earch ers is t o be abl e t o s ol v e
p robl ems u s ing no p rior knowl ed ge of t h e l earning d omai n. Fre-
qu entl y, h owev er, we can obt ai n p rior knowl ed ge of t h e d omai n by
u s ing wel l -es tabl is h ed s t at i s t i cal tech niqu es . Th es e tech niqu es may
ext ract u s ef u l t yp es of inf ormation f rom t h e raw d at a or f il ter ou t
nois e.
S ome of th es e tech niqu es are s imp l e. For examp l e, one mi gh t l ook
at a h i s t ogram of an i np u t d at a s eries and d et ermi ne t h at ou t l yi ng
p oi nt s in t h e d i s t ri bu t i on s h ou l d be t r u ncat ed back t o t h ree s t and ar d
d ev i at i ons f rom t h e mean of t h e s eries . O t h er tech niqu es are mu ch
more comp l ex bu t nev erth el es s v ery u s ef u l . Th i s ch ap t er wil l t ou ch
on onl y two tech niqu es : p rincip al comp onent s anal ys is and ext ract i on
of p eriod ic inf ormation in t i me s eries d at a.
Pri nci pal Co mpo ne nt s Anal ys i s
Real -worl d p robl ems f requ entl y h av e i np u t s t h at contain a l arge qu an-
t i t y of r ed u nd ant inf ormation. O ne s eries of i np u t comp onent s mi gh t
f requ entl y be correl ated wi t h anot h er s eries of i np u t comp onent s t o
a h igh d egree. I f bot h s eries are u s ed as i np u t s t o a mach i ne l earning
8.2 Offline Preprocessing and Analysis
s ys t em, t h ey cont ai n r ed u nd ant inf ormation. Th er e are t wo reas ons
wh y t h i s is rel ev ant:
1. GP s t ar t s in a h ol e. I t h as t o l earn h ow t o u nd o t h e red u nd ancy
and t o f ind t h e u s ef u l inf ormation.
2. Red u nd ancy of t h i s kind creat es u nneces s aril y l arge i np u t s ets .
O ne way t o at t ack t h i s p robl em wou l d be t o cal cu l ate t h e corre-
l ation coef f icient f or each p air of p ot ent i al i np u t v ariabl es . I n f act,
t h i s is a good id ea bef ore a GP r u n in any ev ent. Bu t s u p p os e t h e
correl ation bet ween two of t h e v ariabl es is h igh . Do we t h row one
ou t ? Do we keep t h em bot h ?
4
Pri nci p al comp onent s anal ys is ( PC A ) ext ract s t h e u s ef u l v aria-
tion f rom s ev eral p art i al l y correl at ed d at a s eries and cond ens es t h at
inf ormation into f ewer bu t comp l etel y u ncorrel at ed d at a s eries . Th e
s eries ext ract ed by PC A are cal l ed t h e compon en ts or prin cipal com-
pon en ts. E ach of t h e p rincip al comp onent s is nu mbered (t h e f irs t
p rincip al comp onent , t h e s econd ... and s o f orth ). Th e act u al tech -
niqu e f or cal cu l at i ng p ri nci p al comp onent s is beyond t h e s cop e of t h i s
ch ap t er. Wh at f ol l ows is a v is u al met ap h or f or wh at PC A is d oing
wh en it ext ract s comp onent s .
PC A cal cu l ates t h e f irs t p rincip al comp onent by r ot at i ng an axis
t h r ou gh t h e n-d imens ional s p ace d ef ined by t h e i np u t d at a s eries .
PC A ch oos es t h i s axis s o t h at it accou nt s f or t h e maxi mu m amou nt
of v ari at i on in t h e exis ting d at a s et. Th e f irs t p rincip al comp onent is
t h en t h e p rojection of each d at a el ement onto t h at axis .
PC A cal cu l ates t h e ad d i t i onal p rincip al comp onent s in a s imil ar
manner excep t t h at t h e v ariation exp l ained by p rev iou s comp onent s
is not comp ens at ed f or in p os itioning s u bs equ ent axes . I t s h ou l d
be ap p ar ent t h at each new p rincip al comp onent mu s t be meas u red
on an axis t h at is ort h ogonal t o t h e axes of t h e p rev iou s p rincip al
comp onent (s ). O ne v ery nice f eatu re of PC A is t h at it red u ces t h e
nu mber of i np u t s t o t h e GP s ys t em s u bs t ant i al l y wh il e keep ing mos t
of t h e inf ormation cont ai ned in t h e original d at a s eries . I n f act, it is
not normal l y neces s ary t o ext ract more t h an two or t h ree comp onent s
t o get t h e v as t bu l k of t h e v ariance. Th i s is t r u e ev en wh en t h ere are
many d at a s eries .
Howev er, PC A is not an au t omat i c p roces s nor is it a p anacea
f or al l i np u t p robl ems , f or at l eas t t h ree reas ons :
A ctu al l y, wh ere th ere are onl y two h igh l y correl ated v ariabl es , it of-
ten h el p s to u s e th eir s u m and th eir d if f erence as inp u ts rath er th an th e
v ariabl es th ems el v es . I f th ere are more th an two, it is neces s ary to u s e
p rincip al comp onents anal ys is .
E3I
8 Analysis Improvi ng Genetic Programmi ng wi t h Statistics
1. PC A inv ol v es ju d gment cal l s abou t h ow many comp onents to
u s e.
2. Weigh ting inp u ts to th e PC A s ys tem to emp h as ize "imp ortant"
v ariance and to d eemp h as ize "u nimp ortant" v ariance can h el p
th e p erf ormance of th e PC A tool . Bu t as s igning imp ortance
to v ariance is a tas k GP its el f ou gh t to be d oing. For GP
p u rp os es , th e manu al as s ignment of weigh ts s eems rath er self-
d ef eating u nl es s one h as s p ecif ic d omain knowl ed ge to ju s tif y
th e d ecis ion.
3. Wh en, f or ins tance, twel v e comp onents are red u ced to onl y
th ree comp onents , some inf ormation wil l be l os t. I t cou l d be
th e inf ormation th at th e GP s ys tem need ed .
Notwith s tand ing th es e d rawbacks , PC A can be an ef f ectiv e tool and ,
u s ed p rop erl y, h el p s f ar more of ten th an it h u rts .
Extraction of Periodic Information in Ti me Series Dat a
E ngineers and s tatis ticians h av e s p ent d ecad es d ev el op ing tech niqu es
to anal yze time s eries . S ome of th at work h as mad e its way into GP
[O akl ey, 1994a]. Th e p u rp os e of th is s ection is to giv e th e broad es t
ov erv iew of th e typ es of work th at h av e been d one in th es e areas to
s p u r f u rth er res earch by th e interes ted read er. >
;
' '''
Figure 8. 1
A time series shown in 3 5
the time domain ,
To begin with , th ere are s imp l e tech niqu es to extract d if f erent
typ es of inf ormation f rom time s eries d ata s u ch as s imp l e or exp o-
nential mov ing av erages (S MA s or E MA s ). For examp l e, Figu re 8.1 is
8. 2 Offl ine Pr epr ocessing and Anal ysis
a time s eries p l otted ov er ten years . To th e eye, it h as s ome p eriod ic
comp onents bu t th ere ap p ears to be a l ot of nois e.
Figu re 8.2 is th e s ame time s eries as in Figu re 8.1 excep t th at
two d if f erent s imp l e mov ing av erages h av e been ap p l ied to th e s eries .
Note th at th e s imp l e mov ing av erages s erv e as a s ort of l ow p as s f il ter,
al l owing onl y l ow f requ encies th rou gh . Th is tend s to f il ter ou t wh at
migh t be nois e. I n many ins tances , S MA -typ e p rep roces s ing greatl y
as s is ts mach ine l earning s ys tems becau s e th ey d o not h av e to l earn
h ow to f il ter ou t th e nois e.
5
Untransformed Data
-Six Month SMA
-One Year SMA
Th is brief treatment of S MA s is f ar too s imp l e. Th e p rice of th e
l ow p as s f il ter is th at th e s mooth ed d ata s eries l ags beh ind ch anges
in th e real worl d . Th e greater th e s mooth ing, th e greater th e l ag.
Fu rth er, if th e actu al d ata exh ibits genu ine p eriod icity, th is means
th at th e s mooth ed d ata may be ou t of p h as e with th e actu al d ata
u nl es s exactl y th e righ t wind ow was ch os en f or th e S MA . Th ere is a
rich bod y of l iteratu re in th e trad ing tech nical anal ys is worl d d eal ing
with th is is s u e and , in p articu l ar, h ow to id entif y th e d ominant cycl e
and h ow to ad ju s t th e f il ters s o th at th e f il tered d ata end u p in p h as e
with th e real -worl d d ata [E h l ers , 1992].
Th ere are many oth er tech niqu es to extract p eriod ic comp onents
or oth erwis e p rep roces s time s eries d ata s u ch as d etrend ing and cen-
S h ou l d th ere be concern th at th e S MA is f il tering ou t v al u abl e h igh
f requ ency inf ormation, th e res id u al s may be cal cu l ated (th at is , th e d iffer-
ence between th e original s eries and th e S MA ). Th os e res id u al s may be fed
to th e GP s ys tem as a s ep arate d ata s ou rce.
Figure 8.2
The time series from 8.1
with a simple moving
average
Other Preprocessing
Techniques
WSHM 8 Analysis Improving Genetic Programmi ng wi t h Statistics
tering, d if f erencing, d igital f il tering, t h e maxi mu m ent rop y s p ect r u m
t ech ni qu e, qu ad r at u r e mirror f il ters , and wav el ets .
6
Let u s l ook at d is crete Fou rier t rans f orms and t h e p ower s p ect ru m
as an examp l e of t h e many p rep roces s ing tech niqu es t h at are av ail abl e
f or real -worl d t i me s eries d at a.
The Discrete Fourier Fi gu re 8.1 is a t i me s eries p l ot t ed in t h e t i me d omai n. Th i s means
Tran sform t h at t h e s eries in Fi gu re 8.1 is rep res ented as a f u nction of t i me and
v al u e. I t is p os s ibl e t o trans f orm t h e s eries into ot h er d omai ns . A
p op u l ar t rans f orm is t h e d is crete Fou rier trans f orm. O nce t h e Fou rier
t rans f orm is p erf ormed , t h e real and i magi nary p ar t s of t h e t rans f orm
are map p ed t o a p ower s p ect ru m. Th i s conv erts t h e s eries f rom t h e
t i me d omai n t o a f requ ency/p ower d omai n.
How is t h i s u s ef u l ? I f Fi gu re 8.1 were a s ou nd wav e, f eed ing t h e
res u l ts of t h e d is crete Fou rier t rans f orm t o a GP s ys t em mi gh t h el p
t h e GP s ys t em t o bet t er ext ract u s ef u l inf ormation f rom t h e wav e. I n
ef f ect, t h e GP s ys t em wou l d not h av e t o go t o t h e t rou bl e of l earning
1 h ow t o ext ract t h e p eriod ic inf ormation. A mu ch s imp l er s t at i s t i cal
d ev ice wou l d be d oing t h at f or t h e GP s ys tem.
8. 2. 3 Analysis of Input Da t a
S el ecting a t rai ni ng s et of ten p res ents two p robl ems :
1. How t o ch oos e among i np u t s eries
2. How t o ch oos e t rai ni ng ins tances
Choos i ng a mo ng I nput Seri es
Th e GP res earch er is f requ entl y f aced wi t h many d at a s eries bu t h as
no id ea (oth er t h an i nt u i t i on) wh ich of t h e d at a s eries are rel ev ant.
Th i s p robl em aris es f requ entl y in real -worl d p robl ems - es p ecial l y
in s ou nd and image p roces s ing p robl ems , t i me s eries p robl ems , and
d at a mi ni ng p robl ems . How t o ch oos e i np u t s eries is one of t h e great
u nexp l ored areas in GP. Wh at l ittl e res earch t h ere is s u gges ts t h at ,
wh en GP is f ed t oo many irrel ev ant i np u t s , its p erf ormance is s ev erel y
comp romis ed [Koza, 1992d ].
Some Suggestion s I n t h e l ong t erm, a met a-l earni ng ap p roach is p robabl y t h e bes t
s ol u tion. Bu t f or mos t GP s ys t ems , s eriou s met a-l earni ng wil l h av e
t o wait f or f as ter comp u t ers . Here are s ome s u gges tions u ntil t h en:
Ru n correl ation coef f icients between each p ot ent i al i np u t and
t h e ou t p u t . Th i s migh t h el p narrow wh at i np u t s t o u s e. O b-
v iou s l y, i np u t s wi t h h igh er correl ations s h ou l d be u s ed , bu t it
6
A 11 of th es e s u bjects are treated wel l and in d etail in [Mas ters , 1995b].
8.2 Offline Preprocessing and Analysis
would be u nwis e t o s t op t h ere. Th e correl ation coef f icient wil l
f requ entl y mis s many of t h e i mp or t ant v ariabl es .
U Ru n correl ation coef f icients between each p ot ent i al i np u t . For
t h os e t h at are correl ated , grou p t h em t oget h er, d o a p rincip al
comp onent s anal ys is , as s u gges ted abov e, and u s e t h e res u l ting
comp onent s as i np u t s .
Try d if f erent ru ns wi t h d if f erent combi nat i ons of v ariabl es . Keep
d at a on wh ich ru ns d o t h e bes t. S el ect t h e v ariabl es t h at are
mos t of ten as s ociated wi t h good ru ns . Do more ru ns wi t h t h e
p os s ibl y good v ariabl es . Keep rep eat i ng t h i s u ntil t h e s ys t em
p rod u ces accep t abl e res u l ts . I n ef f ect, t h i s is p erf orming met a-
l earning manu al l y wi t h res p ect t o v ariabl e s el ection.
7
Choos i ng Trai ni ng I ns t anc e s
Dat a anal ys is may al s o be of u s e in s el ecting a t rai ni ng s et wh en t h ere
is an abu nd ance of d at a. Th i s is a d if f erent issue than ch oos ing among
d at a s eries . Th i s is s u e as s u mes t h at t h e d at a s eries h av e been ch os en.
Now t h ere are n examp l es of t h e t rai ni ng d omai n u s ing th os e d at a
s eries . Wh i ch of t h e examp l es wil l be u s ed t o t r ai n t h e GP s ys t em?
Th e read er wil l , of cou rs e, recognize t h i s as anot h er i ncarnat i on of
t h e p robl em of get t i ng a rep res ent at i v e s amp l e f rom a p op u l at i on.
I n d at a mining t h e GP s ys t em combs t h rou gh a l arge, f requ entl y Data Min in g
mai nf rame or s erv er d at abas e, and s earch es f or p at t er ns in t h e d at a.
I ncreas ingl y, mach i ne l earning ap p l ications , incl u d ing GP, are being
u s ed f or d at a mining. Th e i mp or t ant ch aract eri s t i c h ere of d at a min-
ing is t h at t h ere are u s u al l y many more t rai ni ng ins tances av ail abl e
t h an a GP s ys t em cou l d p os s ibl y d iges t. Large comp anies of ten h av e
mil l ions or more record s of d at a. Th e p robl em is , h ow t o s el ect t h e
p art i cu l ar t rai ni ng ins tances t o make u p t h e d at a s et, giv en a gros s
ov erabu nd ance of d at a?
O bv iou s l y, t h ere wil l be p robl em-s p ecif ic s el ection is s u es . Bu t
once t h e p robl em-s p ecif ic criteria h av e been f u l f il l ed , it is s til l v ery
7
Th is s u gges tion il l u s trates th e imp ortance of cal cu l ating s tatis tical s ig-
nif icance l ev el s . I f inp u t v ariabl e x ap p ears in two ru ns th at d o wel l , th at is
not s o imp res s iv e. I f it ap p ears in 800 ru ns th at d o wel l , it is . S omewh ere
in between 2 and 800 is a nu mber of ru ns th at wil l giv e you 95% conf id ence
th at h av ing v ariabl e i i n a ru n is rel ated to h av ing a good ou tp u t on th e
ru n. Knowing wh at th at nu mber of ru ns is can s av e you f rom ch as ing a
rel ations h ip th at d oes not exis t (if you d raw concl u s ions bas ed on too f ew
ru ns ). I t can al s o s av e you mu ch cal cu l ation time conf irming a rel ations h ip
f or wh ich you al read y h av e enou gh ev id ence.
BW
8 Analysis Improving Genetic Programmi ng wi t h Statistics
i mp or t ant t h at t h e t rai ni ng s et be rep res ent at i v e of t h e ov eral l d at a
s et. Th ere are s ev eral p os s ibl e ap p roach es :
S el ect a r and om s amp l e of t rai ni ng ins tances f rom t h e mil l ion-
p l u s d at abas e. Bu t t h at rais es t h e p robl em we h av e s een bef ore,
v ariance cau s ed by s amp l ing error. A r and om s amp l e can be
qu i t e u nrep res ent at i v e of t h e ov eral l t rai ni ng s et. Th i s ch ap t er
h as been f il l ed wi t h ins tances wh ere s t at i s t i ci ans wou l d exp ect
v ery s u bs t ant i al v ariation among d if f erent r and om s amp l es f rom
t h e s ame p op u l at i on.
Large d at a s ets f or d at a mi ni ng u s u al l y h av e many i np u t v ari-
abl es in ad d i t i on t o many record s . I t wou l d t ake s ome t i me,
bu t t h e mean and v ariance of each of th os e record s cou l d be
cal cu l at ed . From t h at , it s h ou l d be p os s ibl e t o d ef ine an ac-
cep t abl e l ev el of v ariance f or each s u ch v ariabl e. E i t h er by cal -
cu l at i on or by rep eat ed s amp l i ng and meas u rement of d if f erent
s ize s amp l es , one cou l d cal cu l ate t h e ap p roxi mat e s amp l e s ize
t h at p rod u ces a s u f f icientl y rep res ent at i v e t rai ni ng s et. I f t h e
s amp l e s ize ch os en is not s o l arge t h at GP t rai ni ng wou l d be
u nd u l y s l ow, t h i s is a workabl e op tion.
O ne cou l d al s o l ook at t h e d i s t ri bu t i ons of t h e i np u t v ariabl es
in t h e ov eral l d at a s et and make s u re t h at t h e "rand om s amp l e"
t h at is p icked mat ch es th os e d i s t ri bu t i ons cl os el y.
Th e abov e ap p roach is workabl e bu t u ns atis f ying. Per h ap s t h i s
is a s i t u at i on f or s t och as t i c s amp l i ng (s ee C h ap t er 10). I n t h at
met h od , t h e res earch er nev er d oes p ick a t rai ni ng s et. Rat h er ,
t h e GP s ys t em is p rogrammed t o p ick a new s mal l t rai ni ng s et
regu l arl y, t rai n on it f or a brief p eri od , and t h en p ick anot h er
new, s mal l t rai ni ng s et.
Th e abov e are j u s t a f ew of t h e met h od s in wh ich s t at i s t i cal
anal ys is and d at a p rep roces s ing may be u s ed bef ore a GP r u n ev en
s t art s . Th e next s ections wil l s h ow wh at we can d o wi t h t h e res u l ts of
a GP ru n and d emons t r at e h ow t o meas u re wh at is going on durin g
a GP ru n.
8.3 Offline Postprocessing
8.3.1 Measurement of Processing Effort
Koza h as d es igned a met h od f or GP p erf ormance meas u ri ng wi t h
res p ect t o t h e p roces s ing ef f ort need ed f or f ind ing an ind iv id u al -
8.3 Offline Postprocessing
BJH
with a certain p robabil ity - th at s atis f ies th e s u cces s p red icate of a
giv en p robl em [Koza, 1992d ]. Th e s u cces s p red icate s ometimes is a
p art of th e termination criterion of a GP ru n. I t is a cond ition th at
mu s t be met by an ind iv id u al in ord er to be accep tabl e as a s ol u tion.
Th e p roces s ing ef f ort is id entif ied with th e nu mber of ind iv id u al s
th at h av e to be p roces s ed in ord er to f ind - with a certain p robabil -
ity - a s ol u tion. Note th at th is meas u re as s u mes a cons tant p roces s -
ing amou nt f or each ind iv id u al , wh ich is a s imp l if ication of real ity. I n
general , d if f erent ind iv id u al s wil l h av e d if f erent s tru ctu res and th is
imp l ies d if f erent p roces s ing ef f orts . For examp l e, an ind iv id u al h av -
ing a l oop may requ ire a s ignif icantl y h igh er p roces s ing ef f ort f or its
ev al u ation th an an ind iv id u al th at d oes not u s e l oop s .
Becau s e of th e s imp l if ication, we can concentrate on th e p op u l a-
tion s ize M and th e nu mber of generations ev ol v ed in a certain ru n
as th e two imp ortant p arameters .
Koza's meth od s tarts with d etermining th e ins tantaneou s p rob- In stan tan eous
abil ity I(M, i) th at a certain ru n with M ind iv id u al s generates a Probability
s ol u tion in generation z. O ne can obtain th e ins tantaneou s p roba-
bil ity f or a certain p robl em by p erf orming a nu mber of ind ep end ent
ru ns with each of th es e ru ns u s ing th e s ame p arameters M and i.
I f I{M, i) h as been d etermined f or al l i between th e initial gener- Success Probability
ation 0 and a certain f inal generation, th e s u cces s p robabil ity P(M, i)
f or th e generations u p to i can be comp u ted . Th at is , p = P(M, i)
is a cu mu l ativ e meas u re of s u cces s giv ing th e p robabil ity th at one
obtains a s ol u tion f or th e giv en p robl em if one p erf orms a ru n ov er i
generations .
With th is f u nction meas u red , th e f ol l owing qu es tion can be an-
s wered : giv en a certain p op u l ation s ize M and a certain generation
nu mber i u p to wh ich we want to h av e a ru n p erf orm at mos t, wh at
is th e p robabil ity of f ind ing a s ol u tion, at l eas t once, if we d o R
ind ep end ent ru ns with each ru n h av ing th e p arameters M and il
To ans wer th is qu es tion, cons id er th at th e p robabil ity of n ot fin d-
in g a s ol u tion in th e f irs t ru n is 1 P(M,i). S ince th e ru ns are
ind ep end ent of each oth er, th e p robabil ity of again not f ind ing th e
s ol u tion in th e s econd ru n is (1 P(M, i))
2
. I n general , th e p robabil -
ity of not f ind ing th e s ol u tion in ru n Ris(l- P(M,i))
R
. Th u s , th e
p robabil ity of fin din g a s ol u tion by generation i, u s ing R ru ns , is :
z = l-(l-P{M,i))
R
(8.1)
O u r qu es tion was : wh at is th e p robabil ity of f ind ing a s ol u tion, at
l eas t once, if we d o R ru ns ? We can now tu rn th is qu es tion arou nd
and as k: h ow many ru ns d o we need to s ol v e a p robl em with a certain
8 Analysis Improving Genetic Programmi ng wi t h Statistics
p robabi l i t y z? S ol v ing t h e abov e equ at i on f or R giv es
_ l og(l - z)
l o g ( l - P ( M, ) ) ^
j
R mu s t be rou nd ed u p t o t h e next h igh er integer t o yiel d t h e ans wer.
I f mu t at i on is one of t h e genetic op erat ors , t h en t h e s u cces s p rob-
abil ity P(M, i) ris es t h e more generat i ons a ru n p erf orms . For giv en
v al u es of M and z, t h i s means t h at t h e ev ol u tion of more generat i ons
p er ru n requ ires f ewer ru ns t o be d one in ord er t o f ind a s ol u tion
wi t h p robabi l i t y z, wh il e, on t h e ot h er h and , t h e ev ol u tion of f ewer
generat i ons p er ru n requ ires more ru ns t o be d one.
Wh i ch generation nu mber requ ires a cert ai n nu mber of ru ns s u ch
t h at t h e ov eral l nu mber of p roces s ed ind iv id u al s - t h e p roces s ing ef-
f ort - is mi ni mal ? Th i s qu es tion can onl y be ans wered in a p robl em-
s p ecif ic way s ince t h e i ns t ant aneou s p robabi l i t y is emp irical l y ob-
t ai ned by d oing ru ns on t h e p robl em at h and .
8.3.2 Trait Mining
Us u al l y, a p r ogr am ind u ced by genetic p r ogr ammi ng is not at al l a
p iece of cod e t h at s of tware engineers wou l d r at e as h igh qu al i t y wi t h
res p ect t o u nd ers t and abi l i t y by a h u man. I t of ten is v ery monol ith ic,
contains p robl em-rel ev ant bu t r ed u nd ant cod e and - ev en wors e - a
l ot of cod e irrel ev ant t o t h e p robl em at h and . Tackett ap p roach es
t h i s p robl em wi t h a met h od h e cal l s t rai t mi ni ng [Tackett, 1995].
Red u nd ant and irrel ev ant cod e bl oat s t h e p rogram and of ten v ery
ef f ectiv el y d is gu is es t h e s al ient exp res s ions - t h e exp res s ions t h at ac-
t u al l y h el p in s ol v ing t h e p robl em. Trai t mi ni ng h el p s t o id entif y
th os e exp res s ions .
Knowl ed ge emerges s tep wis e d u ri ng a genetic p r ogr ammi ng ru n.
I nitial l y, t h e p op u l at i on-i nh erent knowl ed ge abou t t h e p robl em is
v ery s mal l , becau s e p rograms are r and om s t ru ct u res . S oon, at l eas t in
a s u cces s f u l genetic p rogrammi ng ru n, t h e beh av ior of more and more
p rograms begins t o ref l ect t h e p robl em, wh ich means t h e p op u l at i on
grad u al l y acqu ires more knowl ed ge abou t t h e p robl em.
Howev er, d u e t o t h ei r s ize and of ten tricky and cou nt er-i nt u i t i v e
s t ru ct u res , t h e ev ol v ed p rograms mos t l y are h ard f or h u mans t o read
and u nd er s t and . A naiv e ap p roach t o av oid ing t h i s u np l eas ant s it-
u at i on and al l ev iating p r ogr am anal ys is is t o res trict t h e s ize and
comp l exity of t h e p rograms . O n t h e ot h er h and , p rogram s ize and
comp l exity may be need ed f or s ol v ing a p robl em.
Gen e Ban kin g For t h i s reas on, t rai t mi ni ng d oes not imp os e res trictions on t h es e
p r ogr am at t r i bu t es in ord er t o id entif y s al ient exp res s ions . I t r at h er
8.4 Analysis and Measurement of Online Data
BJU
keep s book on al l exp res s ions ev ol v ed s o f ar d u ring a genetic p rogram-
ming ru n. Th is ap p roach h as been cal l ed gene banking. O bv iou s l y,
d u e to th e l arge nu mber of s u ch exp res s ions , gene banking cons u mes a
s ignif icant amou nt of C PU time and memory. Tackett cl aims th at an
integrated h as h ing-bas ed mech anis m keep s th is cons u mp tion with in
accep tabl e l imits .
Final l y, wh en a genetic p rogramming ru n h as end ed , trait mining
al l ows f or th e ev al u ation of exp res s ions with res p ect to h ow s al ient
th ey are.
8.4 Analysis and Measurement of Online Data
8. 4. 1 Onl ine Da t a Analysis
Th e f irs t qu es tion in onl ine d ata anal ys is is : wh y wou l d one want to d o
it? Th e ans wer is twof ol d and s imp l e. Doing s o is (i) f as cinating and
(ii) of ten immens el y u s ef u l . GP ru ns u s u al l y s tart in a rand om s tate
and go th rou gh a p eriod of rap id ch ange d u ring wh ich th e f itnes s
of th e p op u l ation grows . E v entu al l y GP ru ns reach a p oint wh ere
ch ange end s - ev en th ou gh s imu l ated ev ol u tion continu es .
O nl ine tool s monitor th e trans ition f rom rand omnes s to s tabil ity.
Not onl y d o th ey h igh l igh t h ow th e trans ition takes p l ace, th ey al s o
rais e th e p os s ibil ity of being abl e to control GP ru ns th rou gh f eed back
f rom th e onl ine meas u rements .
I n th e next s u bs ections , we wil l f irs t ad d res s meas u rement is s u es
f or onl ine d ata. Th en we wil l d es cribe s ome of th e onl ine d ata tool s
th at are al read y being u s ed . Final l y, we wil l d is cu s s th e u s e of onl ine
meas u rements f or ru n control .
8. 4. 2 Measur ement of Onl ine Da t a
Th is ch ap ter h as al read y ad d res s ed s ome meas u rement is s u es f or on-
l ine meas u rement tool s . Recal l th e earl ier d is cu s s ion of intron ch eck-
ing, a rel ativ el y recent ad d ition to th e ars enal of onl ine anal ys is tool s .
Becau s e intron ch ecking is s o comp u tational l y intens iv e, th e read er
wil l recal l th at a s tatis tical ap p roach to intron ch ecking was recom-
mend ed . A s tatis tical ap p roach to meas u ring any onl ine d ata is p os -
s ibl e. Wh eth er it wou l d be u s ef u l d ep end s on th e trad eof f between
C PU cycl es and th e u ncertainty cau s ed by conf id ence interv al s .
Many of th e typ ical GP onl ine meas u rements ch aracterize th e Gen eration al On lin e
p op u l ation as a wh ol e - av erage f itnes s , p ercentage of th e p op u l ation Measuremen t
th at is comp ris ed of nitrons , and s o f orth . I n th e generational mod el ,
each new generation is a d is tinct new grou p of ind iv id u al s and it is
created al l at once (s ee C h ap ter 5). I t th eref ore makes good s ens e to
KJiB 8 Analysis Improvi ng Genetic Programmi ng wi t h Statistics
meas u re t h e onl ine s t at i s t i cs once p er generation at t h at t i me. Th i s
is t h e typ ical p ract i ce in GP.
Steady-State On lin e S t ead y-s t at e mod el s , on t h e ot h er h and , d o not h av e d is tinct gen-
Measurement erat i ons (s ee C h ap t er 5). S t ead y-s t at e GP mai nt ai ns t h e il l u s ion of
generations by s t op p i ng once ev ery P f itnes s ev al u ations (wh ere P is
t h e p op u l at i on s ize) and meas u ri ng th eir onl ine s t at i s t i cs . Th i s con-
v ention h as p rov ed ef f ectiv e and is u s ed al mos t u niv ers al l y in s t ead y-
s t at e GP s ys t ems . Here, we wil l f ol l ow t h i s conv ention. Th e read er
s h ou l d recal l , h owev er, t h at a generation is no more t h an an agreed
conv ention in s t ead y-s t at e mod el s and any onl ine s t at i s t i c cou l d be
cal cu l ated s o as t o ref l ect t h e real ity of a s t ead y-s t at e s ys t em more
p recis el y.
8
8. 4. 3 Survey of Avail abl e Onl ine Tool s
Fi t ne s s
Und ers t and bl y, f itnes s was t h e earl ies t onl ine meas u rement in wid e-
s p read u s e [Koza, 1992d ]. Th e mos t f requ entl y u s ed f itnes s meas u res
are:
Fi t nes s of t h e p res entl y bes t ind iv id u al ;
A v erage f itnes s of t h e entire p op u l at i on;
Variance of t h e f itnes s of t h e entire p op u l at i on.
Th e l as t two s t at i s t i cs ch aracterize t h e p op u l at i on as a wh ol e
and are s h own in Fi gu re 8.3 f or t h e s ame ru n of a p at t er n recogni-
tion p robl em. Bot h av erage and v ariance f irs t d ecreas e qu ickl y, t h en
increas e again on f ind ing a s imp l e ap p roxi mat i v e s ol u tion wh ich is
not op t i mal . Lat er, av erage f itnes s d ecreas es continu ou s l y, wh ereas
v ariance s tays at a cert ai n l ev el .
Di ve r s i t y
Div ers ity is anot h er meas u re of t h e s t at e of t h e p op u l at i on. Genet i c
d iv ers ity is a neces s ary cond ition f or t h e f as t d et ect i on of a h igh -
f itnes s ind iv id u al and f or a f as t ad ap t at i on of t h e p op u l at i on t o a
8
O ne way to maintain onl ine s tatis tics in a s tead y-s tate s ys tem wou l d be
as E MA s . E ach time a new f itnes s v al u e was cal cu l ated , it wou l d be ad d ed
to th e exis ting E MA f or av erage f itnes s . I f th e il l u s ion of generations is to
be maintained , th e wid th p arameter of th e E MA cou l d be s et s o th at th e
wind ow of th e av erage is ap p roximatel y one generation. More interes ting,
h owev er, wou l d be to s et th e wid th to accommod ate onl y a s h ort wind ow
of d ata. O r p os s ibl y to maintain s ev eral d if f erent wind ows s imu l taneou s l y.
8.4 Analysis and Measurement of Online Dat a
40000 (,
Average Fitness
Variance Figure 8.3
Average fitness and
variance of fitness for a
pattern recognition
problem in AIMGP
1.5e+06
Tournaments
ch anging env ironment. To maintain genetic d iv ers ity d u ring ru ns , it
is u s ef u l to meas u re d iv ers ity and ch anges in d iv ers ity. Th ere are two
ov eral l ap p roach es to meas u ring d iv ers ity:
Genotypic Diversity
Meas u ring th e s tru ctu ral d if f erences between genotyp es ; and
Phenotypi c Diversity
Meas u ring d if f erences in beh av ioral as p ects of th e p h enotyp e
th at are bel iev ed to be rel ated to d iv ers ity.
Genotyp ic d iv ers ity is d iv ers ity among th e actu al s tru ctu res in th e
p op u l ation - th e trees , th e grap h s , or th e l inear genomes . Genotyp ic
d iv ers ity migh t be an onl ine s tatis tic of th e s tate of th e GP p op u l ation
th at is orth ogonal to th e onl ine f itnes s meas u rements . Th is wou l d be
v al u abl e ind eed . To cons tru ct s u ch a meas u re, it wou l d be id eal if no
qu al ity (f itnes s ) inf ormation were contained in th e d iv ers ity meas u res .
Viewed th is way, d iv ers ity s h ou l d be bas ed on a comp aris on of th e
s tru ctu re of th e ind iv id u al s onl y.
O ne good meas u re of d iv ers ity th at f its th is requ irement is to u s e
"ed it d is tances " between p rograms . Th e ed it d is tance of two p ro-
grams cou l d be cal cu l ated as th e nu mber of el ementary s u bs titu tion
op erations neces s ary to trav ers e th e s earch s p ace f rom one p rogram
to anoth er. Th e d ef inition of th e ed it d is tance <5, wh ich goes back
to [Lev ens h tein, 1966], s tates th at 5(g, h) of two genotyp es g, h is th e
minimal nu mber of ap p l ications of giv en el ementary ed it op erations
need ed to trans f orm g into h.
Measuring Genotypic
Diversity
Edit Distance
8 Analysis Improving Genetic Programming with Statistics
Edit Distance for Fixed
Length Genomes
Edit Distance for Tree
Genomes
Edit Distance and
Introns
t>v
O n th e genos p ace of f ixed l ength binary s trings with s ingl e-bit
f l ip p ing as th e onl y ed it op eration, f or ins tance, th e Hamming d is -
tance, th at is th e minimal nu mber of s ingl e-bit f l ip s need ed to trans -
f orm one s tring into anoth er, is a typ e of ed it d is tance of ten u s ed .
A s an examp l e, cons id er th e s trings g 100001 and h = 011111. I n
ord er to trans f orm g into h, we h av e to ap p l y a s ingl e-bit f l ip at l eas t
5 times . Th u s , we h av e S(g, h) = 5.
I n a tree s p ace G, on th e oth er h and , bas ic ed it op erations cou l d
be th e ins ertion and d el etion of nod es . Let th e notation be del{l) and
add(l), wh ere I is a nod e l abel . S ince we h av e a bijection between G
and p ref ix s trings , we can write each tree as a s tring th e ch aracters
of wh ich are l eaf l abel s . For examp l e, cons id er g = +a/bc and h
+ * abc. Th e s equ ence
del(b), del(c), del(/), add(c), del(a), add(*), add(a), add(b)
is a minimal s equ ence l ead ing f rom g to h. Th u s , we h av e 6(g, h) = 8.
I f we imagine th e s p ace of al l genotyp es as a h igh -d imens ional
s p ace [Kel l er and Banzh af , 1994], a genotyp e - th at is a s tru ctu re -
takes exactl y one p os ition. I ntu itiv el y, th ere is h igh genetic d iv ers ity
in a p op u l ation if th e ind iv id u al s rep res ent many d if f erent genotyp es
th at are "equ al l y d is tribu ted " ov er th is entire s p ace.
Th e ed it d is tance ap p roach to d iv ers ity is bas ed on th e as s u mp -
tion th at ed it d is tance actu al l y meas u res d iv ers ity. I t is not cl ear
th at th is is th e cas e. For examp l e, two ind iv id u al s with id entical
working cod e wou l d be f ar ap art in ed it d is tance if one of th e in-
d iv id u al s h ad an intron s tru ctu re comp ris ed of h u nd red s of nod es .
S u ch s tru ctu res are not u ncommon. A l th ou gh th ere wou l d be great
ap p arent d iv ers ity cau s ed by th e introns , in f act th e onl y contribu -
tion of th e introns wou l d be to ch ange th e p robabil ity of cros s ov er
in th e working cod e, th at is , th e effective fitn ess of th e working cod e
[Nord in et al ., 1996]. A rgu abl y, th e d if f erence between th e effective
fitn ess of th e two ind iv id u al s cons titu tes d iv ers ity. Becau s e ef f ectiv e
f itnes s increas es with th e nu mber of introns , th e ed it d is tance wou l d
be rel ated to th e d if f erence in ef f ectiv e f itnes s . I t is es p ecial l y u ncl ear
th at th e ed it d is tance neces s ary to f actor in introns is in any way
equ iv al ent to th e ed it d is tance to get f rom one p iece of working cod e
to anoth er.
Becau s e it h as been s o h ard to d ef ine genotyp ic d iv ers ity and
becau s e meas u ring it is comp u tational l y intens iv e, ed it d is tance as a
meas u re of s tru ctu ral d iv ers ity is not wid el y u s ed .
GP res earch ers h av e al s o meas u red d iv ers ity by meas u ring v ari-
ance in th e p erf ormance of th e p h enotyp e - a good examp l e is mea-
s u rement of v ariance of f itnes s in th e p op u l ation. S u ch meas u re-
ments comp u te s ome as p ect of p h enotyp ic beh av ior. Wh il e s u ch mea-
8.4 Analysis and Measurement of Online Data
s u res are cl earl y not orth ogonal to f itnes s , th ey are comp u tational l y
tractabl e. S ev eral meth od s h av e been u s ed to cal cu l ate p h enotyp ic
d iv ers ity:
Fitness Variance
E xp erimental u s e of f itnes s v ariance s u gges ts th at it meas u res
s ome qu antity of th e s tate of th e p op u l ation th at is d if f erent
f rom f itnes s . C h anges in s u ch meas u res of d iv ers ity with in th e
p op u l ation may p res age major l eap s in th e qu al ity of th e bes t
ind iv id u al s in th e p op u l ation [Ros ea, 1995b] (s ee Figu re 8.3).
Th u s , f itnes s v ariance p rov id es a l ook into th e d iv ers ity is s u e
bu t it is f ar f rom th e id eal of being orth ogonal to th e f itnes s
v ector.
Fitness Histograms
Fitnes s h is tograms p rov id e a more s u btl e l ook into th e d iv ers ity
of th e p op u l ation. Both Ros ea and Koza h av e exp erimented
with th is meas u re. Figu re 8.4 s h ows an examp l e of a f itnes s
h is togram u s ed by [Ros ea, 1995b].
3000-
2 0 0 0 -
Figure 8.4
Fitness histogram. The
number of hits (fulfilled
fitness cases) increases
over the course of a run.
(Reproduced with
permission from
[Rosea, 1995b].)
35 0 Generations
Hits
Entropy
I n accord ance with d ev el op ments in th e GA commu nity, en-
trop ic meas u res of d iv ers ity are al s o p rol if erating. Ros ea p oints
ou t th at d iv ers ity in p op u l ations of p rogram ind iv id u al s can be
W7TM 8 Analysis Improving Genetic Programming with Statistics
rep res ent ed by a meas u re
E(P) =-Y,Pk log Pk (8.3)
k
wh ere pk is t h e p rop ort i on of a p op u l at i on P t h at is in cat egory
or p art i t i on k with ref erence t o a s p ecif ic f eatu re, s u ch as f itnes s .
Regard l es s of wh at meas u rement is u s ed , al l p h enot yp i c f itnes s
meas u res as s u me, imp l icitl y, t h at f itnes s d if f erences d o in f act ref l ect
d if f erences in t h e genotyp es of ind iv id u al s . Wh il e t h i s as s u mp t i on
is intu itiv el y ap p eal i ng, neu t ral v ariants h av ing h u ge d if f erences in
t h ei r s t r u ct u r e of ten beh av e in v irtu al l y t h e s ame manner, and t h u s
ev al u at e t o t h e s ame f itnes s . I t is not cl ear h ow t o h and l e t h i s p rob-
l em.
Wh at is t h e p u rp os e of obs erv ing d iv ers ity, eith er of t h e p h e-
not yp es or t h e genotyp es ? Th e reas on one wou l d want inf orma-
t i on abou t t h e s t at u s of d iv ers ity of t h e p op u l at i on is s imp l y t h at
it h el p s es t i mat e t h e ch ances t h at continu ing t h e ru n wou l d h av e
s ome p ros p ect of d is cov ering a s ol u tion t o t h e p robl em. High d iv er-
s ity wou l d giv e an ind ication t h at it is p rof itabl e t o ext end t h e ru n;
l ow d iv ers ity wou l d ind icate t h e op p os ite. Th u s , a re-s t art wi t h a
newl y s eed ed p op u l at i on migh t in t h i s s i t u at i on be t h e bet t er ch oice.
Me as ur i ng Ope r at or Effects
E ach v ariation op erat or in GP h as its own ef f ect on t h e p op u l at i on
and on t h e emergent d ynami c of t h e ru n. By obs erv ing th es e ef f ects ,
one can t r y t o s ee wh ich op erat ors are u s ef u l in a cert ai n s t age of t h e
ev ol u tion and wh ich are not .
To d is tingu is h between u s ef u l and u s el es s op erat ors , one h as t o
is ol ate t h ei r ef f ects rad ical l y. I f a generat i onal s el ection s ch eme is
u s ed , it wil l in general not be p os s ibl e t o d is cern t h e ef f ect of d if f erent
op erat ors . Th eref ore, a t ou r nament or (/x, A ) s el ection s ch eme s h ou l d
be u s ed t o ch eck i mmed i at el y wh ich ef f ects h av e been cau s ed by an
op erat or. A l s o, each op erat or s h ou l d be ap p l ied excl u s iv el y, i.e., no
s equ ence of op erat ors (ap art f rom rep rod u ct i on) s h ou l d be al l owed .
Crossover Effects Th e mos t u s ef u l meas u rement of op erat or ef f ects t o d at e h as been
t h at of t h e ef f ects of cros s ov er on t h e f itnes s of p arent s rel ativ e t o t h e
f itnes s of t h ei r ch il d ren. Th e goal is t o be abl e t o as s ign any op erat or
ev ent - h ere, cros s ov er - into a cat egory t h at tel l s u s wh et h er it
was s u cces s f u l , neu t ral , or u ns u cces s f u l . Two bas ic ap p roach es t o
meas u ri ng t h e ef f ect of cros s ov er h av e been d is cu s s ed earl ier in t h e
book.
Th e av erage f itnes s of bot h p arent s h as been comp ared wi t h t h e
av erage f itnes s of bot h ch il d ren [Nord in and Banzh af , 1995a]
8.4 Analysis and Measurement of Online Data
[Nord in et al ., 1996]. I f t h e av erage of t h e ch il d ren is more
t h an 2. 5% bet t er t h an t h e av erage of t h e p arent s , t h e cros s -
ov er is cou nt ed as being cons tru ctiv e; if more t h an 2. 5% wors e,
it is cou nt ed as being d es t ru ct i v e; and if t h e av erage f itnes s
f or t h e ch il d ren is wi t h i n 2.5% of t h e p arent s , it is cou nt ed as
neu t ral . Th e ef f ect of t h i s meas u rement t ech ni qu e is t h at bot h
p arent s and bot h ch il d ren are cou nt ed as one cros s ov er ev ent.
Th i s met h od giv es t h ree s imp l e onl ine meas u rement s t h at can
be f ol l owed d u ri ng ev ol u tion.
Th e f itnes s of ch il d ren and p arent s are comp ared one by one
[Francone et al ., 1996] [Tel l er, 1996]. I n t h i s ap p roach , one ch il d
is as s igned t o one p arent . Th eref ore, each s u ch p airing is cou nt ed
as one cros s ov er ev ent.
Meas u rement s of cros s ov er ef f ects h av e p er mi t t ed at l eas t two
d if f erent s ys t ems t o ach iev e ru n-t i me control ov er GP ru ns . Th os e
s u cces s es wil l be d es cribed l ater in t h i s ch ap t er.
Let u s l ook at a more f ormal way t o s t u d y op erat or ef f ects . Giv en
t h e nu mber of p red eces s ors I = 1, 2, . . . , N wi t h 1=1 f or mu t at i on,
1 = 2 f or conv entional cros s ov er, I = N f or mu l t i recombi nant op er-
ators , and a nu mber of of f s p ring J = 1, ...,M one can qu antif y t h e
"p rogres s " bet ween ind iv id u al s gained f rom ap p l yi ng op er at or k as
fitgain ik) = ( / / - fj)/fi (8.4)
wh ere / / , fj are s cal ar meas u res of t h e p art i ci p at i ng p red eces s ors and
of f s p ring, res p ectiv el y. I n t h e s imp l es t cas e th es e meas u res cou l d be
generated by t aki ng t h e ari t h met i c av erage
/ / = y l > (8-5)
and
fj=
l
1
S
tf, (8-6)
I mp rov ement s are s ignal ed by p os itiv e v al u es of fit
ga
i
n
, wh ereas d e-
teriorations are s ignal ed by negativ e v al u es (as s u ming f itnes s f al l s t o
0 f or t h e op t i mal v al u e).
I nt ron Me a s ur e me nt s
I nt rons are cod e in a GP ind iv id u al t h at d oes not af f ect t h e ou t p u t of
t h e ind iv id u al . A s we h av e s een in C h ap t er 7, a l arge p rop ort i on of
introns in a p op u l at i on of ten ind icates t h at al l ef f ectiv e ev ol u tion is
IIJ1 8 Analysis Improving Genetic Programming with Statistics
Intron Counting in Tree
Structures
ov er and t h at cros s ov er is onl y s wap p ing introns back and f orth . Th e
p roces s of as certaining t h e nu mber of introns is cal l ed in tron coun tin g.
I t is i mp or t ant t o not e t h at al l i nt ron meas u rement met h od s are
es t i mat i ons .
A s s u me a bi nary t ree wi t h ad d i t i on nod es wh ere two v al u es arc
t r ans mi t t ed u p into a nod e v ia t h e i np u t branch es and one v al u e
is t r ans mi t t ed f rom t h e nod e f u rth er u p in t h e t ree v i a t h e res u l t
branch . Th e t op nod e in Fi gu re 8.5 receiv es two i np u t s , 6 and 0. Th e
nod e its el f ad d s t h e two i np u t s t oget h er and p rod u ces t h e s u m as its
ou t p u t . Th e ou t p u t v al u e is obv iou s l y 6. Fu rt h er, it is obv iou s t h at ,
s o l ong as t h e righ t i np u t is 0, t h e res u l t wil l al ways equ al t h e l ef t
i np u t . Viewed in t h i s manner t h e righ t t ree, wh ich p rod u ces 0 as an
ou t p u t , is irrel ev ant becau s e it d oes not af f ect t h e ou t p u t v al u e of t h e
f u nction at al l .
O f cou rs e, introns are cod e t h at d oes not af f ect ou t p u t . Bu t wh at
d oes t h at mean? For an i nt ron, t h e ou t p u t of t h e nod e in Fi gu re 8.5 is
t h e s ame as t h e l ef t-h and s id e i np u t f or al l f itnes s cas es . Pu t anot h er
way, if t h e ou t p u t is t h e s ame as one of t h e i np u t s f or al l f itnes s cas es ,
t h en we regard t h e irrel ev ant s u bt ree t oget h er wi t h t h e nod e u nd er
exami nat i on as an i nt ron.
Th e al gori t h m f or meas u ri ng tree-bas ed i nt rons is not v ery com-
p u t at i onal l y exp ens iv e. E ach nod e contains a f l ag i nd i cat i ng wh et h er
t h i s nod e s o f ar h as h ad t h e s ame ou t p u t as one of t h e i np u t s . Th i s
f l ag is t h en u p d at ed by t h e ev al u ation i nt erp ret er each t i me it p as s es
t h e nod e - f or each f itnes s cas e. Wh en al l f itnes s cas es h av e been
cal cu l ated , t h e tree is p as s ed t h rou gh again t o s u m u p t h e i nt ron
cont ent s by anal yzing t h e f l ag v al u es .
Figu re 8.5
Intron measurement in
tree-based GP
Intron Counting in
Linear Genomes
I nt ron cou nting began wi t h l inear genomes in A I MGP. Not s u r-
p ris ingl y, t h e t ech ni qu e is s traigh tf orward . Th e genome is a s t ri ng of
mach i ne i ns t ru ct i ons becau s e A I MGP ev ol v es mach i ne cod e d irectl y.
O t h er l inear GP s ys t ems cou l d ev ol v e l inear s equ ences of cod e (LoC ).
A no-op i ns t ru ct i on ( NO P) , i.e., an op erat i on t h at d oes not h i ng, can
be ins erted in p l ace of each i ns t r u ct i on/ LoC in ord er t o ch eck wh et h er
t h i s p art i cu l ar i ns t r u ct i on/ LoC is ef f ectiv e in t h e cod e or not . Th u s ,
an i nt ron cou nt i ng met h od wou l d read :
8.4 Analysis and Measurement of Online Data
For each i ns t r u ct i on/ LoC in t h e ind iv id u al d o:
1. Ru n each f itnes s cas e t h r ou gh t h e ind iv id u al and s tore t h e ou t-
p u t v al u es .
2. Rep l ace t h e i ns t r u ct i on/ LoC wi t h a NO P-i ns t ru ct i on.
3. Reru n t h e f itnes s f u nction on each f itnes s cas e.
4. I f t h ere was no ch ange f or any of t h e f itnes s cas es af ter t h e NO P
was exch anged then cl as s if y t h e i ns t r u ct i on/ LoC as an intron
else cl as s if y it as an exon.
5. Remov e t h e NO P- i ns t r u ct i on/ LoC and rep l ace it wi t h t h e orig-
inal one.
Wh en t h i s p roced u re is comp l et ed t h e nu mber of i nt rons is s u mmed
togeth er as t h e intron l ength of t h at ind iv id u al . Howev er, t h i s is not
t h e onl y met h od t o meas u re introns . A t t h e moment , res earch ers are
activ el y exami ni ng v ariou s met h od s f or i nt ron remov al .
Compr e s s i on Me a s ur e me nt
I n t h e p rev iou s ch ap t er it was argu ed t h at t h e ef f ectiv e l ength of
an ind iv id u al of ten is red u ced d u ri ng ev ol u tion. Th i s p h enomenon
is cal l ed comp res s ion. C omp res s ion can be es t i mat ed wi t h a s imp l e
met h od . We meas u re t h e ef f ectiv e l engt h by s u bt r act i ng t h e l engt h
of t h e i nt rons f rom t h e t ot al l ength . E v ery t i me t h e f itnes s of t h e
bes t i nd i v i d u al ch anges , we s t ore t h e v al u e of t h e ef f ectiv e l ength .
A t t ermi nat i on of a ru n, we meas u re t h e d if f erence bet ween ef f ectiv e
l engt h of t h e bes t ind iv id u al and t h e s t ored v al u e. Wh en f itnes s
s t agnat es at t h e end of a ru n, we can s ee h ow mu ch t h e ef f ectiv e s ize
of an ind iv id u al h as d ecreas ed s ince it as s u med its f itnes s v al u e f or
t h e f irs t t i me. I t is al s o p os s ibl e t o s tore t h e nu mber of generat i ons
ov er wh ich t h i s comp res s ion h as t aken p l ace.
No d e Us e and Bl oc k Ac t i vat i on
Node use and block activation are two ot h er i mp or t ant onl ine anal -
ys is tool s . Nod e u s e meas u res h ow of ten i nd i v i d u al nod es f rom t h e
t ermi nal and f u nction s et are u s ed in t h e p res ent generat i on. Th e
ru n-t i me ov erh ead is s mal l , s ince meas u ri ng j u s t means i ncrement i ng
a cou nter as s ociated wi t h a nod e.
Th e s ame meas u re can be ap p l ied t o bl ocks of cod e, t h at is , t o
s u bt rees of arbi t rary d ep t h , al t h ou gh t h i s ap p roach wil l qu ickl y be-
come u nf eas ibl e f or l arger s u bt rees d u e t o combi nat ori al exp l os ion
(s ee S ection 8.3.2).
8 Analysis Improvi ng Genetic Programmi ng wi t h Statistics
Bl ock activ ation is d ef ined as th e nu mber of times th e root nod e
of a bl ock is execu ted . Th is requ ires an ad d itional cou nter record ing
th e nu mber of times th e nod e h as been activ ated .
By l ooking at nod e u s e one can eas il y get an imp res s ion of h ow
imp ortant a certain f u nction or terminal is in a p articu l ar p robl em.
A nod e migh t tu rn ou t nev er to be u s ed ov er cons ecu tiv e generations ,
ind icating th at it is mainl y a bu rd en in th e s earch p roces s and h as
no obv iou s ad v antage f or s u cces s f u l p rograms . I n a new ru n it cou l d
be d is card ed or s u bs titu ted by a p otential l y better s u ited nod e.
Th e read er is ad v is ed , h owev er, to be caref u l wh en u s ing s u ch
an obs erv ational meas u re, becau s e th e obs erv ed f requ encies cou l d be
mis l ead ing. I ntrons of ten comp ris e a l arge p art of ev ol v ed p rograms ,
and meas u ring nod e u s e f or introns wou l d ind icate h igh u s age wh ere
no u s e is mad e of th e nod e f or beh av ioral p u rp os es . I t f ol l ows th at
it wou l d be better to meas u re nod e u s e on ef f ectiv e cod e onl y. Th is
way, one cou l d at l eas t ignore th os e p arts of th e cod e th at d o not
contribu te to f itnes s .
Ros ea [Ros ea, 1995a] introd u ced anoth er term, salien t block, as
a means to ind icate th os e p arts of th e cod e wh ich inf l u ence f itnes s
ev al u ation. A good mod u l arization meth od , in h is p rop os al , s h ou l d
id entif y th os e bl ocks . Ros ea p rop os es to cons id er bl ock activ ation as
one p iece of inf ormation neces s ary to id entif y s al ient bl ocks . Bl ock ac-
tiv ation, h owev er, can u s u al l y be meas u red onl y f or trees with a s mal l
d ep th . For d etail s of th e meth od , s ee [Ros ea and Bal l ard , 1994a].
Real -Ti me Run Control Using Online Measurements
Two s ys t ems h av e s u cces s f u l l y u s ed onl ine meas u rement s t o ef f ect
onl ine control d u ri ng a GP ru n. ,.
;
.. >, ,. . .. . _ .....
PADO
C h ap ter 6 d es cribes h ow Tel l er cond u cted meta-l earning d u ring
PA DO ru ns . Th e meta-l earning mod u l e ch anged th e cros s ov er
op erator its el f d u ring th e ru n. Like its f itnes s f u nction, th e
meta-l earning mod u l e u s ed onl ine meas u rements of th e ef f ect
of cros s ov er.
AI MGP
We p erf ormed a v ery l arge GP s tu d y inv ol v ing 720 ru ns . A
ru nning total was maintained f or each generation of th e p er-
centage of total cros s ov er ev ents th at cons titu ted d es tru ctiv e
cros s ov er. Des tru ctiv e cros s ov er u s u al l y exceed s 75% of total
cros s ov er ev ents . Prev iou s s tu d ies [Nord in et al ., 1996] es tab-
l is h ed th at, wh en d es tru ctiv e cros s ov er f el l bel ow 10% of total
8.5 Generalization and Induction
m
cros s ov er ev ents , intron exp l os ion h ad occu rred and al l ef f ectiv e
ev ol u tion was ov er.
A s a res u l t of t h i s p rev iou s s tu d y, a ru n-t i me t ermi nat i on cri-
t eri on was ad op t ed : t er mi nat e t h e ru n af ter 200 generat i ons or
wh en d es t ru ct i v e cros s ov er f al l s bel ow 10% of t ot al cros s ov er
ev ents , wh ich ev er comes f irs t. Th e res u l t of u s ing t h i s t ermi na-
tion criterion was t h at t h e ru n t i me f or al l 720 ru ns was red u ced
by 50%. I n s h ort , t h i s ru n-t i me t ermi nat i on criterion ef f ectiv el y
d ou bl ed t h e s p eed of t h e s ys t em [Francone et al ., 1996].
8.5 Generalization and Inducti on
O nce u p on a time, th ere was a l ittl e girl named E mma. E mma
h ad nev er eaten a banana, nor h ad s h e been on a train. O ne d ay
s h e went f or a jou rney f rom New York to Pitts bu rgh by train.
To rel iev e E mma' s anxiety, h er moth er gav e h er a l arge bag of
bananas . A t E mma' s f irs t bite of a banana, th e train p l u nged
into a tu nnel . A t th e s econd bite, th e train broke into d ayl igh t
again. A t th e th ird bite, Lo! into a tu nnel ; th e f ou rth bite, La!
into d ayl igh t again. A nd s o on al l th e way to Pitts bu rgh and to
th e bottom of h er bags of bananas . O u r brigh t l ittl e E mma tol d
h er grand p a: "E v ery od d bite of a banana makes you bl ind ; ev ery
ev en bite p u ts th ings righ t again."
A f ter Li and HA NS O N
Th is s t ory is an examp l e of t h e p rincip l es and ris ks of in duction . We
u s e GP t o f ind a general l y v al id s et of ru l es or p at t er ns f rom a s et
of obs erv ations . C h ap t er 1 d es cribed h ow mach i ne l earning s ys t ems
d o th eir l earning on a train in g set. For E mma, h er t rai ni ng s et is
h er t rai n rid e. GP, mach i ne l earning, and E mma al l h av e t ri ed t o d o
s omet h i ng more - t h ey h av e t ri ed t o come u p wi t h general ru l es t h at
wil l work on d at a they did n ot learn upon . C h ap t er 1 ref erred t o t h i s
t yp e of d at a as a testin g set.
General ization occu rs wh en l earning t h at occu rs on t h e t rai ni ng
d at a remai ns , t o s ome ext ent , v al id on t es t d at a. Viewed anot h er way, Gen eralization as a
general ization is a p robl em of d rawing a s amp l e f rom a p op u l at i on and Samplin g Problem
maki ng p red ictions abou t ot h er s amp l es f rom t h e s ame p op u l at i on.
Th e nois e f rom one s amp l e t o t h e next is p robabl y d if f erent, p erh ap s
a l ot d if f erent. I n ot h er word s , s amp l i ng error can be a big p robl em.
Recal l t h at s amp l i ng error can cau s e t h e 95% conf id ence interv al on
t h i rt y s amp l es t o ext end al l t h e way f rom 40% t o 78%.
Bu t t h ere is anot h er, p erh ap s equ al l y d if f icu l t p robl em commonl y Overfittin g
ref erred t o as ov erf itting. I d eal l y, GP wou l d l earn t h e t r u e rel ation-
s h ip between t h e i np u t s and t h e ou t p u t s and wou l d ignore t h e nois e.
FSffli 8 Analysis Improvi ng Genetic Programmi ng wi t h Statistics
Bu t GP is cons tantl y p u s h ed by its f itnes s f u nction to l ower th e error
on th e training d ata. A f ter GP h as mod el ed th e tru e rel ations h ip ,
GP ind iv id u al s can and d o continu e to imp rov e th eir f itnes s by l earn-
ing th e nois e u niqu e to th e s amp l e th at comp ris es th e training d ata
- th at is , by ov erf itting th e training d ata. A n ov erf it ind iv id u al wil l
of ten p erf orm p oorl y on th e tes t s et.
Let's go back to p oor E mma. O f cou rs e, h er l earning is not l ikel y
to general ize th e next time s h e eats a banana in, s ay, h er kitch en. S h e
h as l earned th e nois e in h er training s et. Bu t can th is be a p robl em
in actu al mach ine l earning and GP? I t can. O v erf itting h as p l agu ed
th e neu ral network worl d and s ome GP res earch ers h av e noted its
exis tence in th eir ru ns . Th ree f actors may p l ay a p art in cau s ing
ov erf itting:
1. Complexity of the learned solution
I n S ection 3.3 we d is cu s s ed th e comp l exity of comp u ter p ro-
grams . Th e s imp l er th e s ol u tion, th e h igh er th e p robabil ity
th at it wil l general ize wel l . More h as to be s aid abou t th is
bel ow.
2. Amount of ti me spent training
I n neu ral networks , it is imp ortant to s top training bef ore th e
network ov erf its th e d ata. A l arge p art of neu ral network l iter-
atu re d eal s with th is p robl em. I t is not cl ear yet h ow th is f actor
f its into GP training becau s e th e end of training can be a v ery
comp l ex d ynamic (s ee C h ap ter 7).
3. Size of the training s et
Th e s mal l er th e training s et (i.e., th e s mal l er th e s amp l e s ize
f rom th e p op u l ation), th e l es s rel iabl e th e p red ictions mad e
f rom th e training s et wil l be.
Th e next s ection p res ents an examp l e of ov erf itting cau s ed by th e
f irs t and s econd f actors abov e.
8.5.1 An Example of Overfi tti ng
and Poor Generalization
Here is an examp l e of h ow extens iv e training and comp l ex s ol u tions
can cau s e ov erf itting of nois y d ata. Th e tas k is to l earn th e s imp l e
qu ad ratic f u nction:
y = x
2
(8.7)
in th e interv al between x = 1 and x = +1.
A s imp l e s ine f u nction f ormed th e atoms of ou r l earning s ys tem:
y = a sin (bx + c) + K (8.8)
8.5 Generalization and Induction
Th es e were s u bj ect ed t o a h il l cl imbing al gori t h m. We v aried t h e
comp l exity of t h e s ol u tion by ad d i ng more s ine t erms . For examp l e:
y a s in(6x + c) + d s in(ea; + / ) + K (8.9)
Figure 8.6
Results of learning with 1
degree of freedom
Let u s ref er t o a s ol u tion cont ai ni ng on e s ine exp res s ion as h av ing
one d egree of f reed om, a s ol u tion containing two as h av ing two d egrees
of f reed om, and s o f orth . Wh i l e t h i s is not a f ormal u s e of t h e t er m
d egrees of f reed om, we u s e it h ere f or conv enience.
Nois e was ad d ed t o t h e f u nction' s 200 s amp l e v al u es between
0.5 and 0.5. Th e nois e was d i s t ri bu t ed normal l y arou nd 0 wi t h
a s t and ar d d ev iation of 0. 1. Newt oni an d es cent was t h en u s ed t o
f ind s ol u tions t o t h e d at a wi t h 1, 2, 4, 8, and 16 d egrees of f reed om.
Th e al gori t h m was ru n as l ong as any i mp rov ement was f ou nd by t h e
al gori t h m (th is was t o encou rage ov erf itting by t rai ni ng f or t oo l ong).
Figu res 8.6, 8.7, and 8.8 s h ow a d r amat i c ch ange in t h e nat u r e
of t h e l earning t h at occu rs as t h e d egrees of f reed om increas e. Wi t h
onl y one d egree of f reed om, t h e real f u nction is f ou nd in t h e nois e
v ery accu ratel y. Bu t as t h e d egrees of f reed om increas e, t h e l earning
began t o f it t h e nois e. A t s ixteen d egrees of f reed om, t h e s ys t em is
mod el ing t h e nois e rat h er ef f ectiv el y.
8 Analysis Improvi ng Genetic Programmi ng wi t h Statistics
-0.2
-0.5 -0.4 -0.3 -0.2 -0.1 0.1 0.2 0.3 0.4 0.5
Figure 8.7
Results of learning with 4
degrees
Wh en t h e comp l ex s ol u tions were t es t ed on new v al u es of x be-
tween 1 and +1 wi t h differen t r and om nois e,
9
t h e s t ory was com-
p l etel y d if f erent. Th e in -sample testin g error (t h e error on p oi nt s
bet ween 0.5 and +0. 5) increas ed by 31% as t h e nu mber of d egrees
of f reed om ros e f rom one t o s ixteen. Th e ou t-of -s amp l e t es t i ng error
(t h e error f rom 1 t o +1) more t h an d ou bl ed . Th e simpler s ol u tions
general ized better.
Tabl e 8.1 s h ows t h at t h e more comp l ex s ol u tions mod el ed t h e
train in g data bet t er t h an d id t h e s imp l e s ol u tions .
Table 8.1
Comparison of learning
and generalization
performance for varying
degrees of freedom. ISE
(in-sample error):
- 0. 5 < x < +0. 5; OSE
(out-of-sample error):
- 1. 0 < x < +1. 0
Deg. of f reed om
1
2
4
8
16
Training error
1.00
1.00
0.95
0.91
0.83
I S E
1.00
1.01
1.08
1.19
1.31
O S E
1.00
0.98
0.95
2.04
2.09
9
Th e nois e was generated with p recis el y th e s ame mean and s tand ard
d ev iation; th e onl y d if f erence was th e rand om s eed .
8.5 Generalization and Inducti on
Th i s examp l e d emons t r at es cl earl y t h at GP res earch ers mu s t p ay
caref u l at t ent i on t o general ization is s u es any t i me t h ey u s e GP t o
make p red ictions on d at a ot h er t h an t rai ni ng d at a.
Learned function
Function to learn with noise
Function to learn
Fi gur e 8. 8
Results of learning
16 degrees
8.5.2 Dealing wi t h Generalization Issues
O v erf itting and s amp l i ng error are t h e p rincip al p robl ems in ma-
ch ine l earning general ization. Th ere are s ev eral met h od s of ad d res s -
ing t h es e is s u es s tatis tical l y. Th e p robl em wi t h t h es e met h od s is t h at
mos t GP s ys t ems are v ery comp u t at i onal l y intens iv e. Perf orming
enou gh ru ns t o p rod u ce a s tatis tical l y s ignif icant res u l t is s omet i mes
v ery d if f icu l t. S o t h e GP res earch er f requ entl y op t s f or no s t at i s t i cal
v al id ation or t h e f irs t t yp e of v al id ation t o be d is cu s s ed . Regard l es s
of wh at is p os s ibl e u nd er p art i cu l ar ci rcu ms t ances , t h ere is a range
of op t i ons f or d eal ing wi t h general ization is s u es .
Trai ni ng and Test Set
Th e t rad i t i onal way f or GP t o tes t general ization is t o s p l it t h e d at a
into a t rai ni ng and a tes t s et. Wh at th is p roced u re real l y amou nt s
t o, h owev er, is h av ing two s amp l es f rom on e p op u l at i on. A f ter t rai n-
EZI
8 Analysis Improving Genetic Programming with Statistics
ing, t h e bes t ind iv id u al on t h e t rai ni ng d at a is ru n on t h e tes t s et.
Becau s e t h e bes t ind iv id u al h as nev er bef ore s een any tes t d at a, its
p erf ormance is t h en u s ed as a meas u re of h ow wel l t h at ind iv id u al
wil l general ize on f u rth er s amp l es d rawn f rom t h e ov eral l s t at i s t i cal
p op u l at i on.
Th ou gh t h i s ap p roach is a good s t art i ng p oi nt t o ch eck general -
ization, it h as s ome d rawbacks . To begin wi t h , wh at criterion s h ou l d
be u s ed t o ch oos e t h e bes t ind iv id u al on t h e t rai ni ng s et? Th e ind i-
v i d u al wi t h t h e h igh es t f itnes s on t h e t rai ni ng s et may be p recis el y
t h e ind iv id u al t o av oid becau s e it migh t ov erf it t h e t rai ni ng d at a.
O ne way ou t of t h i s p robl em wou l d be t o h av e a good s t op p i ng crite-
rion. I f we knew j u s t wh en t o s t op t h e ru n, t h at wou l d be a p owerf u l
s ol u t i on.
10
A not h er ap p roach wou l d be t o tes t ot h er ind iv id u al s f rom t h e
ru n on t h e tes t s et t o f ind a bet t er general izer. Bas ed on exp erience,
t h i s met h od p rod u ces d ecent res u l ts as l ong as t h e ind iv id u al al s o
j p erf orms wel l on t h e t rai ni ng s et. Becau s e t h e t es t s et becomes now
p ar t of t h e t rai ni ng s et, h owev er, t h i s met h od h as a s eriou s p robl em:
Th e t es t s et ceas es t o be an i nd ep end ent s et u s ed onl y f or meas u ri ng
1
p erf ormance. Th eref ore, it is cal l ed t h e v al id ation s et and a new t es t
s et h as t o be i nt rod u ced .
11
;
J > ? ' ; - '' -.: * '< 'C 0-
.
v
-
t i
Addi ng a Ne w Te s t S et
A d d i ng a t h i r d s et of d at a t h at t h e s ys t em h as nev er p rev iou s l y s een
<v f or p erf ormance-meas u ri ng p u rp os es s h ou l d be encou raged . Bu t a
s ingl e i nd ep end ent test set h as p robl ems al l of its own. A gain, v ari-
ance and s amp l i ng error are i mp or t ant qu ant i t i es t o cons id er.
The Varian ce of the A n examp l e wil l h el p . S u p p os e a tes t s et is comp ris ed of 100
Mean Prediction Error ins tances and t h e bes t ind iv id u al h as a mean error of onl y 1.2% on
t h e tes t s et. We s h ou l d not yet be s atis f ied , and a f ew t es t s s h ou l d
be p erf ormed f irs t.
Th e v ariance of t h e p red i ct or on t h e tes t s et is one es s ential t es t .
Th e mean error of 1.2% h id es wh et h er t h e ind iv id u al errors are al l
cl os e t o 1.2% or wh et h er t h ey f requ entl y exceed 5% or 5%. A 5%
error cou l d be a d is as ter in many p red ictiv e mod el s . I t is p os s ibl e
t o es t i mat e t h e s t and ar d d ev iation of t h e p op u l at i on f or t h e mean of
t h e p red i ct i on error. Let fi be t h e mean of t h e abs ol u t e errors f or
t h e p red ictor. Let /u
t
be t h e i-th abs ol u t e error. Let n be t h e s amp l e
s ize. A n es t i mat e of t h e s t and ar d d ev iation of t h e errors f rom t h e
10
Th e increas ing p ower of th e onl ine ind icators l end s h op e th at th is may
be p os s ibl e s ome d ay.
11
I n th e l iteratu re, tes t and v al id ation s et are s ometimes interch anged .
8.6 Conclusion MdtH
p op u l at i on can t h en be giv en as :
1
n
T
_
I
2 ( / i i - M )
2
(8-10)
i =i
I f t h e d i s t ri bu t i on of t h e errors ap p ears normal and if <r
M
=; 0.8, t h en
one cou l d cau tiou s l y concl u d e t h at 95% of t h e p red i ct i ons wil l h av e
an error no great er t h an 1.6%.
Th e abov e equ at i on is not v al id f or s t at i s t i cs l ike p ercentil es or Measurin g the Varian ce
p ercentage of p red i ct i ons wh ere t h e error is great er t h an a cert ai n of Statistics Other
p ercent age. For th os e p red ictions , one can ad d new s ets of tes t d at a. Than Mean Error
Were it p os s ibl e t o d raw 1000 tes t s ets of 100 ins tances each and
to rep eat ed l y tes t t h e bes t ind iv id u al on th os e 1000 tes t s ets , t h e
v ariance cau s ed by t h e s amp l i ng error cou l d be cal cu l ated eas il y and
one cou l d as s es s in th is way wh et h er t h e bes t ind iv id u al was wort h
keep ing. I n d at a-mi ni ng ap p l ications , s u ch a br u t e f orce ap p roach
may be f eas ibl e. Bu t in mos t GP ap p l ications , d at a is d ear and one
h as t o make t h e mos t of l imited d at a.
Th ere are p owerf u l s t at i s t i cal tech niqu es not cov ered h ere t h at
may be u s ed t o estimate t h e bias and v ariance of any s t at i s t i c f rom
s p ars e d at a. Th e tech niqu es go by s u ch names as t h e Jackkn ife and
t h e Bootstrap. I f t es t i ng a GP ind iv id u al u s es meas u res ot h er t h an t h e
mean error, t h es e tech niqu es can imp rov e t h e res earch er' s conf id ence
in t h e integrity of t h e res u l ts . O r t h ey can rev eal v ariance s o wid e as
t o rend er t h e p red i ct i ons mad e by t h e GP ind iv id u al u s el es s . E i t h er
way, cru cial inf ormation can be obt ai ned .
Speci al Techni ques for Cl assi f i cat i on
C l as s if ication p robl ems are increas ingl y being conf ronted by GP s ys -
tems as more GP res earch ers at t ack real -worl d p robl ems . Many cl as -
s if ication mod el s are s t ru ct u red s o t h at t h e ou t p u t ind icates wh et h er
an i ns t ance is a member of a cl as s or not . I n t h at cas e, Kend al l ' s
t s core meas u res h ow wel l t h e s ys t em d is tingu is h es ins tances f rom
non-ins tances [Wal ker et al ., 1995]. I t is a good s t ar t i ng meas u re
with wh ich t o j u d ge t h e p red ictions of a cl as s if ication s ys t em.
8.6 Conclusion
Th e common t h r ead ru nni ng t h rou gh t h i s ch ap t er is observe, mea-
sure, and test. Th e tool s t o es t i mat e t h e p red ictiv e v al u e of GP
mod el s exis t and are eas il y ap p l ied t o GP. Th e tool s t o imp rov e GP
s ys tems or t o tes t th eories abou t , s ay, t h e cros s ov er op erat or, exis t
and can be ap p l ied eas il y. Wh at is need ed is a d ecis ion t o u s e t h em.
\
8 Analysis Improving Genetic Programmi ng wi t h Statistics
Exercises
1. Wh at is a s tatis tical p op u l ation?
2. Wh at is a s amp l e?
3. Des cribe two bas ic s tatis tical tool s f or GP.
4. Des cribe a mov ing av erage.
5. Giv e an ov erv iew of h ow to ch oos e among inp u t s eries .
6. Wh at is an onl ine tool , and wh at is an of f line tool ?
7. Giv e f ou r d if f erent u s ef u l f itnes s meas u rements .
8. Giv e two examp l es f or d iv ers ity meas u res in p op u l ations of p ro-
gram ind iv id u al s .
9. Des cribe a meth od f or meas u ring introns in a tree-s tru ctu red
ind iv id u al .
10. Wh at is general ization? Wh at is ov erntting? How can ov ernt-
ting be av oid ed ?
' -> j ' ! > -: ..ri >'.';.' i t - . ; . , ; J / M ' - r n ;-
Further Reading
B. E f ron,
THE JA C KKNI FE , THE BO O TS TRA P
A ND O THE R RE S A MPLI NG PLA NS .
S ociety f or I nd u s trial and A p p l ied Math ematics ,
Ph il ad el p h ia, PA , 1995.
B. E f ron and R.J. Tibs h irani, rr ,- i . , ,>. ',->;;:.-_, :I,K
A N I NTRO DUC TI O N TO THE BO O TS TRA P.
C h ap man & Hal l , Lond on, 1993.
J.S .U. Hjorth ,
C O MPUTE R I NTE NS I VE S TA TI S TI C A L ME THO DS VA LI DA TI O N,
MO DE L S E LE C TI O N, A ND BO O TS TRA P.
C h ap man & Hal l , Lond on, 1994.
S .M. Weis s and C .A . Ku l ikows ki,
C O MPUTE R S YS TE MS THA T LE A RN.
Morgan Kau f mann, S an Francis co, C A , 1991.
Part I I I
Advanced Topics in
Genetic Programming
9 Differ ent Variet ies of
Genet ic Pr ogr amming
C ontents
9. 1 GP with Tree Genomes 240
9.2 GP with Linear Genomes 243
9.2.1 Evolutionary Program Induction with Introns . . 248
9.2.2 Developmental Genetic Programming 250
9.2.3 An Example: Evolution in C 254
9.2.4 Machine Language 257
9.2.5 An Example: Evolution in Machine Language . .262
9.3 GP with Graph Genomes 265
9.3.1 PADO 265
9.3.2 Cellular Encoding 266
9.4 Other Genomes 267
9.4.1 STROGANOFF 267
9.4.2 GP Using Context-Free Grammars 270
9.4.3 Genetic Programming of L-Systems 273
9 Different Varieties of Genetic Programming
Structures Used in GP We h av e al read y s een h ow t h e GP arena h as been p op u l at ed wi t h
nu merou s d if f erent ap p roach es t o p rogram ev ol u tion. I t is as tonis h ing
h ow t h e s imp l e t h eme can be v aried wi t h ou t d es troying t h e bas ic
mech ani s m. I n t h i s ch ap t er we wil l t ake a cl os er l ook at GP v ari ant s .
Tabl e 9.1 giv es an ind ication of wh ich kind s of s t r u ct u r e h av e been
u s ed wi t h GP. A s we can s ee, s ome of th es e v ari ant s are v ery d if f erent
and qu i t e i ncomp at i bl e wi t h each ot h er, a s t rengt h r at h er t h an a
weaknes s of t h e f u nd ament al id ea.
S t r u ct u r e name
S -exp res s ion
GMDH p rimitiv es
TB
J B
bi t s
bi t s
abs t r act d at e t yp es
p rod u ct i on ru l es
p rod u ct i on ru l es
PA DO
cel l u l ar encod ing
Des crip tion
tree s t r u ct u r e
t ree s t r u ct u r e
l inear p os tf ix
l inear p ref ix
l inear genomes
mach i ne cod e i ns t ru ct i ons
l is ts , qu eu es , s tacks
gr ammar s
grap h s t ru ct u re
grap h s t ru ct u re
tree gr ammar s
S ou rce
[Koza, 1992d ]
[I ba et al ., 1995b]
[C ramer, 1985]
[C ramer, 1985]
[Banzh af , 1993b]
[Nord in, 1994]
[Langd on, 1995b]
[Wh igh am and McKay, 1995]
[Jacob, 1996a]
[Tel l er and Vel os o, 1995b]
[Gru au , 1993]
Table 9.1
Some of the many
different structures used
for GP
Th e f ol l owing s ections p res ent a s el ection of t h es e v ari ant s , s t art -
ing wi t h a l ook at tree-bas ed GP, cu rrent l y in mos t f requ ent u s e in
t h e GP commu ni t y.
Td* ' , , ? * MH5 < M? S t i i b C h.fi
9.1 GP wi t h Tree Genomes
Th e general working of GP on trees was i nt rod u ced in C h ap t er 5.
1
Here we s h al l rev iew t h e d if f erent t yp es of op erat ors t h at h av e been
i nt rod u ced ov er t h e years f or mani p u l at i ng t ree s t ru ct u res . A s men-
t i oned earl ier, t h e s imp l es t op erat or is t h e reproduction operator wh ich
d oes not h i ng bu t cop y t h e ind iv id u al into t h e next generat i on. Th e
next more comp l icated op erat or is t h e mutation operator wh ich act s
on a s ingl e tree at a t i me. Tabl e 9.2 giv es an ov erv iew of wh at s orts
of mu t at i on op erat ors h av e been u s ed wi t h t rees . Figu res 9.1-9.6
s u mmari ze grap h ical l y t h e ef f ect of cert ai n mu t at i on op erat ors .
I n many ap p l ications , t h e mu t at i on op erat or is not ap p l ied d i-
rectl y t o a rep rod u ced ind iv id u al , bu t is ap p l ied t o t h e res u l t of
1
Th ere are trees of d if f erent kind s . Mos tl y we s h al l u s e "exp res s ion"
trees in ou r examp l es .
9.1 GP wi t h Tree Genomes
Figure 9. 1
Different mutation
operators used in tree-
based GP: point mutation
anoth er op erator, canonical l y working on two trees : cros s ov er. If
cros s ov er is u s ed as th e f ol l ow-u p op erator to rep rod u ction, two ind i-
v id u al s are cop ied into th e next generation. S u bs equ entl y, one nod e
is s el ected in each tree and th e s u btree bel ow th is nod e is cu t ou t
and trans f erred to th e l ocation of th e nod e s el ected in th e s econd
tree, and v ice v ers a. Th e f u nction of cros s ov er is to s wap genetic
material between trees .
2
A s Tabl e 9.3 s h ows , v ariou s cros s ov er op er-
ators are ap p l icabl e to trees and it is a matter of a priori ch oice and
imp l ementation wh ich one to take in an actu al ru n.
2
Us age of th e cros s ov er op erator to generate on e new ind iv id u al is al s o
v ery common.
i > m
9 Di fferent Varieties of Genetic Programmi ng
O p er at or name
p oint mu t at i on
p er mu t at i on
h ois t
exp ans ion mu t at i on
col l ap s e s u bt ree mu t at i on
s u bt ree mu t at i on
gene d u p l i cat i on
Des crip tion of ef f ect
s ingl e nod e exch anged agains t
r and om nod e of s ame cl as s
argu ment s of a nod e p er mu t ed
new ind iv id u al generat ed
f rom s u bt ree
t ermi nal exch anged agains t
r and om s u bt ree
s u bt ree exch anged agains t
r and om t ermi nal
s u bt ree exch anged agains t
r and om s u bt ree
s u bt ree s u bs t i t u t ed f or
r and om t ermi nal
O p er at or name
s u bt ree exch ange cros s ov er
s el f cros s ov er
mod u l e cros s ov er
cont ext -p res erv i ng cros s ov er
S C PC
WC PC
Des crip tion of ef f ect
exch ange s u bt rees
bet ween ind iv id u al s
exch ange s u bt rees
bet ween ind iv id u al and its el f
exch ange mod u l es
between ind iv id u al s
exch ange s u bt rees if
coord i nat es mat ch exactl y
coord i nat es mat ch ap p roxi mat el y
Table 9.3
Crossover operators
applied within tree-based
GP CPC:
con text-preservin g Th ere s h ou l d be a cl os e corres p ond ence between cros s ov er and
crossover mu tation op erators , th e f ormer being ap p l ied to two ind iv id u al s and
s wap p ing inf ormation between th em and th e l atter being ap p l ied to
one ind iv id u al al one with ad d itional rand om action. O ne can as -
s u me th at a cros s ov er op erator can be cons tru cted to corres p ond to
each mu tation op erator, and v ice v ers a. Th e f act th at th is h as not
been d one s ys tematical l y in th e p as t s ays more abou t th e s tatu s of
s ys tematization in GP th an abou t th e p otential of th os e op erators .
Figu res 9.7-9.9 s u mmarize grap h ical l y th e ef f ect of certain cros s -
ov er op erators on trees .
Table 9.2
Mutation operators
applied in tree-based GP
9.2 GP with Linear Genomes
JED
Figure 9.2
Different mutation
operators used in tree-
based GP: permutation
9.2 GP wi t h Linear Genomes
Lin ear GP act s on l inear genomes , l ike p rogram cod e rep res ent ed by
bit s trings or l ines of cod e f or regis ter mach ines . Bef ore we d is cu s s
a f ew v ari ant s of l inear GP we s h ou l d cont ras t t h e beh av ior of l inear
GP t o t h at of tree-bas ed GP.
Wh en we cons id er t h e ef f ects of ap p l ying d if f erent op erat ors t o
tree ind iv id u al s t h ere is one as p ect of t h e h ierarch ical tree rep re-
s ent at i on t h at s p ecif ical l y at t r act s ou r at t ent i on: in a h ierarch ical
rep res ent at i on t h ere is a comp l icated interp l ay between t h e ord er of
execu tion of t h e p rogram and t h e inf l u ence of ch anges mad e at v ar-
tfllU 9 Different Varieties of Genetic Programming
Figure 9.3
Different mutation
operators used in tree-
based GP: hoist
iou s l ev el s of t h e t ree. Trees are u s u al l y execu ted in a d ep th -f irs t
manner, i.e., t h e l ef t branch es of nod es are ev al u at ed bef ore t h e righ t
branch es . Th u s ord er of execu tion is f rom l ef t t o righ t. Howev er, t h e
inf l u ence of ch ange is d et ermi ned in a h ierarch ical rep res ent at i on by
t h e l ev el at wh ich a p art i cu l ar nod e res id es . A n exch ange at a d eep er
l ev el in t h e p rogram tree wil l nat u ral l y h av e f ewer cons equ ences t h an
an exch ange at a h igh er l ev el .
For t h e f ol l owing cons id eration we h av e t o make two s imp l if ying
as s u mp t i ons , t h ey are, h owev er, not v ery res trictiv e. Fi rs t , we s h al l
as s u me t h at ou r t ree is cons t ru ct ed f rom bi nary f u nctions . S econd ,
we s h al l as s u me t h at trees are (nearl y) bal anced .
Operator Hit Rate De f i ni t i on 9. 1 The hi t r a t e of an operator in relation to a feature
of n odes is the probability by which on e n ode or more n odes in the
tree possessin g this particular feature are selected for operation .
9.2 GP wi t h Linear Genomes UM4
Figure 9.4
Different mutation
operators used in tree-
based GP: expansion
mutation
Pu t p l ainl y, t h e h it rat e of nod es in t h e d eep es t l ev el of a t ree, i.e.,
nod es wi t h t h e f eatu re of being on t h e d eep es t l ev el , is - as s u mi ng
bal anced bi nary trees - 1/2. I t f ol l ows t h at al l nod es in t h e res t of t h e
tree p os s es s a h it r at e of 1/2 in t ot al , with 1/4 going t o t h e s econd
d eep es t l ev el , 1/8 t o t h e next h igh er l ev el , and s o on. Hence, wi t h
ov erwh el ming p robabil ity, nod es at t h e l owes t l ev el are h it mos t of ten
f or cros s ov er or mu t at i on op erat i ons .
3
3
Very of ten, th eref ore, p recau tions are taken in tree-bas ed GP s ys tems
to av oid h igh h it rates at th e l owes t l ev el of a tree by bias ing th e h it rate.
nn
9 Di fferent Varieties of Genetic Programmi ng
Figure 9.5
Different mutation
operators used in tree-
based GP: collapse
subtree mutation
Togeth er, th e two f acts mentioned abov e res u l t in th e concl u s ion
th at in tree-bas ed GP, th e mos t f requ ent ch anges are s mal l . Th is is
tru e f or al l op erators u nif orml y s el ecting nod es f rom a tree.
Th e inf l u ence of ch ange in a l inear s tru ctu re can be exp ected to
f ol l ow th e l inear ord er in wh ich th e ins tru ctions are execu ted . A n ex-
ch ange l ater in th e s equ ence wil l h av e f ewer beh av ioral cons equ ences
th an an exch ange earl ier on. Th e h it rate of op erators , on th e oth er
h and , in rel ation to th e p os ition of a nod e or ins tru ction in th at
s equ ence is equ al f or th e entire l inear genome. Hence, it can be ex-
p ected th at in GP with l inear rep res entations , ch anges of al l s izes are
equ al l y f requ ent. Th is is tru e f or al l op erators u nif orml y s el ecting
nod es f rom a s equ ence.
9.2 GP wi t h Linear Genomes WAM
Figure 9.6
Different mutation
operators used in tree-
based GP: subtree
mutation
Fi gu re 9.10 d emons t rat es t h e beh av ior of tree-bas ed GP f or a
s imp l e regres s ion p robl em. Th e amou nt of ch ange (i mp rov ement s
as wel l as d eteriorations ) rel ativ e t o t h e f itnes s of p red eces s ors is
record ed . S mal l ch anges are by f ar t h e mos t f requ ent ones .
Fi gu re 9.11 s h ows a marked d if f erence t o Fi gu re 9.10. Here, t h e
s ame regres s ion p robl em h as been ap p roach ed wi t h mach i ne l angu age
GP. C h anges of al l s izes are more f requ ent, wh ich can be s een f rom
t h e d i s t ri bu t i on of t h e aggregations of bl ack d ot s .
We s h ou l d keep in mi nd t h at res u l ts f rom t h i s comp ari s on are
not yet concl u s iv e, bu t it is an interes ting res earch area t o comp are
t h e beh av ior of d if f erent rep res ent at i ons in genetic p rogrammi ng.
MrlbU 9 Di fferent Varieties of Genetic Programmi ng
Figure 9.7
Different crossover
operators used in tree-
based GP: subtree
exchange crossover
Figure 9.8
Different crossover
operators used in tree-
based GP: selfcrossover
c
,S " > v
'K.V - V, /
VJV * \J
u
9. 2. 1 Evol ut ionary Pr ogr am Induct ion wi t h Int rons
Wi neberg and O p p ach er [Wineberg and O p p ach er, 1994] h av e f or-
mu l at ed an ev ol u tionary p rogrammi ng met h od t h ey cal l EPI (ev o-
l u t i onary p r ogr am i nd u ct i on). Th e met h od is bu il t on a canonical
genetic al gori t h m. Th ey u s e f ixed l engt h s trings t o cod e t h ei r ind i-
9.2 GP wi t h Linear Genomes
S3
Figure 9.9
Different crossover
operators used in tree-
based GP: module
crossover
Figure 9.10
Changes during an
evolutionary run for a
regression problem in
tree-based GP. Each dot
denotes a change relative
to predecessors. Small
changes are most
frequent.
1000 2000 3000 4000 5000 6000 7000
v id u al s and a GA -l ike cros s ov er. Howev er, t h ei r l inear genomes cod e
f or trees t h at are id entical t o p rogram trees in tree-bas ed GP. Th e
f ixed l ength of ind iv id u al s and t h ei r cod ing s ch eme imp l y a p red ef ined
maxi mal d ep t h of trees in ev ol u tionary p rogram i nd u ct i on wi t h in-
t rons . Th e cod ing is cons t ru ct ed t o mai nt ai n a f ixed s t r u ct u r e wi t h i n
t h e ch romos ome t h at al l ows s imil ar al l el es t o comp et e agains t each
ot h er at a l ocu s d u ri ng ev ol u tion. A s a cons equ ence, t h e genome
normal l y wil l be f il l ed wi t h i nt rons , wh ich t h ey argu e is benef icial t o
t h e s earch p roces s [Wineberg and O p p ach er, 1996].
1M1
9 Di ffe r e n t Var i et i es of Genet ic Pr og r a mmi n g
Figure 9. 11
Changes during an
evolutionary run for a
regression problem in
linear (AIMGP)
representation. Each dot
symbols a relative change
to predecessors. Changes
show levels that are most
frequent.
1000 2000 3000 4000 5000 6000 7000 8000
M.
Genotypes vs.
Phenotypes
9.2.2 Developmental Genetic Programming
Developmen tal gen etic programmin g (DGP)
4
is an extens ion of GP
by a d ev el op ment al s t ep . I n tree-bas ed GP, t h e s p ace of genot yp es
(s earch s p ace) is u s u al l y id entical t o t h e s p ace of p h enot yp es (s ol u -
tion s p ace) and no d is tinction is mad e between genot yp es and p h e-
not yp es : an ind iv id u al is al ways id entif ied wi t h a comp u t er p r ogr am
of s yntactical l y correct s t r u ct u r e wh ich is i nt erp ret ed or comp il ed f or
execu tion. Dev el op ment al genetic p rogrammi ng, on t h e ot h er h and ,
map s bi nary s equ ences , gen otypes, t h r ou gh a d ev el op ment al p roces s
[Banzh af , 1994] into s ep arat e p h enot yp es . Th es e phen otypes are t h e
working p rograms wi t h t h e s ynt act i c s t r u ct u r e of an LA LR( l ) gram-
Two abs t ract p rop ert i es of h ow GP ap p roach es a p robl em are
ev id ent:
Feasible vs. Infeasible
Structures
1. GP op timizes a f itnes s meas u re t h at ref l ects t h e beh av ior of a
p r ogr am
2. Th e op t i mi zat i on p robl em is hard-con strain ed, s ince t h e s et of
f eas ibl e p oi nt s in s earch s p ace is id entical t o t h e s ol u tion s p ace.
I n t h e tree-bas ed GP ap p roach , t h e s econd p rop ert y is ref l ected by
t h e f act t h at it is a cons t rai ned s earch p roces s : creation and v ari at i on
are onl y al l owed t o yiel d f eas ibl e p rograms .
Howev er, giv en a cert ai n s ynt ax, a f u nction and t ermi nal s et, and
a maxi mal s equ ence l ength , t h e s et of inf eas ibl e p rograms is of ten ex-
t remel y l arge comp ared t o t h e s et of f eas ibl e p rograms - as ev ery
4
We h ad earl ier cal l ed th is meth od bin ary gen etic programmin g or BGP
[Kel l er and Banzh af , 1996] bu t h av e now d ecid ed DGP is more to th e p oint.
9.2 GP with Linear Genomes
JeJil
p r ogr ammer knows f rom p ainf u l p ers onal exp erience. Des p ite t h i s
f act, inf eas ibl e p rograms may contain s yntactical l y correct p ar t s t h at
cou l d p rov e u s ef u l d u ri ng ev ol u tion. A h u ge amou nt of genetic d iv er-
s ity mi gh t become u nav ail abl e t o t h e s earch p roces s if it cou l d not
make u s e of t h es e p ar t s . To make t h e d iv ers ity of inf eas ibl e p rograms
acces s ibl e, t h e s earch p roces s s h ou l d be u ncons t rai ned , i.e., t h e s earch
op erat ors s h ou l d be abl e t o accep t and t o p rod u ce an ar bi t r ar y s e-
qu ence. Pri or t o f itnes s ev al u ation, h owev er, an inf eas ibl e p rogram
s h ou l d be map p ed into a f eas ibl e p rogram. DGP i mp l ement s t h i s
f u nction by u s ing a s p ecif ical l y d es igned gen otype-phen otype map-
pin g.
Th er e is one f u rth er argu ment t o ad d p l au s ibil ity t o t h es e con-
s id erations : it is s omet i mes p ref erabl e t o s earch in a s p ace wi t h more
d imens ions t h an t h e s ol u tion s p ace. More d imens ions enabl e t h e
s earch t o cu t t h rou gh d imens ions ins tead of being f orced t o ev ol v e
al ong l onger p at h s in s ol u tion s p ace. O ne can exp ect t h at s earch ing
wi t h s h ort cu t s wil l increas e t h e p robabi l i t y of f ind ing bet t er s ol u tions
d ramat i cal l y.
A s we al read y ment i oned , genot yp es in DGP t ake t h e s imp l es t
and mos t u niv ers al f orm of a bi nary rep res ent at i on. Th e rep res ent a-
t i on of p h enot yp es (p rograms ), on t h e ot h er h and , is d et ermi ned by
t h e l angu age u s ed . S imp l e s earch op erat ors , as in s t and ar d GA s , can
be u s ed in DGP.
O nce t h e genotyp ic rep res ent at i on h as been f ixed , we can d ef ine The
t h e map p i ng between genot yp e and p h enot yp e. A t l eas t two s t ep s Gen otype-Phen otype
are need ed t o make t h e genot yp e- p h enot yp e map p i ng work: Mappin g
1. Th e h igh -d imens ional genot yp e (binary s equ ence) mu s t be tran -
scribed into t h e l ow-d imens ional p h enot yp i c rep res ent at i on (raw
s ymbol s equ ence).
2. I n cas e t h e raw s ymbol s equ ence is inf eas ibl e, it mu s t be edited
into a f eas ibl e s ymbol s equ ence.
For t rans cri p t i on, t h e obv iou s ap p roach is t o id entif y each s ymbol Tran scription
f rom t h e t ermi nal and s ymbol s et - wh ich we cou l d cal l token - wi t h
at l eas t one bi nary s u bs equ ence wh ich we s h al l cal l cod on. I f al l
cod ons h av e equ al l ength , t h ere is a map p i ng f rom t h e s et of al l n-bi t
cod ons into t h e s et of al l s ymbol s . A bi nary s equ ence of m cod ons
t h u s rep res ents a raw s equ ence of m s ymbol s .
For i ns t ance, if a, b, + are rep res ent ed by 00, 01, 10, t h en t h e raw
(and f eas ibl e) s equ ence a+b is giv en by 001001. I n t h i s examp l e, we
h av e a t h ree-d i mens i onal s ol u tion s p ace if we cons id er al l s yntactical l y
correct s ymbol s equ ences of l ength 3. Th e s earch s p ace, h owev er, h as
6 d imens ions .
9 Different Varieties of Genetic Programming
Editing Th e raw s equ ence p rod u ced by t rans cri p t i on is u s u al l y il l egal ,
and an ed iting s t ep is need ed t o map a raw s equ ence into an ed i t ed
s equ ence. Here we cons id er onl y LA LR( l ) gr ammar s [A h o, 1986],
i.e., t h e DGP as d is cu s s ed h ere can onl y ev ol v e p rograms in l angu ages
d ef ined by s u ch a gr ammar . Many p ractical l y rel ev ant l angu ages l ike
C are LA LR( l ) l angu ages . Let u s i nt rod u ce t h e not i on of a legal
symbol set: a s ymbol t h at rep res ents a s ynt ax error at its p os ition
in a raw s equ ence wil l be cal l ed illegal. Wh en, d u ri ng p ars i ng of a
raw s equ ence, an il l egal s ymbol s is d et ect ed , t h e corres p ond i ng l egal
s ymbol s et is gu arant eed t o be comp u t abl e in LA LR( l ) gr ammar s .
Th i s s et is comp u t ed and a s u bs et of it, t h e min imal-distan ce set, is
s el ected . I t h ol d s t h e cand i d at es f or rep l acing s. Dep end i ng on t h e
act u al map p i ng, t h ere can be more t h an one s u ch s ymbol . I n ord er
t o res ol v e t h i s ambigu ity, t h e s ymbol wi t h l owes t integer v al u e among
al l cod ons of cl os es t s ymbol s wil l be s el ected .
I f t h i s p roced u re is ap p l ied , ed iting wil l of ten p rod u ce s ymbol s e-
qu ences t h at t er mi nat e u nf inis h ed . For i ns t ance, ed iting cou l d res u l t
in t h e u nf inis h ed ari t h met i cal exp res s ion s in(a) *cos (f c)+. I n ord er t o
h and l e th is p robl em, we as s ign a termin ation n umber t o each s ymbol .
Th i s nu mber ind icates h ow ap p rop ri at e t h e s ymbol is f or t h e s h ort-
es t p os s ibl e t ermi nat i on of t h e s equ ence. I n t h e abov e exp res s ion, f or
i ns t ance, a v ariabl e wou l d t er mi nat e t h e s equ ence, wh il e an op er at or
s ymbol l ike s i n wou l d cal l f or at l eas t t h ree more s ymbol s , (, v ari-
abl e, ). Th e t ermi nat i on nu mber of a s ymbol is s imp l y t h e nu mber
of ad d i t i onal l y need ed s ymbol s t o t er mi nat e t h e exp res s ion. Th u s , in
t h e examp l e, a v ariabl e-s ymbol l ike a h as t ermi nat i on nu mber 0, wh il e
a s ymbol l ike sin h as t ermi nat i on nu mber 3. Not e t h at t h e nu mber of
s ymbol s actually need ed f or t ermi nat i on wh en u s ing a cert ai n s ymbol
can be l arger t h an its t ermi nat i on nu mber. For i ns t ance, t h ere cou l d
be an op en p arent h es i s p rior t o t h e end of t h e u nf inis h ed s equ ence,
wh ich h ad t o be cl os ed bef ore t ermi nat i on. S u ch context-s ens itiv e
ci rcu ms t ances s h al l not be ref l ected in a t ermi nat i on nu mber. I n cas e
t h ere are s ev eral s ymbol s wi t h equ al mi ni mal t ermi nat i on nu mber,
t h at one is t aken wh ich is encod ed by a cod on wi t h t h e l owes t i nd ex
among al l cod ons of t h e s ymbol s in qu es tion.
Tran slation E d i t i ng yiel d s a f eas ibl e s ymbol s equ ence wh ich is s u bs equ ent l y
comp l et ed by l angu age-s p ecif ic s t and ar d inf ormation s u ch as a f u nc-
tion h ead er. Final l y, t h e res u l ting p rogram is i nt erp ret ed or comp il ed
and execu ted in ord er t o ev al u at e its f itnes s .
C ons id er t h e examp l e in Tabl e 9.4. Th e genot yp e 000 001 011 is
t rans cri bed into a raw s equ ence ab*. E d i t i ng s cans a as f irs t and l egal
s ymbol . I t t h en s cans b as an il l egal s ymbol wi t h 001 as its cod on in
t h e genot yp e. {+, *} is t h e l egal s ymbol s et. Th e s ymbol cl os es t t o b
is *. Th u s , b gets rep l aced by *, t h ereby t er mi nat i ng t h e remov al of
9.2 GP wi t h Linear Genomes
Binary code
000
001
010
Oil
100
101
110
111
Token
a
b
+
*
a
b
+
*
Table 9.4
Example of redundant
genetic code mapping
codons into tokens
t h e s ynt ax error. Th e p art i al l y ed ited raw s equ ence now equ al s a * *.
E d i t i ng continu es , rep l acing t h e l as t s ymbol * wi t h b.
Th e ed ited s equ ence a * b is p as s ed on t o t rans l at i on, wh ich
ad d s , f or i ns t ance, a f u nction f rame. Th e t rans l at ed s equ ence migh t
l ook l ike d ou bl e f nc ( d ou bl e a, d ou bl e b) { r e t u r n a *b ; }. Th i s
s equ ence cou l d now be i nt egrat ed wi t h ot h er ed i t ed s equ ences , f or
examp l e, into a mai n p rogram t h at a C comp il er cou l d h and l e. E x-
ecu tion wou l d t h en al l ow t h e f itnes s of t h e corres p ond ing genot yp es
t o be ev al u at ed .
A s can be s een, 000 001 011 gets map p ed into t h e p h enot yp e a*b.
Howev er, 010 011 101, 000 011 001, and 100 111 101 al l get map p ed
into a * b as wel l . Wh en anal yzing t h i s p h enomenon, it becomes cl ear
i mmed i at el y t h at bot h t h e red u nd ancy of t h e genetic cod e and t h e
ed i t i ng mech ani s m are res p ons ibl e f or t h i s ef f ect.
Th e f ol l owing u ncons t rai ned s earch op erat ors are u s ed in DGP.
Th ey p erf orm op erat i ons on s ets of cod ons and bits wi t h i n cod ons .
C reat i on
Search Operators
Mu t at i on
Recombi nat i on
Creation generates ind iv id u al s as r and om bi nary s equ ences t h at con-
s is t of m-bi t cod ons . Mutation may work wi t h i n cod ons or it may
ch ange bi t s of d if f erent cod ons at t h e s ame t i me. A codon -limited
mu t at i on corres p ond s t o exp l oring f ew d imens ions in t h e s ame s u b-
s p ace, wh il e a codon -un limited mu t at i on may exp l ore t h e s earch s p ace
in many d imens ions . Th es e mu t at i on op erat ors d o not p rod u ce v as t
ch anges in t h e genot yp e becau s e t h ey d o not rep l ace comp l et e s ynt ac-
tic u ni t s , as t h ey wou l d in tree-bas ed GP. Th u s , t h i s t yp e of mu t at i on
s eems cl os er t o nat u r al mu t at i on. Crossover is i mp l ement ed in d ev e-
l op ment al genetic p rogrammi ng by a s t and ar d GA op erat or l ike one-
EI
9 Di ffe r e n t Var iet ies of Genet ic Pr og r a mmi n g
or two-p oint cros s ov er. I n p art i cu l ar, s wap p ed s u bs equ ences may be
of d if f erent l ength , t h u s p rod u ci ng of f s p ring wi t h d if f erent l ength .
Fi gu re 9.12 ou tl ines t h e central p iece of t h e DGP al gori t h m. A d -
d ition of a genot yp e- p h enot yp e map p i ng s t ep cou l d be cons id ered f or
any GP al gori t h m. Th e genot yp e- p h enot yp e map p i ng mu s t al ways
h ap p en p rior t o f itnes s ev al u ation.
Figure 9.12
The central piece of the
DGP algorithm, the
genotype-phenotype
mapping
[Genotype J -
S earch S p ace
(u ncons trained )
Genotyp e -Ph enotyp e
Map p ing (GPM)
C ons traint imp l ementation
[Ph enotyp e J
S ol u tion s p ace
(cons trained )
Major DGP Parameters
Sample Problem
Protected Functions
9.2.3 An Example: Evolution in C
DGP can be u s ed f or t h e ev ol u tion of a p r ogr am in an ar bi t r ar y
LA LR( l ) t arget l angu age. A s s u me DGP h as been ev ol v ing FO R-
TRA N p rograms f or s ome p robl em, and now we want it t o p rod u ce
C p rograms . I n p rincip l e, f ou r s ys t em p ar amet er s mu s t be ch anged .
Fi rs t , we exch ange t h e FO RTRA N p ars er f or a C p ars er. S econd , we
s u bs t i t u t e th os e t arget s ymbol s in t h e genetic cod e t h at are s p ecif ic
of FO RTRA N by t h e s emantical l y corres p ond i ng C s ymbol s . Th i r d ,
t h e ed iting p h as e mu s t s u p p l y C -s p ecif ic p h enot yp e p ar t s , l ike C -s tyl e
f u nction h ead ers . Fou rt h , any commercial l y av ail abl e C comp il er wil l
be cal l ed p rior t o f itnes s ev al u ation. DGP wil l now h ap p i l y ev ol v e C
p rograms f or t h e giv en p robl em.
Let u s cons id er an examp l e f or t h e ev ol u tion of C p rograms al ong
t h e l ines of [Kel l er and Banzh af , 1996]. S ince C is t h e ch os en t ar get
l angu age, each p h enot yp e wil l be a s ymbol s equ ence obeying C s yn-
t ax. Th e tes t p robl em is a s ymbol ic f u nction regres s ion on a f ou r-
d imens ional p ar amet er s p ace. Th e f u nction we wou l d l ike t o mod el
is
/ = s i n(m) cos (z;) -== + t an( a) (9-1)
A l l p ar amet er v al u es s h al l be real -v al u ed . Th e d omai n of t h e tes t
p robl em s u gges ts v ariabl es , u nary and bi nary ari t h met i c f u nctions ,
and p arent h es i s op erat ors as el ements of t h e t ermi nal and f u nction
s ets . To p rot ect agains t d iv is ion by zero, we u s e a d iv is ion f u nction
D t h at r et u r ns t h e recip rocal v al u e of its s ingl e argu ment . I f t h e
argu ment equ al s zero, t h e f u nction r et u r ns 1. We s u p p l y a p rot ect ed
s qu are root f u nction sqrt t h at r et u r ns t h e s qu are root of t h e abs ol u t e
9.2 GP wi t h Linear Genomes MJ33
v al u e of its argu ment . Fu rt h ermore, an ov erf l ow-p rotected exp onen-
t i al f u nction exp(x) is p rov id ed t h at normal l y r et u r ns e
x
, bu t in cas e
t h e v al u e of x cau s es an ov erf l ow, ret u rns 1.
Th e cod e s h own in Tabl e 9.5 is u s ed .
Binary code
0000
0001
0010
0011
0100
0101
0110
0111
1000
1001
1010
1011
1100
1101
1110
1111
Token
+
*
*
D
m
V
q
a
(
)
sin
cos
tan
sqrt
exp
)
Abbr. token
+
*
*
D
m
V
q
a
(
)
S
c
T
R
E
)
Th e cod ons get map p ed into a s et of 16 s ymbol s , f eatu ring 14
d if f erent s ymbol s of v ariabl es and op erat i ons . Th i s genetic cod e is re-
d u nd ant wi t h res p ect t o t h e mu l t i p l i cat i on and t h e cl os ing-p arenth es is
op erat or. Th i s migh t h av e p os itiv e and negativ e ef f ects on conv er-
gence. For i ns t ance, t h e red u nd ancy of t h e mu l t i p l i cat i on op era-
tor cou l d res u l t in p h enot yp es t h at cons is t of many s u ch op erat ors .
Th i s can be ad v ant ageou s s ince t h e p robl em f u nction f eatu res two
s u ch op erat ors . O n t h e ot h er h and , t h e red u nd ancy concerning t h e
cl os ing-p arenth es is op erat or cou l d p os e a h and i cap t o ev ol u tion, s ince
it enl arges t h e p robabi l i t y t h at a need ed l ong s u bexp res s ion nev er
emerges .
Th e genot yp e l engt h is f ixed at 25 cod ons ; t h at is , each genot yp e
cons is ts of 25 cod ons . S ince t h ere are 16 d if f erent cod ons in t h e
genetic cod e, t h e s earch s p ace contains 16
25
or ap p roxi mat el y 1.3E 30
genotyp es . Wh en u s ing t h e u nres t ri ct ed mu t at i on op erat or d es cribed
abov e, DGP f aces 25 4 = 100 d egrees of f reed om, s ince each cod on
cons is ts of 4 bits . I n oth er word s , in ad d i t i on t o t h e rel ativ el y l arge
s ize of t h e s earch s p ace, t h i s s p ace is h igh -d imens ional , wi t h 100
d imens ions .
Table 9.5
Genetic code of the
example function
regression problem,
including one-character
abbreviations
im.<
9 Di fferent Varieties of Genetic Programmi ng
S omet i mes t h e act u al l ength of p h enot yp es af ter rep air can s u r-
p as s 25 t arget s ymbol s . I magi ne, f or i ns t ance, t h e - i mp robabl e -
cas e of a p h enot yp e l ike
D(D(D(D(D(D(D(D(D(D(D(D(D ( a ) ) ) ) ) ) ) ) ) ) ) ) )
Pri or t o t h e s p ace ch aract er wi t h i n t h e s ymbol s equ ence, t h ere are 25
s ymbol s . S h ort es t p os s ibl e t ermi nat i on of t h e p h enot yp e s til l requ ires
ap p end i ng 15 more s ymbol s , mos t of t h em being ) t o cl os e op en
p arent h es i s l ev el s .
Du e t o t h e real -v al u ed f ou r-d imens ional p ar amet er s p ace, a f itnes s
cas e cons is ts of f ou r real i np u t v al u es and one real ou t p u t v al u e.
We s u p p l y a s et of f itnes s cas es wi t h rand oml y ch os en i np u t v al u es .
A l t h ou gh t h e p robl em is s ignif icantl y h ard er t h an many regres s ion
p robl ems u s ed t o tes t GP s ys t ems , we increas e t h e d if f icu l ty f u rth er
by p rov id ing onl y t en f itnes s cas es t o t h e s ys t em. Not e t h at GP
s ys tems wil l t ake ad v ant age of t h i s s i t u at i on and d ev el op a s imp l er
mod el of t h e d at a t h an wou l d h av e ev ol v ed wi t h a l arge nu mber of
f itnes s cas es .
A n Example Result Ru ns l as ted f or 50 generations at mos t , wi t h a p op u l at i on s ize of
500 ind iv id u al s . I n one exp eri ment al ru n, t h e genot yp e
1100 0010 1000 0111 1001 0010 1101 1001 0111 1110
0000 1011 1001 1110 1001 1010 1101 0011 1100 1111
0101 1010 0110 1110 0001
ev ol v ed . Wh a t mu s t h ap p en t o t h i s genot yp e in ord er t o ev al u at e t h e
f itnes s of t h e corres p ond i ng ind iv id u al ? Trans cri p t i on d eriv es f rom it
t h e raw s ymbol s equ ence (u s ing t h e one-l etter abbrev i at i ons )
T*(a)*R)aE+C)E)SRDT)vSqE*
Rep ai ri ng trans f orms th is il l egal s equ ence into
{T((a)*R(a+m))+(S (D((v +q+D>
S ince t h i s s equ ence is u nf inis h ed , rep ai ri ng t er mi nat es by com-
p l eting t h e s equ ence into .._ , .,.
{T( ( a) *R( a+m) ) +( S ( D( ( v +q+D( m) ) ) ) ) >
Final l y, ed i t i ng p rod u ces
d ou bl e i nd ( d ou bl e m, d ou bl e v , d ou bl e q, d ou bl e a)
{ r e t u r n T( ( a) *R( a+m) ) +( S ( D( ( v +q+D( m) ) ) ) ) ; }
9.2 GP wi t h Linear Genomes
A C comp il er takes ov er to generate an execu tabl e th at is v al id on th e
u nd erl ying h ard ware p l atf orm. Th is execu tabl e is th e f inal p h enotyp e
encod ed by th e genotyp e. A s a f ormu l a th is read s
tan(a * \Ja + m) + s in( =-) (9-2)
Th is p h enotyp e f eatu red a normal ized l eas t-s qu are error f itnes s of
0.99 (with 1.0 as p erf ect f itnes s ), wh ich is qu ite accep tabl e, cons id er-
ing th e s ize of th e s earch s p ace and th e u s e of mu tation as th e onl y
s earch op erator bes id es creation.
A s a s id e ef f ect, th is examp l e s h ows th at GP can be u s ed to
f ind "s imp l er good mod el s " (i.e., s ol u tions ) f or a "real ity" (i.e., a
p robl em) d es cribed by f itnes s cas es . Wh il e th e p erf ect s ol u tion is
an exp res s ion th at u s es th e cos ine and th e exp onential f u nction, th e
al mos t p erf ect s ol u tion abov e d oes with ou t th es e f u nctions . Th is
inh erent p otential of GP can be ap p l ied to p robl ems wh ere a certain
d egree of comp romis e between qu al ity and comp l exity is accep tabl e.
9.2.4 Machine Language
C ommercial comp u ters are - at a l ow l ev el of abs traction - regis -
ter mach ines . A regis ter mach ine execu tes a p rogram by read ing
th e nu mbers in its memory cel l s and interp reting th em as op erations
between memory and regis ters . Th e regis ters f orm a s mal l s et of
memory cel l s in tern al to th e p roces s or. A typ ical mach ine cod e in-
s tru ction may l ook l ike x=y+z, wh ich s h ou l d be interp reted as "ad d
th e content of regis ter y to th e content of regis ter z and s tore th e re-
s u l t in regis ter a;." Th e ins tru ctions cou l d al s o acces s and manip u l ate
th e RA M memory. Th e ins tru ctions x=memory c e l l [y] wil l inter-
p ret th e content of regis ter y as an ad d res s p ointing to a memory cel l
wh os e v al u e s h ou l d be mov ed into regis ter x. I ns tru ctions th at real ize
ju mp s and comp aris ons enabl e th e creation of cond itional branch es
and l oop s .
A s imp l e f ou r-l ine p rogram in mach ine l angu age migh t l ook l ike
th is :
1: x=x-l
2: y=x*x
3: x=x*y
4: y=x+y
Th is p rogram u s es two regis ters , x, y, to rep res ent a f u nction, in
th is cas e th e p ol ynomial f(x) = (x l )
2
+ (x l )
3
. Th e inp u t f or
th e f u nction is p l aced in regis ter x and th e ou tp u t is wh at is l ef t in
regis ter y wh en al l (f ou r) ins tru ctions h av e been execu ted . Regis ter
EEEM 9 Di ffe r e n t Var iet ies of Genet ic Pr og r a mmi n g
Figure 9.13
The dataflow graph of
the (x- l )
2
+ ( x - l )
3
polynomial
-1
rr
i l
rr
y is initial l y zero. Not e t h at regis ters are v ariabl es wh ich cou l d be
as s igned at any p oint in t h e p rogram. Regis ter y, f or i ns t ance, is
u s ed as t emp or ar y s torage in i ns t ru ct i on 2, bef ore its f inal v al u e is
as s igned in t h e l as t i ns t ru ct i on. Th e p rogram h as more of a grap h
t h an a t ree s t ru ct u re, wh ere t h e regis ter as s i gnment s rep res ent ed ges
in t h e grap h . Fi gu re 9.13 s h ows t h e d ataf l ow grap h of t h e f u nction
comp u t at i on f or (x l )
2
+ (x l )
3
. We can s ee t h at t h e mach i ne cod e
p rogram corres p ond s t o t h i s grap h v ery cl os el y. C omp ar e t h i s t o an
equ iv al ent ind iv id u al in a tree-bas ed GP s ys t em s u ch as in Fi gu re
9.14.
Figure 9.14
The representation of
{x - l )
2
+ {x- l )
3
in a
tree-based genome
9.2 GP wi t h Linear Genomes
A d is ad v antage of th e more comp act regis ter mach ine rep res enta-
tion migh t be th at it may be more brittl e becau s e of th e d ep end encies
between regis ters . O n th e oth er h and , temp orary s torage of v al u es in
regis ters can be s een as a s imp l e s u bs titu te f or au tomatical l y d ef ined
f u nctions (s ee S ection 10.1), s ince th e reu s e of cal cu l ated v al u es cou l d
u nd er certain cond itions rep l ace th e need to d iv id e th e p rograms into
f u nctions [Nord in, 1994].
Mach ine cod e p rogramming is of ten u s ed wh en th ere is a need f or
v ery ef f icient s ol u tions - with ap p l ications h av ing h ard cons traints on
execu tion time or memory u s age. I n general , th e reas ons f or u s ing
mach ine cod e in GP - as op p os ed to h igh er-l ev el l angu ages - are
s imil ar to th os e f or p rogramming in mach ine cod e by h and :
Th e mos t ef f icient op timization can be d one at th e mach ine
cod e l ev el . Th is is th e l owes t l ev el of a p rogram and is al s o
wh ere th e bigges t gains are p os s ibl e. O p timization cou l d aim
at s p eed or memory s p ace or both . For ins tance, GP cou l d be
u s ed to ev ol v e s h ort mach ine cod e s u brou tines with comp l ex
d ep end encies between regis ters and memory.
A noth er reas on f or u s ing mach ine l angu age is th at h igh -l ev el
tool s migh t s imp l y not be av ail abl e f or a target p roces s or. Th is
is of ten th e cas e f or s p ecial -p u rp os e p roces s ors in embed d ed
control ap p l ications .
Mach ine cod e is of ten cons id ered h ard to l earn, p rogram, and
mas ter. A l th ou gh th is is a matter of tas te, s ometimes it cou l d
be more conv enient to l et th e comp u ter ev ol v e s mal l p ieces of
mach ine cod e p rograms its el f rath er th an l earning to mas ter
mach ine cod e p rogramming.
A l th ou gh it is p os s ibl e to ev ol v e mach ine cod e with a tree-bas ed
s ys tem (by bu il d ing trees of mach ine ins tru ctions ), th ere are ad d i-
tional reas ons f or u s ing binary mach ine cod e d irectl y:
Th e GP al gorith m can be mad e v ery f as t by h av ing th e ind iv id -
u al p rograms in th e p op u l ation in bin ary machin e code. Th is
meth od el iminates th e interp reter in th e ev al u ation of ind iv id u -
al s . I ns tead , ev al u ation requ ires giv ing control of th e p roces s or
to th e mach ine cod e cons titu ting th e ind iv id u al . Th is accel er-
ates GP arou nd 60 times comp ared to a f as t interp reting s ys tem
[Nord in and Banzh af , 1995b]. A s a res u l t, th is meth od becomes
th e f as tes t ap p roach to GP.
Th e s ys tem is al s o mu ch more memory ef f icient th an a tree-
bas ed GP s ys tem. Th e s mal l s ys tem s ize is p artl y d u e to th e
9 Di fferent Varieties of Genetic Programmi ng
f act t h at t h e d ef inition of t h e l angu age u s ed is s u p p l ied by t h e
CPU d es igner in h ard ware - t h ere is no need t o d ef ine t h e
l angu age and its i nt erp ret at i on in t h e s ys t em. Low memory
cons u mp t i on is al s o d u e t o t h e l arge amou nt of work exp end ed
by C PU manu f act u rers t o ens u re t h at mach i ne i ns t ru ct i on s ets
are ef f icient and comp act . Final l y, mani p u l at i on of ind iv id u al s
as a l inear array of integers is more memory ef f icient t h an u s ing
s ymbol ic tree s t ru ct u res .
A n ad d i t i onal ad v ant age is t h at memory cons u mp t i on is s ta-
bl e d u ri ng ev ol u tion wi t h no need f or garbage col l ection. Th i s
cons t i t u t es an i mp or t ant p rop ert y in real -time ap p l i cat i ons .
I n t h e res t of t h i s s ection we wil l t ake a l ook at t h e met h od s u s ed
t o real ize mach i ne cod e GP s ys t ems .
Evol vi ng Mac hi ne Co de wi t h an I nt erpret i ng Sy s t e m
Th e mos t s traigh tf orward ap p roach t o GP wi t h mach i ne cod e wou l d
be t o d ef ine a f u nction and t ermi nal s et s u i t abl e f or a mach i ne cod e
v ari ant . Th e t ermi nal s et wou l d be t h e regis ters and t h e cons t ant s
while the function s et would be t h e op erat ors u s ed . Th e p robl em wi t h
s u ch an ap p roach is t h at one cannot cros s ov er arbi t rary s u bt rees with -
ou t v iol ating t h e s ynt ax of t h e mach i ne l angu age u s ed . A s ol u tion
is t o h av e a s trongl y t yp ed GP s ys t em wh ere one can onl y cros s ov er
s u bt rees of t h e s ame t yp e [Montana, 1994]. I n s trongl y t yp ed GP
( S TGP) one cannot cros s ov er a s u bt ree ret u rni ng a Bool ean wi t h a
s u bt ree ret u rni ng a f l oat, t o giv e one examp l e. I n a s imil ar way, we
wou l d not cros s ov er nod es t h at are regis ters wi t h nod es t h at are op -
erat ors . Fi gu re 9.15 il l u s trates h ow t h e s mal l mach i ne cod e s egment
rep res ent at i on bel ow cou l d be rep res ent ed in a s trongl y t yp ed t ree
s t ru ct u re:
1: x=x-l * " "'"''"' ' " '
:
'
2 :
y
= x
*
x
. . : ! v w, i , .
l
, i i ;
i
, . . : |
1
l ' A, s V
;
! ;
,
- . ' l f -
3: x=x* y .: .. ,
v
; ,,[ ; ,,..... .,.,;r .; .'*. .,. ; . . -, i -, ;
i :
-
r !
4: y=x+y
Th ere are t h ree d if f erent t yp es of nod es in t h i s f igu re. Termi nal
nod es rep res ent cons t ant s or regis ter v al u es . O p er at or nod es cal cu l ate
v al u es f rom two of t h ei r op erand s and s tore t h e res u l t in t h e regis ter
s p ecif ied by t h ei r f irs t op erand . Th e op erand s are tied t oget h er wi t h
I nod es wh ich d o not rep res ent a cal cu l ation bu t i ns t ead are u s ed t o
giv e t h e op erand nod es a d ef ined execu tion ord er. I n ou r examp l e we
execu te t h e op erand nod es in d ep th -f irs t ord er.
9.2 GP wi t h Linear Genomes
EH
IjjL Figure 9.15
^ ^ ^^ Representation of
C\\ T O machine code language
s' ^\ / \ \ individual in a tree
r~~\^ ^^Y~\ f\ f\ r~\ structure
( I ) r ) (y ) l ) l y )
(- 7 (") (v ) (x) ( y )
O l O ( O [ y ) v O \ O
S t rongl y t yp ed GP is s imil ar t o grammar-res t ri ct ed GP, wh ich
u s es a gr ammar of t h e l angu age t o res trict, e.g., cros s ov er
[Wh igh am, 1995a]. Th i s way it is al s o p os s ibl e t o gu arant ee correct
op erat i on of GP op erat ors on ind iv id u al s . Th i s met h od is al s o wel l
s u ited f or ev ol u tion of mach i ne cod e. Th er e are al s o ot h er met h od s
f or structure preservin g crossover wh ich migh t be u s ed [Koza, 1992d ].
Th es e tree-bas ed GP met h od s f or ev ol u tion of mach i ne l angu age
mi gh t s eem s l igh tl y f orced . Mos t res earch ers h av e u s ed a cros s ov er
met h od , i ns t ead , wh ich is s imil ar t o GA cros s ov er d u e t o t h e l in-
ear s t r u ct u r e of mach i ne cod e p rograms . Th i s cros s ov er op erat or
exch anges p ieces of mach i ne cod e in a l inear rep res ent at i on.
T h e J B La n g u a g e
O ne of t h e earl ies t ap p roach es t o ev ol u tion of comp u t er p rograms
s imil ar t o mach i ne cod e is t h e J B l angu age [C ramer, 1985]. C r amer
f ormu l ated h is met h od as a general ap p roach t o ev ol v e p rograms ,
bu t h is regis ter mach i ne l angu age is in many ways s imil ar t o a s imp l e
mach i ne cod e l angu age and wil l t h u s s erv e as a good i l l u s t rat i on
f or regis ter mach i ne GP. He u s es a s t ri ng of d igits as t h e genome.
Th r ee cons ecu tiv e d igits rep res ent an i ns t ru ct i on. Th e f irs t integer
in t h e t ri p l e d et ermi nes t h e t yp e of i ns t ru ct i on. Th i s is s imil ar t o t h e
s ynt ax of a mach i ne cod e i ns t ru ct i on wh ich h as s p ecif ic bit f iel d s t o
d et ermi ne t h e t yp e of i ns t ru ct i on. Th ere are f iv e d if f erent i ns t ru ct i ons
or s t at ement s in J B. INCREMENT ad d s one t o a s p ecif ied regis ter. Th e
regis ter nu mber is giv en by t h e s econd d igit of t h e trip l e. ZERO cl ears
a regis ter wh il e S E T as s igns a v al u e t o a regis ter. Th ere are al s o
BLOCK and LO O P i ns t ru ct i ons t h at grou p i ns t ru ct i ons t oget h er and
enabl e wh i l e - d o l oop s . Fi gu re 9.16 s h ows a v ery s h ort J B examp l e.
Nei t h er INCREMENT nor CLEAR u s es t h e l as t d igit of its trip l e. J B
WMM 9 Different Varieties of Genetic Programming
Figure 9.16
Program representation
in JB
0 = BLOCK (group statements)
1= LOOP
2 = SET
3 = ZERO (clear)
4 = INCREMENT
Individual genome:
0 0 1 3 1 Hi 2 1 4 1 X
block stat. 1 stat.2
registers = 0
repeat stat.1, register2
registeri = registerl +1
emp l oys a v ariabl e-l ength s t ri ng cros s ov er. I n p ar t t o av oid inf inite
l oop s , C ramer l ater aband oned t h i s met h od in f av or of an ap p roach
u s ing a tree-bas ed genome.
The GEMS Sy s t e m
O ne of t h e mos t extens iv e s ys t ems f or ev ol u tion of mach i ne cod e is
t h e GE MS s ys t em [C rep eau , 1995]. Th e s ys t em incl u d es an al mos t
comp l et e i nt erp ret er f or t h e Z-80 8-bit microp roces s or. Th e Z-80 h as
691 d if f erent i ns t ru ct i ons , and GE MS i mp l ement s 660 i ns t ru ct i ons ,
excl u d ing onl y s p ecial i ns t ru ct i ons f or i nt erru p t h and l i ng and s o on.
I t h as s o f ar been u s ed t o ev ol v e a "h el l o worl d " p rogram cons is ting of
58 i ns t ru ct i ons . E ach i ns t ru ct i on is v iewed as at omi c and ind iv is ibl e,
h ence cros s ov er p oi nt s al ways f al l between t h e i ns t ru ct i ons in a l inear
s t ri ng rep res ent at i on. Fi gu re 9.17 i l l u s t rat es t h e cros s ov er met h od
u s ed in GE MS , wh ere new of f s p ring are creat ed by exch anging a
bl ock of i ns t ru ct i ons bet ween two f it p arent s .
9. 2. 5 An Exampl e: Evol ut ion in Machine Language
A typ ical ap p l i cat i on of GP is s ymbol ic regres s ion. S ymbol ic regres -
s ion is t h e p roced u re of ind u cing a s ymbol ic equ at i on, f u nction, or
p rogram t h at f its giv en nu merical d at a. A GP s ys t em p erf orming
s ymbol ic regres s ion t akes a nu mber of nu merical i np u t / ou t p u t rel a-
tions , cal l ed f itnes s cas es , and p rod u ces a f u nction or p r ogr am t h at
is cons is tent wi t h th es e f itnes s cas es . C ons id er, f or examp l e, t h e f ol -
l owing f itnes s cas es :
f ( 2) = 2
f ( 4) = 36
f ( 5) = 80
f ( 7) =2 5 2 ,. . .
9.2 GP wi t h Linear Genomes MJifci
Parents
Figure 9.17
Lesser fit parent ^-^ Better fit parent The crossover of GEMS
O ne of t h e inf inite nu mber of p erf ect s ol u tions wou l d be f(x)
(x l )
2
+ (x l )
3
. Th e f itnes s f u nction wou l d , f or i ns t ance, be
t h e s u m of t h e d if f erence between an ind iv id u al ' s (f u nction' s ) act u al
ou t p u t and t h e t arget ou t p u t s p ecif ied by a f itnes s cas e. I f a mat ch i ng
f ormu l a is f ou nd by t h e GP s ys t em it can be u s ed t o p red ict t h e v al u es
between or ou ts id e t h e giv en range of p oi nt s .
Th e f irs t is s u e we need t o d ecid e is wh ich i ns t ru ct i ons f rom ma-
ch ine l angu age we wou l d l ike t o incl u d e in t h e f u nction s et. Wh en
ev ol v ing a p r ogr am in mach i ne l angu age, we s h ou l d al ways s p end
s ome t i me as s u ring t h at t h e rep res ent at i on of t h e p robl em and t h e
f itnes s cas es are wel l s u ited f or t h e av ail abl e mach i ne cod e i ns t ru c-
t i ons . S omet i mes it is ad v ant ageou s t o map t h e f itnes s cas es t o an-
ot h er rep res ent at i on wh ich bet t er corres p ond s t o p rimitiv es of t h e
l angu age. By i nt rod u ci ng a CALL i ns t ru ct i on, one can u s e any s ort
of u s er-d ef ined f u nction ev en wh en working wi t h mach ine cod e ev o-
l u tion. Howev er, t h e p ower of mach i ne cod e GP is exp l oited t o t h e
h igh es t d egree onl y wh en nat i v e mach i ne cod e i ns t ru ct i ons are u s ed
f or cal cu l ation. I n ou r s ymbol ic regres s ion p robl em, we ch oos e t h ree
ari t h met i c i ns t ru ct i ons f or t h e f u nction s et +, , x.
We mu s t al s o d ecid e on t h e nu mber of regis ters an ind iv id u al h as
acces s t o. Hard ware u s u al l y p rov id es an u p p er l imit on t h e nu mber
of regis ters acces s ibl e. Th i s l imit is between 2 and 64 regis ters , d e-
p end i ng on t h e p roces s or t yp e and t h e p rogrammi ng env i ronment . I f
EU
9 Di fferent Varieties of Genetic Programmi ng
t h ere are not enou gh regis ters av ail abl e f or t h e ap p l i cat i on, one h as
t o incl u d e i ns t ru ct i ons f or s tack mani p u l at i on. I n ou r cas e, we can
as s u me t h at two regis ters (x,y) wil l be enou gh .
A f ter t h e nu mber of regis ters , t h e t yp e of t h e regis ters h as t o be
f ixed . Th r ee t yp es exis t: i np u t regis ters , cal cu l ation regis ters , and
ou t p u t regis ters .
5
Th e i np u t v al u e t o t h e f u nction is as s igned t o t h e
x regis ter wh il e t h e y regis ter is cl eared .
I f t h e mach i ne cod e i ns t ru ct i on f ormat al l ows f or cons t ant s ins id e
t h e i ns t ru ct i ons , t h en we al s o need t o giv e an initial ization range f or
t h es e i ns t ru ct i ons . Th e initial ization range can be s mal l er t h an t h e
maxi mal nu mber exp ect ed in t h e f ormu l a becau s e t h e s ys t em can
bu il d arbi t rary cons t ant s by combining t h em.
Th e u s u al p ar amet er s f or GP ru ns , l ike p op u l at i on s ize and cros s -
ov er or mu t at i on p robabil ities , h av e t o be f ixed as wel l . Th e p op u -
l ation is initial ized as r and om p rograms with r and om l ength . Th e
maxi mu m l ength of p rograms d u ri ng initial ization is anot h er p aram-
eter of t h e s ys tem. I n ou r examp l e, two av erage ind iv id u al s are t h e
p arent s in Fi gu re 9.18. Th e f igu re s h ows a p os s ibl e cros s ov er ev ent
bet ween t h e p arent s . I n t h i s i ns t ance, a p erf ect ind iv id u al is f ou nd
t h at s atis f ies al l t h e f itnes s cas es and h as a f itnes s 0.
Parents
Figure 9.18
Example crossover with
fitness of parents and
offspring
Dad: equivalent
(x-x-ii) Worn: equivalent
Vl yt of (x)=x- i
I Fitness 358
Children
(x=y rj Offspring # 1: equivalent
to f(x)=x
Fitness 352
Offspring #2: equivalent
tof(x)=(x-1)'+(x-lf
Fitness 0 (perfect)
< 4
. swm. vM
5
S ometimes , s p ecif ic s tate regis ters need to be u s ed . Here th is is not
th e cas e and we d ef er a d is cu s s ion of th os e to C h ap ter 11.
9.3 GP wi t h Graph Genomes
9.3 GP wi t h Graph Genomes
Grap h s are anot h er i mp or t ant s t ru ct u re on wh ich GP h as been ap -
p l ied . I n t h i s s ection we s h al l d is cu s s two examp l es , t h e PA DO s ys t em
of Tel l er and Vel os o [Tel l er and Vel os o, 1995b], and t h e d ev el op men-
t al s ys t em of Gr u au [Gru au , 1992b].
9.3.1 PADO
Th e grap h -bas ed GP s ys t em PA DO (Paral l el A l gori t h m Dis cov ery
and O rch es t rat i on) emp l oys s ev eral d if f erent innov ativ e id eas . Th e
top ic we d is cu s s in t h i s s ection is t h at PA DO works not wi t h S -
exp res s ions bu t wi t h p rograms . Tel l er and Vel os o s ay t h ey p ref er t h i s
way t o ev ol v e a s u p ers et of th os e el ements of t rad i t i onal h ierarch ical
GP f u nctions .
Th e p rograms of PA DO are regard ed as N nod es in a d i rect ed
grap h , wi t h as many as N arcs going ou t f rom each nod e. E ach nod e
cons is ts of an action p ar t and a branch -d ecis ion p ar t . Fi gu re 9.19
s h ows a p rogram, a s u bp rogram, and t h e memory organi zat i on f or
each nod e.
E ach p r ogr am h as a s tack and an ind exed memory f or its own
u s e of i nt ermed i at e v al u es and f or commu ni cat i on. Th ere are al s o
t h e f ol l owing s p ecial nod es in a p rogram:
S t ar t nod e
S t op nod e
S u bp rogram cal l ing nod es
Li brary s u bp rogram cal l ing nod es
Th er e are al s o p ar amet er s s t at i ng, f or examp l e, t h e mi ni mu m
and maxi mu m t i me f or a p rogram t o ru n. I f a p art i cu l ar p r ogr am
s t op s earl ier, it is s imp l y res t art ed f rom t h e s t ar t nod e, wi t h v al u es
accu mu l at ed in s tack or memory reu s ed . Li brary s u bp rograms are
av ail abl e t o al l nod es , not j u s t t h e one wh ich is cal l ing, wh ereas s u b-
p rograms wi t h ou t t h at p rov is ion are f or a p rogram' s "p riv ate" u s e
onl y.
A p op u l at i on of t h es e p rograms comp et es f or p erf ormance on s ig-
nal cl as s if ication t as ks . I n f act, no one p rogram becomes res p ons ibl e
f or a d ecis ion; i ns t ead , a nu mber of p rograms are "orch es t rat ed " t o
p erf orm t h e t as k. Tel l er cl aims t h at t h e s ys t em is abl e t o cl as s if y s ig-
nal s bet t er t h u s t h an wi t h LI S P-l ike cons t ru ct s s u ch as S -exp res s ions
and A DFs [Tel l er and Vel os o, 1995a]. I n ad d i t i on, d u e t o t h e s p e-
cial rep res ent at i on of p rograms in d irected grap h s , l oop s are eas il y
i ncorp orat ed .
l&ffl
9 Different Varieties of Genetic Programming
Main Program
Figure 9.19
The representation of a
program and a
subprogram in the PADO
system. Each node is
comprised of: Number,
Action, Branch, Arcl,
Arc2, ..., Branch
Constant.
START
STOP
Stack
Indexed Memory
Subprogram (private or public)
" : 0-K> .! : ,r
;
i.
: I i
S p ecial care h as t o be t aken t o p rov id e good mu t at i on and cros s -
ov er op erat ors f or s u ch a s ys t em. Tel l er and Vel os o u s e a co-ev ol u tion-
ary ap p roach t h ey cal l smart operators [Tel l er, 1996] (s ee C h ap t er 6).
Th er e are more s op h i s t i cat ed breed ing d etail s , wh ich we s h al l omi t
h ere, as wel l as ad d i t i onal ev al u ation p roced u res s p ecif ical l y curtailed
t o f acil itate p at t er n recognition, bu t t h e abov e is t h e gis t of PA DO ' s
grap h rep res ent at i on.
9. 3. 2 Cellular Encoding
A n i nt eres t i ng s ch eme f or a d ev el op ment al ap p roach t oward grap h
ev ol u tion h as been p rop os ed by Gr u au [Gru au , 1992b] [Gru au , 1993]
[Gru au , 1994a]. Gr u au d es igned a rewri t i ng s ys t em t h at can work on
grap h s t ru ct u res as exemp l if ied by neu ral networks , el ectrical circu its ,
or f inite s t at e au t omat a. Becau s e t h e not i on of grap h s is u bi qu i t ou s
9.4 Other Genomes
E3
in comp u t er s cience, t h e ap p l ication area of th is met h od is p ot ent i al l y
l arge.
Th e general id ea is t h at wh at u l t i mat el y s h ou l d res u l t as a p h e-
not yp e is s ep arat ed f rom t h e genot yp e of t h e tree-bas ed ind iv id u al .
Th e p h enot yp e is a (p os s ibl y) cycl ic grap h , s omet h i ng s t ri ct l y f or-
bi d d en in tree s t ru ct u res by th eir v ery d ef inition, wh ich f orces t h e
s ep arat i on between genot yp e and p h enot yp e.
Th e genot yp e is a s o-cal l ed gr ammar t ree, wh ich cont ai ns ru l es Grammar Trees as
f or rewriting, l ike t h e mod el s of Wh i gh am (s ee S ection 9.4.2) or Jacob Gen otype
(s ee S ection 9.4.3). Wh a t is rewri t t en, h owev er, is not a s t ri ng bu t
a grap h , wh os e nod es (cel l s ) or ed ges (connections ) are u nd ergoi ng
rewriting. Th e f ormer is cal l ed d iv is ion by Gr u au , t h e l at t er ch ange
of wei gh t s / l i nks / connect i ons . Th es e op erat i ons are ap p l ied in a p ar-
al l el manner s o t h at gr ammar trees d ev el op ov er t i me l ike L-s ys tems
[Lind enmayer, 1968]. Fi gu re 9.20 s h ows a s el ection of op erat i ons in
t h i s rewri t i ng s ys t em.
A not h er as p ect of Gr u au ' s work in cel l u l ar encod ing is t h e abil ity
t o d ef ine mod u l es once t h at s u bs equ entl y can be ap p l ied in v ariou s
l ocations in t h e gr ammar t ree. We s h al l d is cu s s an examp l e of t h e
d ev el op ment of a neu ral network f or a wal king ins ect-l ike robot in
C h ap t er 12.
9.4 Other Genomes
A weal th of ot h er s t ru ct u res h as been u s ed f or ev ol u tion. Th i s s ection
wil l d is cu s s a f ew of t h em.
9.4.1 STROGANOFF
I ba, S at o, and d eGari s [I ba et al ., 1995b] h av e i nt rod u ced a more
comp l i cat ed s t r u ct u r e into t h e nod es of a tree t h at cou l d rep res ent
a p rogram. Th ey bas e th eir ap p roach on t h e wel l -known Group
Method of Data Han dlin g (GMDH) al gori t h m f or s ys t em id entif i-
cat i on [I v akh nenko, 1971]. I n ord er t o u nd er s t and STructured Rep-
resen tation On Gen etic A lgorithms for NOn lin ear Fun ction Fittin g
(STROGA NOFF) we f irs t h av e t o u nd er s t and GMDH.
S u p p os e we h av e a bl ack box wi t h m i np u t s i,:c2> ,x
m
and
one ou t p u t y; s ee Tabl e 9.6. Th e bl ack box receiv es s ignal s on its
i np u t l ines and res p ond s wi t h a s ignal on its ou t p u t l ine. We can
mod el t h e p roces s by s aying t h at t h e s ys t em comp u t es a f u nction /
f rom its i np u t s :
y = f(xi,x
2
,...,x
m
) (9.3)
trHM 9 Different Varieties of Genetic Programming
Figure 9. 20
Side effects of nodes of
cellular encoded grammar
trees ([Gruau, 1995],
copyright MIT Press,
reproduced with
permission)
1 2 3 4
(a) I nitial grap h (b) S equ ential Div is ion ' S ' (c) Paral l el Div is ion ' P'
(d ) Div is ion "T (e) Div is ion ' A '
(g) Div is ion ' H' (h ) Div is ion ' G'
(f) Div is ion ' A '
(i) Recu rrent Link 'R'
(j) C u t inp u t l ink 'C 3' (k) C h ange I np u t Weigh t 'D 3' (1) C h ange O u tp u t Weigh ts 'K 2'
Unf ortu natel y, we cannot know anyth ing abou t th e s ys tem's internal
working. We can onl y obs erv e th e s ys tem's reactions to a nu mber N
of inp u t s timu l i.
Table 9.6
Input/output behavior of
the black box to be
modeled
# O bs .
1
2
k
N
I np u t
1 1 1 ^ 1 2 -Xlm
X
2
\X
2
2 X
2m
%N1
X
N2 -XNTTI
O u tp u t
2/i
V2
Vk
VN
To tackl e th e p robl em of es timating th e tru e f u nction / with an
ap p roximation / , GMDH now as s u mes th at th e ou tp u t can be con-
s tru cted by u s ing p ol ynomial s of s econd ord er in al l inp u t v ariabl es .
Th u s th e as s u mp tion is th at th e s ys tem h as a binary tree s tru ctu re
9.4 Other Genomes
J}J
of th e kind s h own in Figu re 9.21. I ntermed iate v ariabl es 2j comp u te
(recu rs iv el y) inp u t combinations .
f~\ Figure 9.21
\-\ Group Method of Data
/ \ Handling (GMDH) using
s~V y ^'
n
P
ut
variables xi ... x$
( P2 ) ( P A )
P3
x1 ) ( x2 ) ( x3 ) ( x4 ) ( x5
Th e p ol ynomial s are of s econd ord er in th eir inp u t v ariabl es ,
wh ich by th ems el v es migh t be th e res u l t of oth er s econd -ord er p ol y-
nomial s :
Pj(xi,x
2
) = Zj = a
0
+ aixi + a
2
x
2
+ a^x\ + a^x\ + a
5
xix
2
(9-4)
as s u ming f or th e moment a p ol ynomial in inp u ts xi,x
2
. Giv en th e
obs erv ations of Xi, X2, . . . ,x
m
, y, we can now ad ju s t th e p arameters
ai,a
2
, 0,3,0,4, a
5
by conv entional l eas t mean s qu are al gorith ms . Th e
p arameter f itting aims to minimize th e d if f erence between obs erv ed
ou tp u t yi and ou tp u t jji, i 1. . . m generated by th e p ol ynomial tree
s tru ctu re. Mu l tip l e regres s ion anal ys is may be u s ed , f or ins tance, to
ach iev e th is goal . Now th at th e bes t p arameter s et of al l Pj h as been
f ou nd , it is cons id ered an ind iv id u al of a GP p op u l ation.
Th e S TRO GA NO FF meth od ap p l ies GP cros s ov er and mu ta-
tion to a p op u l ation of th e abov e p ol ynomial nod es . A s ketch of h ow
cros s ov er works is s h own in Figu re 9.22. Note th at a nod e retu rns a
comp l icated f u nction of its inp u ts th at is s u bject to a l ocal s earch p ro-
ces s bef ore being f inal l y f ixed . Th u s , th e f eatu res of th e f u nction s et
are not d etermined f rom th e v ery beginning, excep t f or th eir ov eral l
f orm. I ns tead , a l ocal s earch p roces s th at I ba et al . cal l a "rel abel ing
p roced u re" is u s ed to f ind th e bes t combination of p arameters to f it
th e ou tp u t f u nction, p rov id ed a s tru ctu re is giv en. Th e ov eral l f orm,
on th e oth er h and , is th e s ame f or al l non-terminal nod es .
Th e f itnes s of th e GP al gorith m, now op erating on p ol ynomial
trees as s h own in Figu re 9.23, is not neces s aril y th e d egree of f itting
1MB 9 Different Varieties of Genetic Programming
Figure 9.22
Crossover of trees of
GMDH nodes, 5 variables
xi . . . X5. In offspring
only part of the functions
has to be recomputed for
evaluation: y[,y!i (left
side), y,y'
2
.
th at is u s ed in th e mu l tip l e regres s ion p art. I ns tead , it can u s e oth er
meas u res , s u ch as comp l exity of th e ind iv id u al - I ba et al . u s e th e
minimal d es crip tion l ength (MDL) criterion - or a combination of
f itnes s and comp l exity, to comp are th e qu al ity of s ol u tions .
r
I n S ection 12.2 we wil l s ee an ap p l ication examp l e of th is meth od .
9.4.2 GP Using Context-Free Grammars
Wh igh am [Wh igh am, 1995a] [Wh igh am, 1995b] h as introd u ced a v ery
general f orm of grammar-bas ed genetic p rogramming. He u s es context-
f ree grammars as th e s tru ctu re of ev ol u tion in ord er to ov ercome th e
cl os u re requ irements f or GP. By th e u s e of a context-f ree grammar,
typ ing and s yntax are au tomatical l y as s u red th rou gh ou t th e ev ol u -
tionary p roces s , p rov id ed th e genetic op erators f ol l ow a s imp l e ru l e.
9.4 Other Genomes
KII
Figure 9.23
Differen t mutation s of a
tree of GMDH n odes, 5
variables xi .. .x$
I n context-f ree grammar GP, th e central rol e of a f u nction p os -
s es s ing argu ments is taken ov er by a p rod u ction ru l e generating new
s ymbol s . A context-f ree grammar can be cons id ered a f ou r-tu p l e
(S,Z,,N,P) [Gu s taf s on et al ., 1986], wh ere S U N is th e s et of non-
9 Di fferent Varieties of Genetic Programmi ng
terminal s ymbol s , with S th e s tarting s ymbol , th e s et of terminal
s ymbol s , and P th e s et of p rod u ction ru l es .
Termin al of a Definition 9.2 A terminal of a context-free grammar is a
Con text-Free Grammar symbol for which n o production rule exists in the grammar.
Production Rule Definition 9.3 A production rule is a substitution of the kin d
X - Y where XeNan dYeNUY,.
Th ere migh t be more p rod u ction ru l es ap p l icabl e to a s ymbol X 6 N
th at can be exp res s ed u s ing th e d is ju nction |; f or examp l e, X > Y\z
means th at th e non-terminal s ymbol X can be s u bs titu ted by eith er
th e non-terminal Y or th e terminal z (we ad op t th e conv ention th at
non-terminal s are written with cap ital l etters ).
Wh at h as been a terminal in th e conv entional tree-bas ed ap -
p roach to GP h as become a terminal in context-f ree grammar, too,
bu t, in ad d ition, al l f u nctions of conv entional GP h av e now become
terminal s as wel l . Th u s , a s ort of d ev el op mental p roces s h as been in-
trod u ced into ev ol u tion, with p rod u ction ru l es ap p l ied u ntil al l s ym-
bol s h av e reach ed (f rom l ef t to righ t) terminal ch aracter. A f u nctional
exp res s ion of trad itional GP can th en be read off f rom l ef t to righ t
f ol l owing al l l eav es of th e s tru ctu re.
A s an examp l e, we d is cu s s th e f ol l owing grammar:
/">
V;
S
->
B
B -> +BB\ - BB\ * BB\%BB\T
(9.5)
(9.6)
(9.7)
wh ere S is th e s tart s ymbol , B a binary exp res s ion, T a terminal ,
and x and 1 are v ariabl es and a cons tant. Th e arith metic exp res -
s ion d is cu s s ed earl ier can be cons id ered a p os s ibl e res u l t of rep eated
ap p l ication of th es e p rod u ction ru l es as s h own in Figu re 9.24.
C ros s ov er in context-f ree grammar ens u res s yntactic cl os u re by
s el ecting, in one of th e p arents , a non-terminal nod e of th e tree, and
th en s earch ing, in th e s econd p arent, f or th e s ame non-terminal . I f
th e s ame non-terminal is not f ou nd , th en no cros s ov er op eration can
take p l ace; oth erwis e, cros s ov er is al l owed at p recis el y th is nod e. I t
is eas y to s ee th at d iv ers ity comes in wh en a non-terminal al l ows
more th an one p rod u ction ru l e to be ap p l ied . I n th is way, d if f erences
between two ind iv id u al s can d ev el op in th e f irs t p l ace.
Mu tation inv ol v es s el ecting one non-terminal and ap p l ying ran-
d oml y s el ected p rod u ctions u ntil (at th e l ates t) th e maximal l y al -
l owed d ep th of a tree is reach ed .
9. 4 Ot he r Ge nome s
Figure 9.24
Arithmetic expression of
Figure 9.14 expressed as
a grammatical structure.
S: start symbol, B: binary
expression, T: terminal,
x,l: variables, a constant
B B - B B B B - B B
T T T T T T T T
1 x 1 1 x 1
Wh igh am [Wh igh am, 1995a] h as al s o cons id ered a mod if ication
of th e context-f ree grammar by incorp orating new benef icial p rod u c-
tions into th e grammar at certain s tages of th e ev ol u tionary p roces s
(epochs). Wong and Leu ng introd u ced an ev en more general s ys tem
by u s ing context-s ens itiv e grammars as th e bas is of h is GP s ys tem
[Wong and Leu ng, 1996].
9.4.3 Genetic Programmi ng of L-Systems
Lin den mayer systems (al s o known as L-system [Lind enmayer, 1968]
[Pru s inkiewicz and Lind enmayer, 1990] h av e been introd u ced ind e-
p end entl y into th e area of genetic p rogramming by d if f erent res earch -
ers [Koza, 1993a] [Jacob, 1994] [Hemmi et al ., 1994b]. L-s ys tems were
inv ented f or th e p u rp os e of mod el ing biol ogical s tru ctu re f ormation
and , more s p ecif ical l y, d ev el op mental p roces s es . Th e f eatu re of rewrit-
ing al l non-terminal s in p aral l el is imp ortant in th is res p ect. I t al l ows
v ariou s branch es to d ev el op ind ep end entl y of each oth er, mu ch as a
tru e d ev el op mental p roces s d oes .
L-s ys tems in th eir s imp l es t f orm (O L-s ys tems ) are context-f ree
grammars wh os e p rod u ction ru l es are ap p l ied not s equ ential l y bu t
s imu l taneou s l y to th e growing tree of non-terminal s . A s we h av e s een
in th e p rev iou s s ection, s u ch a tree wil l grow u ntil al l branch es h av e
p rod u ced terminal nod es wh ere no p rod u ction ru l e can be ap p l ied
any more. Th e s itu ation is more comp l icated in context-s ens itiv e
Different L-Systems
WFEM 9 Di ffe r e nt Var iet ies of Ge ne t i c Pr og r a mmi n g
L-s ys tems (I L-s ys tems ), wh ere th e l ef t and righ t contexts of a non-
terminal inf l u ence th e s el ection of th e p rod u ction ru l e to be ap p l ied .
Natu ral l y, if more th an one p rod u ction ru l e is ap p l icabl e to a non-
terminal , a non-d eterminis tic ch oice h as to be taken.
Th e goal of ev ol u tion is to f ind th e L-s ys tem wh os e p rod u ction
ru l es generate an exp res s ion th at is mos t s u itabl e f or th e p u rp os es
env is ioned . Th u s , L-s ys tems are ind iv id u al s th ems el v es . Th ey are
ev al u ated af ter al l non-terminal s h av e been rewritten as terminal s
accord ing to th e grammar. Figu re 9.25 s h ows a typ ical ind iv id u al
wh ere each LRule cons is ts of a non-terminal p red eces s or and a ter-
minal or non-terminal s u cces s or (in th e s imp l es t cas e of O L-s ys tems ).
Figure 9.25
Context-free L-system
individual encoding a
production rule system of
Lindenmayer type
LRulel
OL-System
AxiomA LRules
LRule2 LRule3
pred
succ
pred
succ
pred
succ
' - ' - * ) ;
Note th at ind iv id u al s of th is kind cannot be v aried arbitraril y, bu t
onl y f ol l owing th e "meta-grammar" of h ow L-s ys tems are encod ed .
For ins tance, th e A xiom A branch is n ot al l owed to ch ange into an
LRu l e. Rath er, it can ch ange onl y into a d if f erent axiom, s ay, A xiom
B. Th e s itu ation is v ery s imil ar to th e v ariation of A DF trees in Koza's
treatment [Koza, 1994a]. Th ere, f or examp l e, a res u l t-p rod u cing
branch in one tree can be recombined onl y with th e res u l t-p rod u cing
branch of anoth er tree, not with its f u nction-d ef ining branch .
Jacob [Jacob, 1994] giv es a general treatment of h ow al l owed v ari-
ations may be f il tered ou t of th e total of al l v ariations .
.ivi.ti-j''. -\ in virM--
Exercises
1. Giv e f ou r examp l es of d if f erent mu tation op erators acting on
trees .
2. Giv e f ou r examp l es of d if f erent cros s ov er op erators acting on
trees .
3. Des cribe a l inear GP s ys tem.
4. Des cribe th e S TRO GA NO FF GP s ys tem.
5. Giv e an examp l e of a GP s ys tem th at h as a grap h genome.
6. Des cribe th e genotyp e-p h enotyp e map p ing in th e BGP meth od .
7. Giv e two reas ons wh y it is benef icial to ev ol v e mach ine cod e.
8. Des cribe cel l u l ar encod ing.
9. Wh y is it not p os s ibl e to al l ow u nres tricted cros s ov er in GP
u s ing a context-f ree grammar as genome?
Further Reading
K.E . Kinnear, Jr. (ed .),
A DVA NC E S I N GE NE TI C PRO GRA MMI NG.
MI T Pres s , C ambrid ge, MA , 1994.
J.R. Koza,
GE NE TI C PRO GRA MMI NG.
MI T Pres s , C ambrid ge, MA , 1992.
J.R. Koza et al .,
GE NE TI C PRO GRA MMI NG 1996. PRO C E E DI NGS O F THE FI RS T A N-
NUA L C O NFE RE NC E .
MI T Pres s , C ambrid ge, MA , 1996.
J.P. Ros ea (ed .),
PRO C E E DI NGS O F THE WO RKS HO P O N GE NE TI C PRO GRA MMI NG:
FRO M THE O RY TO RE A L- WO RLD A PPLI C A TI O NS .
Tah oe C ity, C A , 1995. ' -?,
E .S . S iegel and J.R. Koza (ed s .),
WO RKI NG NO TE S FO R THE A A A I S YMPO S I UM
O N GE NE TI C PRO GRA MMI NG.
W
^
A A A I Pres s , 1995. , '
10 Advanced Genetic
Programming
C ontents
10. 1 Improving the Speed of GP 279
10.1.1 Run Termination 279
10.1.2 Parallelization 279
10.1.3 Parallel Fitness Evaluations 280
10.1.4 Machine Code Evolution 280
10.1.5 Stochastic Sampling 280
10.2 Improving the Evolvability of Programs . . . . 282
10.2.1 Modularization 283
10.2.2 Automatically Defined Functions 284
10.2.3 Encapsulation 288
10.2.4 Module Acquisition 289
10.2.5 Adaptive Representation 290
10.2.6 Automatically Defined Macros 291
10.2.7 Modules and Crossover 292
10.2.8 Loops and Recursion 293
10.2.9 Memory Manipulation 294
10.2.10 Strongly Typed Genetic Programming 298
10.3 Improving the Power of GP Search 299
10.3.1 Ontogeny 299
10.3.2 Adaptive Parsimony Pressure 302
10.3.3 Chunking 303
10.3.4 Co-Evolution 303
10.3.5 Hybrid Approaches 305
on 10 Advanced Genetic Programming
Convergence and
Diversity
The Granularity of
Programs
Closure and Typing
Th e bas ic ap p roach t o genetic p rogrammi ng h as many l imita-
t i ons . O v er t i me, GP res earch ers h av e become aware of th os e l imita-
tions and t h ere is wid es p read cons ens u s among t h em t h at d es p ite its
s u cces s es , t h ere is v as t room f or i mp rov ement in t h e GP al gori t h m.
I n th is i nt rod u ct i on we s h al l qu ickl y h igh l igh t t h ree l i mi t at i ons of t h e
bas ic ap p roach t o genetic p rogrammi ng, bef ore we d el v e into a more
d etail ed and s ys t emat i c d is cu s s ion.
O ne of t h e mos t s eriou s p robl ems of s t and ar d GP al gori t h ms
is t h e conv ergence of a p op u l at i on. A n of ten u s ed ru l e s t at es t h at
wh at h as not been ach iev ed in a GP ru n in 50 generations wil l nev er
be ach iev ed . A l t h ou gh t h i s is an inf ormal s t at ement , it p oi nt s t o a
s eriou s weaknes s of t h e p arad i gm: in a p op u l at i on t h at is recombined
rep eated l y, s ooner or l at er u nif ormity wil l d ev el op . Div ers ity wil l be
t h e keyword f or f ind ing remed y t o t h i s s i t u at i on, wh ich can be f ou nd
by p aral l el izing genetic p rogrammi ng u s ing d emes .
A not h er p robl em of GP is its d ep end ence on t h e t ermi nal and
f u nction s et initial l y ch os en f or a cert ai n t as k. I t may wel l be t h at
t h e abs t ract i ons res id ing in t h i s t ermi nal and f u nction s et are t oo
h igh or t oo l ow t o al l ow f or a s ens ibl e ev ol u tion of ind iv id u al s . I f
t h ey are t oo l ow, t h e s ys t em wil l f ind t h e t as k t oo comp l i cat ed t o
s i mu l t aneou s l y mov e in t h e v ariou s d irections neces s ary t o imp rov e
a s ol u tion. Th i s is t h e comp l exity is s u e, wh ich wou l d act u al l y cal l
f or a correl at ed ch ange in ind iv id u al s as cou l d be ach iev ed by u s ing
mod u l es t h at migh t be mod if ied as wh ol es . I f t h e abs t ract i ons are
at t oo h igh a l ev el , t h e t as k cannot be broken d own ap p rop ri at el y
and t h e s ol u tions d ev el op ed wil l al ways be more abs t ract , i.e., more
general , t h an t h e f itnes s cas es wou l d d i ct at e. Th e s ys t em wil l t h u s be
f orced t o ignore p ar t of t h e inf ormation in t h e f itnes s cas es s h own t o
it, wi t h al l t h e negativ e cons equ ences f ol l owing f rom t h at . We s h al l
d is cu s s t h i s top ic in S ection 10.2.1.
A more p ract i cal cons id eration is rel ated t o t h e requ i rement of
cl os u re of genetical l y ev ol v ed p rograms . I f t h e s et of t ermi nal s and
f u nctions were of s u ch a kind t h at not al l f u nctions cou l d bear al l
t ermi nal s as argu ment s , t h e s ys t em wou l d become bri t t l e. Typ i ng
is one of t h e ways ou t of t h i s d i l emma (s ee S ection 10.2.10), wh ere
each nod e carries its t yp e as wel l as t h e t yp es it can cal l , t h u s f orcing
f u nctions cal l ing it t o cas t t h e argu ment into t h e ap p r op r i at e t yp e.
We h av e ment i oned j u s t a f ew examp l es of t h e p ot ent i al f or im-
p rov ement of t h e bas ic al gori t h m of genetic p rogrammi ng. I n C h ap -
t er 6 we al read y d is cu s s ed p ot ent i al i mp rov ement s f or t h e cros s ov er
op erat or. Th i s ch ap t er wil l f ocu s on t h ree p rincip al areas f or im-
p rov ement : . _..
10.1 Improvi ng the Speed of GP
1. I mp rov ing th e s p eed of GP;
2. I mp rov ing th e ev ol v abil ity of p rograms ;
3. I mp rov ing th e p ower of GP s earch .
10.1 Improvi ng the Speed of GP
GP is comp u tational l y intens iv e. Th at aris es f rom th e need to ev al u -
ate each ind iv id u al 's f itnes s ov er many d if f erent f itnes s cas es . Th ere
h av e been a nu mber of d if f erent ap p roach es to accel erating GP ru ns .
10. 1. 1 Run Ter minat ion
O f ten th ere is a need f or exp l oring p arameter ch oices to be s et f or an
entire GP ru n. Th is can be d one s erial l y by ch oos ing d if f erent s ets of
p arameters f or s u bs equ ent ru ns . I n s u ch a s itu ation it is v ery h el p f u l
to h av e v ariou s criteria f or s ignal ing th e end of a ru n. For exam-
p l e, one s u ch s ignal cou l d be th e intron exp l os ion we introd u ced in
C h ap ter 7. Fitnes s imp rov ement is ef f ectiv el y ov er once exp onential
intron growth s ets in. I n th is way, criteria f or earl y ru n termination
can accel erate th e exp l oration of th e p arameter s p ace of GP cons id -
erabl y. I n one s et of exp eriments , wh ere th e maximu m nu mber of
generations was s et to 200, th e earl y termination criterion red u ced
th e ru n time by 50% [Francone et al ., 1996].
10. 1. 2 Paral l el izat ion
A noth er way to accel erate GP and , at th e s ame time to keep d iv er-
s ity h igh , is to u s e p aral l el ization. Paral l el p op u l ations , al s o known
as demes, migh t p os s es s d if f erent p arameter s ettings th at can be ex-
p l ored s imu l taneou s l y, or th ey migh t coop erate with th e s ame s et
of p arameters , bu t each work on d if f erent ind iv id u al s . Paral l el iza-
tion is p os s ibl e f or al l E A s , of cou rs e, d u e to th eir p op u l ation-bas ed
ap p roach .
Parallel Popul ati ons
Koza h as d ev el op ed a s ys tem th at p rov id es f as t p erf ormance on 64
Power PC p roces s ors arranged in a toroid al mes h . Th e h os t in ch arge
of th e entire ru n is a Pentiu m PC . Th is s ys tem is mod el ed as an
is l and GA [A nd re and Koza, 1996a]. Th at is , each p roces s or h as its
own p op u l ation, wh ich is s ep arate f rom th e p op u l ations of th e oth er
p roces s ors . E ach p roces s or s end s a "boatl oad " of "migrants " to th e
f ou r ad jacent p roces s ors on th e toroid in each generation. S o th e
10 Advanced Genetic Programmi ng
is ol ation of t h e ind iv id u al d omes , or p op u l at i ons , is t emp ered by a
weak mi grat i on of ind iv id u al s f rom p roces s or t o p roces s or.
A typ ical i mp l ement at i on of t h i s s ys t em wou l d inv ol v e 64 d emes
of p op u l at i on 800 each . Th e t ot al p op u l at i on ov er al l d emes wou l d
be 51200 [Koza et al ., 1996b]. O f cou rs e, t h e p aral l el ization of t h e
s ys t em res u l ts in a great s p eed -u p in p roces s ing s u ch a l arge p op u l a-
tion. Koza and A nd re h av e rep ort ed intrigu ing res u l ts of a more t h an
l inear s p eed -u p d u e t o t h i s arrangement . I t is p os s ibl e t h at a l arger
p op u l at i on al l ows t h e s ys t em t o f ind s ol u tions wi t h f ewer ev al u ations
[Keith and Mart i n, 1994].
10. 1. 3 Parallel Fitness Eval uat ions
A not h er way t o p aral l el ize a GP s ys t em is t o ev al u at e p rograms in
p aral l el . I n [Ju il l e and Pol l ack, 1996] a s ys t em is rep ort ed t h at u s es
t h e 4096 p roces s ors of a Mas Par MP-2 p aral l el comp u t er (S I MD)
t o i mp l ement p aral l el ev al u ation of trees . Th e mach i ne in qu es tion
h as a p eak p erf ormance of 17 GI PS . Th e id ea of Ju il l e and Pol l ack
was t o i mp l ement a v i rt u al p roces s or wi t h its own s p ecif ic memory
organi zat i on in ord er t o s imu l taneou s l y execu te a p op u l at i on of p ro-
grams on t h i s S I MD arch i t ect u re. Dep end i ng on t h e s p ecif ic p robl em
t h ey u s ed (t ri gonomet ri c id entities and s ymbol ic i nt egrat i on), ap -
p roxi mat el y 1000 S -exp res s ions cou l d be ev al u at ed p er s econd . For
two ot h er p robl ems (tic-tac-toe and t h e s p iral p robl em) t h e au t h or s
u s ed more s op h i s t i cat ed f itnes s ev al u ations .
O u s s aid ene et al . [O u s s aid ene et al ., 1996] rep ort in anot h er s t u d y
wh ere t h ey u s ed f arming of f itnes s cas es t o s l av e p roces s ors f rom a
mas t er p roces s or t h at , f or p robl ems of 1000 and more f itnes s cas es
on an I BM S P-2 mach ine, a nearl y l inear s p eed -u p can be obt ai ned .
10. 1. 4 Machi ne Code Evol ut ion / . - v ! =n ^<
E v ol u t i on of p rograms in mach i ne cod e is t reat ed in more d et ai l el s e-
wh ere (s ee C h ap t er s 9 and 11). Here we not e onl y t h at , d u e t o t h e f as t
execu tion of mach i ne cod e on p roces s ors , a cons id erabl e s p eed -u p can
be reach ed by d irectl y ev ol v ing mach i ne cod e. Th ou gh f igu res d if f er
s omewh at d ep end i ng on wh ich s ys t em is comp ared t o mach i ne cod e
ev ol u tion, an accel eration f actor of between 60 and 200 comp ared t o
a t rad i t i onal GP s ys t em can be s af el y as s u med .
10. 1. 5 St ochast ic Sampl ing
I n many GP p robl ems , t h e ev al u ation of a p r ogr am ind iv id u al is
a t i me-cons u mi ng p roces s . C ons id er, f or examp l e, t h e p robl em of
10.1 Improvi ng t he Speed of GP
teach ing a robot th e correct beh av ior in an u nknown env ironment.
A n entire p op u l ation of p rograms h as to be ev al u ated in ord er to
f ind ou t wh ich beh av ior is ap p rop riate (h as a h igh f itnes s ) in th is
env ironment, and wh ich is not. A common p roced u re to comp u te th is
f itnes s meas u re is to l et each p rogram control th e robot f or a certain
time, al l owing th e robot to encou nter s u f f icientl y many s itu ations to
be abl e to ju d ge th e qu al ity of th is p rogram. Th e s ame p roces s is
rep eated f or al l p rograms in th e p op u l ation, with th e robot s u itabl y
p rep ared f or generating equ al cond itions f or al l p rograms .
A s imp l e cal cu l ation s h ou l d h el p to il l u s trate th e d if f icu l ties . S u p -
p os e th e robot can p erf orm an el ementary beh av ior with in 500 ms ,
i.e., ev ery 500 ms th ere wil l be a command is s u ed f rom th e robot th at
d ep end s on its s tate and th e inp u ts p res ent at th e ou ts et of th is p e-
riod . Becau s e a tas k s u ch as nav igating or s earch ing in th e real worl d
is comp l ex, at l eas t 100 d if f erent s itu ations (th e f itnes s cas es ) s h ou l d
be examined in ord er to get a meas u re of f itnes s f or th e ind iv id u al
p rogram. Th u s , 50 s wil l be cons u med f or th e ev al u ation of one in-
d iv id u al . Giv en a rel ativ el y s mal l p op u l ation of 50 p rograms u s ed
f or th e GP ru ns , we end u p need ing at l eas t 40 minu tes to ev al u ate
one generation of beh av ioral p rograms . I n ord er to d o s o, h owev er,
we h ad to p rep are an initial s tarting s tate f or th e robot ev ery 50 s .
With ou t cou nting th e time taken f or th at, a mod erate tes t ru n with ,
s ay, 20 generations wou l d requ ire more th an 13 h ou rs to be inv es ted ,
a rath er f u l l workd ay f or an exp erimenter. A s many res earch ers h av e
f ou nd , ev al u ation is a ted iou s p roces s , ev en with ou t th e p rep aration
f or id entical initial cond itions .
Th ere is one rad ical s tep to s h orten th e time of an ind iv id u al 's
ev al u ation: al l ow each ind iv id u al p rogram to control th e robot f or
ju s t one p eriod of 500 ms , i.e., ev al u ate onl y one f itnes s cas e. Th is
way ev al u ation is accel erated by a f actor of 100. I n ad d ition, we can
s kip - u nd er th es e non-d eterminis tic cond itions - th e p rep aration into
a normal ized initial s tate. E ach p rogram wil l h av e to s teer th e robot
u nd er d if f erent cond itions anyway!
Th is examp l e can be general ized to any typ e of ap p l ication. A
way to accel erate f itnes s ev al u ation is to ev al u ate each ind iv id u al with
a d if f erent (p os s ibl y s mal l s et of ) f itnes s cas e(s ), a meth od we cal l
"s toch as tic s amp l ing" [Nord in and Banzh af , 1995c]. Th e as s u mp tion
is th at ov er a nu mber of s weep s th rou gh th e entire s et of f itnes s cas es ,
accid ental ad v antages or d is ad v antages cau s ed by th e s toch as tic as -
s ignment of f itnes s cas es to ind iv id u al s wil l cancel ou t and ind iv id u al s
wil l d ev el op th at are f it on th e bas is of th e entire s et of f itnes s cas es .
A s id e ef f ect of th is meth od is th e tend ency toward general iza-
tion. We can exp ect th at th e d riv e toward more general s ol u tions
is mu ch s tronger with th is meth od th an with keep ing th e f itnes s
10 Advanced Genetic Programmi ng
cas es cons t ant . A s imil ar ef f ect h as been obs erv ed wi t h t h e on-
l ine v ers u s bat ch l earning met h od s f or s u p erv is ed neu ral networks
[Hech t-Niel s en, 1988].
S toch as tic s amp l ing is al s o mu ch cl os er t o f itnes s ev al u ation in
nat u r e and nat u r al s el ection, wh ere ev al u ation can t ake p l ace onl y
l ocal l y in s p ace and t i me. Th e non-d et ermi ni s m imp l icit in s u ch an
ap p roach can ev en be u s ed t o good ef f ect, e.g., f or es cap ing l ocal
mi ni ma.
I n [Gath ercol e and Ros s , 1994] [Gath ercol e and Ros s , 1997a] an-
ot h er ap p roach t oward s el ection of f itnes s cas es is p rop os ed . Th r ou gh
obs erv ation of t h e p erf ormance of a GP ru n Gat h ercol e and Ros s ' s
s ys t em obt ai ns d at a abou t wh ich f itnes s cas es are d if f icu l t and wh ich
are eas y (th ere is al s o an age f actor weigh ed in). S u bs equ entl y, t h e
s ys t em p ref erential l y s el ects th os e f itnes s cas es wh ich h av e a h igh er
rank bas ed on th es e criteria. S o in t h i s ap p roach , a "s orting" of f itnes s
cas es t akes p l ace wh ich l ead s t o a two-f ol d accel eration in l earning,
f irs t bas ed on t h e f act t h at onl y s u bs ets of t h e entire t rai ni ng s et are
s el ected , and s econd bas ed on t h e f act t h at t h e s ys t em ch oos es t h e
h ard er ones .
A not h er interes ting s u gges tion [Gath ercol e and Ros s , 1997a]
[Gath ercol e and Ros s , 1997b] by t h e s ame au t h ors is t o res trict f it-
nes s ev al u at i on by keep ing t rack of t h e cu mu l at i v e error an ind iv id u al
h as col l ected in t h e cou rs e of ev al u ation. I f , d u ri ng ev al u ation, t h e
cu mu l at i v e error s h ou l d exceed an ad ap t i v e t h res h ol d , ev al u at i on is
s t op p ed , and al l f itnes s cas es t h at h av e not been ev al u at ed are reg-
is tered as f ail u res . Th e error t h res h ol d ad ap t s t o t h e p erf ormance of
t h e bes t ind iv id u al of a generation.
10.2 Improvi ng the Evolvability of Programs
GP h as es tabl is h ed its el f as a p owerf u l l earning tool - of ten wi t h v ery
bas ic f u nction s ets . For examp l e, u s ing onl y Pl u s , Minu s , Times ,
Di v i d e and bitwis e Bool ean op erat ors , a l inear GP s ys t em h as ou t-
p erf ormed neu ral networks on p at t er n recognition p robl ems . Bu t t h e
GP s ys t em was not al l owed I f - t h e n - e l s e , For, Do - u n t i l , Do- wh i l e,
or ot h er l oop ing cons t ru ct s , wh ereas a mu l til ayer f eed f orward neu ral
network h as ad d i t i on, s u bt ract i on, mu l t i p l i cat i on, d iv is ion, and con-
d i t i onal branch i ng cap abil ities bu il t into its neu ron s qu as h i ng and
t h res h ol d f u nctions and its trans f er f u nctions . GP can accomp l is h
a l ot wi t h a v ery res tricted s et of op erat ors . Th at s aid , t h er e are
many ways t h at GP can imp rov e t h e exp res s iv e p ower of ev ol v abl e
p rograms .
10.2 Improving the Evolvability of Programs
10. 2. 1 Mod u l a r i za t i on
A natu ral tool f or h u mans wh en d ef ining an al gorith m or comp u ter
p rogram is to u s e a mod u l arization tech niqu e and d iv id e th e s ol u tion
into s mal l er bl ocks of cod e. Hu man p rogrammers f ind it u s ef u l to s u b-
d iv id e a p rogram h ierarch ical l y into f u nctions . Th is is an examp l e of
a divide an d con quer s trategy - one of th e mos t bas ic p robl em s ol v -
ing s trategies known. GP s ys tems may h av e s ome tend ency toward
s el f -mod u l arization.
Mod u l arization in general is a meth od by wh ich f u nctional u nits
of a p rogram are id entif ied and p ackaged f or reu s e. S ince h u man p ro-
grammers h av e to s tru ggl e cons tantl y with th e increas ing comp l exity
of s of tware - as h u mans general l y h av e to wh en d eal ing with th e com-
p l exity of th eir env ironment - th e natu ral tool of th ou gh t, namel y,
to bu nd l e entities into abs tractions to be u s ed l ater on as u nits , is
al s o u s ef u l in p rogramming. Mod u l ar ap p roach es are mains tream in
s of tware engineering and res u l t, general l y s p eaking, in s imp l er and
more generic s ol u tions .
Let u s f irs t l ook at a general d ef inition of mod u l es as giv en by
You rd on and C ons tantine [You rd on and C ons tantine, 1979].
Definition 10.1 A mod u l e is a lexically con tiguous sequen ce of
program statemen ts, boun ded by boun dary elemen ts, havin g an aggre-
gate iden tifier.
A mod u l e h as at l eas t th e f ol l owing p rop erties :
it is l ogical l y cl os ed ;
it is a bl ack box (ref erred to as th e inf ormation h id ing p rincip l e
in comp u ter s cience); and
it of f ers an interf ace to oth er mod u l es .
Module
A n in terface between mod u l es is th e s et of op erations and d ata
typ es of f ered to oth er mod u l es by a mod u l e.
Mod u l arization ap p roach es are central wh en trying to tackl e two
of th e main p robl ems of s imp l e GP: s cal ing and inef f iciency. Mod u -
l arization meth od s weigh in th e benef its of encap s u l ating cod e and
u l timatel y general izing f rom one to more ap p l ications of th e s ame (en-
cap s u l ated ) p iece of cod e. I f GP is abl e to work with bu il d ing bl ocks ,
as s ome res earch ers h av e s u gges ted (and oth ers h av e d ou bted ), th en
mod u l es wil l be s ynonymou s with bu il d ing bl ocks .
A key to u nd ers tand ing wh y mod u l arization and encap s u l ation
are u s ef u l in GP h as to d o with th e ef f ects of cros s ov er on bu il d -
ing bl ocks . A l l mod u l arization tech niqu es are ways of encap s u l ating
Encapsulation of Code
against Inefficiency
Building Blocks
10 Advanced Genetic Programmi ng
bl ocks of cod e. S u ch encap s u l at ed bl ocks become s u brou t i nes and can
be cal l ed rep eat ed l y f rom t h e mai n p rogram or f rom ot h er s u brou -
tines . Th i s means t h at a p rogram can red u ce its l ength by p u t t i ng
f requ entl y u s ed id entical bl ocks of cod e into a s u brou t i ne. A s we
h av e argu ed earl ier in C h ap t er 7, p rograms of s h ort er ef f ectiv e l engt h
h av e bet t er ch ances of s u rv iv al t h an p rograms wi t h l arger ef f ectiv e
l engt h . Th u s it migh t be exp ect ed t h at s ome mod u l ari zat i on tech -
niqu es work s p ontaneou s l y: as s oon as working cod e is encap s u l at ed ,
t h e od d s of it being d es troyed by cros s ov er are zero. Hence, encap s u -
l ation is a cros s ov er p rot ect i on, and more general l y, a v ariation p ro-
t ect i on mech ani s m. I n ad d i t i on t o t h at , s h orter p rograms are bet t er
at general izing wh en ap p l ied t o u ns een d at a. Th u s mod u l ari zat i on in
GP can be s een t o af f ect general ization in a p os itiv e way. Re-u s e of
mod u l es is f u rth er f acil itated by p l acing mod u l es into a l i brary f rom
wh ere t h ey can be cal l ed by d if f erent ind iv id u al s .
Dif f erent mod u l ari zat i on tech niqu es h av e been s u gges ted f or ge-
netic p rogrammi ng. A u t omat i cal l y d ef ined f u nctions (A DF) are t h e
mos t t h orou gh l y ev al u ated met h od [Koza, 1994a]. O t h er examp l es of
mod u l ari zat i on t ech ni qu es incl u d e encap s u l at i on [Koza, 1992d ] and
mod u l e acqu is ition [A ngel ine and Pol l ack, 1993].
10.2.2 Automati cal l y Defined Functions
A u t omat i cal l y d ef ined f u nctions (A DFs ) h av e been p rop os ed by Koza
and rep res ent a l arge p rop ort i on of h is more recent work [Koza, 1994a].
A DFs are ins p ired by h ow f u nctions are d ef ined in LI S P d u ri ng nor-
mal manu al p rogrammi ng. Th e p rogram ind iv id u al cont ai ni ng A DFs
is a tree j u s t l ike any p rogram in regu l ar tree-bas ed GP. Howev er,
wh en u s ing A DFs , a tree is d iv id ed into two p ar t s or branch es :
| 1. Th e result-producin g bran ch, wh ich is ev al u at ed d u ri ng f itnes s
cal cu l ation; and
2. t h e fun ction -defin in g bran ch, wh ich contains t h e d ef inition of
one or more A DFs .
Th es e two branch es are s imil ar t o p rogram s t ru ct u res in, e.g.,
C or Pas cal . Th ere, a main p ar t is accomp ani ed by a p ar t f or t h e
d ef inition of f u nctions . Th e mai n p ar t corres p ond s t o t h e res u l t-
p rod u ci ng branch wh il e t h e d ef inition p ar t nat u ral l y corres p ond s t o
t h e f u nction-d ef ining branch . Bot h of t h es e p r ogr am comp onent s
p art i ci p at e in ev ol u tion, and t h e f inal ou t come of GP wi t h A DFs is
a mod u l ar p rogram wi t h f u nctions .
Fi gu re 10.1 giv es an examp l e of a p rogram i nd i v i d u al wi t h an
A DF. A t t h e t op one can s ee t h e root nod e Program wh ich is j u s t
10.2 Improving the Evolvability of Programs
EE3
a p l ace h ol d er t o keep t h e d if f erent p ar t s of t h e tree t oget h er. Th e
nod e d ef u n t o t h e l ef t is t h e root nod e of an A DF d ef inition. I f t h ere
were more t h an one A DF t h en we wou l d h av e more t h an one d ef u n
nod e u nd er t h e Program nod e. I n ot h er word s , we may need more
t h an one A DF d ef inition in t h e f u nction-d ef ining p ar t of t h e p rogram.
Likewis e, it is al s o p os s ibl e t o h av e more t h an one res u l t -p rod u ci ng
branch . Th e Val u es f u nction d et ermi nes t h e ov eral l ou t p u t f rom t h i s
ind iv id u al . I f t h e res u l t -p rod u ci ng branch r et u r ns a s ingl e v al u e onl y,
t h en it is cal l ed t h e result-producin g bran ch. Th e A DF d ef inition Result-Producin g
branch h as a s imil ar Val u es nod e wh ich wrap s t h e res u l t f rom t h e Bran ch
A DF bod y. I n mos t examp l es Val u es is a d u mmy nod e ret u rni ng
wh at it receiv es f rom bel ow in t h e tree.
Th e nod e l abel ed A DFO in Fi gu re 10.1 is t h e name of t h e s ingl e
A DF we u s e in t h e ind iv id u al . Th i s is a name of a f u nction and it
wil l be a p ar t of t h e fun ction set of t h e res u l t -p rod u ci ng branch t o
al l ow t h i s branch t o cal l t h e A DF. Ju s t t o t h e righ t of t h e A DFO
nod e is t h e argu ment l is t. Th i s l is t d ef ines t h e names of t h e i np u t
v ariabl es t o t h e A DFO f u nction. Th es e v ariabl e names wil l t h en be
a p ar t of t h e t ermi nal s et of t h e A DFO f u nction bod y. Th e p rincip l e
is s imil ar t o a f u nction d ef inition in C or Pas cal wh ere we need t o
giv e t h e f u nction a name and d ef ine its i np u t v ariabl es t oget h er wi t h
a f u nction bod y d ef ining wh at t h e f u nction d oes . A l l ev ol u tion takes
p l ace in t h e bod ies of t h e A DFs and t h e res u l t -p rod u ci ng branch (s ee
Fi gu re 10.1).
Dep end i ng on h ow t h e s ys t em is s et u p it is al s o p os s ibl e t o h av e
h ierarch ies of A DFs , wh ere an A DF at a h igh er l ev el is al l owed t o
cal l an A DF at a l ower l ev el . Normal l y, one mu s t t ake care t o av oid
recu rs ion t h ou gh an A DF t h at cal l s its el f eith er d irectl y or v ia a ch ain
of ot h er A DFs . I n p rincip l e, it wou l d be p os s ibl e t o al l ow recu rs iv e
A DF cal l s , bu t t h i s is an area of GP t h at need s more exp l orat i on.
I t is ev id ent t h at t h e A DF ap p roach wil l work onl y wi t h a s p e-
cial , s yntactical l y cons t rai ned cros s ov er. We cannot u s e t h e s imp l e
GP cros s ov er cros s ing ov er any s u bt ree wi t h any ot h er s u bt ree. For
i ns t ance, we mu s t keep al l of t h e nod es t h at d o not ev ol v e in Fi gu re
10.1 i nt act . Th ere are s ep arat e f u nction s ets f or t h e res u l t -p rod u ci ng
branch and t h e f u nction-d ef ining branch , and t h e t er mi nal s ets are
al s o d if f erent. C ros s ov er mu s t not mov e s u bt rees bet ween t h e two d if -
f erent branch es of t h e A DF. Hence, cros s ov er is d one by f irs t s el ecting
a s u bt ree in eith er t h e f u nction-d ef ining or t h e res u l t -p rod u ci ng p ar t
of one p ar ent . Th e cros s ov er p oi nt in t h e s econd p arent t h en h as t o
be ch os en in t h e s ame type of branch , ens u ring t h at we s witch s u b-
trees onl y bet ween A DF branch and A DF branch or res u l t -p rod u ci ng
br anch and res u l t -p rod u ci ng branch .
EEl
10 Adv a nce d Genet ic Pr og r a mmi n g
Figure 10. 1
A typical automatically
defined function
definition
Bef ore s tarting a ru n with a GP s ys tem th at u s es A DFs we mu s t
d etermine th e nu mber of A DFs and th e nu mber of argu ments each
is al l owed to u s e. I n oth er word s , we h av e to s p ecif y th e s h ap e of
th e nod es th at d o not ev ol v e in Figu re 10.1. Du ring initial ization
th e s ys tem wil l keep track of th is d ef inition and wil l p rod u ce onl y
ind iv id u al s with th is s h ap e. Th e f u nction-d ef ining bod ies and th e
res u l t-p rod u cing bod ies are th en generated rand oml y.
Figu re 10.2 s h ows an examp l e ind iv id u al wh ere th e cu be f u nction
h as ev ol v ed as an A DF. Th is A DF is th en u s ed in th e res u l t-p rod u cing
branch to real ize th e x
6
f u nction.
A DFs h av e been s h own to ou tp erf orm a bas ic GP al gorith m in
nu merou s ap p l ications and d omains . A l s o, Kinnear h as comp ared
th e p erf ormance of A DFs to th e p erf ormance of anoth er mod u l ar-
ization tech niqu e cal l ed "mod u l e acqu is ition" d ef ined bel ow (s ee S ec-
tion 10.2.4). I n h is s tu d y [Kinnear, Jr., 1994], A DFs ou tp erf ormed
both a bas ic GP al gorith m and a GP al gorith m with mod u l e acqu is i-
tion. Bu t in accord ance with wh at we s aid earl ier, A DFs s eemed to
giv e a p erf ormance ad v antage onl y wh en th e introd u ction of f u nctions
red u ced th e l ength of p os s ibl e s ol u tions s u f f icientl y [Koza, 1994a].
I n s u mmary, th es e are th e s tep s need ed wh en ap p l ying GP with
A DFs :
1. C h oos e th e nu mber of f u nction-d ef ining branch es .
2. Fix th e nu mber of argu ments f or each A DF.
3. Determine th e al l owabl e ref erencing between A DFs if more th an
one A DF is u s ed .
10. 2 I mpr ovi ng t he Evol vabil it y of Pr og r a ms TST1
Figure 10.2
Example of an ADF
program tree
4. Determine th e f u nction and terminal s ets f or both of th e branch es
(remember th ey are d if f erent).
5. Def ine th e f itnes s meas u re and f ix p arameters and th e termina-
tion criterion, as in any oth er GP ru n.
A weaknes s of th e A DF ap p roach is th at th e arch itectu re of th e
ov eral l p rogram h as to be d ef ined by th e u s er bef oreh and . Th e ar-
ch itectu re cons is ts of th e nu mber of f u nction-d ef ining branch es in th e
ov eral l p rogram, th e nu mber of argu ments (if any) p os s es s ed by each
f u nction-d ef ining branch , and , if th ere is more th an one f u nction-
d ef ining branch , th e natu re of th e h ierarch ical ref erences (if any) al -
l owed by th em. Th is requ irement ad d s anoth er s et of p arameters
to th e initial p arameters of a GP ru n. I t wou l d be mu ch better if
th e comp l ete s tru ctu re of an ind iv id u al cou l d ev ol v e, incl u d ing al l
A DF s p ecif ications . Koza [Koza, 1995a] h as p rop os ed architecture
alterin g operation s as a meth od to ach iev e th is goal . A rch itectu re
ref ers to th e comp l ete s tru ctu re of th e p rogram ind iv id u al . He p ro-
Architecture Altering
Operations
K: 1: B 10 Advanced Genetic Programmi ng
p os ed s ix arch i t ect u re al tering genetic op erat i ons t h at can ad d initial
A DF s t ru ct u res , cl one t h em, and ch ange t h e nu mber of p ar amet er s .
A gain, nat u r e was u s ed as a s ou rce of ins p iration by ref erring t o gene
d u p l i cat i on [O h no, 1970].
Gen e Duplication E v ol u t i on by gene d u p l i cat i on works by occas ional d u p l i cat i on
of a gene t h at d oes s omet h i ng u s ef u l . Th e ris k of s u ch an ev ent is
s mal l - an ad d i t i onal cop y of t h e s ame gene onl y marginal l y af f ects
an ind iv id u al . Howev er, t h e cop y can be mu t at ed away f rom its
original f u nction into a d if f erent f u nction becau s e t h e original gene
is s til l f u nctional . Us ing arch i t ect u re al tering op erat i ons and gene
d u p l i cat i on, no ad d i t i onal p res p ecif ied inf ormation is neces s ary f or
an A DF r u n comp ared t o a bas ic GP ru n. E v en i t erat i on-p erf ormi ng
branch es cou l d be ad d ed wi t h t h i s met h od [Koza and A nd re, 1996b].
A s ys t em wi t h arch i t ect u re al t eri ng op erat i ons can be bench -
marked agains t an A DF s ys t em wi t h p red ef ined s ize and s h ap e, bu t
t h e ou t come wil l s t rongl y d ep end on wh ich p red ef ined arch i t ect u re it
was comp ared t o. O ne recent s t u d y [Koza, 1995b] comp ared , f or one
p robl em, t h e arch i t ect u re al tering met h od t o t h e bes t known p red e-
f ined arch i t ect u re. Th e res u l t was t h at t h e new met h od p erf ormed
s l ower. I t is t oo earl y t o d raw any concl u s ion, t h ou gh , and one s h ou l d
al ways keep in mi nd t h at t h e benef its of s p ecif ying f ewer p ar amet er s
are v ery i mp or t ant .
10. 2. 3 Encapsul at ion
Th e original id ea of encap s u l at i on in GP is d u e t o Koza [Koza, 1992d ]
wh o i nt rod u ced it as an el ement ary op erat i on into h ierarch ical GP.
A l l of t h e f ol l owing, h owev er, is al s o ap p l icabl e t o l inear GP.
En capsulation of Th e op erat i on of encap s u l at i on cons is ts of s el ecting an ind iv id -
Subtrees in to Termin als u al f rom t h e p op u l at i on, s el ecting a non-t ermi nal nod e wi t h i n t h at
ind iv id u al and rep l acing t h e s u bt ree bel ow t h at nod e wi t h a newl y
d ef ined t ermi nal nod e t h at cont ai ns t h e s u bt ree remov ed . Th e new
t ermi nal is ap p l icabl e in ot h er ind iv id u al s f rom th is moment on. Re-
mov ing t h e entire s u bt ree h as t h e ef f ect of ad mi t t i ng onl y f u nctions
wi t h ari t y 0 as encap s u l at ed cod e. Nev erth el es s , if t h e newl y d ef ined
t ermi nal s h ou l d t u r n ou t t o contain u s ef u l cod e, reu s e h as been mad e
p os s ibl e.
A n examp l e of encap s u l at i on is s h own in Fi gu re 10.3 f or t h e ari t h -
met i c exp res s ion of Fi gu re 9.14. By rep l acing a s u bt ree wi t h a new
nod e EQ, cros s ov er can no l onger recombine p ar t s of t h e s u bt ree.
A nal ogou s l y, ot h er op erat i ons are p roh i bi t ed f rom ch anging t h i s p ar t
of t h e cod e. Prov i d ed t h e s u bt ree contains u s ef u l op erat i ons , t h i s
is benef icial . A t p res ent it is u ncl ear wh et h er encap s u l at i on real l y
conf ers a s ignif icant ad v ant age on a GP s ys tem.
10. 2 I mpr ov i ng t he Evol vabil it y of Pr ogr a ms
ESJ
Figure 10. 3
Eo is used as a terminal
to symbolize an
encapsulated subtree of
the arithmetic expression
of Figure 9.14. The full
tree can be shortened
through the substitution.
10.2.4 Modul e Acquisition
A noth er f orm of p rep aring cod e f or reu s e is mod u l e acqu is ition cis -
cu s s ed in [A ngel ine and Pol l ack, 1992] [A ngel ine and Pol l ack, 1993].
Mod u l e acqu is ition can be u s ed as an el ementary op erator to act on
an ind iv id u al . From a ch os en ind iv id u al a s u btree is s el ected and a
p art of th is s u btree (u p to a certain d ep th ) is d ef ined as a mod u l e.
Th is op eration h as al s o been cal l ed comp res s ion. Th e p arts of th e
s u btree bel ow th e mod u l e are cons id ered argu ments to th e mod u l e.
I n th is way, mod u l e acqu is ition of f ers a way to create new f u nctions ,
mu ch as Koza's encap s u l ation op eration generates new terminal s .
A ngel ine and Pol l ack go anoth er way, h owev er. I n th eir ap p roach ,
th e new mod u l e is p l aced in a l ibrary of mod u l es f rom wh ere it can
be ref erenced by ind iv id u al s in th e p op u l ation. Figu re 10.4 giv es a
s ketch of th e p roced u re. I f a mod u l e p rov id es s ome f itnes s ad v antage
in th e p op u l ation, it wil l s p read to more ind iv id u al s , th u s increas ing
th e nu mber of ref erences to it in th e l ibrary. A s l ong as th ere is any
one ind iv id u al in th e p op u l ation to ref er to th is mod u l e, it is kep t in
th e l ibrary.
Mu ch in th e s p irit of encap s u l ation, once a mod u l e is d ef ined it
ceas es to ev ol v e any f u rth er. Mod u l e acqu is ition th u s giv es op era-
tor p rotection to th e mod u l es , al th ou gh p arameters are al l owed to
ch ange. Th e comp res s ion op eration carries a p arameter its el f , th e
d ep th at wh ich th e mod u l e is cu t off. Th ere migh t ev en be two
p arameters u s ed , one f or minimal d ep th , one f or maximal d ep th of
mod u l es . We note in p as s ing th at th e au th ors al s o introd u ce an op -
erator cou ntering th e ef f ect of comp res s ion: exp ans ion. E xp ans ion
s el ects a s ingl e mod u l e to exp and in an ind iv id u al and exp and s it one
l ev el . S o oth er mod u l es are not af f ected nor are any mod u l es th at
migh t be ins id e th e exp and ed mod u l e.
Encapsulation into
Library Functions
The Library Is Available
to the Entire
Population
The Counter-Operator:
Expansion
EETfil 10 Adv a nce d Genet ic Pr og r a mmi n g
Figu re 10.4
How a module is
acquired. A node is
selected, and its subtree,
down to a certain depth,
is considered a module
and moved into the
library. The module
might contain terminal
branches, as well as
functional branches that
become arguments of the
module.
O ne v ery i mp or t ant s imil arity t o t h e encap s u l at i on met h od men-
t i oned in t h e f oregoing s ection is t h at newl y d ef ined mod u l es are
av ail abl e gl obal l y, i.e., t o t h e entire p op u l at i on. Ki nnear h as d one
a comp arat i v e s t u d y on t h e u s e of mod u l e acqu is ition bu t concl u d es
t h at t h ere is no obv iou s ad v ant age [Kinnear, Jr. , 1994]. Howev er, it
is t oo earl y t o cl os e t h e books on mod i d e acqu is ition, becau s e t h e one
s t u d y d one was bas ed on a l imited s amp l e of ru ns and p robl ems .
10. 2. 5 Adapt ive Repr esent at ion
A d ap t i v e rep res ent at i on is anot h er t ech ni qu e f or mod u l ari zat i on in
GP [Ros ea and Bal l ard , 1994b]. Bas ed eith er on h eu ris tic inf orma-
tion abou t t h e p robl em d omai n or, p ref erabl y, on cert ai n s t at i s t i cal
inf ormation av ail abl e in t h e p op u l at i on, s mal l s u bt rees are named t o
10.2 Improving the Evolvability of Programs MM I
be cand i d at es f or mod u l es . Th es e s u bt rees are ext ract ed f rom t h e
p op u l at i on in ord er t o s erv e as new f u nctions or s u brou t i nes f or f u r-
t h er ev ol u tion.
E v ery s t ep of t h i s kind can be d one by u s e of a p art i al new s eed - Epochs
ing of t h e p op u l at i on wi t h ind iv id u al s containing t h e newl y d ef ined
f u nctions . Th u s , t h e E A h as a new t i me s cal e cal l ed an epoch l as ting a
nu mber of generat i ons u ntil a new s et of cand i d at es f or mod u l es is ex-
t r act ed f rom t h e p op u l at i on. Ros ea et al . [Ros ea and Bal l ard , 1994b]
cl aim t h at t h ei r met h od is t h e onl y bot t om- u p met h od f or mod u l ar-
ization d ev el op ed s o f ar t h at real l y catch es wh at s h ou l d be cont ai ned
in mod u l es .
To d et ermi ne wh ich p ar t s of p rograms migh t s erv e as v iabl e mod - Viability of Modules
u l es , Ros ea et al . i nt rod u ce t h e l earning of ad ap t i v e rep res ent at i on
bas ed on d if f erential of f s p ring-p arent f itnes s and on t h e notion of
act i v i t y of cert ai n p ar t s of t h e p rograms . I n a nu ts h el l , t h e f ormer
criterion id entif ies ind iv id u al s in t h e p op u l at i on t h at p res u mabl y p os -
s es s h igh l y f it s u bt rees . Th e not i on is t h at , once an ind iv id u al h as
mad e a j u mp in f itnes s comp ared t o its p arent s , t h i s s h ou l d be d u e
t o a u s ef u l combi nat i on of genetic mat eri al in t h i s ind iv id u al .
Now t h at t h e genetic mat eri al h as been narrowed d own, t h e Salien t Blocks of Code
s earch f or s al ient bl ocks of cod e is t h e s econd s t ep . Th e criterion an d Block A ctivation
ap p l ied h ere is bl ock activ ation, t h at is , t h e execu tion f requ ency of
a p art i cu l ar p ar t of t h e cod e wi t h i n t h e ind iv id u al . Th e meas u re-
ment of bl ock act i v at i on of new bl ocks of cod e is , accord ing t o Ros ea
[Ros ea, 1995a], d one in 0{N) t i me. Nod es wi t h t h e h igh es t v al u e of
bl ock act i v at i on are cons id ered cand i d at es , p rov id ed al l nod es in t h e
s u bt ree h av e been act i v at ed at l eas t once.
O nce bl ocks of cod e h av e been s el ected , t h ey are general ized by
d rop p i ng v ariabl es , wh ich is an i mp or t ant h eu ris tic. Ros ea argu es
t h at t h i s way h e is abl e t o creat e mod u l es of a v ariabl e nu mber of
argu ment s .
He cl aims t o f ind ext remel y interes ting mod u l es u s ing t h e ad ap -
tiv e rep res ent at i on met h od . I n exp eri ment al res u l ts p res ent ed on an
agent beh av ior p robl em in a d ynami c worl d [Ros ea, 1995a] - a Pac-
man-l ike p robl em earl ier d es cribed by Koza [Koza, 1992d ] - Ros ea
s h ows t h at ad ap t i v e rep res ent at i on ru ns mai nt ai n h igh er d iv ers ity in
t h e p op u l at i on and d is cov er ap p rop ri at e mod u l es mu ch f as ter t h an
conv entional GP.
10. 2. 6 Aut omat ical l y Defined Macr os
S p ector h as s u gges ted and ev al u at ed a v ariant of A DFs cal l ed A u t o-
mat i cal l y Def ined Macros (A DMs ) [S p ector, 1996]. Macros are mod -
u l ari zat i on s t ru ct u res wh ich are p ar t of mos t comp u t er l angu ages and
10 Advanced Genetic Programmi ng
d ef ine t rans f ormat i ons t o be p erf ormed on t h e s ou rce cod e bef ore it
is comp il ed or i nt erp ret ed . A common macro t rans f ormat i on is s u b-
s t i t u t i on, wh ere t h e p rogrammer s u bs t i t u t es f requ ent cod e f ragments
by macros . Th e macros are expan ded by a p rep roces s or bef ore comp i-
l ation or i nt erp ret at i on. Many LI S P d ial ects contain p owerf u l macro
cap abil ities t h at can be u s ed t o i mp l ement new control s t ru ct u res . I f
a p rogram is p u rel y f u nctional , t h en t h ere is no d if f erence in res u l t
between a macro and a f u nction. Howev er, if t h e macro u s es s id e ef-
f ects or is s ens itiv e t o its cal l ing cont ext , t h en it can p rod u ce u ni qu e
ef f ects .
S p ector s h ows h ow s u bs t i t u t i on macros can be ev ol v ed s imu l ta-
neou s l y wi t h t h e mai n p rogram in a met h od anal ogou s t o t h e A DF
met h od . Th e ev ol v ed macros can be s een as s p ecial control s t ru ct u res ,
p rod u ci ng, f or examp l e, s p ecial ized f orms of i t erat i on or cond itional
execu tion.
O ne d i s ad v ant age of macros is t h at t h e macro exp ans ion p roces s
and t h e execu tion of exp and ed macros can s ometimes t ake mu ch more
t i me t h an cal l s t o f u nctions , d ep end i ng on t h e i mp l ement at i on. I n
ad d i t i on, t h e cach ing of v al u es p rov id ed by argu ment s t o f u nctions ,
bu t not by argu ment s t o macros , can s ometimes be v al u abl e. S o
macros s h ou l d onl y be u s ed wh ere s id e ef f ects or context s ens itiv ity
are an i mp or t ant p ar t of t h e ap p l ication. S p ector s h ows h ow t h e
A DM met h od h as ad v ant ages ov er A DFs in cert ai n s i mu l at ed control
t as ks wh il e A DFs p rod u ce bet t er res u l ts in ot h er control t as ks . He
concl u d es t h at A DMs are l ikel y t o p rod u ce bet t er res u l t s in non-
f u nctional d omai ns wh il e A DFs may be bet t er s u ited f or f u nctional
d omai ns wi t h f ew s id e ef f ects .
10. 2. 7 Modul es and Crossover
Th e d is cu s s ion abov e h as s h own h ow we can p rot ect cod e f rom being
d es troyed by v ariation op erat i ons l ike cros s ov er or mu t at i on. Th e
mai n ans wer of au t h ors was encap s u l at i on. By f reezing cod e and
comp res s ing it into t ermi nal s and f u nctions , t h i s goal cert ai nl y can be
reach ed , s ince, by d ef inition, f u nctions and t ermi nal s are t h e "atomic
u ni t s " of GP. A l s o, mod u l ari zat i on u s ing A DFs h as been s h own t o
increas e p rot ect i on of cod e [Tel l er, 1996].
Bu t we migh t t u r n t h e qu es tion arou nd , and as k: if a GP s ys t em
h as ev ol v ed (wi t h ou t t h e h el p of encap s u l at i on) a s ol u tion t o a p rob-
l em, a s ol u tion t h at cont ai ns ch u nks of cod e s ep arat ed by cros s ov er-
p rot ect i ng cod e s egments l ike i nt rons ,
1
are th es e ch u nks of cod e ac-
tu al l y mod u l es ? I f we go back t o t h e d ef inition of mod u l es giv en
1
C ros s ov er p rotection is by f ar th e mos t imp ortant p rotection, giv en th e
l arge amou nt of cros s ov er u s ed in GP.
10.2 Improving the Evolvability of Programs
earl ier in th is ch ap ter, a d ef inition wh ich is now ad op ted wid el y in
comp u ter s cience, th ey d o f it th is d ef inition exactl y.
I n f act, cros s ov er can be exp ected to be th e onl y op erator to f ind
th es e ch u nks of cod e, s ince contigu ity is one of its h al l marks . I n ad d i-
tion, it can be argu ed th at intron s egments s ep arating ef f ectiv e p ieces
of cod e wil l ev ol v e p ref erential l y at th os e p l aces wh ere interactions
between s u bs equ ent ins tru ctions are minimal and d is ru p tion of th e
s equ ence is not h armf u l . Th os e p ieces of cod e th at h av e minimal
interaction wil l th eref ore be au tomatical l y s ingl ed ou t. Bu t wh at is
mis s ing is th e aggregate id entif ier, th ou gh th is cou l d be ad d ed wh en
making th e mod u l e exp l icit. Th e bou nd ary el ements need to be ad d ed
at th e s ame time.
We are th eref ore l ed to th e concl u s ion th at ch u nks of cod e wh ich
ev ol v ed togeth er and h av e an actu al f u nction, i.e., are not introns ,
can be cons id ered mod u l es or cand id ate mod u l es .
10.2.8 Loops and Recursion
Loop s and recu rs ion are u s ef u l to any comp u ter s ys tem. With ou t
th em, a comp u ter wou l d s imp l y cons u me al l of its p rogram memory
in a few s econd s and th en s top . Th is d oes n ot mean th at we cou l d
not h av e any u s ef u l p rogram p arts with ou t iterativ e s tru ctu res or th at
GP wou l d be u s el es s with ou t l oop s , bu t f or a comp u ter s ys tem to be
comp l ete it need s iteration. GP, too, mu s t be abl e to ad d res s th es e
is s u es in ord er to s cal e u p to more comp l ex p robl em d omains . O ne of
th e ch al l enges of GP is to ev ol v e comp l ete comp u ter ap p l ications , and
if th is is ev er going to be p os s ibl e, th en iteration is neces s ary. Bu t
l oop s and recu rs ion are al s o benef icial to s mal l er p rograms of th e typ e
cu rrentl y ad d res s ed with GP. I teration can res u l t in more comp act
p rograms th at among oth er th ings al l ow better general ization.
Th e p robl em with iteration is th at it is v ery eas y to f orm inf inite In fin ite Loops
l oop s . Wors e, it is th eoretical l y imp os s ibl e to d etect inf inite l oop s in
p rograms . Th e h al ting th eorem d es cribed in S ection 3.3.2 s tates th at
we cannot d ecid e wh eth er a comp u ter p rogram wil l h al t or not. I n
GP th is cou l d mean th at th e entire s ys tem migh t wait f or th e f itnes s
ev al u ation of an ind iv id u al th at h as gone into an inf inite l oop . E v en if
we were abl e to d etect inf inite l oop s , th ere wou l d s til l be enou gh f inite
l oop s execu ting f ar too l ong to be accep tabl e in a l earning s itu ation.
Hence, we mu s t f ind a way to control th e execu tion of p rograms th at
contain l oop s and recu rs ion.
Th ere are in p rincip l e th ree ways to ad d res s th e is s u e of inf inite
and "near-inf inite" l oop s :
10 Advanced Genetic Programmi ng
Th e s imp l es t s ol u tion is t o d ef ine a l imit on t h e nu mber of
i t erat i ons f or each p rogram and f itnes s cas e. A gl obal v ariabl e
is i ncrement ed f or each i t erat i on and execu tion is abor t ed wh en
it exceed s a p red ef ined maxi mu m v al u e.
Th e i t erat i on l imit can be d ef ined more f l exibl y by al l owing t h e
p r ogr am t o d i s t ri bu t e execu tion t i me among d if f erent f itnes s
cas es and ev en t o make its own j u d gment s of t h e trad eof f be-
tween qu al i t y of s ol u tions and execu tion t i me. Th i s met h od is
ref erred t o as aggregate comp u t at i on t i me ceil ing.
I n s ome cas es , it is p os s ibl e t o ens u re t h at t h e p robl em d o-
mai n and t h e f u nction and t ermi nal s ets are cons t ru ct ed s u ch
t h at t h ere cou l d be no inf inite or v ery l ong l oop s . I t mi gh t be
neces s ary t o ch ange t h e original rep res ent at i on and t o s witch
p rimitiv es t o ach iev e t h i s goal .
A n examp l e f rom t h e l as t category is Brav e' s s ys t em f or ev ol u tion
of t ree s earch p rograms [Brav e, 1994] [Brav e, 1995]. A t ree s earch
p r ogr am nav igates in a t ree d at a s t r u ct u r e in ord er t o f ind a s p ecif ic
nod e or t o obt ai n a s p ecif ic s t at e [Nil s s on, 1971]. E ach p r ogr am is
recu rs iv e in its s t ru ct u re, bu t d u e t o t h e l imited d ep t h of t h e i np u t
trees each p rogram is d es tined t o t er mi nat e.
Ki nnear u s es a s p ecial ized l oop cons t ru ct ( d obl ) t o ev ol v e s ort-
ing al gori t h ms [Kinnear, Jr. , 1993b]. Th e l oop cons t ru ct op erat es on
ind ices of l is ts wi t h l imited l ength , and h ence al s o l imits t h e nu mber
of i t erat i ons t o a f inite nu mber.
Koza h as al s o p erf ormed exp eri ment s wh ere h e ev ol v ed recu rs iv e
s equ ences , and h e h as been abl e t o p rod u ce t h e Fi bonacci s equ ence
[Koza, 1992d ]. Th i s exp eri ment is not real l y an i ns t ance of a recu rs iv e
p r ogr am bu t it tou ch es recu rs iv e is s u es . His p rograms bel ong t o t h e
t h i rd cat egory wh ere t ermi nat i on is gu arant eed . I n recent work, Koza
d emons t r at ed t h e ev ol u tion of i t erat i on [Koza and A nd re, 1996b].
Time-Boun ded C ategories 1 and 2 abov e are examp l es of t i me-bou nd ed execu -
Execution tion, a tech niqu e t h at can be u s ed bot h wi t h i t erat i on and recu rs ion.
Th e next s ection examines th es e met h od s in more d ep t h . Ti me-
bou nd ed execu tion in GP is wh en a p rogram is l imited in h ow many
execu tion s tep s or t i me u ni t s it is al l owed t o p erf orm, or as a mil d er
res triction, if t h e p r ogr am is p u ni s h ed f or l ong execu tion t i mes .
10.2.9 Memory Mani pul ati on
Pr ogr ammi ng in mos t common comp u t er l angu ages s u ch as Pas cal ,
C , FO RTRA N, or A d a rel ies on t h e as s ignment of memory or s t ru c-
t u res in memory. A l l commercial comp u t ers are regis ter mach ines
10.2 Improving the Evolvability of Programs
t h at op erat e by as s igning v al u es t o memory or t o i nt ernal regis ters
of t h e C PU. Th i s means t h at ev en p u rel y f u nctional l angu ages wil l
end u p bei ng i mp l ement ed by memory as s i gnment . C ons equ entl y,
mani p u l at i on of memory and v ariabl es is an i mp or t ant concep t in
comp u t er s cience.
Th e earl ies t met h od f or ev ol u tion of comp u t er p rograms t h at was
ev al u at ed on a l arge s cal e - tree-bas ed GP - u s ed p rograms wi t h LI S P
s ynt ax. Th e reas on is t h at LI S P h as one of t h e s imp l es t s ynt axes of
any comp u t er l angu age. Th e s imp l er t h e s ynt ax t h e eas ier is it t o
ens u re t h at cros s ov er and mu t at i on res u l t in s yntactical l y correct
p rograms . Th e cros s ov er op erat or working wi t h LI S P mu s t in p rinci-
p l e ens u re onl y t h at t h e p arent h es es are bal anced . Th i s wil l res u l t in
s yntactical l y correct p rograms . A cros s ov er op erat or exch anging s u b-
trees is s u ch an op erat or: it al ways l eav es t h e nu mber of p arent h es es
bal anced in of f s p ring.
LI S P is a f u nctional l angu age in its p u res t f orm and h ence d oes
not u s e as s ignment. I n t h e t ree rep res enting a LI S P p r ogr am t h e
t ermi nal nod e v ariabl es al ways rep res ent t h e s ame v al u e. I n an im-
perative l angu age s u ch as C , a v ariabl e can be as s igned at d if f erent
moment s and wil l h ence corres p ond t o d if f erent v al u es . C omp l et e
LI S P s ys t ems giv e an interf ace t o as s ignment t h r ou gh s p ecial f u nc-
tions s u ch as t h e set fun ction f or as s ignment or s torage of v al u es .
As s i gnme nt of Vari abl es
Koza u s es a S e t - Va l u e f u nction t o s et t h e content of a s ingl e v aria-
bl e [Koza, 1992d ]. Th e v ariabl e is t h en incl u d ed in t h e t ermi nal s et
wh ere it can be read l ike any ot h er v ariabl e. I n ot h er GP p arad i gms ,
v ariabl es and s id e ef f ects are a more i nt egrat ed p ar t of t h e rep res en-
t at i on. I n mach i ne cod e GP, f or i ns t ance, each i ns t ru ct i on res u l ts in
t h e as s ignment of memory or regis ters . I t is a nat u r al s t ep f rom t h e
as s ignment of a v ariabl e t o t h e mani p u l at i on of ind exed memory.
Co mpl e x Da t a St ruct ures and Abs t r ac t Da t a Ty pe s
GP d if f ers f rom ot h er ev ol u tionary tech niqu es and ot h er "s of t com-
p u t i ng" tech niqu es in t h at it p rod u ces s ymbol ic inf ormation (i.e.,
comp u t er p rograms ) as ou t p u t . I t can al s o p roces s s ymbol ic inf or-
mat i on as i np u t v ery ef f icientl y. Des p ite t h i s u ni qu e s t rengt h , genetic
p rogrammi ng h as s o f ar been ap p l ied mos t l y in nu merical or Bool ean
p robl em d omai ns .
A GP s ys t em can p roces s f itnes s cas es cons is ting of any d at a t yp e
f or wh ich we can s u p p l y t h e neces s ary f u nction s et. Th es e cou l d be
s trings , bi t map images , trees , grap h s , el ements of nat u r al l angu age,
10 Advanced Genetic Programmi ng
or any ot h er d at a t yp e t h at we can p roces s wi t h comp u t er p rograms .
For i ns t ance, GP h as been u s ed t o ev ol v e mat h emat i cal p roof s wh ere
t h e f itnes s cas es are trees rep res enting s t at ement s abou t ari t h met i c
[Nord in and Banzh af , 1997a] and t o ev ol v e s ort i ng al gori t h ms op er-
at i ng on l is ts [Kinnear, Jr. , 1993b].
GP can al s o be u s ed t o ev ol v e its own abs t ract d at a t yp es . A
h u man p rogrammer working in a h igh -l ev el p r ogr ammi ng l angu age
can d ef ine h is or h er own abs t ract d at a s t ru ct u res f itting t h e p rob-
l em d omai n h e or s h e is working in. Dat a s t ru ct u res of ten h el p t o
s t r u ct u r e a p robl em and res u l t in h igh er qu al ity cod e. Langd on h as
s u cceed ed in ev ol v ing abs t ract d at a t yp es wi t h a GP s ys t em. He ar-
gu es t h at t h es e s t ru ct u res may h el p t o increas e t h e s cal abil ity of GP
[Langd on, 1995c]. A bs t ract d at a s t ru ct u res h av e al s o been s h own in
s ev eral cas es t o be s u p erior t o an u ns t r u ct u r ed , f iat ind exed memory
[Langd on, 1995a] [Langd on, 1996b].
I n Langd on' s work, abs t ract d at a s t ru ct u res are ev ol v ed f rom a
f l at ind ex memor y s imil ar t o t h e one u s ed by Tel l er. Th e s ys t em h as
a h and f u l of p rimitiv es at its d is p os al in ord er t o ad d res s and mov e
arou nd in t h e ind exed memory. Th e genome cons is ts of mu l tip l e trees .
Th e nu mber of trees is p red ef ined and corres p ond s t o t h e f u nctions
exp ect ed t o be neces s ary t o mani p u l at e t h e d at a s t r u ct u r e. Th e s tack
d at a s t ru ct u re, f or examp l e, h as f iv e trees in its genome, corres p ond -
ing t o t h e f iv e s tack mani p u l at i on op erat i ons t h at one wou l d l ike t o
ev ol v e (p u s h , p op , t op , makenu l l , emp t y) . A l l f u nctions are ev ol v ed
s imu l taneou s l y. C ros s ov er can exch ange s u bt rees f reel y bet ween t h e
d if f erent trees in t h e genome. Fi gu re 10.5 i l l u s t rat es t h e mu l t i p l e tree
s t r u ct u r e of t h e genome wi t h abs t ract d at a t yp es .
Cul t ural GP
S p ector and Lu ke p res ent an ap p roach t h at may be cal l ed "cu l t u ral
GP" [S p ector and Lu ke, 1996a] [S p ector and Lu ke, 1996b]. Th e p rin-
cip l e h ere is t o increas e GP p erf ormance by met h od s t h at are an ana-
l og of cu l t u ral l earning, i.e., of l earning by n on -gen etic inf ormation
trans f er bet ween ind iv id u al s . To t h at end , Tel l er' s i nd exed -memory
t ech ni qu e gets u s ed in a mod if ied f orm [Tel l er, 1994a] [Tel l er, 1993].
For s ome p robl ems , S p ector and Lu ke s h ow t h at t h e comp u t at i onal
ef f ort f or p robl em s ol v ing gets red u ced by emp l oying cu l t u ral GP.
I n t h e context of cu l t u ral GP, cu l t u re is v iewed as t h e s u m of al l
non-genetical l y trans f erred inf ormation. For i ns t ance, wh en a p ro-
gr am t r ans mi t s a nu merical v al u e t o anot h er p rogram, t h i s is an
i ns t ance of cu l t u re. Ref erring t o Dawkins [Dawkins , 1989], S p ect or
and Lu ke u s e t h e t er m meme t o d es ignate t h e cu l t u ral anal og of a
gene: a meme is a cu l t u ral inf ormation u ni t .
10. 2 I mpr ovi ng t he Evol vabil it y of Pr ogr a ms
E3
pop
0
push
0 /
X
empt y makenul l t op
x
< /
x
Figure 10.5
77ie multiple tree
structure of the genome
with abstract data types
GENOME
A key is s u e in t h e cont ext of cu l t u re is t h e i nt eract i on bet ween
ev ol u t i onary and cu l t u ral l earning. I t can be argu ed t h at :
t h e d is s emination s p eed of genetic inf ormation is s l ow comp ared
t o t h at of cu l t u ral inf ormation;
h ence, t h e gene p ool is more s tabl e comp ared t o t h e meme p ool .
C ons id ering t h es e p rop ert i es , t h e s ynth es is of bot h l earning met h od s
may be s u p erior t o an ap p roach u s ing eith er one of t h em. O ne may
h op e, f or i ns t ance, t h at benef icial memes wou l d s p read f as t and cou l d
get exp l oited by many ind iv id u al s , wh il e, d u e t o s el ection, d el eteri-
ou s memes - al s o s p read ing f as t - wou l d not "p ois on" t h e comp l et e
p op u l at i on.
Th e bas ic id ea beh i nd i mp l ement i ng cu l t u ral GP is t o l et al l ind i-
v id u al s h av e acces s t o t h e s ame ind exed memory. Th i s memory gets
initial ized once onl y, t h at is , wh en a ru n s t art s . Th at way it s erv es
as an inf ormation s torage with in and across generat i ons . I n p art i cu -
l ar, a cert ai n ind iv id u al may trans f er inf ormation t o its el f . I t wou l d
s tore inf ormation d u ri ng its ev al u ation on a cert ai n f itnes s cas e, and
it wou l d read t h i s inf ormation d u ri ng a s u bs equ ent ev al u ation on an-
ot h er f itnes s cas e. I t cou l d al s o trans f er t h e inf ormation t o anot h er
ind iv id u al of t h e s ame generation or t o an ind iv id u al of a s u bs equ ent
Indexed Memory
10 Advanced Genetic Programmi ng
generat i on. Th u s , t h e meme p ool (ind exed memory) wou l d ev ol v e
ov er t i me l ike t h e gene p ool .
S p ector and Lu ke emp irical l y inv es tigated t h e ef f iciency of cu l -
t u ral GP on s amp l e p robl ems f rom s ymbol ic regres s ion, control , and
artif icial intel l igence. Th ey f ou nd t h at in s ome cas es t h e comp u t a-
t i onal ef f ort was s ignif icantl y l ower wi t h cu l t u ral GP t h an wi t h ou t .
Th e met h od of cu l t u ral GP s u rel y is an interes ting ap p roach t h at
d es erv es f u rth er at t ent i on, s ince it rep res ents a s ignif icant extens ion
of GP toward a s of tware anal og of organic ev ol u tion t h at i ncorp orat es
more f eatu res t h an j u s t genetic l earning.
10.2.10 Strongly Typed Genetic Programming
Mos t mod er n p rogrammi ng l angu ages , s u ch as C-\h , h av e mech a-
nis ms p rev ent i ng t h e p rogrammer f rom mixing d if f erent d at a t yp es
u nintentional l y. For i ns t ance, t ryi ng t o p as s an integer argu ment
t o a f u nction t h at is d ecl ared a s t ri ng f u nction wil l res u l t in an er-
ror. I f t h e p rogrammer want s t o v iol ate t h e t yp es h e or s h e h as d e-
cl ared , h e or s h e mu s t s ay s o exp l icitl y. Bes id es h el p ing t h e p rogram-
mer t o av oid mis takes , th es e s trongl y t yp ed p rogrammi ng l angu ages
make t h e s ou rce cod e more read abl e. S trongl y t yp ed genetic p ro-
gr ammi ng ( S TGP) i nt rod u ces t yp ed f u nctions into t h e GP genome
[Montana, 1994]. Us ing t yp es migh t make ev en more s ens e in GP
t h an wi t h a h u man p rogrammer becau s e t h e GP s ys t em is comp l etel y
r and om in its recombi nat i on. Th e h u man p rogrammer h as a ment al
mod el of wh at h e is d oing, wh ereas t h e GP s ys t em h as no s u ch gu id -
ance. Typ e ch ecking al s o red u ces t h e s earch s p ace, wh ich is l ikel y t o
imp rov e t h e s earch .
Th e u s e of s trongl y t yp ed GP is mot i v at ed by t h e cl os u re p rop -
erty of t h e f u nction s et. A l l f u nctions in t h e ind iv id u al s mu s t be abl e
t o gracef u l l y accep t al l i np u t t h at can be giv en f rom ot h er f u nctions
in t h e f u nction s et. Th i s cou l d be r at h er d if f icu l t in real -l if e ap p l ica-
tions wi t h many d if f erent t yp es of inf ormation rep res ent ed as many
d if f erent d at a s t ru ct u res .
A common examp l e is a mix of Bool ean and nu meri c f u nctions .
Let u s s ay t h at we want t o ev ol v e a cu s t omer p rof il e f rom a cu s t omer
d at abas e. For i ns t ance, we wou l d l ike t o know t o wh ich cu s t omers
we s h ou l d mail ou r l ates t p rod u ct of f er. Th e f u nction s et cons is ts of
Bool ean f u nctions (A ND, OR, . . . ), ari t h met i c f u nctions (+, - , *, / ) ,
comp ari s on f u nctions (>, <, =) and cond itional s (I F THEN E LS E ).
We migh t want t o ev ol v e criteria s u ch as IF the latest customer order
is bigger than the average customer order times 10 OR IF the cus-
tomer is a regular costumer, THEN sen d him the offer. Th i s kind
of ru l e mixes nu merical and Bool ean inf ormation. I t p robabl y makes
10.3 Improving the Power of GP Search
| l i l
l ittl e s ens e t o recombine t h e two d if f erent s orts of d at a wi t h cros s ov er.
I nt erp ret i ng a nu merical as a Bool ean v al u e (0=TRUE ; l =FA LS E ) d oes
not make mu ch s ens e h ere and is not l ikel y t o imp rov e t h e s earch . I f
we i ns t ead u s e a s t rongl y t yp ed GP s ys tem, we can gu arant ee t h at
cros s ov er wil l s witch onl y two s u bt rees t h at r et u r n t h e s ame t yp e.
N
( IF) Figure 10.6
, / ~p\ A strongly typed GP
/ I \ individual
B N N
I n Fi gu re 10.6 we s ee h ow each l ink between t h e nod es in t h e
p rogram tree is t yp ed as eith er a Bool ean or a nu merical v al u e. Th e
comp aris on f u nctions t ake a nu merical and p rod u ce a Bool ean, t h e
ari t h met i cal f u nctions bot h t ake and p rod u ce nu merical v al u es , wh il e
t h e Bool ean f u nctions u s e onl y Bool ean i np u t s and ou t p u t s . C ond i-
tional s may be d ef ined in d if f erent ways . Th e l ef tmos t i np u t s h ou l d
be a Bool ean, wh il e t h e ot h er i np u t s and t h e ou t p u t are eith er com-
p l etel y Bool ean or comp l etel y nu merical . Fu nct i ons t h at can mani p -
u l at e s ev eral d if f erent d at a t yp es are cal l ed gen eric t yp es .
10.3 Improvi ng the Power of GP Search
O ne of t h e central is s u es in mach i ne l earning is : h ow d oes an al -
gori t h m mov e f rom p oint n in t h e s earch s p ace t o p oint n + 1? I n
GP, t h e bas ic GP op erat ors cros s ov er and mu t at i on are u s ed t o t h at
end . Genetic p r ogr ammi ng s earch can be imp rov ed by emp l oying ad -
d itional mech ani s ms , s ome of wh ich we p res ent bel ow. A mong t h em
are s of tware anal ogs of ontogeny and co-ev ol u tion as wel l as h ybrid s
bu il t f rom d if f erent s earch p arad i gms .
10.3.1 Ontogeny
Wh il e ev ol u tionary biol ogy is concerned wi t h p roces s es t h at res u l t
in genotyp ic ad ap t at i on t o an env i ronment , d ev el op ment al biol ogy
10 Advanced Genetic Programmi ng
inv es tigates a p roces s t h at mod if ies t h e s t ru ct u re and , t h u s , t h e be-
h av ior of an organis m d u ri ng its entire l if etime. Th i s p roces s is cal l ed
on togen y.
Many GP s ys tems ignore ontogeny al togeth er, becau s e it cer-
t ai nl y ad d s enormou s comp l exity t o t h e ev ol u tionary p roces s . Here
we s h al l d is cu s s th os e GP ap p roach es t h at make exp l icit u s e of on-
togenetic id eas . I t h as been s h own emp irical l y f or cert ai n p rob-
l ems t h at th es e s ys t ems imp rov e t h e s earch in GP. Th e i nt eres t ed
read er wil l f ind ad d i t i onal mat eri al in [Gru au , 1994a] [Tel l er, 1994a]
[I ba et al ., 1995a] [Zomorod ian, 1995] [Kel l er and Banzh af , 1996]
[S p ector and S tof f el , 1996b] [S p ector and S tof f el , 1996a].
De v e l o pme nt
From an abs t ract p oint of v iew, a s t r u ct u r e is t h e carrier of a f u nc-
tion. A n ind iv id u al in an ev ol u tionary al gori t h m is s u ch a s t r u ct u r e.
Th e i nt erp ret at i on of t h e s t ru ct u re in t h e context of a p robl em d o-
mai n d et ermi nes t h e f u nction t h at wil l be carried by t h at s t r u ct u r e.
For i ns t ance, t h i s s t ru ct u re can be a real -v al u ed v ector, a cel l u l ar
au t omat on ru l e, a 3D-wire-f rame mod el of a real object, a tree, a
network, et c. I n GP, t h e f u nction of an ind iv id u al is d ef ined by t h e
s emant i cs of t h e p rogram l angu age.
I n ou r op inion, d ev el op ment al ap p roach es t o GP t r y t o ad d res s
at l eas t one of t h e f ol l owing p robl ems :
How can t h e s earch be l ef t u ncons t rai ned , wh ereas t h e s ol u tions
need t o be h igh l y cons t rai ned t h r ou gh s ynt ax?
How can one u s e a comp act genetic rep res ent at i on t h at u nf ol d s
into a comp l ex ind iv id u al p rogram?
I s t h ere a way t o incl u d e t h e "env ironment" into t h e p roces s
of generat i ng comp l exity? C an t h e env i ronment ev en h el p in
organizing an ind iv id u al p rogram?
Dev el op ment al biol ogy, as one v ery i mp or t ant branch of biol ogy,
wil l p rov id e more ins igh ts into t h e ontogeny of an ind iv id u al , and GP
s t and s t o l earn a l ot f rom th os e mod el s . Not onl y GP bu t al s o ot h er
E A s wil l benef it as wel l . We ant i ci p at e th eories of d ev el op ment t o
h av e a cons id erabl e i mp act on genetic p r ogr ammi ng and ev ol u t i onary
al gori t h ms in general in t h e coming years .
A s one examp l e of wh at h as al read y been ach iev ed , we s h al l d is -
cu s s in t h e res t of t h i s s ection a mod el d u e t o S p ect or et al .
10.3 Improvi ng t he Power of GP Search
Ont oge ne t i c Pr o g r a mmi ng
S p ector and S tof f el [S p ector and S tof f el , 1996b] p res ent an ap p roach
t h ey cal l ontogenetic p rogrammi ng. By incl u d ing p r ogr am self-modifi-
cation op erat ors into t h e f u nction s et, a p rogram may ev ol v e t h at can
ch ange its s t r u ct u r e d u ri ng r u n t i me. S u ch a p rogram rep res ents an
anal og of an organis m t h at ch anges its s t r u ct u r e d u ri ng its l if etime,
f or i ns t ance, wh en it grows . A ch ange in t h e p rogram s t r u ct u r e may
mod if y t h e p r ogr am' s f u tu re beh av ior. S ince t h e s el f -mod if ication
op erat ors are el ements of t h e f u nction s et, t h e s el f -mod if ication of a
cert ai n p r ogr am may ev ol v e its el f .
O nt ogenet i c mod if ication of an ind iv id u al p rogram - v ers u s p h y- On togen y vs.
l ogenetic mod if ication of t h e p op u l at i on, wh ich is wh at ev ery GP Phylogen y
s ys t em d oes - may enh ance t h e p erf ormance of a p r ogr am u nd er cer-
t ai n ci rcu ms t ances . For i ns t ance, if d if f erent exp res s ions of a cert ai n
p rogram f eatu re are need ed ov er t h e p rogram' s r u n t i me, ontogenetic
p rogram mod if ication may yiel d it.
For an examp l e, t h e au t h or s d es cribe a p rogram p erf orming as
an ad v ent u re-game agent. Dep end i ng on t h e p rop ert i es of t h e game
env i ronment , d if f erent t act i cal agent beh av ior in d if f erent game s tages
may be h el p f u l in reach ing t h e s t rat egi c goal of t h e game. Th u s , a
d ev el op ment of t h e i nd i v i d u al may be need ed .
Dif f erent beh av iors of t h e s ame p rogram migh t be real ized , h ow- On togen y vs.
ev er, in a mu ch s imp l er way t h an by ontogenetic mod if ication, by Con dition als
u s ing cond itional s . O n t h e ot h er h and , ontogenetic mod if ication al -
l ows f or a p ot ent i al l y u nl i mi t ed nu mber of d if f erent beh av iors ov er
t h e r u n t i me and is th eref ore s ignif icantl y more f l exibl e.
S tof f el and S p ector u s e t h ei r own s ys t em cal l ed HiGP
[S tof f el and S p ect or, 1996] t o v al i d at e t h e ontogenetic ap p roach . A
Hi GP p r ogr am h as a l inear s t ru ct u re. Th e s el f -mod if ication op era-
tors are tail ored t o th is s t ru ct u re. S tof f el and S p ector d es cribe t h ree
s u ch op erat ors , al t h ou gh many ot h ers are p os s ibl e: s egment - cop y re-
p l aces a p rogram p ar t by t h e cop y of anot h er p ar t , s h i f t - l e f t and
s h i f t - r i g h t r ot at e t h e p rogram ins tru ction-wis e.
2
O n a p robl em of
binary s equ ence p red iction, ontogenetic p r ogr ammi ng h as enh anced
p rogram p erf ormance cons id erabl y.
2
I n f act, S p ector h as recentl y been f ocu s ing on rath er d if f erent ontoge-
netic op erators , incl u d ing an i ns t r u ct i on ins tru ction th at rep l aces its el f
or anoth er ins tru ction - with an ins tru ction obtained f rom a l ooku p ta-
bl e. He h as al s o been ad d ing f u nctions th at al l ow a p rogram to know
h ow "ol d " it is s o th at it can incorp orate timed d ev el op mental s trategies
[S p ector, p ers onal commu nication, Ju l y 1997].
10 Advanced Genetic Programmi ng
Th e concep t of ontogenetic p rogrammi ng can al s o be u s ed with
S -exp res s ion-bas ed p rograms , al t h ou gh t h e i mp l ement at i on is eas ier
f or l inear p rogram s t ru ct u res .
10. 3. 2 Adapt ive Parsimony Pressure
Zh ang and Miih l enbein [Zh ang and Miih l enbein, 1996] h av e s u gges ted
a s imp l e met h od f or ad ap t i v el y control l ing p ars i mony p res s u re d u r-
ing ev ol u tion. Th e met h od is s imp l e, wel l grou nd ed in t h eory and
emp irical l y v al i d at ed [Zh ang and Mu eh l enbein, 1995] [Bl ickl e, 1996].
Th e t h eoret i cal anal ys is of t h e concep ts d raws f rom t h e not i on of t h e
mi ni mal d es crip tion l engt h (MDL) p rincip l e [Ris s anen, 1984] and it
cons id ers t h e p rograms as Gau s s i an mod el s of t h e d at a. For d etail s
t h e read er may cons u l t t h e original s ou rces .
Let Ei{g) d enot e t h e error p rod u ced by a giv en ind iv id u al i in
generat i on g. S imil arl y, l et Ci(g) d enot e t h e comp l exity of an ind iv id -
u al i in generat i on g. For Ei(g) and Ci{g) t h e f ol l owing as s u mp t i ons
s h ou l d h ol d :
0 < Ei(g) < 1 (10.1)
Ci(g) > 0 (10.2)
Th en f itnes s is d ef ined as t h e error p l u s an ad ap t i v e p ars i mony t er m
a(g) t i mes comp l exity:
Fi(g) = Ei(g) + a(g) Ci(g) (10.3)
wh ere a(g) is d et ermi ned as f ol l ows . Let N be t h e s ize of t h e t rai ni ng
s et and e be t h e maxi mal error al l owed in an accep t abl e s ol u tion.
Th e e-f actor is giv en bef ore t rai ni ng and is an i mp or t ant ingred ient
of t h e met h od : it cou l d be s aid t o rep res ent t h e exp ect ed nois e in
t h e t rai ni ng d at a. Giv en th is , t h e p ars i mony f actor s h ou l d be ch os en
accord ing t o t h e f ol l owing equ at i on:
P{g)
J &*%$ i f l W*-D>e
\ ^i W
g
- i W, , , . (
g
)
ot he r wi s e
-
Ebestis 1) is t h e error of t h e bes t p erf orming ind iv id u al in t h e
p reced ing generation wh il e C'
be3t
(g)
ls a n
es t i mat i on of t h e s ize of t h e
bes t p rogram, es t i mat ed at generation (g 1). C
best
(g) is u s ed t o
normal ize t h e inf l u ence of t h e p ars i mony p res s u re.
Th i s met h od h as s ome s imil arities t o t h e way a h u man may s ol v e
a p robl em or p rogram an al gori t h m. Fi rs t , we are more d irected
toward f ind ing a s ol u tion t h at works , and wh en t h i s is ach iev ed we
mi gh t t r y t o s imp l if y t h e s ol u tion and t o make it more el egant and
generic. S imil arl y, t h e p ars i mony p res s u re d ecreas es wh il e t h e error is
10.3 Improving the Power of GP Search
f al l ing. I n cont ras t , wh en t h e f itnes s ap p roach es zero t h e p ars i mony
p res s u re d ecreas es t o encou rage s mal l , el egant, generic s ol u tions .
10.3.3 Chunking
A n al mos t obv iou s met h od t o imp rov e t h e ef f iciency of a GP s ys -
t em wh en d eal ing wi t h v ery l arge s ets of f itnes s cas es is t o d iv id e
t h e f itnes s cas e s et into s mal l er ch u nks .
3
A s ol u tion can t h en be
ev ol v ed f or each of t h e s mal l er ch u nks , and t h e ov eral l p rogram wil l
be s ome kind of concat enat i on of al l t h e s ol u tion generat ed f or t h e
ch u nks . For i ns t ance, cons id er t h e p rogrammat i c comp res s ion of im-
ages [Nord in and Banzh af , 1996], wh ere we t ry t o ev ol v e a GP p ro-
gram t h at p rod u ces a bi t map image - cl os e t o a t arget image - wh en
execu ted . Th i s ap p l i cat i on h as f itnes s cas e s ets of h u nd red s of t h ou -
s and s of i np u t / ou t p u t p airs , one f or each image p ixel . Th e image
can be ch u nked into s u bimages and a p rogram f or each s u bi mage can
be ev ol v ed . Th e ov eral l s ol u tion t o t h e comp res s ion p robl em is t h en
a l oop act i v at i ng t h e ev ol v ed res u l ts f or each of t h e ch u nks in t h e
correct ord er.
10.3.4 Co-Evolution
Th e idea beh i nd co-ev ol u tion of f itnes s f u nctions is t o get rid of t h e
s t at i c f itnes s l and s cap e u s u al l y p rov id ed by a f ixed s et of f itnes s cas es .
I n f itnes s co-ev ol u tion, al l f itnes s cas es are cons id ered t o be t h e re-
s u l t of an al gori t h m t h at can be s u bjected t o t h e s ame p rincip l es of
v ariation, ev al u ation, and s el ection as t h e p op u l at i on t o be ev ol v ed .
Th u s , a s ep arat e p op u l at i on encod ing a v ariety of f itnes s t es t s
f or t h e original p op u l at i on cou l d be co-ev ol v ed by al l owing t h e p er-
f ormance of t es t s t o inf l u ence th eir s u rv iv al p robabil ities . I n ot h er
word s , t h e env i ronment f or t h e s econd p op u l at i on is giv en by t h e
f irs t, and v ice v ers a. Becau s e bot h p op u l at i ons are al l owed t o ev ol v e,
and weaknes s es of t h e f irs t p op u l at i on are exp l oited by t h e s econd , as
are weaknes s es of t h e s econd p op u l at i on by t h e f irs t, an "arms race"
wil l d ev el op [Dawkins , 1987].
Fi gu re 10.7 s h ows a s ketch of d if f erent ev al u ation p at t er ns f or
bot h p op u l at i ons . I n (a), al l members of t h e f irs t p op u l at i on are s ys -
t emat i cal l y t es t ed agains t al l t h e members of t h e s econd . I n (b), al l
are t es t ed agains t t h e bes t p erf orming member of t h e ot h er p op u l a-
tion. I n (c), rand oml y s el ected members are t es t ed wi t h rand oml y
s el ected members f rom t h e ot h er p op u l at i on.
3
Th is u s age of th e word chun kin g s h ou l d not be conf u s ed with th at in
oth er f iel d s of artif icial intel l igence, f or ins tance, in connection with th e
S O A R s ys tem.
IrfiM 10 Advanced Genetic Programmi ng
(a) (t
Figure 10.7
Three scenarios for
competitive co-evolution
with two populations: (a)
all vs. all; (b) random;
(c) all vs. best. Similar
patterns can be used
within one population,
(from [Sims, 1994])
Bot h p op u l at i ons wil l imp rov e t h ei r f itnes s in res p ons e t o t h e cri-
t eri a s et f orth in t h ei r res p ectiv e ev al u at i on f u nction, wh ich is al l owed
t o s h if t d ynami cal l y t o more s op h i s t i cat ed l ev el s . Hil l is [Hil l is , 1989]
[Hil l is , 1992], A ngel ine and Pol l ack [A ngel ine and Pol l ack, 1993] and
S ims [S ims , 1994] rep ort a cons id erabl e i mp rov ement in t h e d egree
of op t i mi zat i on reach ed wh en p erf ormance is j u d ged d ynamical l y.
Ronge [Ronge, 1996] h as exami ned t h e artif icial ant p robl em u nd er
t h e p rov is ion t h at trail s p rov id ing f ood p el l ets t o a p op u l at i on of
s earch ing ant s th ems el v es d ev el op t o es cap e t h e s earch ing ant s .
I n Janni nk [Jannink, 1994] p s eu d o-rand om nu mber generat ors
are co-ev ol v ed wi t h t es t ers . Tes ting p rograms t r y t o gu es s t h e s e-
qu ence of nu mbers generat ed by an al gori t h m. Th e p robl em h as
a l ong h i s t ory wi t h root s going back t o v on Neu mann and Mor-
gens t ern' s s eminal work [v on Neu mann and Morgcns t crn, 1944] on
game th eory. I t can be s h own t h at a r and om s t rat egy is t h e bes t
a p l ayer can ap p l y in ord er t o tes t anot h er p l ayer' s r and om s t rat -
egy. Th u s , bot h p op u l at i ons , p s eu d o-rand om nu mber generat ors and
p s eu d o-rand om nu mber t es t ers wil l be d riv en in t h e d irection of bet -
t er p s eu d o-rand om nu mber s eries .
C omp et i t i v e co-ev ol u tion can be s et u p ev en wi t h i n one p op u -
l ation. Ju il l e and Pol l ack [Ju il l e and Pol l ack, 1996] h av e rep ort ed
good res u l ts by p u t t i ng ind iv id u al s f rom one p op u l at i on into op p o-
s ite camp s f or a game. Wh at t h ey ai med at was t o reward d if f erential
f itnes s i ns t ead of abs ol u te f itnes s . Th eref ore, f itnes s was comp u t ed
u s ing t ou r nament s between ind iv id u al s , bu t onl y th os e f itnes s cas es
10.3 Improving the Power of GP Search
were cou nt ed on each s id e t h at were u ni qu e h its . A nu mber of t ou rna-
ment s were execu ted f or each ind iv id u al and t h e s cores were s u mmed
u p t o yiel d a f itnes s f or t h e ind iv id u al .
S o f ar, we h av e cons id ered comp et i t i v e co-ev ol u tion, wh ich h as
a l ong-s t and i ng t rad i t i on in p op u l at i on biol ogy u nd er t h e h ead i ng of
p r ed at or - p r ey mod el s . Howev er, coop erativ e co-ev ol u tion is anot h er
l egi t i mat e s trategy. Here, it is not t h e weaknes s of t h e cou nt erp art
t h at is exp l oited , bu t t h e s t rengt h of t h e oth er p op u l at i on t h at h el p s
imp rov e one' s f itnes s . S o each p op u l at i on s h ou l d benef it t h e ot h er
one, and its el f p rof it f rom t h e t h ri v i ng of t h e ot h er one. A typ i-
cal ap p l i cat i on is t h e co-ev ol u tion of s ol u tions t o a s earch p robl em
wi t h genetic s earch op erat ors t h at th ems el v es are al l owed t o ev ol v e
[Tel l er, 1996].
10.3.5 Hybrid Approaches
We not ed earl ier t h at t h ere are d if f erent ki nd s of l earni ng
4
in nat u r e -
genetic l earning, l earning f rom exp erience, and l earning f rom cu l t u re.
Many t yp es of l earning are going on s imu l taneou s l y. S ome res earch ers
h av e d ev el op ed h ybri d s ys t ems combining genetic l earning wi t h ot h er
t yp es of l earning.
We d is tingu is h two cl as s es of h ybrid ap p roach es . I n t h e f irs t cl as s ,
GP is bl end ed wi t h ot h er general -p u rp os e s earch al gori t h ms , s u ch as
s i mu l at ed anneal ing (S A ) or s toch as tic i t erat ed h il l cl imbing (S I HC ).
We wil l d is cu s s t h i s is s u e f irs t.
Lat er, we d is cu s s a s econd cl as s of h ybrid ap p roach es wh ere GP
is merged wi t h s p ecial -p u rp os e s earch al gori t h ms . Th e s p ecial ty l ies
in t h e f act t h at , giv en a cert ai n ch oice of t ermi nal s and f u nctions
(incl u d ing th eir s id e ef f ects ), v ariou s al gori t h ms can be emp l oyed t o
ad d exp l orativ e p ower t o GP.
GP and Ge ne r al - Pur pos e Search Al gor i t hms
Th i s s u bs ection cov ers combi nat i ons of GP wi t h ot h er al gori t h ms
f or general -p u rp os e s earch . Like GP, oth er general -p u rp os e s earch
al gori t h ms f or p r ogr am i nd u ct i on h av e t o d eal wi t h t h e f ol l owing
p robl ems :
Local mi ni ma
S ize of s earch s p ace
Th u s , t h e cl as s of al gori t h ms combi nabl e wi t h GP is res t ri ct ed . Ba-
s ical l y, al l t h e al gori t h ms t h at h av e been bl end ed with GA s are al s o
We take l earning in a natu ral s ys tem to be s ynonymou s with s earch in
an artif icial s ys tem.
I t f i U 10 Advanced Genetic Programmi ng
cand i d at es t o be bl end ed wi t h GP. Tabl e 10.1 s h ows wh ich tech niqu es
h av e been combined wi t h GP s o f ar.
S earch t ech ni qu e
s t och as t i c i t erat ed
h il l cl imbing
cu l t u ral t rans mi s s i on
Probl em d omai n
6-, 11-mu l tip l exer
s ort
bl ock s tacking
regres s ion
l awnmower
Wu mp u s agent worl d
S ou rce
[O ' Reil l y and O p p ach er, 1996]
[O ' Reil l y and O p p ach er, 1996]
[O ' Reil l y and O p p ach er, 1996]
[S p ector and Lu ke, 1996a]
[S p ector and Lu ke, 1996a]
[S p ector and Lu ke, 1996a]
Table 10.1
Combination or
comparison of GP with
other gen eral-purpose
G
p
a n d
Spe c i al - Pur pos e Search Al gor i t hms
search techniques
S p ecial -p u rp os e al gori t h ms are d es igned in t h e real m of a p art i cu l ar
p robl em d omai n. Th ey are i nt end ed t o p rov id e p robl em-s p ecif ic op -
erat i ons working onl y on a s p ecif ic rep res ent at i on of s ol u tions . Th ei r
ad v ant age is t h at t h ey work ef f icientl y and f as t; on t h e ot h er h and ,
t h ey u s u al l y s u f f er f rom being l ocal s earch tool s t h at can be eas il y
t r ap p ed by l ocal mi ni ma. I t is h ere t h at GP of f ers a remed y.
GP can benef it h eav il y f rom an ins ertion of ef f icient l ocal s earch
op erat i ons ; s ee Tabl e 10.2. I ba et al . [I ba et al ., 1994] h av e d one a
s t u d y on t h e p robl em cl as s of Bool ean p robl ems . Th e ord i nary GP
ap p roach t o Bool ean p robl ems is au gment ed by a s p ecif ic l ocal s earch
p roced u re t h at d oes not ch ange t h e tree s t r u ct u r e of t h e ind iv id u al s
bu t p eriod ical l y emp l oys wh at t h ey cal l a rel abel ing of nod es . E v ery
now and t h en, t h e entire p op u l at i on is s u bj ect ed t o t h i s rel abel ing,
wh ere t h e nod es of al l trees are exch anged wi t h th os e nod es t h at
gu arant ee op t i mal p erf ormance, giv en t h e s t r u ct u r e of t h e t rees . Th i s
l ocal al gori t h m is t h e ad ap t i v e l ogic network al gori t h m f irs t p u bl i s h ed
in 1979 by A r ms t r ong et al . [A rms trong and Gecs ei, 1979].
Th e key id ea of th eir GP s ys t em is t o u s e a l ocal s earch p roced u re
p eriod ical l y t o imp rov e al l trees of t h e p op u l at i on s imu l taneou s l y.
Th u s , s t r u ct u r ed ad v ant ages are not l os t d u e t o ov ers p ecif ication.
I ba et al . [I ba et al ., 1994] rep ort f av orabl e res u l ts f or l ow p eri od s of
2- 3 generat i ons bef ore an ad ap t i v e l ogic network al gori t h m is ap p l ied
in t h e p op u l at i on: wi t h mu ch s mal l er p op u l at i ons or tree d ep t h s , a
p erf ect s ol u tion can be f ou nd . Up t o 50 t i mes f ewer ev al u ations h av e
t o t ake p l ace f or t h i s h ybri d GP as comp ared t o conv entional GP.
I n a s econd comp aris on, I ba et al . u s ed t h e GMDH al gori t h m
[I ba et al ., 1994] f or rel abel ing nod es in a s ys t em id entif ication p rob-
l em. We exp l ained t h i s ap p roach in more d et ai l in C h ap t er 9. Th e
10.3 Improving the Power of GP Search BcllH
S earch tech niqu e
A LN
GMDH
Probl em d omain
6-,11-mu l t
6-,11-mu l t, non-s tationary
ev en 3,4,5 p arity
E meral d 's robot worl d
regres s ion: Heron f ormu l a
Gl as s -Mackey time s eries p red iction
p attern recognition
S ou rce
[I ba et al ., 1994]
[I ba et al ., 1994]
[I ba et al ., 1993]
[I ba et al ., 1993]
[I ba et al ., 1994]
[I ba et al ., 1995a]
[I ba et al ., 1995b]
p robl em of s ymbol ic regres s ion of th e Heron f ormu l a
S =
(a + b + c)(a + b - c)(a - b + c) ( - o + b + c)
16
(10.4)
Table 10.2
Combination of GP with
special-purpose search
techniques. ALN =
adaptive logic network
algorithm
was s u cces s f u l l y s ol v ed with 10 times f ewer ev al u ations th an in con-
v entional GP [I ba et al ., 1994].
A s we h av e s een in th e GA commu nity, we can exp ect th at oth er
l ocal s earch meth od s wil l be emp l oyed togeth er with GP to yiel d
better res u l ts th at cou l d not h av e been ach iev ed by eith er meth od
al one.
Exercises
1. Giv e two l i mi t at i ons t o t h e bas ic GP ap p roach .
2. Des cribe two met h od s f or p aral l el izing GP.
3. Wh at is s t och as t i c s amp l ing?
4. Name t h ree mod u l ari zat i on tech niqu es .
5. Des cribe t h e bas ic A DF tech niqu e. Wh at is an arch i t ect u re
al t eri ng op erat i on?
6. Wh at is s imil ar and wh at is d if f erent between t h e encap s u l at i on
met h od and t h e mod u l e acqu is ition met h od ?
7. Giv e two examp l es of h ow t o d o t i me-bou nd ed execu tion.
8. How d oes a s trongl y t yp ed GP s ys t em work?
9. Giv e two examp l es of comp et i t i v e co-ev ol u tion in p op u l at i ons .
Wh at is coop erativ e co-ev ol u tion?
10. Wh i ch concep t s of d ev el op ment al biol ogy cou l d be incl u d ed in
GP?
11. Wh at is t h e id ea beh i nd h ybrid izing GP wi t h ot h er al gori t h ms ?
Giv e two examp l es . ~
!
"-
;
' "
?
' ' ,
:
- "
Further Reading
P. J. A ngel ine and K. E . Ki nnear, Jr . (ed s .),
A DVA NC E S I N GE NE T I C P RO GRA MMI NG 2.
MI T Pres s , C ambri d ge, MA , 1996. . , . ... .,
J. R. Koza, : : ^
GE NE T I C P RO GRA MMI NG I I . -' '
:
*
MI T Pres s , C ambri d ge, MA , 1994.
;
'
! :
' - {' > '
J. R. Koza et al .,
GE NE T I C P RO GRA MMI NG 1997. P RO C E E DI NGS O F THE S E C O ND
A NNUA L C O NF E RE NC E .
;
.
Morgan Kau f mann Pu bl i s h ers , S an Francis co, C A , 1997.
11 Impl ementation
Making Genetic
Programming Work
C ontents
11. 1 Why Is GP so Computationally Intensive? . . 310
11.1.1 Why Does GP Use so Much CPU Time? 311
11.1.2 Why Does GP Use so Much Main Memory? 312
11. 2 Computer Representation
of Individuals 314
11.3 Implementations Using LISP 316
11.3.1 Lists and Symbolic Expressions 316
11.3.2 The "How to" of LISP Implementations 317
11.3.3 The Disadvantages of LISP S-Expressions 318
11.4 Some Necessary Dat a Structures 319
11.4.1 Arrays 320
11.4.2 Linked Lists 321
11.4.3 Stacks 324
11.5 Implementations Wi t h Arrays or Stacks . . . 325
11.5.1 Postfix Expressions with a Stack 325
11.5.2 Prefix Expressions with Recursive Evaluation . . . 327
11.5.3 A Graph Implementation of GP 328
11. 6 Implementations Using Machine Code . . . . 330
11.6.1 Evolving Machine Code with AIMGP 330
11.6.2 The Structure of Machine Code Functions 333
11.6.3 Genetic Operators 334
11.7 A Guide to Parameter Choices 334
11 Implementation Making Genetic Programming Work
r Th i s ch ap t er ad d res s es f u nd ament al "h ow t o" is s u es of GP. A GP
s ys t em h as t o s tore rep res ent at i ons of t h e ind iv id u al s it is ev ol v ing,
p erf orm genetic op erat i ons u p on t h em, i nt erp ret t h e s t ored ind iv id u -
al s as p rograms , and p erf orm f itnes s cal cu l ations u s ing t h e i nt erp ret ed
ind iv id u al s . C od i ng a GP s ys t em t h at is f as t, memory ef f icient, eas il y
mai nt ai nabl e, p ort abl e, and f l exibl e is a d if f icu l t t as k. A s a mat t er
of f act t h ere are many trad eof f s , and t h i s ch ap t er wil l d es cribe h ow
major GP s ys t ems h av e ad d res s ed th os e trad eof f s .
Th e ch ap t er wil l d is cu s s t h e f ol l owing s u bjects :
1. We wil l p res ent examp l es t o s h ow wh y GP u s es C PU cycl es
and memory s o p rof u s el y. Th i s is t h e central p robl em f aced by
GP p rogrammers . I n t h e examp l es of C PU and memory u s e,
t h e nu mbers we p res ent are ap p roxi mat e and cou l d v ary s u b-
s t ant i al l y f rom s ys t em t o s ys t em and f rom mach i ne t o mach i ne.
Th e p u rp os e of t h es e nu meri c examp l es is t o exp l ain and t o u n-
d erl ine t h e magni t u d e of t h e d if f icu l ties t h at mu s t be f aced in
GP.
2. We wil l d es cribe s ys tematical l y v ariou s l ow-l ev el rep res ent a-
t i ons of ev ol v ing p rograms . Th e t h ree p rincip al mod el s t h at
h av e been u s ed f or s toring GP ind iv id u al s d u ri ng ev ol u tion are
(LI S P) l is ts , comp il ed l angu age (s u ch as C + + ) d at a s t ru ct u res ,
and nat i v e mach i ne cod e. We wil l d is cu s s h ow t h ey h av e been
i mp l ement ed and wh at t h e rel ativ e ad v ant ages and d is ad v an-
t ages are. . . ,_.
h
. ,
r
3. We wil l giv e an ov erv iew of t h e p ar amet er s t h at mu s t be s et
d u r i ng GP ru ns and s u gges t ru l es of t h u mb f or s et t i ng t h os e
p ar amet er s .
Th e t h r ead t h at wil l r u n t h r ou gh t h e entire ch ap t er is t h at GP
p rograms need s p eed , f l exibil ity, p ortabil ity, and ef f icient u s e of mem-
ory, bu t t h at t h ere are trad eof f s among th es e goal s . I nev itabl y, in
d is cu s s ing trad eof f s , t h e au t h ors wil l of ten p oint ou t wh at may s eem
t o be a d rawback of a p art i cu l ar ap p roach . I n d oing s o, t h ey d o
not mean t o criticize t h e d ecis ion t h at l ed t o th es e ap p roach es or t o
d is cou rage t h ei r u s e.
11.1 Why Is GP so Computati onal l y Intensive?
A brief exami nat i on of t h e nat u r e of GP wil l make it cl ear wh y GP is
s o v ery intens iv e in its u s e of C PU t i me and memory. Th r ee f actors
are at work.
11. 1 Why Is GP so Computationally Intensive?
1. Large Populations
GP ev ol v es a p op u l ation or p op u l ations of ind iv id u al s . Typ ical
p op u l ation s izes range between 500 and 5000. Bu t th ey can be
mu ch l arger to good ef f ect. I n Koza's p aral l el imp l ementation
on 64 Power PC s , p op u l ations in exces s of 600 000 ind iv id u al s
h av e been ev ol v ed s u cces s f u l l y [A nd re and Koza, 1996b]. O ne
of ou r own exp eriments went u p to p op u l ation s izes of 1 000 000
ind iv id u al s in A I MGP.
2. Large Individual Programs
GP works with v ariabl e l ength ind iv id u al s (p rograms ). Th is
f act f requ entl y res u l ts in l arge GP p rogram s izes f or two rea-
s ons . Firs t, th e p robl em to be s ol v ed of ten ap p ears to requ ire
reas onabl y l ong s ol u tions . S econd , inv ariabl y th e p robl em of
bl oat occu rs d u ring GP ru ns . Mu ch of th at p robl em is con-
nected to th e accu mu l ation of introns in th e GP ind iv id u al s .
Th e growth of introns is u l timatel y exp onential d u ring a GP
ru n u nl es s control l ed .
3. Many Fitness Evaluations
A l mos t al l of th e time cons u med by a GP ru n is s p ent p er-
f orming f itnes s ev al u ations . Fitnes s ev al u ations are neces s ary
becau s e th ey p rov id e th e metric by wh ich GP p erf orms s el ec-
tion on th e p op u l ation. To u nd ers tand wh y f itnes s ev al u ations
are s o C PU intens iv e we h av e to ad d two more f actors . Firs t,
GP f itnes s ev al u ations typ ical l y take p l ace u s ing a training s et
of f itnes s cas es . Th e s ize of th e training s et v aries enormou s l y,
d ep end ing on th e p robl em - f rom 50 to 5000 or more f itnes s
cas es is not u nu s u al . S econd , ev ery GP ind iv id u al is normal l y
ev al u ated on each f itnes s cas e in each generation.
11.1.1 Why Does GP Use so Much CPU Ti me?
Let u s l ook at wh at th es e th ree f actors mean f or C PU u s e d u ring
a s amp l e GP ru n. O u r s amp l e ru n wil l l as t G 50 generations
and h av e a training s et of F = 200 f itnes s p op u l ation s ize of
P = 2000 and an av erage ind iv id u al s ize th at grows f rom (Ni
n
n ) = 50
nod es to (N
max
) = 800 nod es d u ring th e ru n d u e to bl oat. We as s u me
each of th e nod es wil l be ev al u ated d u ring ev al u ation.
E v en in th is av erage-s ize ru n, th e d emand on th e p roces s or is
v ery s u bs tantial . For examp l e, in th e initial generation of th is ru n,
each ind iv id u al mu s t be ev al u ated f or each training ins tance. I n oth er
word s , f or each ind iv id u al in th e p op u l ation in th e f irs t generation,
(Ni
n
it) x F = 10
4
nod es mu s t be execu ted . To p erf orm f itnes s ev al -
u ation d u ring th e f irs t generation, th e GP s ys tem mu s t ev al u ate al l
11 I mp l e me n t a t i on Ma k i n g Genet ic Pr og r a mmi n g Wor k
ind iv id u al s . S o, t h e GP s ys t em mu s t execu te {N
in it
) x F x P 2 10
7
nod es j u s t t o ev al u ate t h e ind iv id u al s in t h e f irs t generat i on. Th ere-
f ore, 10
8
nod e ev al u ations wou l d be requ ired f or t h e f irs t 5 generat i ons
of t h e examp l e ru n. Tabl e 11.1 s h ows h ow t h i s nod e nu mber grows
as bl oat s ets in.
Generations
0 - 4
5 - 9
1 0 - 14
15 - 19
20 - 24
25 - 29
30 - 34
3 5 - 3 9
40 - 44
4 5 - 4 9
A v e. no. of nod es
p er ind iv id u al
50
50
100
100
200
200
400
400
800
800
Nod es ev al u ated
(mil l ions )
100
100
200
200
400
400
800
800
1,600
1,600
C u m. nod es ev al u ated
(mil l ions )
100
200
400
600
1,000
1,400
2,200
3,000
4,600
6,200
Table 11. 1
Example of node
calculations with a
population of 2000 GP
individuals
By t h e 50th generation, t h e GP s ys t em wil l h av e p erf ormed ov er
6 10
9
nod e ev al u ations ! Had we u s ed t h e v ery l arge p op u l at i on s ize
(600000) emp l oyed by A nd re and Koza, t h e nu mber wou l d h av e been
1.86 10
12
nod e ev al u ations j u s t t h r ou gh generat i on 50. I t s h ou l d ,
th eref ore, come as no s u rp ris e t h at GP p rogrammers h av e l abored
h ard t o make GP nod e ev al u ation as ef f icient and f as t as p os s ibl e.
Limits of Efficient
Memory Use
11.1.2 Why Does GP Use so Much Mai n Memory?
Th e h igh C PU t i me cons u mp t i on is not t h e onl y p robl em. GP al s o
cons u mes a l ot of memory. I d eal l y, ev ery GP ind iv id u al s h ou l d be
s tored in RA M in as comp act a manner as p os s ibl e. Fu rt h er, t h at
comp act rep res ent at i on s h ou l d make ap p l i cat i on of genetic op erat i ons
s imp l e and i nt erp ret at i on of t h e ind iv id u al as a p rogram eas y and f as t.
Need l es s t o s ay, it is not qu i t e t h at eas y. We wil l f irs t t ake a l ook at
t h e p ract i cal l imit of ef f icientl y rep res enting an ind iv id u al in memory.
Th en we wil l s u gges t s ome of t h e p robl ems t h at h av e p rev ent ed GP
p rogrammers f rom reach ing t h at id eal .
A comp il ed comp u t er p rogram is no more t h an a s equ ence of in-
s t ru ct i ons in nat i v e mach i ne cod e. Proces s or d es igners h av e s p ent
years comp res s ing a l arge amou nt of inf ormation into t h e nat i v e ma-
ch ine cod e f ormat d es igned f or t h ei r p roces s or. Th u s , we may s af el y
regard t h e amou nt of memory t h at wou l d be u s ed by a GP ind iv id u al ,
11.1 Why Is GP so Computati onal l y Intensive?
exp res s ed as nativ e mach ine cod e, as th e p ractical minimu m amou nt
of memory th at mu s t be d ev oted to an ind iv id u al . A 100-nod e in-
d iv id u al wou l d occu p y 400 bytes of memory, exp res s ed as mach ine
cod e, as s u ming th at each nod e is equ iv al ent to and may be exp res s ed
as one 32-bit mach ine cod e ins tru ction.
Mos t GP s ys tems d o not begin to ap p roach th e ef f iciency of mem-
ory u s age th at is imp l icit in a mach ine cod e rep res entation of a p ar-
ticu l ar p rogram. Th is migh t s eem u nu s u al . We are, af ter al l , tal king
abou t genetic programs. Bu t with one excep tion, genetic p rograms
are n ot s tored in memory d irectl y as mach ine cod e. Rath er, mos t GP
s ys tems rep res ent th e ind iv id u al s /p rograms s ymbol ical l y in s ome s ort
of h igh -l ev el d ata s tru ctu re. Th at d ata s tru ctu re is interp reted by th e
GP s ys tem as a p rogram wh en it is time to cond u ct a f itnes s ev al u a-
tion. Th e d ecis ion to rep res ent th e GP ind iv id u al in d ata s tru ctu res
th at are l es s ef f icient memory-wis e is of ten a d el iberate trad eof f mad e
by th e s of tware d es igner to ef f ect, f or ins tance, eas ier ap p l ication of
th e genetic op erators or p ortabil ity.
A n examp l e wil l be u s ef u l . O ne s tru ctu re of ten u s ed in GP s ys -
tems is an exp res s ion tree. E s s ential l y, each nod e in an ind iv id u al is
s tored in an array or a l inked l is t th at id entif ies wh at f u nction th e
nod e rep res ents and wh ere th e nod e gets its inp u ts f rom. Both th e
f u nction and th e inp u ts are id entif ied with p ointers . I n mod ern p ro-
gramming l angu ages , p ointers cons u me, s ay, f ou r bytes of memory.
If th e av erage arity of th e nod es in an ind iv id u al is two, th en it takes ,
on av erage, th ree p ointers to rep res ent each nod e - two p ointers to
p oint to th e inp u t nod es and one p ointer f or th e f u nction rep res ented
by th e nod e. For a 100-nod e GP ind iv id u al , th eref ore, it wou l d take
at l eas t 1200 bytes of memory to rep res ent th e ind iv id u al s ymbol i-
cal l y rath er th an in mach ine cod e. A s a p ractical matter, more is
neces s ary - 1600 bytes wou l d be a cons erv ativ e es timate.
We may now l ook at th e ap p roximate memory requ irements of
th e s ame examp l e ru n th at we d is cu s s ed in th e abov e tabl e. I n th e
f irs t generation, a p op u l ation of P 2000 ind iv id u al s wou l d occu p y
(Nin a) x P x 16 bytes = 1.6 megabytes . Bu t, by th e 50th generation,
th e p op u l ation av erages (N
max
) = 800 nod es f or each ind iv id u al and
wou l d occu p y arou nd (N
max
) x P x 16 bytes = 25.6 megabytes of
memory. Th is exceed s th e memory av ail abl e on many mod ern com-
p u ters f or an ap p l ication. Th u s , th e ru n wou l d d egenerate into d is k
s wap p ing.
Th ere are two p rominent ef f ects of extens iv e memory u s e:
1. Memory access is slow
E v ery byte of d ata u s ed to d es cribe an ind iv id u al d u ring ev o-
l u tion cau s es th e GP s ys tem to s l ow d own. E v ery time th e
A Memory Usage
Example
Effects of Extensive
Memory Use
11 Impl ementati on Maki ng Genetic Programmi ng Work
p roces s or mu s t l ook t o RA M f or d at a, t h e p roces s or u s u al l y
h as t o s t op and wait s ev eral cycl es - s ay it av erages t h ree cy-
cl es waiting f or a res p ons e f rom RA M. I f each nod e is d ef ined
by 16 byt es of d at a h el d in RA M, it t akes f ou r RA M acces s es
t o get t h at d at a on a 32-bit mach i ne. Th i s means it takes ap -
p roxi mat el y twel v e cycl es of t h e p roces s or t o get th os e 16 byt es
of d at a f rom RA M. Du ri ng t h at t i me, t h e p roces s or cou l d h av e
execu ted at l eas t twel v e i ns t ru ct i ons . Giv en th es e as s u mp t i ons ,
t h e r u n in t h e abov e t abl e wou l d h av e requ ired 74.4 bil l ion p ro-
ces s or cycl es j u s t t o acces s t h e RA M f or l oad ing nod es .
1
2. Gar bage col l ect i on
Th ere is a more s u bt l e memory p robl em cau s ed by many GP
rep res ent at i on s ch emes l ike LI S P l is t s ys t ems and C t ree s ys -
t ems . Th at p robl em is garbage col l ection. O ne of t h e common
f eatu res s h ared by s ys t ems i nt erp ret i ng C and by LI S P l is ts is
t h at memory is being cons t ant l y al l ocated and d eal l ocat ed f or
t h e nod es and t h e el ements of t h e l is ts . Wh en s mal l ch u nks
of memory are being al l ocated and d eal l ocated cons tantl y, it
l ead s t o RA M t h at res embl es S wis s ch ees e, wh ere t h e h ol es in
t h e ch ees e rep res ent av ail abl e RA M, and t h e ch ees e its el f rep -
res ents al l ocated RA M. O v er t h e cou rs e of ev al u ating s ev eral
bil l ion nod es d u ri ng a GP ru n, one wou l d exp ect a l ot of s mal l
h ol es t o d ev el op in t h e ch ees e: t h e memory gets fragmen ted.
Th u s , it gets increas ingl y h ard er t o f ind contigu ou s memory
ch u nks l arge enou gh f or h ou s ing cert ai n d at a s t ru ct u res .
Deal ing wi t h f ragmented memory is a t as k known as garbage
collection , a p ract i ce of mov ing t h e "ch ees e" arou nd in RA M
s u ch t h at one gets l arge "h ol es " again. Th i s p roces s may be
v ery t i me cons u ming. Th i s p robl em h as cau s ed res earch ers t o
aband on LI S P l is ts f or s torage of GP ind iv id u al s . I ns t ead , t h ey
u s e h igh -l ev el s ymbol ic d at a s t ru ct u res (arrays ) t o cont ai n s ym-
bol s t h at are t h en i nt erp ret ed as a p rogram.
11.2 Computer Representation
of Individuals
Ul t i mat el y, al l p rograms are j u s t inf ormation abou t wh at op erat i ons
on wh ich d at a t o p erf orm wi t h t h e p roces s or. A GP ind iv id u al may,
th eref ore, be v iewed as onl y a col l ection of inf ormation t h at s h ou l d
be i nt erp ret ed as a p rogram. Per h ap s t h e mos t i mp or t ant d ecis ion a
' Th i s cons id eration d oes not take into accou nt cach e ef f ects .
11.2 Computer Representation of Individuals
GP p rogrammer mu s t make is h ow to s tore th at inf ormation. Th is
d ecis ion af f ects h ow s imp l e it is to create and maintain genetic op -
erators , h ow f as t th e s ys tem ru ns , h ow ef f icient th e u s e of memory
is , and many oth er imp ortant as p ects of p erf ormance. Programmers
h av e rep res ented th e GP ind iv id u al d u ring ev ol u tion in th ree d if f erent
ways . Here is a brief d es crip tion of th e th ree ap p roach es and th eir
v ariou s ad v antages and d is ad v antages :
1. LISP lists
LI S P is a h igh -l ev el p rogramming l angu age th at is v ery p op u l ar
with artif icial intel l igence p rogrammers . Th e GP ind iv id u al in
th is ap p roach is rep res ented as a LISP l is t. LI S P l is ts are v ery
conv enient f or th e rep res entation of tree-bas ed p rograms - th ey
make cros s ov er and mu tation s imp l e to imp l ement. LI S P is
not s o conv enient f or genome s tru ctu res oth er th an tree-bas ed
s tru ctu res . A s l ong as th e p rogrammer s ticks to tree s tru ctu res ,
h owev er, a LI S P-bas ed s ys tem is eas y to maintain and makes
execu tion of th e ind iv id u al s imp l e s ince LI S P h as a bu il t-in
interp reter.
2. Dat a structures in compiled languages such as C , PA S -
C A L, or FO RTRA N
I n th is ap p roach , inf ormation abou t th e ind iv id u al is s tored
s ymbol ical l y in a d ata s tru ctu re s u ch as a tree, an array, or a
l inked l is t. Wh en it comes time to ev al u ate th e ind iv id u al f or
f itnes s , comp il ed p rograms are mu ch f as ter th an LI S P. O n th e
oth er h and , C d ata s tru ctu res , f or ins tance, are mu ch more l a-
bor intens iv e to p rov id e th an LI S P l is ts . Th is ap p roach requ ires
th e p rogrammer to write genetic op erators th at op erate on v a-
riabl e l ength s tru ctu res and th at u s u al l y engage in l arge-s cal e
p ointer manip u l ation - al ways a tricky tas k. Th e C p rogram-
mer mu s t al s o write and maintain h is or h er own interp reter to
conv ert th e s ymbol ic p rogram inf ormation s tored in th e d ata
s tru ctu re into a u s abl e p rogram.
3. Nati ve machine code
I n th is ap p roach , th e GP ind iv id u al s are s tored as arrays in
memory. Th e arrays actu al l y contain mach ine cod e ins tru c-
tions in th e f orm of binary cod e, wh ich op erate d irectl y on th e
C PU regis ters . Th ere is no h igh -l ev el interp retation or com-
p il ation s tep inv ol v ed s ince th e ins tru ctions get interp reted -
th at is , execu ted - d irectl y by th e p roces s or. Th is ap p roach
is v ery f as t (abou t s ixty times f as ter th an comp il ed C cod e
[Nord in and Banzh af , 1995b]) and is v ery comp act in its u s e of
memory. Howev er, p rogramming th is typ e of s ys tem is more
11 Impl ementati on Maki ng Genetic Programmi ng Work
d if f icu l t t h an eith er LI S P l is t or C d at a s t r u ct u r e s ys t ems , and
mu ch greater ef f ort is need ed t o as s u re p ortabil ity, f l exibil ity,
and mai nt ai nabi l i t y.
Th e next s ev eral s ections of t h i s ch ap t er wil l d is cu s s f ou r d if f erent
act u al i mp l ement at i ons of a GP s ys t em u s ing th es e t h ree d if f erent
rep res ent at i ons of t h e ind iv id u al . Th e emp h as i s h ere wil l be on t h e
d etail s of h ow t h e GP ind iv id u al s are s tored , execu ted , and cros s ed
over.
11.3 Impl ementati ons Using LISP
Becau s e of t h e p romi nence of Koza' s work, ref erences t o LI S P and
LI S P t yp e concep ts d omi nat e l arge p ar t s of t h e GP l i t erat u re. I n
f act, many res earch ers wh o d o not u s e LI S P s ys t ems nev erth el es s re-
p or t t h ei r res u l ts u s ing LI S P S -exp res s ions . LI S P is , in many ways ,
a nat u r al l angu age f or A I and tree-bas ed mach i ne l earning ap p l ica-
t i ons becau s e of its s imp l icity and its s t rong s u p p or t of d ynami c d at a
s t r u ct u r es .
2
I nd eed , ou r d is cu s s ion of t h e LI S P ap p roach wil l be mu ch
s imp l er t h an ou r d is cu s s ion of t h e C and mach i ne cod e ap p roach es
f or one reas on - mos t of t h e s u p p ort f or s toring and mani p u l at i ng
t ree s t ru ct u res is h and l ed by t h e LI S P l angu age its el f .
Bef ore we l ook at h ow LI S P i mp l ement at i ons of GP work, it wil l
be u s ef u l t o d ef ine a f ew t erms .
11. 3. 1 Lists and Symbol ic Expressions
A LI S P l is t is an ord ered s et of i t ems ins id e p arent h es es . For t h e
p u rp os e of t h i s work, a s ymbol ic exp res s ion (S -exp res s ion) may be
regard ed as a l is t. I n LI S P, ind iv id u al s are wri t t en and s t ored as S -
exp res s ions . Here is an examp l e of a v ery s imp l e S -exp res s ion, wh ich
cou l d be a s imp l e GP p rogram:
(xab) (11.1)
Th i s exp res s ion is equ iv al ent t o t h e al gebraic exp res s ion:
s;:.r:n " M i Yi ' OMi . .
(a x b) (11.2)
Th eref ore, if t h e v al u e of a is 2 and t h e v al u e of b is 13, t h e abov e
S -exp res s ion ev al u ates t o 26.
O th er res earch ers h av e d ev is ed GP s ys tems f or oth er h igh -l ev el l an-
gu ages s u ch as PRO LO G and MA THE MA TI C A . We wil l ad d res s th e LI S P
s ys tems h ere becau s e of th eir p rominence.
11.3 implementations Using LISP
S -exp res s ions can be more comp l ex th an th is s imp l e examp l e.
I n p articu l ar, p arenth es es may be nes ted . Note h ow th e abov e S -
exp res s ion is nes ted into th e S -exp res s ion bel ow:
(-(xaf c)c) (11.3)
Th is S -exp res s ion is equ iv al ent to th e al gebraic exp res s ion:
(axb)-c (11.4)
Th es e th ree equ iv al ent exp res s ions are s h own in Figu re 11.1.
Expression Tree
Figure 11. 1
A program statement as
an expression tree, an
S-expression, and an
algebraic expression
S-Expression
(- (* A B ) C )
Algebraic Notation
(A * B) - C
11.3.2 The "How to" of LISP Implementations
S -exp res s ions h av e s ev eral imp ortant p rop erties th at make th em u s e-
ful f or GP p rogrammers . To begin with , th e GP p rogrammer d oes
not need to write any cod e interp reting th e s ymbol ic inf ormation in
th e S -exp res s ion into mach ine cod e th at may be execu ted . Th e LISP
interp reter d oes th at f or th e p rogrammer.
Fu rth ermore, LI S P S -exp res s ions make it v ery eas y to p erf orm
genetic op erations l ike tree-bas ed cros s ov er. A n S -exp res s ion is its el f
an exp res s ion tree. A s s u ch it is p os s ibl e to cu t any s u btree ou t of an
l cU: l 11 I mp l e me n t a t i on Ma k i n g Genet ic Pr og r a mmi n g Wor k
S -exp res s ion by remov ing ev eryth ing between any p air of mat ch i ng
p arent h es es . Not e h ow t h i s works f or t h e S -exp res s ion in Fi gu re 11.1.
C ros s ing ov er t h e s u bt ree u nd er t h e x s ymbol is accomp l is h ed in an
S -exp res s ion by cl ip p ing ou t t h e s t ri ng ( x a b ) . Th e p roces s of
p erf orming t h i s op erat i on is s h own in Fi gu re 11.2.
Figure 11.2
Clipping out a subtree
from an expression tree
and an S-expression
Expression Tree
S-Expression
C)
(* A B )
i-a
C l ip p ing ou t a s u bt ree in LI S P is t h u s v ery s imp l e comp ared t o
p erf orming cros s ov er on a GP ind iv id u al t h at is h el d in a C array. E x-
ch anging s u bt rees d u ri ng cros s ov er is al s o s imp l e. I t is onl y neces s ary
t o make s u re t h at t h e p ort i on t o be cl ip p ed ou t of each S -exp res s ion
is between mat ch i ng p arent h es es in each ind iv id u al . Th en t h e two
s egment s are cl ip p ed and exch anged as s h own in Fi gu re 11.3.
Likewis e, mu t at i on is s imp l e. Th e s u bt ree (* a b) cou l d eas il y
be mu t at ed by ch anging t h e * t o a + in t h e S -exp res s ion. I n t h at
cas e, t h e res u l ting s u bt ree wou l d be ( + a b). Th e reas on f or t h i s
s imp l icity is t h at mani p u l at i ng t ree s t ru ct u res is s omet h i ng t h at LI S P
was d es igned t o d o.
11. 3. 3 The Disadvant ages of LISP S-Expressions
We h av e al read y ind icated abov e t h at LI S P S -exp res s ions can cau s e
memory p robl ems . Th i s is becau s e l is ts are cons t ant l y being creat ed
11.4 Some Necessary Data Structures
irn
Parents
(- (
( + d e ) f ) g )
Children
( - ( - ( + d e ) f ) c ) ( * ( * a b ) g )
and d es troyed d u ring ev ol u tion. A l th ou gh many f l av ors of LI S P h av e
bu il t-in garbage col l ection, GP may create garbage f as ter th an it can
be col l ected .
A noth er p robl em with LI S P is s p eed . C -bas ed GP is more th an
ten times as f as t as LI S P-bas ed GP. Final l y, al th ou gh LI S P l is ts p ro-
v id e th e ad v antage of s imp l e tree manip u l ation, LI S P d oes not h av e
th e s ame ad v antage in manip u l ating oth er GP typ e genomes s u ch as
a l inear grap h genome.
Figure 11. 3
Exchanging two subtrees
in LISP crossover
11.4 Some Necessary Data Structures
Many GP s ys tems tod ay are written in a comp il ed l angu age, wh ich
of ten is C . We h av e al read y d es cribed C s ys tems th at u s e p ointers
to l ink togeth er th e nod es of a tree. O th er res earch ers h av e u s ed a
qu ite d if f erent ap p roach in comp il ed l angu age GP. Th ey combine a
more l inear C d ata s tru ctu re s u ch as a l inked l is t or an array with
a s tack. Th is ch ap ter wil l f ocu s on imp l ementation is s u es in two of
th es e s ys tems :
1. Th e s ys tems d es cribed in [Keith and Martin, 1994], wh ich im-
p l emented tree-bas ed GP in an array/s tack arrangement, and
2. Tel l er's PA DO s ys tem wh ich imp l ements GP as a d irected grap h
of p rogram execu tion nod es th at are h el d in l inked -l is t s tru c-
tu res . PA DO al s o rel ies on a s tack to imp l ement th e s ys tem
[Tel l er and Vel os o, 1996].
Many read ers wil l al read y be f amil iar with arrays , l inked l is ts ,
and s tacks . Und ers tand ing th es e bas ic d ata s tru ctu res and h ow th e
11 I mp l e me n t a t i on Ma k i n g Genet ic Pr og r a mmi n g Wor k
memory f or th em is al l ocated and d e-al l ocated is es s ential to u nd er-
s tand ing th e remaind er of th is ch ap ter. If th e terms push, pop, poin ter
to n ext, and poin ter to prior are f amil iar to you , th en you may s kip
to th e next s ection.
/
11. 4. 1 Arrays
A n array is an ord ered l is t of items of th e s ame typ e with each of th e
items h av ing an ind ex. S u ch a typ e may be integer, real , or ch aracter,
f or ins tance. Figu re 11.4 s h ows a generic array and an array f il l ed
with integers .
Figure 11.4
Two ways of looking at
arrays
Index
Stored
Data *
Index
Stored
ntegers
0
Da t a l
0
13
Generic Array
1
Data 2
2 3
Data 3 Data 4
Array of Integers
1
22
2
1025
3
300
4
Data 5
4
97
To acces s an item, th e p rogrammer s imp l y u s es its ind ex. For
examp l e, to acces s th e f ou rth integer in th e array of integers s h own
in Figu re 11.4, th e p rogrammer cou l d write array [3] . O f cou rs e, th e
v al u e of ar r ay [3] in Figu re 11.4 is 300. I t s h ou l d be obv iou s th at a
GP ind iv id u al can be s tored in an array. I n f act, s ome GP s ys tems
d o ju s t th at.
Th ere are s ev eral p robl ems th at aris e in u s ing arrays f or s toring
GP ind iv id u al s :
Variable size individuals
A l th ou gh it is p os s ibl e in C-|\- to create arrays of u nd etermined
s ize, res izing arrays at ru n time requ ires a l ot of p rogramming
and memory al l ocation and d e-al l ocation. Th is is an imp or-
tant f actor in GP wh ere th e ev ol v ing ind iv id u al s are v ariabl e in
l ength . I f a p rogram h ol d s th e ind iv id u al s in th e GP ru n in ar-
rays , cros s ov er is cons tantl y ch anging th e s ize of th e ind iv id u al ,
al l ocating and d e-al l ocating memory. Th is can cau s e garbage
col l ection p robl ems .
i
Compl ex cros s ov er operators
Figu re 11.3 h as s h own h ow cros s ov er is p erf ormed in LI S P S -
exp res s ions . Note th at th e s izes of th e s u btrees th at are ex-
11.4 Some Necessary Data Structures
ch anged in t h at f igu re are d if f erent. Th ere is no obv iou s l y eas y
way, as t h ere is in LI S P, t o cl ip ou t p ar t of an array contain-
ing, s ay, f ou r el ements , and exch ange th os e f ou r el ements wi t h
f iv e el ement s t aken f rom anot h er array. Bot h arrays h av e t o
be res ized , wh ich imp l ies p rogrammi ng work and comp u t at i on
ov erh ead . We wil l s ee two d if f erent s ol u tions t o t h i s p robl em
bel ow.
Vari abl e a mo unt s of dat a p e r node
In GP, d if f erent nod es of ten h av e d if f erent nu mbers of i np u t s .
For examp l e, a Pl us nod e h as two i np u t s . O n t h e ot h er h and ,
an I f / Th e n / E l s e nod e h as t h ree i np u t s . Th i s makes an ar-
ray rep res ent at i on d if f icu l t t o keep t rack of , becau s e t h e Pl u s
nod e wil l need at l eas t t h ree array el ements t o s tore it (one
el ement t o id entif y t h e t yp e of f u nction and t h e ot h er two t o
id entif y t h e i np u t s t o t h e op er at or ) . Us ing t h e s ame l ogic, t h e
I f / Th e n / E l s e nod e wil l u s e u p at l eas t f ou r array el ements .
Th i s wou l d requ ire t h e GP p rogrammer t o ad d l ogic t o keep
t rack of wh at op erat ors are wh ere in t h e array, bot h f or cros s -
ov er and f or execu tion.
None of t h e abov e p robl ems is ins ol u bl e, and we wil l l ook at h ow
p rogrammers h av e ad d res s ed t h em. C ons is tent wi t h t h e t h eme of t h i s
ch ap t er, we concl u d e t h at al t h ou gh arrays are eas y t o mani p u l at e and
t o acces s , t h ere are trad eof f s in u s ing arrays t o h ol d GP ind iv id u al s .
11.4.2 Linked Lists
Th e d etail s of creat i ng and trav ers ing l inked l is ts are beyond t h e
s cop e of t h i s s ection. Howev er, it is i mp or t ant t o know wh at s u ch a
l is t l ooks l ike, becau s e l inked l is ts can p rov id e i mp or t ant f l exibil ity
in creat i ng a GP s ys t em, as we wil l s ee wh en we exami ne t h e PA DO
s ys tem.
A l inked l is t is a s equ ence of el ements . E ach el ement cont ai ns
s ome d at a. I n ad d i t i on, it cont ai ns a p oi nt er t o t h e next el ement
in t h e l is t and , s omet i mes , a p oi nt er t o t h e p rev iou s el ement in t h e
l is t. Tech nical l y, a p oi nt er is s imp l y an integer, s t ored at one p l ace in
memory, t h at id entif ies a s econd l ocation in memory. Us ing p oi nt ers ,
a p rogram can h op arou nd in memory in ord er t o acces s d at a in a
v ery f l exibl e manner. Fi gu re 11.5 s h ows a d ou bl y l inked l is t.
I t is obv iou s t h at , f rom any el ement in Fi gu re 11.5, t h e p rogram-
mer can mov e f orward or backward t o any oth er el ement in t h e l is t
j u s t by f ol l owing t h e p oi nt ers .
11 I mp l e me n t a t i on Ma k i n g Genet ic Pr og r a mmi n g Wor k
Figu re 11.5
A doubly linked list, a
versatile storage structure
for GP individuals
1
Node
i ,
N e x t
Prior
V
Node
Prior
N e x t * Node
I !
- Next f c> Node
Figure 11.6
Inserting GP nodes into a
linked list
A l inked l is t is a v ery f l exibl e t yp e of d at a s t r u ct u r e becau s e any
inf ormation may be at t ach ed t o an el ement. I t h as s ev eral ad v ant ages
and d i s ad v ant ages ov er arrays f or s toring GP ind iv id u al s :
E a s e i n r e s i z i ng
Res izing a l inked l is t requ ires onl y t h at memory be al l ocated or
d e-al l ocated f or t h e nod es t o be ad d ed or d el eted . For examp l e,
Fi gu re 11.6 s h ows h ow a nod e may be eas il y i ns ert ed i nt o t h e
mid d l e of a l inked l is t.
List Before Insertion
* Prior i i Pnor 2
- Next -
Prlor
- Next 1 - > Node
Insertion Point
Nodes to be Inserted
+- Prior 3 I
t
Next 4 > ^^ -
Prior 5 1
'1
- Next -
- Prior -
List After Insertion
Prior 3 -
- NexM
L - Prior S 1
Prior 2 -
Next 6 - * j Nods ^Next -
Th e nod e ins ertion is a s imp l e mat t er of reas s igning f ou r p oint-
ers (th e rel ev ant p oi nt ers are nu mbered s o t h at t h e ins ertion
may be cl earl y f ol l owed ). Th e onl y memory al l ocation t h at oc-
cu rs is t h e one f or t h e ins erted nod e. I t is equ al l y eas y t o cl ip
a nod e ou t of a l inked l is t.
11. 4 Some Necessary Dat a St r uct ur es
Simple to crossover
C ros s ov er between two l inked l is ts is s imp l er th an f or an array.
C ons id er Figu re 11.7. A l l th at is requ ired to cros s ov er th es e
two l inked l is ts is to rearrange th e p ointers between th e nod es .
Not onl y is th is s imp l er th an array cros s ov er, it is al s o mu ch
l es s l ikel y to cau s e garbage col l ection p robl ems th an th e u s e
of an array. Note th at both of th e l inked l is ts in Figu re 11.7
ch ange s ize af ter cros s ov er. A l inked l is t wou l d not, as wou l d
an array, h av e to create a new (and d if f erent s ized ) array f or
each ind iv id u al , al l ocate memory f or th em, trans f er th e d ata
f rom th e ol d arrays to th e new arrays , and th en d e-al l ocate th e
ol d arrays .
^-Pri oi
n.
Next -
- Prioi
Parents Before Crossover
Prior-
PrioF 1
F
t
- Next G
Pr i or 2
- Next H
Figure 11.7
Crossover between two
doubly linked lists
^-PriorI
Children After Crossover
Priot 1 I Pri or-
Ne: . Next-
Flexible in size of elements
We noted abov e th at an el ement in a l inked l is t can contain
wh atev er d ata may be d es ired . Th u s , f or an If/Then/Else
operator, one l inked l is t el ement can h av e f ou r items of d ata,
wh il e, f or a Pl u s op erator, th e l inked l is t el ement need s to carry
onl y th ree items of d ata. Th e corol l ary of th is is th at th e p ro-
11 Impl ementati on Maki ng Genetic Programmi ng Work
grammer may es tabl is h a one-to-one corres p ond ence between
t h e el ements of a l inked l is t and t h e p rogram op erat ors .
Fast i ns e r t i on/de l e t i on
A l inked l is t is f as ter t o ins ert into or d el ete f rom t h an an array.
De ma ndi ng i n me mo r y r e qui r e me nt s
A l inked l is t cons u mes more memory t h an an array rep res enta-
t i on becau s e t h e l at t er d oes not u s e p oi nt ers .
Sl ow acces s
A l inked l is t is s l ower t o acces s t h an an array. Th i s can be
v ery exp ens iv e d u ri ng f itnes s ev al u ations wh ere ev ery el ement
is acces s ed rep eated l y.
O f cou rs e, it is not neces s ary t o u s e eith er a l inked l is t or an array
onl y. Th e PA DO s ys t em u s es a l inked l is t t o s tore ind iv id u al s and t o
p erf orm genetic op erat i ons . Bu t it u s es an array s t r u ct u r e t o execu te
t h e ind iv id u al p rograms .
11.4.3 Stacks L _,.., <_-.T
Two of t h e s ys t ems t h at we wil l cons id er u s e a stack f or t emp or ar y
d at a s t orage. A s tack can be t h ou gh t of as an ev er-ch anging p il e of
d at a. Bot h t h e d at a i t ems and th eir nu mber ch ange in t h e p il e. A
s tack is a l ittl e l ike u s ing a p il e of books t o s tore you r books i ns t ead
of u s ing a bookcas e. You wou l d p l ace a book onto t h e p il e by p u t t i ng
it on t op of t h e t op book. O n t h e ot h er h and , you cou l d get t o any
book in t h e p il e by s u cces s iv el y t aki ng t h e t op book of f t h e p il e and
read i ng it u ntil you reach ed t h e book.
Wh a t s eems od d abou t t h i s arrangement is t h at you can onl y
get t o t h e t op book and you can onl y s tore a book by p u t t i ng it on
t op . Wh i l e a top -of -th e-p il e-onl y arrangement wou l d be an od d way
t o s tore books , it is a p owerf u l way t o s tore s h ort -t erm d at a d u ri ng
execu tion of a p rogram. Wh at we j u s t d es cribed is al s o known as
LIFO: Las t I n - Fi rs t O u t . Th i s acronym comes f rom t h e p r op er t y
of a s tack t h at t h e l as t i t em you p u t into - t h at is , on t op of - t h e
s tack wil l be t h e f irs t item you can remov e again.
I n t h e comp u t er, a s tack is an area of memory t h at h ol d s d at a
mu ch l ike t h e p il e of books s tores books . Wh en you push an i t em
ont o t h e s tack, t h e t op of t h e s tack now h ol d s t h at i t em f or l ater
u s e. Th at is l ike wh en you p u t t h e book on t op of t h e p il e of books .
Fi gu re 11.8 s h ows grap h ical l y h ow a p iece of d at a may be s tored by
being p u s h ed ont o t h e s tack f or l ater u s e.
Wh en you pop an i t em of f t h e s tack, you get t h e t op i t em t o u s e
in p r ogr am execu tion. Pop p i ng d at a of f a s tack is l ike t aki ng t h e t op
11. 5 I mp l e me n t a t i on s Wi t h Ar r ays or St acks
PROGRAM
INSTRUCTIONS
^^7 \
17
19
237
6
15
17
19
237
6
15
Figure 11.8
Push and pop operations
on a stack
STACK STACK
book of f t h e p il e. Fi gu re 11.8 s h ows an i t em being p op p ed of f t h e
s tack.
Tech nical l y, a s tack is real ized by u s ing a s tack p oi nt er p oi nt i ng
to t h e ad d res s in memory ad d res s s p ace wh ere t h e p res entl y newes t
v al u e res id es . Wi t h th es e bas ics in mi nd , we are now p rep ared t o
d es cribe v ariou s C -bas ed GP s ys t ems .
11.5 Impl ementati ons Wi t h Arrays or Stacks
I n 1994, Kei t h and Mar t i n l ooked at f iv e d if f erent ap p roach es t o p ro-
grammi ng GP in C + + [Keith and Mart i n, 1994]. We h av e al read y
l ooked brief l y at t h e tree ap p roach , wh ere ev ery nod e cont ai ns a
p ointer t o each of its i np u t nod es . Kei t h and Mar t i n al s o cons id -
ered two s ys tems wh ere t h e GP ind iv id u al s were s tored in an array
and t h e tree s t ru ct u re was imp l icit in t h e ord ering of t h e el ements of
th e array. O ne of t h es e ap p roach es u s ed a s tack and p os tf ix ord ering
to ef f ect t h e imp l icit tree s t ru ct u re. Th e ot h er u s ed p ref ix ord ering
and recu rs iv e ev al u ations of t h e next nod e t o accomp l is h t h e s ame
th ing.
11.5.1 Postfix Expressions wi t h a Stack
Pos tf ix ord ering occu rs wh en t h e op erat or f ol l ows its op erand s . For
examp l e, t h e f ol l owing p os tf ix ord ering of nod es f or ev al u ation:
wx x yz+ xSQRT (11.5)
MiVIM 11 I mp l e me n t a t i on Ma k i n g Genet ic Pr og r a mmi n g Wor k
is equ iv al ent t o t h e f ol l owing al gebraic exp res s ion:
A / ( W x x) x (y + z) (11.6)
O ne ad v ant age of p os tf ix ord ering is t h at , if one ev al u ates t h e
p os tf ix exp res s ion f rom l ef t t o righ t, one wil l al ways h av e ev al u ated
t h e op erand s t o each op erat or bef ore it is neces s ary t o p roces s t h e
op erat or. Th u s , one need not s p end t i me f ind ing t h e op erand s s o
t h at t h ey can be ev al u ated p rior t o t h e op erat or p roces s ing.
Kei t h and Mar t i n p rop os ed t h at one way t o rep res ent GP ind i-
v id u al s wou l d be t o h ol d a s ymbol ic rep res ent at i on of each op er at or
and op erand - t h e elemen ts of an exp res s ion - in an array in p os tf ix
ord er. Th e t op array in Fi gu re 11.9 s h ows h ow t h e abov e p os tf ix
exp res s ion wou l d ap p ear in an array.
3
Figure 11. 9
Postfix and prefix
expression representation
0
w
0
r
t
X
1
MUL
2
MUL
2
*
3
Y
3
z
4
Z
4
Y
5
*
5
MUL
6
MUL
6
X
7
sT
7
W
Postfix Evaluation
Stack Evaluation
Postfix Crossover
O ne qu es tion remains : wh ere d o i nt ermed i at e and f inal res u l t s
occu ring d u ri ng execu tion get s t ored ? For examp l e, el ement 0 ev al -
u at es t h e v al u e of t h e i np u t w. Bu t w is not need ed u nt i l af ter t h e
s ys t em h as al s o got t en t h e v al u e of x f rom el ement 1 of t h e array.
O nl y t h en is t h e s ys t em read y t o ev al u ate t h e p rod u ct of w and x as
requ ired by t h e mu l t i p l i cat i on op erat or in el ement 2 of t h e array.
A s tack is a s imp l e way t o ef f ect t h i s kind of s torage, and Kei t h
and Mar t i n d o exactl y t h at . Th e l ogic of ev al u at i on is s et u p s o t h at
v al u es are p u s h ed onto and p op p ed of f t h e s tack s o as t o mai nt ai n
t h e l ogic of t h e tree s t ru ct u re. For examp l e, el ement 0 in t h e array
rep res ent s t h e v al u e of t h e i np u t w wh ich is p u s h ed onto t h e s tack.
Th e s ame is t r u e f or el ement 1 wi t h res p ect t o i np u t x. E l ement 2
rep res ent s p op p i ng two v al u es f rom t h e s tack (w and x), mu l t i p l yi ng
t h em and p u s h i ng t h e res u l t ont o t h e s tack. Now t h e p r od u ct of w
and x is s af el y s tored in t h e s tack f or l ater u s e as an i np u t . E xecu t i on
p roceed s in t h at manner righ t d own t h e array.
Th ere is no intu itiv e LI S P-l ike way t o p erf orm cros s ov er in t h i s
p os tf ix arrangement . Take a moment and t ry t o f igu re ou t a general
3
Th e p rogrammer wou l d p robabl y not u s e s ymbol s l ike l etters and
s trings - MUL, f or ins tance - th at we h av e u s ed . Rath er, each el ement
11.5 Impl ementati ons Wi t h Arrays or Stacks BckH
ru l e t h at wou l d al ways cros s ov er v al id s u bexp res s ions and is as s imp l e
as t h e LI S P "mat ch t h e p arent h es es " ru l e. A ctu al l y, t h e ans wer is
eas ier t h an it s eems , bu t it is s til l f ar f rom being as s imp l e as t h e
LI S P ru l e. Th e ans wer is : s t ar t at any nod e, and mov e t o t h e righ t
t o anot h er nod e. I f t h e nu mber of i t ems on t h e s tack is nev er l es s
t h an zero, and t h e f inal nu mber of i t ems on t h e s tack is one, t h en t h e
v is ited nod es rep res ent a s u bt ree, t h at is , a s u bexp res s ion.
Th e p rincip al ad v ant age of t h i s arrangement is t h e comp act in-
d iv id u al rep res ent at i on in memory. I t is a l ittl e s l ower t h an t h e t ree
arrangement s [Keith and Mar t i n, 1994], and t h e comp act nes s of t h e
rep res ent at i on cou l d make t h e s ys t em d if f icu l t t o ext end . Th e mai n
reas on it is s l ower is t h at each el ement mu s t be ev al u at ed f or wh at
t yp e it is - t h e el ement t yp e need s t o be s tored by a s ymbol ic rep re-
s ent at i on. Th at s ymbol mu s t be i nt erp ret ed , and Kei t h and Mar t i n
d o s o wi t h a s witch s t at ement , wh ich takes a s u bs t ant i al amou nt of
t i me t o ev al u at e.
Th e ot h er p rincip al d rawback t o t h i s met h od is t h at it d oes not
al l ow f or s kip p ing ev al u ation of p ar t s of t h e p rogram t h at d o not
need t o be ev al u at ed . For examp l e, as s u me t h at x = 10. I n t h e
f ol l owing exp res s ion, it is u nneces s ary t o ev al u at e y, I f x < 10 Th en
y E l s e z. Howev er, in a p os tf ix rep res ent at i on, y wou l d be ev al u at ed
nev erth el es s .
11. 5. 2 Prefix Expressions wi t h Recursive Eval uat ion
Kei t h and Mart i n al s o p rop os ed a p ref ix exp res s ion rep res ent at i on
with recu rs iv e ev al u ations . Pref ix ord ering is t h e op p os i t e of p os tf ix
ord ering. Th e op erat or p reced es t h e op erand s . Th e s econd array of
Figu re 11.9 s h ows t h e s ame exp res s ion we u s ed abov e bu t exp res s ed
in p ref ix ord ering. A p robl em h ere is t h at t h e op erand s mu s t be
known in ord er t o p roces s t h e op erat or, wh il e t h e op erand s follow
t h e op erat or.
Kei t h and Mar t i n s ol v e t h at p robl em wi t h t h ei r E v al Next A r g
f u nction. E v ery t i me E v al Next A rg is cal l ed , it i ncrement s a cou nt er
t h at id entif ies t h e cu rrent el ement in t h e array. Th en it cal l s its el f in
a manner ap p rop ri at e f or t h e t yp e of t h e id entif ied el ement. Wh en it
cal l s its el f , it au t omat i cal l y j u mp s t o t h e next el ement in t h e array.
Let u s l ook at h ow t h i s works more s p ecif ical l y. To begin ev al u - Evaluatin g a Prefix
at i ng t h e array in Fi gu re 11.9, E v al Next A rg gets cal l ed f or el ement A rray
0 of t h e array. Th e f u nction read s el ement zero and i nt erp ret s it t o
mean "take t h e s qu are root of t h e next el ement in t h e array." To d o
wou l d be rep res ented by, s ay, an integer. Howev er, f or cl arity, we wil l u s e
s ymbol s .
11 Impl ementati on Maki ng Genetic Programmi ng Work
t h at , E v al Next A r g mi gh t execu te t h e f ol l owing p s eu d ocod e: r e t u r n
S QRT(E v al NextA rg).
Th e ef f ect of t h i s p s eu d ocod e is t o at t emp t t o t ake t h e s qu are
root of el ement 1 in t h e array.
4
Howev er, cl ement 1 in t h e array
i nt erp ret s t o MUL. I t h as no inh erent r et u r n v al u e of wh ich t h ere is a
s qu are root u ntil t h e mu l tip l ication h as been p erf ormed . Th i s means
t h at t h e s qu are-root op erat or mu s t wait f or its op erand s u ntil f u rth er
ev al u at i ons h av e been p erf ormed . Th e f u rth er ev al u ations h ap p en
in t h e f ol l owing manner. E v al Next A r g migh t execu te t h e f ol l owing
p s eu d ocod e at t h i s p oint: r e t u r n E v al Next A r g * E v al Next A r g.
Not e wh at h ap p ens h ere. Th e s ys t em tries t o mu l tip l y t h e v al u es
in el ements 2 and 3 of t h e array. A rev iew of t h e array s h ows t h at
f u rth er ev al u ations wil l s til l be neces s ary becau s e el ement 2 is a +
op erat or, and it h as no i mmed i at e v al u e u nt i l it, t oo, h as been ev al -
u at ed . S o, t h e s ys t em cal l s E v al Next A r g ov er and ov er again u nt i l it
h as comp l etel y ev al u at ed t h e ind iv id u al .
Prefix Crossover C ros s ov er is p erf ormed in a way s imil ar t o t h at of t h e p os tf ix
ap p roach . S t ar t i ng at any el ement, t ake t h e arity of each el ement
mi nu s one and s u m t h es e nu mbers f rom l ef t t o righ t. Wh erev er t h e
s u m equ al s minu s one, a comp l ete s u bexp res s ion is cov ered by t h e
v is ited nod es . For i ns t ance, f or el ements two, t h ree, and f ou r, t h i s
giv es 1 + (1) + (1) = 1, and , ind eed , + z y is a comp l et e p ref ix
exp res s ion.
Th i s arrangement is s u p erior t o t h e p os tf ix arrangement in t h at
it al l ows f or s kip p ing ov er cod e t h at d oes not need t o be ev al u at ed .
I t s h ares t h e comp act nes s of rep res ent at i on of t h e p os tf ix ap p roach .
Th e i nt eres t ed read er may rev iew t h e original articl e, wh ich incl u d es
an innov ativ e op cod e ap p roach t o s toring t h e v al u es in t h e array.
11. 5. 3 A Graph I mpl ement at i on of GP
A not h er GP s ys t em emp l oying arrays and s tacks is PA DO (Paral l el
A l gori t h m Dis cov ery and O rch es t rat i on) [Tel l er, 1996]. Us ing grap h s ,
it l ooks u nl ike t h e tree-bas ed s ys t ems wh os e i mp l ement at i on we h av e
cons id ered s o f ar in t h i s ch ap t er. Gr ap h s are cap abl e of rep res ent i ng
comp l ex p rogram s t ru ct u res comp actl y. I n ad d i t i on, PA DO d oes not
j u s t p er mi t l oop s and recu rs ion, it p os itiv el y embraces t h em. Th i s is
not a triv ial p oi nt , s ince ot h er GP s ys tems h av e exp eri ment ed wi t h
l oop s and recu rs ion onl y gingerl y becau s e of t h e great d if f icu l ties t h ey
"'""" cau s e.
A grap h s t r u ct u r e is no more t h an nod es connected by edges.
Th e ed ges , s omet i mes al s o cal l ed arcs , may be t h ou gh t of as p oi nt ers
4
Remember E v al NextA rg au tomatical l y goes to th e next el ement in th e
array ev ery time it is cal l ed .
11.5 Impl ementati ons Wi t h Arrays or Stacks
bet ween two nod es ind icating t h e d irection of a mov ement f rom one
nod e t o t h e oth er. E ach ed ge rep res ents a p ar t of t h e f l ow of p rogram
control . Th e read er may not e t h at t ree genomes and l inear genomes
can al s o be rep res ent ed as grap h s . I n a tree s t ru ct u re, f or i ns t ance,
t h ere may be s ev eral incoming bu t onl y one ou t goi ng ed ge at each
nod e. I n a grap h s ys t em, h owev er, t h ere may be s ev eral incoming an d
s ev eral ou t goi ng ed ges f or each nod e. Fi gu re 5.3 s h owed a d i agram
of a s mal l PA DO p rogram.
A f ew p oi nt s abou t t h e s ys t em are i mp or t ant bef ore we can l ook
at i mp l ement at i on is s u es .
LI S t a r t a n d e n d n o d e s
Th ere are two s p ecial nod es , S t a r t and E nd . E xecu t i on begins
at S t a r t , and wh en t h e s ys t em h i t s E nd , t h e execu tion of t h e
p rogram is ov er.
5
Th e f l ow of execu tion is d et ermi ned by t h e
ed ges in t h e grap h . More abou t t h at l ater.
P ADO u s e of t h e s t a c k
Dat a is trans f erred among nod es by means of a s tack. E ach of
t h e nod es execu tes a f u nction t h at read s f rom or writes t o t h e
s tack. For examp l e, t h e nod e A read s t h e v al u e of t h e op erand a
f rom RA M and p u s h es it onto t h e s tack. Th e nod e 6 p u s h es t h e
v al u e 6 ont o t h e s tack. Th e nod e MUL p op s two v al u es f rom t h e
s tack, mu l tip l ies t h em, and p u s h es t h e res u l t ont o t h e s tack.
P ADO us e of i nde xe d me mo r y
Dat a may al s o be s av ed by t h e s ys t em in t h e ind exed memory.
Th e nod e l abel ed Wr i t e p op s two argu ment s f rom t h e s tack. I t
writes t h e v al u e of t h e f irs t argu ment into t h e ind exed memory
l ocation i nd i cat ed by t h e s econd argu ment . Read f etch es d at a
f rom t h e memory l ocation.
Not e t h at t h ere are real l y two t h i ngs t h at each nod e mu s t d o: it
mu s t p erf orm s ome f u nction on t h e s tack and / or t h e ind exed memory,
and it mu s t d ecid e wh ich nod e wil l be t h e next t o execu te. Th i s
l at t er f u nction is real l y a mat t er of ch oos ing between t h e ou tgoing
ed ges f rom t h e nod e. C ons id er Fi gu re 5.3 again. Th e MUL nod e may
trans f er control t o Wr i t e, Read , or 4. For th is p u rp os e each nod e
h as a branch -d ecis ion f u nction wh ich d et ermi nes , d ep end i ng on t h e
s tack, memory cel l s , cons t ant s , or t h e f oregoing nod e, wh ich of t h e
ed ges t o t ake.
5
I n s ome imp l ementations , PA DO rep eats execu tion a f ixed nu mber of
times or u ntil a certain cond ition is met. S o, it is not qu ite accu rate to s ay
th at th e p rogram al ways end s wh en th e E nd nod e is reach ed .
IckU 11 Impl ementati on Maki ng Genetic Programmi ng Work
From an i mp l ement at i on v iewp oint, PA DO is mu ch more d if f i-
cu l t t h an tree or l inear genomes . For examp l e, t h ere are a l ot more
p oi nt ers t o keep t rack of . I magi ne cros s ing ov er t h e p rogram rep re-
s ent at i on in Fi gu re 5.3 wi t h anot h er p rogram rep res ent at i on. Wh at
t o d o wi t h al l of t h e nod es and , wors e, al l of t h e p oi nt ers t h at h av e
been cu t ? How d o you keep t rack of t h e p oi nt ers , and wh ere d o t h ey
get reat t ach ed ? Th e d es igner h as come u p wi t h good s ol u tions t o
t h es e p robl ems , bu t t h e p oint is t h at t h e p robl em was a t ou gh one
rel ativ e t o ot h er GP s ys t ems .
Dual Represen tation of Becau s e of t h e d if f icu l ty of cod ing t h i s s ys t em, an i nd i v i d u al is
In dividuals rep res ent ed in two d if f erent s t ru ct u res . For t h e p u rp os e of s torage,
cros s ov er, and mu t at i on, ind iv id u al s are s tored in a l inked l is t. E ach
el ement in t h e l is t cont ai ns al l of t h e inf ormation neces s ary t o id en-
tif y a PA DO nod e. O n t h e ot h er h and , f or t h e p u rp os e of execu tion,
ind iv id u al s are s t ored as arrays . Th e p u rp os e of t h i s d u al rep res enta-
tion is t h at t h e l inked l is t p rov id es s imp l e cros s ov er and mu t at i on bu t
wou l d s l ow d own t h e s ys t em if it were t h e bas is of p rogram execu -
t i on. O n t h e ot h er h and , wh il e an array p rov id es f or f as t execu tion,
' > it wou l d be comp l i cat ed t o keep t rack of al l of t h e p oi nt ers d u ri ng
cros s ov er in t h e array.
Th e mi nu t e d etail s of i mp l ement at i on of t h i s i nt eres t i ng and p ow-
erf u l s ys t em are beyond t h e s cop e of t h i s s ection. Th e read er may con-
s u l t [Tel l er and Vel os o, 1995a] [Tel l er and Vel os o, 1995b] [Tel l er, 1996]
[Tel l er and Vel os o, 1996] f or more inf ormation.
11.6 Implementations Using Machine Code
Wh i l e t h e s ys t ems p res ent ed abov e rep res ent ind iv id u al s as h igh -l ev el
d at a s t ru ct u res , mach i ne cod e-oriented genetic p r ogr ammi ng s ys t ems
u s e l ow-l ev el rep res ent at i ons . Let u s t ake a cl os er l ook at h ow s u ch
s ys t ems are i mp l ement ed .
11. 6. 1 Evol ving Machi ne Code wi t h AI MGP
No mat t er h ow an ind iv id u al is initial l y rep res ented , it is al ways
rep res ent ed f inal l y as a p iece of mach i ne cod e, becau s e a p roces s or
h as t o execu te t h e ind iv id u al f or f itnes s ev al u ation. Dep end i ng on
t h e initial rep res ent at i on t h ere are at l eas t t h e f ol l owing t h ree GP
ap p roach es , t h e t h i rd of wh ich is t h e top ic of t h i s s ection.
1. Th e common ap p roach t o GP u s es a t ech ni qu e wh ere an ind iv i-
d u al rep res ent at i on in a p robl em-s p ecif ic l angu age is execu ted
by a v i rt u al mach ine, as s h own in Fi gu re 11.10 (t op ). Th i s
s ol u tion giv es h igh abil ity t o cu s tomize t h e l angu age d ep end i ng
11.6 Impl ementati ons Using Machi ne Code
on t h e p rop ert i es of t h e p robl em at h and . Th e d i s ad v ant age of
t h i s p arad i gm is t h at t h e need f or t h e v i rt u al mach i ne inv ol v es
a l arge p r ogr ammi ng and ru n t i me ov erh ead .
Genetic operators
Evaluation result
Genetic operators
Evaluation result
Binaries
Genetic operators
individual [CPUj
Evaluation result
Binaries
2. A not h er ap p roach is t o comp il e each ind iv id u al f rom a h igh er-
l ev el rep res ent at i on into mach i ne cod e bef ore ev al u ation, as
s h own in Fi gu re 11.10 (mid d l e). Th i s ap p roach can p rov id e
genetic p rogrammi ng wi t h p robl em-s p ecif ic and p owerf u l op er-
at ors and al s o res u l ts in h igh -s p eed execu tion of t h e ind iv id u al .
Th e comp i l at i on its el f is an ov erh ead , of cou rs e, and comp il ers
d o not p rod u ce p erf ectl y op timized mach i ne cod e. Nev erth e-
l es s , t h e s p eed -u p can be cons id erabl e if an ind iv id u al ru ns , on
av erage, f or a l ong t i me d u ri ng f itnes s ev al u ation. Long exe-
cu t i on t i mes may be d u e t o, s ay, a l ong-ru nning l oop or may
be d u e t o a l arge nu mber of f itnes s cas es in t h e t rai ni ng s et.
Probl em-s p ecif ic op erat ors are f requ entl y requ ired .
Figu re 11.10
Three approaches to
make GP work
Figu re 11.11
Machine code GP with
genetic compilation
11 I mp l e me n t a t i on Ma k i n g Ge ne t i c Pr og r a mmi n g Wor k
Th is ap p roach h as been u s ed by [Kel l er and Banzh af , 1996] and
[Fried rich and Banzh af , 1997]. Wh il e th e f irs t ap p roach ev ol v es
cod e in a p otential l y arbitrary l angu age wh ich th en gets inter-
p reted or comp il ed by a s tand ard comp il er l ike A NS I -C , th e
s econd u s es its own gen etic compiler. Th u s , th ere is no s ep arate
comp il ation s tep f or th e s ys tem and execu tion times ap p roach
th os e of th e s ys tem th at manip u l ates mach ine cod e d irectl y.
Figu re 11.11 s h ows h ow tokens rep res enting mach ine cod e in-
s tru ctions are comp il ed - by a f as t and s imp l e genetic comp il er
- to mach ine cod e wh ich th en gets execu ted . Th is meth od h as
ad v antages wh en working with C I S C p roces s ors , wh ere mach ine
l angu age f eatu res v ariabl e l ength ins tru ctions .
Genome of equally sized tokens:
inc A dec B pop S ret
Efficient on-the-fly translation or "compilation"
I \ \
: 01110010O110001Oojl 0111101110101010111011001100010^1010110111010101
Binary code to be executed.
3. Th e central ap p roach of th is s ection - au tomatic ind u ction of
mach ine cod e with GP (A I MGP) - rep res ents ind iv id u al s as
mach ine cod e p rograms wh ich are d irectl y execu tabl e. Th u s ,
each ind iv id u al is a p iece of mach ine cod e. I n p articu l ar, th ere
are no v irtu al mach ines , intermed iate l angu ages , interp reters ,
or comp il ers inv ol v ed . Th is ap p roach was earl ier introd u ced as
th e comp il ing genetic p rogramming s ys tem [Nord in, 1994].
6
A I MGP h as been imp l emented in C . Th u s , ind iv id u al s are in-
v oked with a s tand ard C f u nction cal l . Th e s ys tem p erf orms
rep eated typ e cas ts between p ointers to arrays f or th e manip u -
l ation of ind iv id u al s and between p ointers to f u nctions f or th e
execu tion of th e ind iv id u al s as p rograms .
A I MGP h as accel erated ind iv id u al execu tion s p eed by a f actor of
2000 comp ared to LI S P imp l ementations [Nord in and Banzh af , 1995b].
Th e ap p roach was earl ier cal l ed "comp il ing" becau s e it comp os es ma-
ch ine cod e p rograms wh ich are execu ted d irectl y. Becau s e th e ap p roach
s h ou l d not be conf u s ed with oth er ap p roach es u s ing a comp il er for th e
map p ing into mach ine cod e, we h av e renamed it.
11.6 Implementations Using Machine Code
I t is th e f as tes t ap p roach av ail abl e in GP f or ap p l ications th at al l ow
f or its u s e [Nord in, 1997]. (S ee www.aiml earning.com.)
11.6.2 The Structure of Machine Code Functions
A s s aid earl ier, th e ind iv id u al s of A I MGP cons is t of mach ine cod e s e-
qu ences res embl ing a s tand ard C f u nction. Th u s A I MGP imp l ements
l inear genomes , and its cros s ov er op erator works on a l inear s tru c-
tu re. Figu re 11.12 il l u s trates th e s tru ctu re of a f u nction in mach ine
cod e. Th e f u nction cod e cons is ts of th e f ol l owing major p arts :
1. Th e h ead er d eal s with ad minis tration neces s ary wh en a f u nc-
tion gets entered d u ring execu tion. Th is normal l y means ma-
nip u l ation of th e s tack - f or ins tance, getting th e argu ments f or
th e f u nction f rom th e s tack. Th ere may al s o be s ome p roces s -
ing to ens u re cons is tency of p roces s or regis ters . Th e h ead er is
of ten cons tant and can be ad d ed at th e initial ization of each in-
d iv id u al 's mach ine cod e s equ ence. Th e genetic op erators mu s t
be p rev ented f rom ch anging th e h ead er d u ring ev ol u tion.
2. Th e footer "cl eans u p " af ter a f u nction cal l . I t mu s t al s o be
p rotected f rom ch ange by th e genetic op erators .
3. Th e return instruction f ol l ows th e f ooter and f orces th e s ys -
tem to l eav e th e f u nction and to retu rn p rogram control to th e
cal l ing p roced u re. I f v ariabl e l ength p rograms are d es ired , th en
th e retu rn op erator cou l d be al l owed to mov e with in a range
between th e minimu m and maximu m p rogram s ize. Th e f ooter
and th e retu rn ins tru ction mu s t be p rotected agains t th e ef f ects
of genetic op erators .
4. Th e function body cons is ts of th e actu al p rogram rep res ent-
ing an ind iv id u al .
5. A buffer is res erv ed at th e end of each ind iv id u al to al l ow f or
l ength v ariations .
Header -- *- Body
V
d=c*a s=c+14
Footer
_i_
Buffer
a=c+d restore
Figure 11.12
Structure of a program
individual in AIMGP
11 Impl ementati on Maki ng Genetic Programmi ng Work
11. 6. 3 Genet ic Oper at or s
A I MGP h as t h e f ol l owing two genetic op erat ors :
1. A mut a t i o n op erat or ch anges t h e content of an i ns t ru ct i on
by mu t at i ng op -cod es , cons t ant s or regis ter ref erences . I t ran-
d oml y ch anges one bit of t h e i ns t ru ct i on p rov id ed cert ai n crite-
ria are f u l f il l ed . Th e op erat or can ch ange onl y t h e i ns t ru ct i on
t o a member of t h e s et of ap p rov ed i ns t ru ct i ons t o as s u re t h at
t h ere wil l be no il l egal i ns t ru ct i ons , bu s errors , u nwant ed l oop s
or j u mp s , et c. Fu rt h ermore, t h e op erat or ens u res ari t h met i c
cons is tency, s u ch as p rot ect i on agains t d iv is ion by zero.
2. Th e crossover op erat or works on v ariabl e l ength ind iv id u al s .
Two cros s ov er met h od s h av e been u s ed in A I MGP. Th e f irs t
met h od (p rot ect ed cros s ov er) u s es a regu l ar GA bi nary s t ri ng
cros s ov er wh ere cert ai n p ar t s of t h e mach i ne cod e i ns t ru ct i on
are p rot ect ed f rom cros s ov er t o p rev ent creation of il l egal or
u nwant ed i ns t ru ct i ons , as s h own in Fi gu re 11.13. Th e s econd
met h od (i ns t ru ct i on cros s ov er) al l ows cros s ov er onl y between
i ns t ru ct i ons , in 32-bit interv al s of t h e bi nary s tring. Hence, t h e
genome is s ni p p ed and exch anged s o as t o res p ect t h e 32-bit
mach i ne cod e i ns t ru ct i on bou nd ari es . Fi gu re 11.14 i l l u s t rat es
t h e l at t er cros s ov er met h od [Nord in and Banzh af , 1995b].
:'! :1 t
Figure 11.13
Protected crossover.
crossover point
Hitting an illegal location
3 2 b j t i n s t m c t i o n
,
~\
for crossover is prohibited . -
r
.T..T. ^
m
.. ,,,,.
bv deflecting crossover to i oii
1
ooioi'OOOl<ioiiiioiii#ioio|oiiioiiooii<oi<ioioii^Jioiojoiiiooiioiioooiooioioiioiiioioi(
a neighboring legal
crossover point.
- protected field
11.7 A Guide t o Parameter Choices
O nce a s ys t em h as been cod ed , one mu s t ch oos e p ar amet er s f or a
GP ru n. Th e good news is t h at GP works wel l ov er a wid e range of
p ar amet er s . Th e bad news is t h at GP is a you ng f iel d and t h e ef f ect
of u s ing v ariou s combi nat i ons of p ar amet er v al u es is j u s t begi nni ng
t o be exp l ored . We end t h i s ch ap t er by d es cribing t h e typ ical p a-
ramet ers , h ow t h ey are u s ed , and wh at is known abou t t h ei r ef f ects .
11.7 A Guide t o Parameter Choices
| 2 J
Mu ch of wh at GP res earch ers know abou t p ar amet er s is anecd ot al
and bas ed on exp erience. We wil l s u gges t ru l es of t h u mb f or t h e
v ariou s p ar amet er s bas ed on ou r exp erience. O u r aim h ere is not
merel y t o l is t p ar amet er s t h at are wel l d es cribed el s ewh ere, bu t t o
l ook at th os e p ar amet er s wh ere real exp erience makes it p os s ibl e t o
giv e s ome p ract i cal ad v ice abou t real i mp l ement at i on is s u es .
Pop u l at i on s ize is an i mp or t ant p ar amet er s et t i ng in a GP ru n Population Size
f or s ev eral reas ons . To begin wi t h , bigger p op u l at i ons t ake more
t i me wh en ev ol v ing a generation. A l s o, bigger p op u l at i ons h av e more
genetic d iv ers ity, exp l ore more areas of t h e s earch s p ace, and may
ev en red u ce t h e nu mber of ev al u ations requ ired f or f ind ing a s ol u tion.
Pos itiv e res u l t s h av e been ach iev ed wi t h p op u l at i on s izes rangi ng
f rom P = 10 t o P = 1 000 000 ind iv id u al s . Between 10 and 100 000
ind iv id u al s , t h e au t h or s h av e exp erienced a near l inear i mp rov ement
in p erf ormance of t h e s ys t em. A s t art i ng p oint of P = 1000 is u s u -
al l y accep t abl e f or s mal l er p robl ems . Bu t as t h e p robl em grows more
d if f icu l t, t h e p op u l at i on s ize s h ou l d grow. A ru l e of t h u mb in d eal -
ing wi t h more d if f icu l t p robl ems is t h at , if a p robl em is s u f f icientl y
d if f icu l t, t h en t h e p op u l at i on s ize s h ou l d s t art at arou nd P = 10 000.
Th i s nu mber s h ou l d be increas ed if t h e ot h er p ar amet er s t end t o ex-
ItfctJ 11 Implementation Making Genetic Programming Work
Maximum Number of
Generations
ert h eav y s el ection p res s u re. O n t h e ot h er h and , if t h ere is a l ot of
nois e in s el ection (v ery s mal l t ou r nament s and t h e l ike), t h en s mal l er
p op u l at i ons wil l s u f f ice.
A l arger nu mber of t rai ni ng cas es requ ires an increas e in t h e p op -
u l at i on s ize. I n a s mal l er p robl em, s ay, l es s t h an 10 f itnes s cas es , a
p op u l at i on s ize of 10 t o 1000 u s u al l y s u f f ices . Between 10 and 200
f itnes s cas es , it is bet t er t o u s e 1000 < P < 10 000. A bov e 200 t rai n-
ing cas es , we recommend u s ing P > 10 000. Koza s u mmari zes h is
exp eriences wi t h p op u l at i on s ize in C h ap t er 26 of [Koza, 1992d ]. He
u s es 50 < P < 10 000 in h is book, bu t rep ort s 500 ind iv id u al s as t h e
commones t s et t i ng.
E arl y in t h e h is tory of GP, it was argu ed t h at t h e l imit on gener-
ations s h ou l d be qu i t e l ow becau s e not h i ng h ap p ens af ter generat i on
G
m
ax = 50. Th at h as not been ou r exp erience. I n s ome ru ns , inter-
es ting ev ol u tion h as been d el ayed t o as l ate as generat i on 1000. O t h er
t i mes , ev ol u tion wil l s eem t o s t agnat e and t h en s u d d enl y p ick u p and
begin imp rov ing t h e p op i d at i on again. We h av e s een examp l es wh ere
interes ting t h i ngs h ap p en af ter generat i on 10 000.
Th at s aid , it is i mp ract i cal t o ru n mos t GP s ys t ems f or t h at many
generat i ons - t h ere is not enou gh C PU t i me av ail abl e. Th er e are two
p os s ibl e p ract i cal s ol u tions :
1. S t ar t t es t i ng wi t h a rel ativ el y l ow s et t i ng f or G
max
, s u ch as 50 <
Gmax < 100 generations . I f you are not get t i ng t h e res u l t s you
want , f irs t rais e t h e p op u l at i on s ize and t h en rais e t h e nu mber
of generat i ons .
2. Monitor t h e ru n t o d et ermi ne wh et h er it may s af el y be t ermi -
nat ed . E xp l os iv e growth of i nt rons al mos t al ways mar ks t h e end
of ef f ectiv e ev ol u tion. Th i s growt h may be meas u red ind irectl y
by meas u ri ng t h e p ercent age of t ot al cros s ov er ev ents t h at are
d es t ru ct i v e. A s a ru l e of t h u mb, wh en d es t ru ct i v e cros s ov er
f al l s t o bel ow 10% of al l cros s ov er ev ents , no f u rth er ef f ectiv e
ev ol u tion wil l occu r. S o it is p os s ibl e t o s et G
max
qu i t e h igh bu t
t o cat ch t h e ru ns in wh ich ev ol u tion is f inis h ed and t er mi nat e
t h em earl y.
Termin al an d A f ew ru l es of t h u mb f or t h e t ermi nal s et and f u nction s et h av e
Fun ction s Set s erv ed t h e au t h ors wel l :
Make t h e t ermi nal and f u nction s et as s mal l as p os s ibl e. Larger
s ets u s u al l y mean l onger s earch t i me. Th e s ame is t r u e f or t h e
nu mber of regis ters u s ed in A I MGP.
11.7 A Guide to Parameter Choices
I t is not t h at i mp or t ant t o h av e (al l ) cu s tomized f u nctions in t h e
f u nction s et: t h e s ys t em of ten ev ol v es its own ap p roxi mat i ons .
I t is v ery i mp or t ant , h owev er, t h at t h e f u nction s et cont ai ns
f u nctions p er mi t t i ng non-l inear beh av ior, s u ch as if -th en f u nc-
tions , Bool ean op erat ors on nu mbers , and s igmoid s qu as h ing
f u nctions .
Th e f u nction s et s h ou l d al s o be ad ap t ed t o t h e p robl em in
t h e f ol l owing way: p robl ems t h at are exp ect ed t o be s ol v ed by
s moot h cu rv es s h ou l d u s e f u nction s ets t h at generat e s moot h
cu rv es , and f u nctions t h at are exp ect ed t o be s ol v ed by ot h er
t yp es of f u nctions s h ou l d h av e at l eas t one rep res ent at i v e of
t h es e f u nctions in t h e f u nction s et.
S omet i mes t rans f ormat i ons on d at a are v ery v al u abl e, f or in-
s t ance, f as t Fou rier t rans f orms [O akl ey, 1996].
Th e typ ical s et t i ngs of mu t at i on and cros s ov er p robabil ities in GP
inv ol v e v ery h igh rat es of cros s ov er and v ery l ow rat es of mu t at i on.
E xp er i ment s s u gges t t h at a d if f erent bal ance (p
c
= 0.5, p
m
= 0.5)
bet ween t h e two op erat ors may l ead t o bet t er res u l t s on h ard er p rob-
l ems [Banzh af et al ., 1996] and t h at t h e wors t res u l ts are obt ai ned
wh en ei t h er op erat or is l ef t ou t .
Th e p rop er bal ance bet ween t h es e op erat ors is , th eref ore, a wid e
op en qu es t i on and may be v ery p robl em d ep end ent . A rou gh rid e of
t h u mb wou l d be t o s t ar t wi t h 90% cros s ov er and 10% mu t at i on. I f
t h e res u l ts are not p l eas ing, increas e t h e mu t at i on r at e.
S el ection p res s u re is anot h er p ar amet er t o be p u t u nd er s ome
cond itions . I f t ou r nament s el ection is ap p l ied , t h e s ize of t h e t ou r-
nament wil l d et ermi ne t h e s el ection p res s u re. Th e au t h ors h av e v ery
good exp eriences wi t h l ow s el ection p res s u re. Tou rnament s of 4 in-
d iv id u al s regu l arl y p erf orm v ery wel l .
Res earch in t h e area of p ars i mony p res s u re is not f u l l y concl u s iv e
at t h i s t i me. S ome res earch ers h av e rep ort ed good res u l t s wi t h p ars i-
mony p res s u re. O u r own exp erience is t h at cons t ant p ars i mony p res -
s u re u s u al l y giv es wors e res u l ts and makes l ocal op t i ma more l ikel y.
Howev er, v ariabl e p ars i mony p res s u re p rod u ces v ery nice, s h ort , and
el egant s ol u tions . S ome res earch ers h av e rep ort ed good res u l ts wi t h
ad ap t i v e p ars i mony, wh ich is ap p l ied onl y wh en a s ol u tion t h at p er-
f orms wel l is f ou nd .
A s a general ru l e, t h e maxi mu m d ep t h of trees or t h e maxi mu m
p rogram s ize s h ou l d be s et s u ch t h at t h e p rograms can contain abou t
t en t i mes t h e nu mber of nod es as t h e exp ect ed s ol u tion s ize. Th i s
al l ows bot h f or es t i mat i on error in p red icting t h e s ol u tion s ize and
f or i nt ron growt h .
Mutation and
Crossover Balance
Parsimony Pressure
Maximum Program
Size
11 Impl ementati on Maki ng Genetic Programmi ng Work
In itial Program Size Typ ical l y, t h e initial p rogram s ize s h ou l d be v ery s mal l comp ared
t o t h e maxi mu m s ize. Th i s al l ows t h e s ys t em t o bu il d u p good ind i-
v id u al s p iece by p iece. Bu t f or comp l ex p robl ems , wh en no s u cces s
res u l ts f rom t h i s ap p roach , we s u gges t t ryi ng l onger p rograms at t h e
s t ar t t o al l ow t h e s ys t em t o s t ar t wi t h s ome comp l exity al read y and
t o av oid l ocal mi ni ma earl y on.
Exercises
1. Wh y is GP comp u t at i onal l y exp ens iv e?
2. Wh at is garbage col l ection, and wh y is it neces s ary in s ome GP
i mp l ement at i ons ?
3. Giv e t h ree examp l es of h ow t o rep res ent an ind iv id u al in GP.
4. Wh y is it eas ier t o d o cros s ov er wh en u s ing l inked l is ts t h an
wh en u s ing arrays t o rep res ent ind iv id u al s in a tree?
5. Def ine p os tf ix and p ref ix rep res ent at i ons .
6. Des cribe two met h od s of i mp l ement i ng tree s t ru ct u res s u i t abl e
f or GP.
7. Des cribe t h ree i mp or t ant p ar amet er s of GP ru ns .
12 Appl ications of Genet ic
Pr ogr amming
C ontents
12. 1 General Overview 340
12.2 Applications from A t o Z 340
12. 3 Science-Oriented Applications of GP 341
12.3.1 Biochemistry Data Mining 341
12.3.2 Sequence Problems 347
12.3.3 Image Classification in Geoscience and Remote
Sensing 351
12.4 Computer Science-Oriented
Applications 354
12.4.1 Cellular Encoding of Artificial Neural Networks . 354
12.4.2 Development and Evolution of
Hardware Behaviors 357
12.4.3 Intrusion Detection 358
12.4.4 Autoparallelization 359
12.4.5 Confidence of Text Classification 360
12.4.6 Image Classification with the PADO System . . . 362
12.5 Engineering-Oriented Applications of GP . . 363
12.5.1 Online Control of Real Robot 363
12.5.2 Spacecraft Attitude Maneuvers 368
12.5.3 Hexapodal Robot 370
12.5.4 Design of Electrical Circuits 371
12.5.5 Articulated Figure Motion Animation 373
12.6 Summary 376
12 Applications of Genetic Programming
Table 12. 1
Development of GP
literature since 1989
12.1 General Overview
I n th is ch ap ter we d is cu s s a s el ected nu mber of ap p l ications of genetic
p rogramming. Th e s el ection is arbitrary bu t is intend ed to giv e a
tas te of wh at is al read y d is cu s s ed in GP. Regretf u l l y, d u e to th e l arge
nu mber of p ractical l y rel ev ant ap p l ications of genetic p rogramming,
we h ad to s el ect among v ery many imp ortant contribu tions . Th is
s ection and th e next, h owev er, are d ev oted to an ov erv iew of th e
d iv ers ity of ap p l ications res earch ers h av e tackl ed with GP.
To s tart with , it is cl ear th at th e nu mber of ap p l ications mu s t be
correl ated with th e nu mber of p ap ers p u bl is h ed in GP. Th is wil l giv e
a l ower bou nd on ap p l ications , becau s e it can be s af el y as s u med th at
a cons id erabl e p ercentage of ap p l ications nev er get p u bl is h ed at al l .
S o l et u s f irs t l ook at th e d ev el op ment of GP p u bl ications in
general . Tabl e 12.1 s u mmarizes th e h is tory of of GP p u bl ications
s ince 1989 in p art u s ing d ata giv en in [A l and er, 1995].
Year
1989
1990
1991
1992
1993
1994
1995
1996
1997
Nu mber of p u bl ications
1
12
18
30
40
95
140 (es t.)
220 (es t.)
150 (1s t h al f , es t.)
o
&d:
r w
12.2 Applications f rom A t o Z
Tabl e 12.2 giv es an ov erv iew of ap p l ications accord ing to ou r cl as s if i-
cation. A s one can s ee, genetic p rogramming h as s p awned nu merou s
interes ting ap p l ications in th e s h ort time of its exis tence.
I t can be s af el y as s u med th at at l eas t th e s ame growth f actor
ap p l ies to ap p l ications as it d oes to GP in general .
Tabl e 12.3-12.6 on th e f ol l owing p ages p res ent th e d if f erent ap -
p l ications of genetic p rogramming, incl u d ing th e s ou rces wh ere more
inf ormation can be f ou nd . S ome entries are rep eated as th ey f it u nd er
more th an one h ead ing.
12.3 Science-Oriented Applications of GP
EH
A p p l i cat i on d omai n
al gori t h ms
art
biotech nol ogy
comp u t er grap h ics
comp u t i ng
control (general )
control (p roces s )
control (robot s and agents )
control (s p acecraf t)
d at a mining
el ectrical engineering
f inancial
h ybri d s ys t ems
image p roces s ing
interactiv e ev ol u tion
mod el ing
nat u r al l angu ages
op t i mi zat i on
p at t er n recognition
s ignal p roces s ing
Firs t p u bl ication
1992
1993
1993
1991
1992
1992
1990
1992
1996
1996
1994
1994
1993
1993
1991
1994
1994
1994
1994
1992
C u m. nu mber
8
5
9
7
17
4
5
27
2
6
9
9
9
14
4
7
4
7
20
5
Th e f ol l owing s ections d is cu s s s ome ap p l ications in more d et ai l
in ord er t o giv e an imp res s ion of t h e d iv ers ity of p robl ems GP h as
been ap p l ied t o. Th e au t h ors h av e mad e an arbi t rary s el ection and
d o not cl aim t o cov er al l top ics exh au s tiv el y.
We grou p t h e s el ected ap p l ications rou gh l y in t h e f ol l owing d o-
mai ns :
1. S cience-oriented ap p l i cat i ons
2. C omp u t er s cience-oriented ap p l ications
3. E ngineering-oriented ap p l i cat i ons
12.3 Science-Oriented Applications of GP
12.3.1 Biochemistry Data Mi ni ng
I n many areas of s cience and tech nol ogy, s o mu ch knowl ed ge h as Problem Domain
accu mu l at ed t h at t h e met h od s of d at a mi ni ng are need ed in ord er t o
d is cov er i nt eres t i ng and v al u abl e as p ect s of t h e d at a t h at wou l d h av e
gone u nd is cov ered oth erwis e.
Table 12.2
Summary overview of
applications of GP in
different areas
EH
12 Appl icat ions of Ge ne t i c Pr og r a mmi n g
A p p l i cat i on d omai n
al gor i t h ms
art
biotech nol ogy
comp u t er grap h i cs
comp u t i ng
Year j A p p l i cat i on
1996
1997
1996
1994
1994
1996
1993
1992
1994
1993
1995
1995
1994
1996
1995
1995
1993
1994
1994
1994
1993
1996
1994
1994
1991
1991
1993
1995
1997
1995
1994
1996
1992
1996
1991
1996
1996
1994
1994
1995
1996
1996
1997
1996
1995
1994
acycl ic gr ap h ev al u at i on
cach ing al gor i t h ms
ch aos exp l orat i on
cros s ing ov er bet ween s u bp op u l at i ons
rand omi zers (R)
recu rs ion
s ort i ng al gori t h ms
s ort i ng net works
art works
i mages
jazz mel od ies
mu s ical s t r u ct u r e
v i rt u al real i t y
bi och emi s t ry
control of biotech nol ogical p roces s es
DNA s equ ence cl as s if ication
d et ect or d is cov ering and u s e
p r ot ei n core d et ect i on (R2)
p rot ei n s egment cl as s if ication
p rot ei n s equ ence recognition
s equ enci ng
s ol v ent exp os u re p red i ct i on (R2)
3D obj ect ev ol u t i on
3D mod el i ng (R)
artif icial ev ol u t i on
artif icial ev ol u t i on
comp u t er ani mat i on
comp u t er ani mat i on
comp u t er ani mat i on
comp u t er s ecu ri t y
d amage- i mmu ne p r ogr ams
d at a comp res s i on
d at a encod i ng
d at a p roces s ing s t r u ct u r e id entif ication
d ecis ion t rees
d ecis ion t r ees
inf erential es t i mat i on
mach i ne l angu age
moni t ori ng
mach i ne l angu age
obj ect or i ent at i on
p aral l el i zat i on
p aral l el i zat i on
s p ecif ication ref inement
s of tware f au l t nu mber p red i ct i on
v i rt u al real ity
S ou rce
[E h renbu rg, 1996]
[Pat ers on and Liv es ey, 1997]
[O akl ey, 1996]
[Ryan, 1994]
[Janni nk, 1994]
[Wong and Leu ng, 1996]
[Kinnear, Jr. , 1993a, Ki nnear, Jr . , 1994]
[Hil l is , 1992]
[S p ector and A l p ern, 1994]
[S ims , 1993a]
[S p ector and A l p ern, 1995]
[S p ector and A l p ern, 1995]
[Das et al ., 1994]
[Raymer et al ., 1996]
[Bet t enh au s en et al ., 1995a]
[Hand l ey, 1995]
[Koza, 1993b]
[Hand l ey, 1994a]
[Koza and A nd r e, 1996a]
[Koza, 1994b]
[Hand l ey, 1993a]
[Hand l ey, 1996b]
[Ngu yen and Hu ang, 1994]
[Ngu yen et al ., 1993]
[S ims , 1991a]
[S ims , 1991b]
[Ngo and Marks , 1993]
[Gritz and Hah n, 1995]
[Gritz and Hah n, 1997]
[C ros bie and S p af f ord , 1995]
[Dickins on, 1994]
[Nord in and Banzh af , 1996]
[Koza, 1992d ]
[Gray et al ., 1996a]
[Koza, 1991]
[Mas and and Pi at es ky- S h ap i r o, 1996]
[McKay et al ., 1996]
[Nord in, 1994]
[A tkin and C oh en, 1993]
[C rep eau , 1995]
[Bru ce, 1996]
[Wal s h and Ryan, 1996]
[Ryan and Wal s h , 1997]
[Haynes et al ., 1996]
[Robins on and Mcl l roy, 1995a]
[Das et al ., 1994]
Table 12.3
GP applications overview,
part I (R means
"repeated") Variou s d at a mi ni ng met h od s exis t. O ne of t h em is (au t omat i c)
cl u s tering of d at a into grou p s s u ch t h at f rom t h e s t r u ct u r e of th os e
cl u s ters one can d raw ap p rop ri at e concl u s ions . C l u s t eri ng met h od s
are a general tool in p at t er n recognition, and it can be argu ed t h at
d at a in a d at abas e are p at t er ns organized accord ing t o a h omogeneou s
s et of p rincip l es , cal l ed f eatu res .
Th e p robl em of d at a mi ni ng t h u s becomes a p robl em of f eatu re
ext ract i on, and it is t h i s p oint of v iew t h at is d is cu s s ed in t h i s ap p l i-
12.3 Science-Oriented Appl i cati ons of GP MfTi
A p p l i cat i on d omai n
cont rol
cont rol (p roces s )
cont rol (robot i cs )
cont rol (s p acecraf t)
d at a mi ni ng
Year
1995
1995
1994
1992
1990
1996
1995
1996
1994
1993
1994
1994
1994
1994
1994
1994
1995
1997
1995
1992
1996
1997
1997
1997
1994
1993
1994
1994
1996
1992
1994
1992
1996
1997
1993
1994
1996
1997
1996
1996
1995
1997
1995
1995
A p p l i cat i on
boar d game
coop erat i ng s t rat egi es
s t ead y s t at es of d ynami cal s ys t ems
v eh icl e s ys t ems
control s t r at egy p r ogr ams
mod el ing ch emical p roces s s ys t ems
p roces s engineering
p roces s engineering
s t i rred t ank
au t onomou s agent s
au t onomou s agent s
au t onomou s agent s
au t onomou s agent s
au t onomou s agent
bat t l e t ank
corrid or f ol l owing
ju ggl ing
mani p u l at or mot i on
mot i on
mot i on in cri t t er p op u l at i on
mot i on p l anni ng
mot i on and p l anni ng
nav i gat i on
nav i gat i on
obs t acl e av oid ing
p l anni ng
p l anni ng
p l anni ng
s ens or ev ol u t i on
s u bs u mp t i on
t er r ai n f l at t eni ng
trail er back-u p
wal l -f ol l owing
wal l -f ol l owing
wal king and crawl ing
wal king and crawl ing
maneu v eri ng
maneu v eri ng
d at abas es
i nt ernet agent s
p red i ct i ng DNA
ru l e i nd u ct i on
s ignal id entif ication
t i me s eries
S ou rce
[Ferrer and Mar t i n, 1995]
[Haynes et al . , 1995]
[Lay, 1994]
[Hamp o and Marko, 1992]
[Koza and Keane, 1990]
[Hinch l if f e et al ., 1996]
[McKay et al ., 1995]
[McKay et al ., 1996]
[Lay, 1994]
[A tkin and C oh en, 1993]
[A tkin and C oh en, 1994]
[Fras er and Ru s h , 1994]
[Gh anea-Hercock and Fras er, 1994]
[Ru s h et al ., 1994]
[D' h aes el eer and Bl u mi ng, 1994]
[Reynol d s , 1994a]
[Tayl or, 1995]
[Howl ey, 1997]
[Nord in and Banzh af , 1995c]
[Reynol d s , 1992]
[Fagl ia and Vet t u ri , 1996]
[Banzh af et al ., 1997a]
[Bennet t I I I , 1997]
[I ba, 1997]
[Reynol d s , 1994b]
[Hand l ey, 1993b]
[Hand l ey, 1994b]
[S p ector, 1994]
[Bal akri s h nan and Honav ar, 1996]
[Koza, 1992a]
[Lott, 1994]
[Koza, 1992b]
[Ros s et al ., 1996]
[Dain, 1997]
[S p encer, 1993]
[S p encer, 1994]
[Howl ey, 1996]
[Dracop ou l os , 1997]
[Raymer et al . , 1996]
[Zh ang et al ., 1996]
[Hand l ey, 1995]
[Freitas , 1997]
[Tel l er and Vel os o, 1995c]
[Lee, 1995]
Table 12.4
GP applications overview,
cation. A s a p art i cu l ar examp l e wh ere it h as been ap p l ied s u cces s -
p
f u l l y, we s h al l d is cu s s t h e bi och emi s t ry d at abas e C O NS O LV contain-
ing d at a on wat er mol ecu l es bou nd t o a nu mber of p rot ei ns .
Us ing t h e cl as s if ication tech niqu e of K-neares t neigh bors (Knn)
and a GP s ys t em t o f eed t h i s cl as s if ication s ch eme, a v ery s u cces s f u l
f eatu re anal ys is can be d one res u l ting in an id entif ication of i mp or t ant
f eatu res as wel l as a good cl as s if ication of u nt rai ned d at a entries .
Th e au t h ors of t h i s s t u d y d id earl ier work u s ing a genetic al go-
r i t h m f or t h e s ame t as k [Pu nch et al ., 1993] bu t concl u d ed t h at GP
wou l d be bet t er s u ited f or t h e goal s t o be ach iev ed . O ne i mp or t ant
EH
12 Appl i cati ons of Genetic Programmi ng
A p p l i cat i on d omai n
el ectrical engi neeri ng
circu it d es ign
f inancial mar ket
h ybri d s
i mage p roces s i ng
i nt eract i v e ev ol u t i on
Year
1997
1994
1996
1996
1994
1997
1994
1996
1996
1996
1994
1996
1997
1995
1994
1994
1996
1997
1996
1996
1996
1997
1994
1994
1994
1997
1994
1995
1996
1996
1996
1996
1996
1993
1995
1996
1997
1994
1995
1994
1994
1992
1991
1992
1993
A p p l i cat i on
anal og s ou rce id entif ication circu it
circu it d es ign
circu it d es ign
circu it d es ign
circu it s imp l if ication
control l er circu it
ev ol v abl e h ar d war e
f acil ity l ayou t
d ecis ion d i agrams
bargai ni ng
h ors e race p red i ct i on
h yp ot h es i s
i nv es t ment beh av i or
s h are p red i ct i on
s t rat egi es
t r ad e s t rat egi es
t r ad e mod el s
v ol atil ity mod el s
cel l u l ar au t omat a ru l es
f u zzy l ogic control l ers
L-s ys t ems
l earni ng ru l es
neu ral net work t rai ni ng
neu ral net work t rai ni ng
neu ral net work t r ai ni ng
neu ral net work t rai ni ng
regu l ar l angu ages
anal ys i s
anal ys i s
cl as s if ication
comp res s i on
comp res s i on
ed ge d et ect i on
f eat u re ext r act i on
f eat u re ext r act i on
f eat u re ext r act i on
image enh ancement
magnet i c res onance image p roces s i ng
recogni t i on
s t r u ct u r e of nat u r al images
v is u al rou t i nes
d ynami cal s ys t ems
i nt eract i v e image ev ol u t i on
p r oced u r al mod el s
p roced u ral mod el s
S ou rce
[Koza et al ., 1997b]
[E h renbu rg and v an Maanen, 1994]
[Koza et al . , 1996a]
[Koza et al ., 1996b]
[C oon, 1994]
[Koza et al ., 1997a]
[Hemmi et al ., 1994a]
[Garces -Perez et al ., 1996]
[Drech s l er et al ., 1996]
[Dworman et al ., 1996]
[Perry, 1994]
[C h en and Yeh , 1996]
[Lens berg, 1997]
[Robins on and Mcl l roy, 1995a]
[A nd rews and Pr ager , 1994]
[Lent, 1994]
[O u s s aid ene et al ., 1996]
[C h en and Yeh , 1997]
[A nd re et al ., 1996b]
[A l ba et al ., 1996]
[Jacob, 1996b]
[S egov ia and I s as i, 1997]
[Bengio et al ., 1994]
[Gru au , 1994b]
[Zh ang and Mu eh l enbei n, 1994]
[E s p arcia-A l cazar and S h ar man, 1997]
[Du nay et al ., 1994]
[Robins on and Mcl l roy, 1995b]
[Bers ano-Begey et al ., 1996]
[Zh ao et al ., 1996]
[Jiang and Bu t l er, 1996]
[Nord in and Banzh af , 1996]
[Harris and Bu xt on, 1996]
[Tackett, 1993]
[Daid a et al ., 1995]
[Daid a et al ., 1996b]
[Pol i and C agnoni , 1997]
[Th ed ens , 1994]
[Tel l er and Vel os o, 1995a]
[Gord on, 1994]
[Joh ns on et al ., 1994]
[S ims , 1992a]
[S ims , 1991a, S ims , 1991b]
[S ims , 1992b]
[S ims , 1993b]
Table 12.5
GP applications overview,
part III
s trength of th eir meth od , th e au th ors cl aim, is th at it is u s ef u l in
nois y env ironments [Pei et al ., 1995].
Genetic al gorith ms can d o an op timization bas ed on a l inear
weigh ting of f eatu res , wh ereas genetic p rogramming can d o non-l inear
weigh ting and an ad ju s tment of th e f u nction [Raymer et al ., 1996].
Task Th e tas k Raymer et al . cons id ered was to generate a good s cal -
ing of f eatu res f or a Knn cl as s if ier of d ata entries in th e bioch emical
d atabas e C O NS O LV. Th is d atabas e contained d ata on th e env iron-
ment of a s et of 1700 rand oml y s el ected water mol ecu l es bou nd to
12.3 Science-Oriented Appl i cati ons of GP Bt iU
A p p l i cat i on d omai n
mod el l i ng
nat u r al l angu ages
op t i mi zat i on
p at t er n recogni t i on
s ignal p roces s ing
Year
1995
1995
1997
1995
1995
1994
1995
1994
1994
1996
1997
1994
1996
1994
1996
1996
1995
1994
1994
1996
1997
1995
1994
1994
1994
1996
1996
1993
1994
1996
1997
1997
1994
1994
1996
1996
1996
1996
1992
1996
1993
1993
1996
A p p l i cat i on j S ou rce
biotech nol ogical f ed -bat ch f erment at i on
macro-mech ani cal mod el
met al l u rgi c p roces s mod el
mod el id entif ication
mod el i nd u ct i on
s p at i al i nt eract i on mod el s
s ys t em id entif ication
conf id ence of t ext cl as s if ication (R)
l angu age d ecis ion t rees
l angu age p roces s ing
s ens e cl u s t eri ng
d at abas e qu ery op t i mi zat i on
d at abas e qu ery op t i mi zat i on
j ob s h op p robl em
mai nt enance s ch ed u l ing
net work (LA N)
rai l road t rack mai nt enance
t r ai ni ng s u bs et s el ection
cl as s if ication
cl as s if ication
cl as s if ication
d ynami cs ext r act i on
f eat u re ext r act i on
f il tering
combu s t i on engi ne mis f ire d et ect i on
magnet i c res onance d at a cl as s if ication
myoel ectric s ignal recognition
nois e f il tering
op t i cal ch aract er recogni t i on
object cl as s if ication
object d et ect i on
p rep roces s i ng
s ignal f il tering
t ext cl as s if ication
t ext cl as s if ication
t i me s eries
t i me s eries p red i ct i on
v is ibil ity gr ap h s
control v eh icl e s ys t ems
d i gi t al
s ignal f il tering
s ignal mod el i ng
wav ef orm recognition
[ Bet t enh au s en et a] . , 1995b]
[S ch oenau er et al ., 1995]
[Greef f and A l d rich , 1997]
[S ch oenau er et al ., 1996]
[Babov ic, 1995]
[O p ens h aw and Tu r t on, 1994]
[I ba et al ., 1995b]
[Mas and , 1994]
[S iegel , 1994]
[Du nning and Dav is , 1996]
[Park and S ong, 1997]
[Kraf t et al ., 1994]
[S til l ger and S p il iop ou l ou , 1996]
[A tl an et al . , 1994]
[Langd on, 1996a]
[C h oi, 1996]
[Grimes , 1995]
[Gat h ercol e and Ros s , 1994]
[Tackett and C ar mi , 1994]
[A brams on and Hu nt er , 1996]
[Gray and Maxwel l , 1997]
[Dzeros ki et al ., 1995]
[A nd re, 1994a]
[O akl ey, 1994b]
[Hamp o et al ., 1994]
[Gray et al ., 1996b]
[Fernand ez et al ., 1996]
[O akl ey, 1993]
[A nd re, 1994b]
[Ryu and E ick, 1996]
[Winkel er and Manj u nat h , 1997]
[S h errah et al ., 1997]
[O akl ey, 1994a]
[Mas and , 1994]
[C l ack et al ., 1996]
[Mas and and Pi at es ky- S h ap i r o, 1996]
[Mu l l oy et al ., 1996]
[Veach , 1996]
[Hamp o and Marko, 1992]
[E s p arci a-A l cazar and S h ar man, 1996]
[O akl ey, 1993]
[S h arman and E s p arci a-A l cazar, 1993]
[Fernand ez et al ., 1996]
Table 12.6
GP application s overview,
20 d if f erent p rot ei ns . Fou r f eatu res were u s ed t o ch aract eri ze each of part IV (R mean s
t h e wat er mol ecu l es in t h ei r l igand -f ree s t ru ct u re: repeated )
1. t h e crys tal ograp h ic t emp er at u r e f actor, cal l ed t h e B-v al u e
2. t h e nu mber of h yd rogen bond s between t h e wat er mol ecu l e and
t h e p rot ei n
3. t h e nu mber of p rot ei n at oms p acked arou nd t h e wat er mol ecu l e,
cal l ed t h e at omi c d ens ity
4. t h e t end ency of t h e p rotein at oms t o at t r act or rep el t h e wat er
mol ecu l e, cal l ed t h e h yd rop h il icity
KIM 12 Appl icat ions of Ge ne t i c Pr og r a mmi n g
Bas ed on th os e f eatu res of t h e l igand -f ree conf igu ration, t h e wat er
mol ecu l es bi nd i ng t o activ e s ites were cl as s if ied into cith er con served
or displaced, p red i ct i ng wh et h er t h ey p art i ci p at e in l igand -activ e s ite
bi nd i ng (con served) or not (displaced). Th e au t h ors cl aimed t h at ,
if t h e activ e-s ite wat er mol ecu l es cou l d be cl as s if ied correctl y and
t h u s p red i ct ed , t h i s wou l d h av e broad ap p l i cat i ons in biotech nol -
ogy [Raymer et al ., 1996]. From t h e 1700 water mol ecu l es in t h e
d at abas e, onl y 157 were bi nd i ng t o t h e activ e s ite, and th os e were
u s ed t o p art i ci p at e in t rai ni ng of t h e s ys t em.
Fi gu re 12.1 s h ows t h e id ea beh i nd s cal ing of f eatu res f or Knn
cl as s if ication. Th e s cal ing is d one in ord er t o maxi mi ze cl as s if ication
correctnes s in t h e t rai ni ng s et. Val id ation is d one u s ing a s ep arat e
p ar t of t h e d at abas e t h at h as not been inv ol v ed in t h e t rai ni ng.
Figure 12. 1
Scaling of the x-axis
(B-value) changes the
classification of the water
in question.
t
I
1
2 V
)
l
r
e
a
t
/
/
v
\
s
O
^^
\
\
/
J
y
^
D
S
s
c
<s
(
A
t
o
I
1
/
/
/
/
\
V
V
D
^
v ^ _
\
\
1
^y
n
n
n
Featu re 2 (B-v al u e) Featu re 2 (B-v al u e)
System Structure
GP Elements
Th e GP s ys t em ev ol v es f u nctions t h at map t h e original v al u es of
t h e f eatu res into v al u es al l owing bet t er s ep arabil ity of t h e p at t er ns
and , th eref ore, bet t er cl as s if ication of t h e wat er mol ecu l es . Th e entire
s ys t em cons is ting of a GP mod u l e map p i ng t h e f eatu res into t h e Knn
cl as s if ier mod u l e is d ep icted in Fi gu re 12.2. I np u t t o t h e s ys t em
are t h e original f eatu res s t ored in t h e d at abas e as wel l as t h e correct
cl as s if ication res u l ts exp ect ed f rom t h e Knn cl as s if ier. Th es e are t h en
u s ed as a qv ial ity meas u re f or t h e GP s ys t em' s map p i ng (s cal ing) of
t h e f eatu res accord ing t o Fi gu re 12.2.
Raymer et al . u s ed t h e bas ic ari t h met i c f u nctions +, , *, % as
t h e f u nction s et of t h e GP mod u l e. Th e t ermi nal s cons is ted of t h e
original f eatu res t o be map p ed and of r and om ep h emeral cons t ant s .
A p ecu l iarity of t h ei r work was t h at each tree of t h e genetic p ro-
grammi ng p op u l at i on cons is ted of 4 s u bt rees , corres p ond i ng t o t h e
f ou r f eatu res t o be map p ed . I n ord er t o mai nt ai n th os e s u bt rees d u r-
ing ev ol u tion, t h ey were cod ed as A DFs t o be cal l ed by t h e mai n tree.
Th e f itnes s meas u re was s imp l y t h e d egree of correct cl as s if ication by
a Knn wi t h K = 3 among t h e 1700 water mol ecu l es , incl u d ing 157
activ e-s ite bi nd i ng water mol ecu l es .
12. 3 Sci e nce -Or i e nt e d Appl icat ions of GP
Target Classification
1
Classification Result
n
GP System KNN Classifier
Figure 12.2
A system for improved
Knn classification
Input features
Th e GP r u n was d one u s ing a r amp ed h al f -and -h al f initial iza-
tion and t h e conv ergence t ermi nat i on criterion or t h e generat i on
l imit giv en bel ow. Th e f ol l owing p ar amet er s were ch os en: P =
100; G
max
= 300; p
c
= 0.9; MDP = 17; MDP
mit
= 6. Raymer
et al . rep ort imp rov ed p erf ormance of t h e cl as s if ier and th eref ore im-
p rov ed p red i ct i on accu racy of t h e GP s ys t em ov er a comp arabl e s ys -
t em u s ing a genetic al gori t h m as f eatu re-s cal ing d ev ice. Th e ov eral l
cl as s if ication r at e on al l 157 activ e-s ite water mol ecu l es ros e f rom
77% t o 79%. Th e au t h ors cl aim t h i s t o be a v ery good res u l t giv en
t h e d if f icu l ty of reach ing more t h an 70% accu racy f or p rot ei n s ec-
ond ary s t r u ct u r e p red iction f rom ab in itio or knowl ed ge-bas ed met h -
od s [Meh ta et al ., 1995] [Ros t and S and er, 1993].
Th e f ou r f eatu res were map p ed d if f erentl y, wi t h an ov eral l in-
creas e in i mp ort ance giv en t o t h e f irs t and t h i rd . For i l l u s t rat i on
p u rp os es , Fi gu re 12.3 s h ows one of t h e d ev el op ed non-l inear map -
p ings of f eatu res f or at omi c d ens ity. Th e s cal ing was d one af ter t h e
original f eatu res were normal ized t o t h e interv al [1,10]. Th e comp u -
t at i on t i me p er generation was abou t 15 mi nu t es on a S UN S PA RC
502.
Results
12. 3. 2 Sequence Pr obl ems
I n many areas of s cience, t h ere are p robl ems wi t h s equ ences of in-
f ormation carriers . Th es e s equ ences migh t come abou t as t h e res u l t
of t emp or al p roces s es or migh t be generat ed in t h e cou rs e of t rans -
f orming s p at i al d i s t ri bu t i ons i nt o a f orm t h at can be s u bj ect ed t o
s equ ence anal ys is . Th e v ery p roces s by wh ich you read t h es e l ines is
s u ch a cas e. Du ring t h e p roces s of read ing t ext we are t rans f ormi ng
Problem Domain
ESS
12 Applications of Genetic Programming
Figure 12.3
A GP-evolved function
for the B-value with a
Knn ofK = 3. It
approximately follows a
f(x) x
3
function.
([Raymer et al., 1996],
copyright MIT Press,
reproduced with
permission)
2.58+31
28* 31
1.58+31
1a+31
5e+30
0
-5e+30
-1e+31
-1.58+31
28+31
-2s+31
GP function for B-Vaiue
\ _
-
Feature 2: B-Value
\ -
s p at i al p at t er ns (d ot p at t er n on p ap er) into a s p at i o-t emp oral f orm
t h at ou r brai n can p roces s .
A gl imp s e of t h e u bi qu i t y of s equ ence p robl ems is giv en h ere:
S p eech p roces s ing
C ommu ni cat i on in general
Langu age u nd ers t and i ng and t rans l at i on
A nal ys is of economic p robl ems
DNA p at t er n recognition
Ti me s eries anal ys is : p red iction of weat h er, et c.
S econd ary and t ert i ary p rot ei n s t r u ct u r e p red i ct i on
A s we can s ee, s equ ence p robl ems are wid es p read , and comp u t er
s cience and biol ogy contain es p ecial l y ch al l enging i ns t ances of t h es e
p robl ems . Th es e p robl ems h av e in common t h at t h e d at a t yp e of
s equ ence el ements is u s u al l y t h e s ame ov er t h e entire s equ ence. Th u s ,
wh et h er an el ement is at t h e beginning of t h e s equ ence or at t h e end ,
it wou l d h av e t h e s ame meani ng in eith er cas e. I n ot h er word s , t h ere
is p os itional i nd ep end ence or t rans l at i onal inv ariance as f ar as t h e
s emat i cs is concerned .
12.3 Science-Oriented Applications of GP
Hand l ey h as creat ed a s p ecial s et of f u nctions f or s ol v ing s equ ence
p robl ems [Hand l ey, 1996a] and ap p l ied th is s et t o two p robl ems f or
d emons t r at i on p u rp os es .
Th e t as k giv en by t h e anal ys is of s equ ences is u s u al l y s imp l y Task
t o recognize cert ai n p at t er ns in a s equ ence or t o comp are s equ ences
f or s imil arity wh en t h e nu mber of el ements t h at mi gh t exp res s t h at
p at t er n is not f ixed . A ccord ing t o Hand l ey, many mach i ne l earning
t ech ni qu es ap p roach t h e p robl em by f orcing t h e s equ ence into a f ixed
l engt h p at t er n, t h at is , by s l id ing a wind ow ov er t h e s equ ence. Th e
wind ow s ize t h u s d et ermi nes t h e s ize of t h e p at t er n, wh ich is now
f ixed in l engt h irres p ectiv e of t h e entire l engt h of t h e s equ ence. Han-
d l ey, i ns t ead , p rop os es a more f l exibl e ap p roach u s ing an ar bi t r ar y
or ad j u s t abl e wind ow s ize, u p t o t h e ext reme of t aki ng t h e inf l u ence
of t h e entire s equ ence into accou nt f or one s p ecif ic p at t er n.
Hand l ey' s GP s ys t em is a t rad i t i onal one, excep t t h at it is en- GP Elemen ts
h anced by h is s o-cal l ed s t at i s t i cal comp u t i ng-zone f u nction s et. Th es e
f u nctions may be d iv id ed into two cl as s es : conv ol u tion f u nctions and
s t at i s t i cal f u nctions .
C onv ol u tion f u nctions are f u nctions t h at comp u t e v al u es f rom
p ar t s of t h e s equ ence, i nd ep end ent l y of wh at t h e s ame conv ol u tion
f u nction h as comp u t ed on ot h er p ar t s of t h e s equ ence. Th e s i t u at i on
is d ep i ct ed in Fi gu re 12.4.
A' B" C
Typ i cal rep res entativ es of th os e conv ol u tion f u nctions are:
ari t h met i c f u nctions on s ingl e el ements or on s equ ences
Figure 12.4
The effect of a
convolution function on
a sequence. Values
are computed locally,
independently of the
computations for other
parts of the sequence.
cond itional branch es on s ingl e el ements or on s equ ences
s equ ence mani p u l at i on f u nctions , l ike s h if t l ef t or s h if t righ t
S t at i s t i cal f u nctions , on t h e ot h er h and , d o d ep end on t h e ap p l i-
cat i on of t h e s ame f u nction earl ier on in t h e s equ ence. A s a typ ical
i ns t ance, Hand l ey ment i ons a s u mmi ng op erat i on t h at ret u rns , at
t h e end of t h e s equ ence, t h e s u m of al l v al u es f ou nd on t h e s equ ence.
Unt i l t h e end , h owev er, t h i s f u nction r et u r ns p art i al s u ms onl y, wi t h
each p art i al s u m d ep end i ng on p art i al s u ms comp u t ed earl ier on. Th e
s i t u at i on is d ep icted in Fi gu re 12.5.
I cUi l 12 Applications of Genetic Programmi ng
Figure 12.5
The effect of a statistical
function on a sequence.
Values are computed
locally, but are dependent
on computations of the
same function earlier on
in the sequence.
A' B' C
Th e s t at i s t i cal f u nctions are bas ed on one i mp or t ant f u nction
cal l ed scz, wh ich inv erts t h e ord er of execu tion u s u al l y v al id in gene-
tic p rogrammi ng. I ns t ead of mov ing al ong a s equ ence and ev al u at i ng
t h e el ements in t h i s ord er, t h i s f u nction mov es ov er t h e s equ ence and
ev al u ates in t h e op p os i t e ord er. Th i s al l ows it t o t ake into accou nt
v al u es t h at s h ou l d be comp u t ed earl ier in t h e s equ ence wh en ev al u -
at i ng l at er p ar t s of t h e s equ ence. Th i s is s imil ar t o s toring v al u es in
regis ters in A I MGP wh en mov ing al ong t h e s equ ence.
Results I n one examp l e, Hand l ey ap p l ied t h i s newl y i nt rod u ced f u nction
s et t o a p robl em of amino-acid cl as s if ication in p rot ei ns . More s p ecif i-
cal l y, t h e qu es tion was t o p red ict t h e bu ried nes s of a p art i cu l ar ami no
acid in t h e s equ ence, a p robl em cl os el y rel ated to t ert i ary s t r u ct u r e
p red iction. Bu ried nes s h as t o d o wi t h t h e t end ency of an ami no acid
t o t r y t o h id e f rom wat er wi t h i n t h e p rot ei n f ol d or t o t r y t o be
exp os ed t o wat er at t h e s u rf ace.
Hand l ey u s ed 122 p rot ei ns f rom t h e Brookh av en Pr ot ei n Dat a
Bank [Berns tein et al ., 1977] and s ep arat ed t h em into t rai ni ng (60),
tes t (30), and ev al u t at i on (32) s ets . Ru ns were d one wi t h a 64-nod e
p aral l el mach i ne wi t h d enies of s ize 300, res u l ting in a t ot al p op -
u l at i on of 19 200 ind iv id u al s . E mi grat i on of 5% was al l owed p er
generat i on on a 2D toroid al mes h . Res u l t s rep ort ed by Hand l ey
[Hand l ey, 1996b] comp are v ery f av orabl y wi t h ot h er met h od s on t h e
s ame p robl em (al t h ou gh u s ing anot h er s et of p rot ei ns ). Pred i ct i on
accu racy was 90% f or t h e ev al u ation s et, mu ch bet t er t h an t h e ac-
12.3 Science-Oriented Applications of GP Bt HI
cu racy of 52% reach ed by Hol brook et al . u s ing a neu ral network
[Hol brook et al ., 1990] [Hol brook et al ., 1993].
12.3.3 Image Classification in Geoscience and Remote
Sensing
Dai d a et al . [Daid a et al ., 1996a] h av e i mp l ement ed an imp res s iv e
GP- s u p p or t ed image p roces s ing s ys t em f or t h e anal ys is of s atel l ite
r ad ar images in a geos cience ap p l ication. Th e objectiv es of t h ei r
work are:
1. t o d es cribe an i ns t ance of a comp u t er-as s i s t ed d es ign of an
image-p roces s ing al gori t h m wh ere t h e comp u t er as s is tance h as
a GP p ar t ,
2. t o p res ent one s ol u tion p rod u ced wi t h t h e h el p of GP comp o-
nent s , and
3. t o p res ent a s p ecial met h od f or f itnes s s p ecif ication u s ing l arge
d at a s ets .
Th e images come f rom t h e E RS (E u rop ean Remot e S ens ing S atel -
l ite) wh ich s cans t h e ear t h wi t h a rad ar cal l ed S A R (S ynt h et i c A p er-
t u r e Rad ar ) . Fi gu re 12.6 s h ows an examp l e image (1024 x 1024 p ix-
el s ).
Th e goal is t o d et ect p res s u re rid ges f rom images of ice in t h e
A rct i c S ea. A p res s u re rid ge can be t h e res u l t of f irs t-year ice bu ck-
l ing u nd er p res s u re f rom th icker, ol d er ice. To a v iewer on l ocation
t h e p res s u re rid ge may l ook l ike a 5-10 met er h igh , l ong h il l mad e of
s h at t er ed ice bl ocks . Th e p res s u re rid ges af f ect h ow t h e f l oating ice
mov es and d rif ts , wh ich is of interes t t o meteorol ogis ts , f or ins tance.
O n t h e r ad ar images , p res s u re rid ges ap p ear, at bes t , as l ow-contras t
bri gh t er cu rv es or bl obs , wh ich are v ery t i me cons u mi ng and t ed i ou s
t o ext r act by h and . Th e p r i mar y goal is , th eref ore, t o f ind an au t o-
mat i c al gori t h m t h at can ext ract t h es e d if f u s e f eatu res d irectl y f rom
s atel l ite images .
Dai d a et al . u s e t h e scaffoldin g t o d es cribe a s ys t em t h at as s is ts
in al gori t h m d es ign and t h at f eatu res GP as an es s ential comp onent .
Th e reas on f or u s ing a s ys t em f or al gori t h m d es ign is p art l y t h at t h e
good nes s criterion or f itnes s f u nction is not eas y t o d ef ine f or p res s u re-
rid ge ext ract i on. E xp er t s may agree on wh ere a p res s u re rid ge is on a
r ad ar image, bu t t h ey l argel y d is agree on wh at d ef ines s u ch a f eatu re
in general . Hence, it is h ard t o j u s t d ef ine a f itnes s criterion and t h en
u s e a GP s ys t em f or t h e al gori t h m d es ign. I ns t ead , t h e s ys t em u s es
an interactiv e cycl e f or d es igning t h e al gori t h m, i l l u s t rat ed in Fi gu re
12.7.
12 Appl icat ions of Genet ic Pr og r a mmi n g
Figure 12.6
Example target bitmap
([Daida et ai, 1996a],
copyright MIT Press,
reproduced with
permission)
'&*> "If-5
Figure 12. 7
Diagram of scaffolded GP
system
([Daida et ai, 1996b],
copyright MIT Press,
reproduced with
permission)
Output Imagi
Input Image
\
H .
Texture
Filtering TQ
Texture
Filtering T w
1
Select
Channels
I i
Select
Test Points
Input Image B
Texture
Filtering TQ
Texture
- * Filtering T. .
Select GP
Parameters
Select Test
Subimage(s)
12.3 Science-Oriented Appl i cati ons of GP
Th e u s er s el ects t h e t ermi nal and f u nction s et t oget h er wi t h tes t
images , a f itnes s f u nction, and GP p ar amet er s . Wh en t h e GP s ys t em
t er mi nat es , t h e bes t i nd i v i d u al is t es t ed on a f u l l image, and an ex-
p er t j u d ges its p erf ormance. Th es e s tep s are r ep eat ed u nt i l t h e GP
comp onent h as f ou nd an accep t abl e image-p roces s ing al gori t h m.
Th e t ermi nal s t h at can be u s ed in a t ermi nal s et rep res ent image
d at a and t ext u r e f il ters .
Th e f u nction s et comp onent s are t h e ari t h met i c op erat ors and t h e
cond i t i onal I f - Le s s - Th a n - o r - E q u a l - t o ( I FLTE ) . Th e op erat ors are
mod if ied s u ch t h at t h ey are cl os ed u nd er 8-bit ari t h met i c.
Th e f itnes s cal cu l ation is bas ed on manu al l y cl as s if ied s ingl e im-
age p oi nt s and on at t r i bu t es of th es e p oi nt s . Th e u s e of s u bimages
t u r ned ou t t o be t oo comp u t at i onal l y exp ens iv e ev en wh en s u bimages
were as s mal l as 8 X 8 p ixel s , and t h e res u l ts f ou nd d id not general ize
f or f u l l images . Th i s is t h e reas on f or u s ing manu al l y cl as s if ied s ingl e
i mage p oi nt s as f itnes s cas es . A t es t p oi nt is a v ector of v al u es . Th e
f irs t v al u e is a Bool ean qu ant i t y s imp l y giv ing t h e manu al l y cl as s i-
f ied ridge or n on -ridge p rop erty. Next comes t h e 8-bit p ixel -intens ity
v al u e of t h e tes t p oint f ol l owed by s ev eral intens ity v al u es f or t h e
image t h at h as been p roces s ed by a s el ection of t ext u r e f il ters . Th e
f itnes s is comp u t ed as t h e nu mber of h i t s ov er t h e cl as s if ication s et.
Th e f irs t work by Dai d a et al . in t h i s f iel d u s ed a f ixed t rai ni ng
s et. Lat er, bet t er res u l ts were ach iev ed u s ing a d ynami c t rai ni ng s et
t h at is ch anged d u ri ng ev ol u tion. Dai d a et al . d es cribe t h e met h od
and its res u l ts :
A GP s ys tem s tarts a ru n with a training s et t h at is rel ativ el y
s mal l and contains tes t p oints th at s h ou l d , in th eory, be eas y f or
th e al gorith m to s core wel l . Wh en an ind iv id u al s cores a certain
nu mber of h its , a few p oints are ad d ed to th e training s et u nd er
ev al u ation. Th is p roces s can continu e u ntil eith er an ind iv id u al
s cores a maximu m nu mber of h its or maximu m nu mber of gener-
ations h as been reach ed . Not onl y h as th is s trategy res u l ted in
a better ind iv id u al th an d es cribed in [Daid a et al ., 1995], bu t th e
ov eral l p roces s u nd er th is f itnes s f u nction h as been p rov en to be
more control l abl e th an wh en u s ing a s tatic training s et.
J. DA I DA E T A L., 1996
Th e met h od is ins p ired by t h e work of Gol d berg [Gol d berg, 1989]
and Hol l and [Hol l and et al ., 1986].
Th e res u l ts are encou raging wh en t h e bes t-of -ru ns i nd i v i d u al is
ap p l ied t o two f u l l t es t images . I n a qu al i t at i v e exami nat i on, it is
s h own t h at t h e ext r act ed f eatu res are v ery wel l correl at ed wi t h t h e
p res s u re-rid ge and ru bbl e f eatu res id entif ied by h u man exp ert s ; s ee
Fi gu re 12.8. Th es e res u l ts cons t i t u t e t h e f irs t au t omat i c ext ract i on of
| c j l 12 Applications of Genetic Programmi ng
p res s u re-rid ge f eatu res as l ow-contras t cu rv il inear f eatu res f rom S A R
imagery.
12.4 Computer ScienceOriented
Applications
12. 4. 1 Cellular Encoding of Ar t ificial Neur al Net wor ks
Problem Domain Gr u au h as at t acked t h e p robl em of au t omat i c generat i on of neu ral
networks u s ing a d ev el op ment al ap p roach . He reas oned t h at f or an
encod ing met h od t o be comp act and ef f icient, a mod u l ar ap p roach
mu s t be emp l oyed . His id ea was t o u s e mod u l ar d es crip tions of p ar t s
of neu ral networks t h at cou l d be u s ed rep eat ed l y in t h e cou rs e of
cons t ru ct i on (d ev el op ment) of a comp l et e and p res u mabl y comp l ex
neu ral network.
E arl ier work in t h e f iel d of d ev el op ment of comp l ex neu ral s ys t ems
[Mjol s nes s et al ., 1988] [Mjol s nes s et al ., 1995] [Kitano, 1990] h ad al -
read y d emons t r at ed t h e f eas ibil ity of gr ammar s . I n a s eries of p a-
p ers Gr u au p rop os ed and l ater ref ined a d ev el op ment al ap p roach
bas ed on grap h gr ammar s [Gru au , 1992b] [Gru au and Wh itl ey, 1993]
[Gru au et al ., 1994] [Gru au , 1995].
Task Th e t as k Gr u au cons id ered in one d emons t r at i on of t h e f eas ibil ity
of h is ap p roach is control l ing a s ix-l egged ins ect. E ach l eg h as a
nu mber of neu rons f or control : t h ree mot or neu rons and one s ens or
neu ron record ing t h e s t at u s of t h e l eg. Th e t as k is t o coord i nat e t h e
d if f erent neu rons on d if f erent l egs s o as t o end u p wi t h coord i nat ed
mot i on in v ariou s gaits .
I t is neces s ary t o al l ow f or recu rrent connections in t h e net work
d u e t o t h e p robl em of s toring s t at e inf ormation. E ach artif icial neu ral
12.4 Computer ScienceOriented Applications
network cel l cons is ts of i np u t and ou t p u t connections t o ot h er cel l s ,
t h u s it is t r eat ed as a d irected l abel ed grap h . Th e au t h or s imp l i-
f ies t h e concep t as mu ch as p os s ibl e in ord er t o be abl e t o generat e
d i rect ed grap h s .
Th e d ev el op ment al ap p roach comes in wh en Gr u au s p ecif ies a
l is t of grap h rewri t i ng ru l es t o be ap p l ied t o t h e cel l s . We h av e al -
read y s een a col l ection of grap h rewriting ru l es in Fi gu re 9.23. Th e
bas ic id ea is t o al l ow f or a d iv is ion of cel l s u nd er cons erv ation of
connections . A d d i ng, remov ing, and ch anging weigh ts are ot h er p os -
s ibl e rewri t i ng ru l es . O riginal l y, Gr u au h ad onl y bi nary weigh ts , bu t
recentl y h e h as ad d ed more f u nctional ity t o t h e weigh ts .
Th e rewri t i ng ru l es s p ecif ied in t h i s way are encod ed as a t ree
and ap p l ied in a ch os en ord er t o arriv e at a f u l l y d ev el op ed neu ral
net . Fi gu re 12.9 s h ows a s amp l e wi t h t h ree d if f erent trees wh ich are
ap p l ied rep eated l y.
Tree 1 Tree 2 Tree 3
Figure 12. 9
Sample cellular code,
designed by hand, r i l
means that the next tree
in order from left to right
is to be applied at that
position. Capital letter
nodes refer to rewriting
rules of Figure 9.20.
Th e d ev el op ment of t h e neu ral network is s h own in Fi gu re 12.10.
Keep in mi nd , h owev er, t h at t h e ru l es are h and -d es igned f or t h i s
d emons t rat i on, t h u s a h igh l y s ymmet ri c s ol u tion res u l ts .
Genetic p rogrammi ng is now emp l oyed t o ev ol v e s ol u tions s imil ar GP Elemen ts
t o Fi gu re 12.10 bu t s t art i ng f rom r and om rewriting ru l es and , h ence,
f rom r and oml y d ev el op ed neu ral net s . Becau s e t h e p roces s is comp u -
t at i onal l y exp ens iv e, Gr u au i mp l ement ed t h e al gori t h m on a MI MD
mach i ne (I PS C 860 wi t h 32 p roces s ors ) as an is l and mod el wi t h 2D
toru s -l ike top ol ogy. A f ter t h e s t ru ct u re was d ev el op ed , a s t och as t i c
h il l cl imbing al gori t h m was ap p l ied to t h e weigh ts of t h e neu ral net .
Gr u au u s ed a p op u l at i on s ize of 32 x 64 ind iv id u al s .
Gr u au f ou nd networks of t h e kind s h own in Fi gu re 12.11. Th e Results
l ef t examp l e u s es an ad d i t i onal ref inement cal l ed automatic defin ition
t Hl
12 Appl i cati ons of Genetic Programmi ng
Lay ou t of th e inp u t and ou tp u t u nits
Figure 12. 10
The development of a
neural network specified
through rules of Figure
12.9 ([Gruau, 1995],
copyright MIT Press,
reproduced with
permission)
of subn etworks wh ich is t h e cel l u l ar encod ing v ers ion of A DFs . I t
can be s een cl earl y t h at s u ch a network need s f ewer nod es and h as
a more ord ered s t r u ct u r e t h an t h e s imp l e ap p roach of Fi gu re 12.11
(righ t). Th e res u l ting networks are s imil ar t o t h e ones s een p rev iou s l y
[Beer and Gal l agh er, 1992].
12.4 Computer Sci ence-Ori ented Applications
A BPl PE P I A E P2 PE P2 A E P3 PE P3 A E PJ PE P4 A E PS PE PS A E P6 PE P*
PS1 RSI PS2 RS2 PS3 RS3 PS4 RS4 PS5 RS5 PS6 RS6
Figu re 12.11
GP-evolved solutions:
(left) including ADSN,
(right) without ADSN
([Gruau, 1995], copyright
MIT Press, reproduced
with permission)
Gr u au cl aims t h at h is met h od is wel l s u ited f or p robl ems wi t h
regu l arities in t h em. C el l u l ar encod ing can d is cov er th os e regu l ari-
ties and exp l oit t h em in t h e cou rs e of t h e d ev el op ment of a s u i t abl e
s ol u tion.
12. 4. 2 Devel opment and Evol ut ion of
Har dwar e Behaviors
Hemmi et al . d es cribe an ap p l i cat i on f rom t h e d omai n of circu it s yn-
th es is [Hemmi et al ., 1994a]. Th e au t h ors d o not rep ort on a real -
worl d ap p l i cat i on, bu t on a cont ri bu t i on - wi t h GP-l ike means - t o
a f iel d t h at wil l become h igh l y p ractical l y rel ev ant: h ard ware ev ol u -
tion. Th i s work is a s t ep toward h ard ware t h at may s el f -ad ap t its
beh av ior wi t h res p ect t o an env i ronment .
Th e au t h ors p res ent a p roces s t h at cons is ts of a d ev el op ment al
and an ev ol u tionary p h as e. Hardware description lan guage (HDL)
p rograms get d ev el op ed and ev ol v ed , wh ich rep res ent h ard ware s p ec-
if ications , wh ich u l t i mat el y rep res ent beh av ior of circu itry.
I n t h e d ev el op ment al p h as e, a p rogram gets "grown" f rom a s t ar t
s ymbol by u s ing a rewri t i ng s ys t em. Beginning wi t h t h e s t ar t s ym-
bol , t h i s s ys t em p rod u ces a t ree s t ru ct u re by u s ing p rod u ct i on ru l es .
Th e s t ar t s ymbol corres p ond s t o a zygote wh il e t h e s equ ence of l eaf s
p rod u ced corres p ond s t o t h e mu l ti-cel l u l ar organis m, in t h i s cas e a
p rogram. Th e au t h ors t er m t h i s t ree a ch romos ome s ince it rep res ents
t h e f inal p rogram.
I n t h e ev ol u tionary p h as e, ch romos omes may be s u bject t o mu -
t at i on and cros s ov er, mu ch l ike tree s t ru ct u res in common GP ap -
p roach es . Fi t nes s ev al u ation is p erf ormed by conv erting a ch romo-
s ome into a p rogrammabl e-l ogic d ev ice (PLD) p rogram wh ich mod -
if ies a PLD s u ch t h at it rep res ents t h e circu itry d es cribed by t h e
ch romos ome. Th i s circu itry can t h en be ev al u ated wi t h res p ect t o
its beh av ior. Th i s ev al u ation can be u s ed t o as s ign a f itnes s t o t h e
corres p ond i ng ch romos ome.
12 Appl i cati ons of Genetic Programmi ng
Final l y, by u s ing t h i s met h od , t h e au t h ors ev ol v e a bi nary ad d er
circu it t h at p rod u ces t h e bi nary s u m of two i np u t v al u es .
12. 4. 3 Int rusion Det ect i on
C ros bie et al . rep ort on a p r ot ot yp e in t h e d omai n of comp u t er s ys t em
d ef ens e [C ros bie and S p af f ord , 1995]. Du e t o t h e h igh connectiv ity
bet ween s ys t ems worl d wid e, t h ere is h igh p ot ent i al f or an intru s ion
into a s ys t em. I n general , an i nt ru d er aims at get t i ng acces s t o and
control ov er t h e s ys t em in ord er t o p erf orm an activ ity t h at is d el e-
teriou s t o t h e s ys t em' s f u nctional ity or t o a u s er, l ike d el eting s ys t em
f il es or acces s ing cl as s if ied inf ormation.
A common intru s ion d et ect or is a central u ni t wat ch i ng t h e com-
p l et e s ys t em f or intru s ion. Th e au t h ors p rop os e a d ecentral ized d e-
t ect i on ap p roach : au t onomou s s of tware agents wat ch t h e s ys t em -
each of t h em obs erv ing j u s t a s ys t em part - and each of t h em l earns
t o d et ect a p ot ent i al i nt ru s i on rel at ed t o t h e obs erv ed p ar t . Th es e
agents are ev ol v ed by genetic p rogrammi ng.
Th e d ecentral ized ap p roach h as s ev eral ad v ant ages ov er t h e cen-
t r al ap p roach , accord ing t o t h e au t h ors . Two i mp or t ant ones f ol l ow.
Fi rs t , a s ys t em ch ange can be eas il y ans wered by a ch ange in t h e nu m-
ber and p ot ent i al s p eciation of agent s . I n cont ras t t o t h i s , a central
ap p roach mi gh t requ ire a h igh ef f ort in red es igning t h e d et ect or.
S econd , a cent ral d et ect or t h at gets conqu ered by an i nt ru d er is
not onl y u s el es s bu t actu al l y v ery d angerou s t o t h e s ys t em, s ince it
wil l p rov id e inf ormation s ignal ing non-exis tent s ys t em s af ety t o t h e
ad mi ni s t rat or. Howev er, a s ingl e s u bv ert ed s of tware agent corru p t s
j u s t a t i ny p ar t of t h e comp l et e d ecentral ized d et ect or. Th u s , t h e
d et ect or s t ays f u nctional - al t h ou gh wi t h d ecreas ed ef f ectiv enes s .
Detector-A gen t Design Th e red l ine in t h e d es ign of d et ect or agents is concent rat i on and
inter-agent commu ni cat i on. A s ingl e agent f ocu s es on one or j u s t a
f ew as p ect s of intru s iv e activ ity. I f it d et ect s a p ot ent i al intru s ion,
it commu ni cat es t h i s ci rcu ms t ance t o al l ot h er agent s , wh ich wil l
mod if y t h ei r op erat i on accord ingl y. I f t h e commu ni cat i on activ ity
between agents reach es a cert ai n d egree - s o t h at t h e p robabi l i t y of
an act u al intru s ion is rat h er h igh - t h i s may be commu ni cat ed t o
a h u man agent, f or i ns t ance, a s ys t em ad mi ni s t rat or. O f cou rs e, a
s ingl e agent may wrongl y as s es s a cert ai n act i v i t y s equ ence - l ike
two cons ecu tiv e f ail ed l ogin trial s t o t h e s ame u s er accou nt - as an
intru s ion trial . Howev er, t h i s s ingl e mis inf ormation wil l not make it
t o t h e ad mi ni s t rat or. Th u s , a s ingl e "p aranoi d " agent cannot d i s t u rb
t h e s ys t em p erf ormance.
To d et ect intru s iv e activ ity, an agent s cans s ys t em au d i t d at a, l ike
l ogin t ri al s or f tp connections . For f itnes s ev al u ation, s ev eral s cenar-
12.4 Computer Sci ence-Ori ented Applications
ios get p res ent ed t o each agent. E ach s cenario cons is ts of p ot ent i al l y
intru s iv e and l egi t i mat e activ ities , and it h as a cert ai n act u al p roba-
bil ity t h at it rep res ents an intru s ion. Bas ed on t h i s p robabi l i t y and
t h e agent ' s as s es s ment of t h i s p robabil ity, t h e agent gets a cert ai n
f itnes s v al u e.
A ctu al l y, t h e p r ot ot yp e ap p l ication s u cceed s in ev ol v ing an agent
t h at cl as s if ies two of t h ree s cenarios correctl y. C ertainl y, t h e u nd er-
l ying concep t h as t o be ext end ed and t es t ed more intens iv el y, bu t t h e
p r ot ot yp e res u l ts i nd i cat e a p ot ent i al f or f u tu re GP-bas ed d et ect i on
s ys t ems .
12. 4. 4 Aut opar al l el izat ion
Wal s h et al . rep ort on an ap p l ication f rom t h e d omai n of s of tware en-
gineering [Wal s h and Ryan, 1996]. C ons id ering t h e h u ge bod y of s e-
rial s of tware, an au t omat i c p aral l el ization of s erial p rograms is h igh l y
rel ev ant. Th e au t h or s p res ent PA RA GE N, a GP-bas ed s ys t em f or au -
top aral l el ization of s erial s of tware. Th e s ys t em' s goal is t o t rans f orm
a s erial p r ogr am into a f u nctional l y equ iv al ent h igh l y p aral l el p ro-
gram. To t h at end , PA RA GE N tries t o reas s embl e a p aral l el p rogram
f rom t h e s t at ement s of t h e s erial p rogram s u ch t h at t h e p aral l el p ro-
gram p erf orms f as t and correctl y.
A n ind iv id u al is a p ars e t ree. E ach s t at ement f rom a s erial p ro-
gram rep res ent s a t ermi nal . Fi t nes s ev al u ation works in two ways :
f itnes s ref l ects bot h a d egree of f u nctional equ iv al ence and a d egree
of p aral l el is m.
A n ev ol v ed ind iv id u al , rep res enting a p ot ent i al l y f u nctional l y e-
qu iv al ent p aral l el v ers ion of a s erial p rogram, gets execu ted f or s ev eral
d if f erent initial izations of t h e v ariabl es u s ed in t h e s erial p rogram.
Th e s erial p r ogr am gets execu ted u s ing t h e s ame initial izations . Th e
s mal l er t h e d if f erences bet ween t h e corres p ond ing res u l ts are, t h e
bet t er is t h e p aral l el izing ind iv id u al wi t h res p ect t o f u nctional equ iv -
al ence.
Fu rt h ermore, t h e d egree of p aral l el is m gets ev al u ated . Th e f as ter
t h e p aral l el v ers ion p erf orms , t h e bet t er is t h e p aral l el izing ind iv id u al
wi t h res p ect t o generat i ng a h igh d egree of p aral l el is m. Th u s , a
bal ance bet ween correctnes s and good p aral l el ity gets es tabl is h ed in
a p op u l at i on.
P A RA GE N was t es t ed on common p robl ems f rom t h e d omai n of
p aral l el ization. Th e au t h ors rep ort on a s u cces s f u l t rans f ormat i on
of al l corres p ond ing s erial p rograms , u s ing a p op u l at i on s ize of 100
ind iv id u al s ov er 10 generations . A n examp l e f ol l ows . Wh en execu t-
ing as s ignment s t at ement s t h at s h are v ariabl es , execu tion ord er is
12 Applications of Genetic Programming
cru cial . C ons id er t h e f ol l owing s equ ence of as s ignment s t at ement s
5 2 , 5 5 , 5 6 , 5 8 .
f o r i : =l t o n d o
be gi n
S 2: f [ i ] := 57;
S 5: b [ i ] := a [ i ] + d [ i ] ;
S 6: a [ i ] := b [ i ] + 2;
S 8: c [ i ] := e [ i - l ] * 2 ;
end ;
O bv iou s l y, t h e s equ ence 55, 56 is critical , s ince its s t at ement s s h are
t h e array v ariabl es a and b wi t h id entical ind ex i. Th u s , in gen-
eral , t h i s s equ ence wil l res u l t in d if f erent v al u es f or a[i],6[i] t h an t h e
s equ ence 56, 55. Th eref ore, wh en p aral l el izing t h e abov e cod e, P A R-
A GE N mu s t p rod u ce p aral l el cod e t h at ens u res t h e execu tion ord er
55, 56. I nd eed , t h e s ys t em comes u p wi t h
DoAcross i := 1 to n
begin
PAR-BEGIN
S 8: c [ i ] := e [ i - l ] * 2 ;
S 5: b [ i ] := a [ i ] + d [ i ] ;
PA R-E ND
PA R-BE GI N
S 2: f [ i ] := 57;
S 6: a [ i ] := b [ i ] + 2;
PA R-E ND
end ;
Th e s emant i cs of PA R-BE GI N. .PA R-E ND is t o execu t e al l s t at ement s
bet ween t h es e two keyword s in p aral l el . DoA cros s l oop s ov er t h e
sequen ce of PA R bl ocks . Not e h ow t h i s cod e ens u res t h e execu tion of
55 p rior t o t h e execu tion of 56 yet al s o p aral l el izes execu tion.
Th e au t h ors p l an t o f ocu s f u rth er work on maki ng PA RA GE N
generat e O C C A M cod e - O C C A M is a p romi nent p aral l el l angu age -
and on h av ing it generat e p aral l el p rograms d irectl y ou t of a p robl em
d es crip tion.
12. 4. 5 Confidence of Te xt Cl assification
Th e f l ood of inf ormation p ou ri ng ov er u s is increas ing by t h e d ay. We
s p eak abou t t h e inf ormation s ociety wh ere inf ormation is t h e mai n
commod i t y t r ad ed . O ne of t h e bigges t, p robl ems in t h e inf ormation
s ociety is h ow t o s ort and d i s cri mi nat e inf ormation t h at is i nt eres t i ng
and rel ev ant t o you and you r work. S ev eral comp anies of f er s erv ices
12.4 Computer Sci ence-Ori ented Applications
wh ere inf ormation is cl as s if ied and giv en keyword s accord ing t o con-
t ent s . Th e keyword s can t h en be u s ed t o comp il e mat eri al of interes t
f or d if f erent grou p s . O ne s u ch p rov id er is Dow Jones , wh ich d ail y
as s igns keyword s or cod es t o s ev eral t h ou s and t ext s . Th e t ext s come
f rom many d if f erent s ou rces , l ike news p ap ers , magazines , news wires ,
and p res s rel eas es . Th e l arge v ol u me of t ext s makes it i mp ract i cal or
imp os s ibl e f or Dow Jones ' ed itors t o cl as s if y it al l wi t h ou t comp u t er
s u p p or t .
O ne s u ch s u p p ort s ys t em u s es a memory-based reason in g tech -
niqu e (MBR) [Das rath y, 1991] f or as s igning keyword s au t omat i cal l y
t o articl es . Howev er, it is d es irabl e t h at t h e au t omat i c s ys t em can in-
d i cat e wh ich cl as s if ication it is u ncert ai n of and t h en cal l f or manu al
as s is tance.
Th e s ys t em s h ou l d , in ot h er word s , as s ign a conf id ence v al u e t o
t h e cl as s if ication t h at al l ows it t o cl as s if y eas y t ext s au t omat i cal l y
wh il e giv ing d if f icu l t cas es t o t h e ed itors . Brij Mas and h as s u cces s -
f u l l y ap p l ied GP t o t h e ev ol u tion of s u ch conf id ence v al u es f or au t o-
mat i cal l y cl as s if ied news s tories [Mas and , 1994].
Th e cod ing of a t ext cons is ts of as s igning one or more keyword s or
cod es t o t h e d ocu ment . Th ere are abou t 350 d if f erent cod es , s u ch as
in dustrial, Far East Japan , techn ology, computers, automobile man u-
facturers, electrical compon en ts & equipmen t. A s ingl e s t ory typ ical l y
wil l h av e a d ozen cod es as s igned t o it.
Th e au t omat i c MBR cl as s if ication s ys t em - wh ich in its el f h as
not h i ng t o d o wi t h genetic p rogrammi ng - is t rai ned on a d at abas e
of 87000 al read y cl as s if ied s tories . Perf ormance is meas u red by t h e
two concep t s recall and precision . Recal l is t h e p rop ort i on of cod es
t h at were as s igned bot h by t h e s ys t em and t h e ed itors . Precis ion is
t h e rat i o of correct cod es t o t ot al nu mber of as s igned cod es .
Th e au t omat i c s ys t em h as a recal l of abou t 82% and p recis ion
of abou t 71%. For each of t h e cod es as s igned t o a t ext t h e s ys t em
al s o p rod u ces a s core wh ich can be u s ed as a meas u re of cert ai nt y
f or t h e p art i cu l ar cod e. Th e objectiv e of t h e GP s ys t em is t o ev ol v e
a general meas u re giv en t h e s ort ed l is t of conf id ence s cores f rom t h e
as s igned cod es .
Th e f itnes s of t h e GP s ys t em is t h e p r od u ct of t h e recal l , p reci-
s ion, and t h e p rop ort i on of t ext s accep t ed f or au t omat i c cl as s if ication.
Th u s , t h e s ys t em s imp l y tries t o ach iev e h igh es t p os s ibl e qu al i t y in
j u d gment t oget h er wi t h au t omat i c j u d gment of as many t ext s as p os -
s ibl e.
Th e t ermi nal s et contains t h e s cores of t h e as s igned cod es and
f iv e nu meri cal cons t ant s (1 5). Th e f u nction s et contains t h e f ou r
ar i t h met i c op erat ors +, , x , / and t h e s qu are-root f u nction. Th e
ou t p u t of each ind iv id u al is normal ized , and al l ou t p u t abov e 0.8
12 Applications of Genetic Programming
is i nt erp ret ed as an accep t of t h e t ext , wh il e ou t p u t bel ow 0.8 is
i nt erp ret ed as give the text to man ual classification . Th e GP s ys t em
is t rai ned on 200 t ext s and v al id ated on anot h er 500 t ext s .
Res u l t s s h ow t h e conf id ence f ormu l as ev ol v ed by t h e GP s ys -
t em beat h and -cons t ru ct ed f ormu l as by abou t 14%, meas u red by t h e
nu mber of correctl y accep ted or trans f ered t ext s .
12.4.6 Image Classification wi t h the PADO System
Tel l er and Vel os o [Tel l er and Vel os o, 1996] u s e th eir PA DO s ys t em
f or cl as s if ication of images and s ou nd . Th e PA DO s ys t em is an ev o-
l u t i onary p rogram-i nd u ct i on s ys t em t h at u s es a grap h rep res ent at i on
of t h e ind iv id u al s . I t is a qu i t e comp l ex s ys t em wh ich is brief l y d e-
s cribed in S ection 12.12. C l as s if ying images and s ou nd s means d eal -
ing wi t h l arge d at a s ets and f u zzy rel ations h ip s . Th e s ys t em h as
many d if f erent ap p l i cat i on areas , s u ch as robot i c control .
PA DO h as been u s ed f or bot h image and s ou nd cl as s if ication,
bu t h ere we concent rat e on an image cl as s if ication exp eri ment . Th e
s ys t em is t rai ned on one object image each t i me. A f ter t rai ni ng, t h e
cl as s if ication p erf ormance is ev al u at ed on an u ns een image p ort rayi ng
t h e s ame object. Th i s u ns een image is t aken f rom a v al id ation s et
cont ai ni ng cl os e t o 100 images of t h e object. E xamp l es of t rai ni ng
and v al id ation image p airs are s h own in Fi gu re 12.12. O bj ect s in
t h e images incl u d e book, bot t l e, cap , gl as s es , h ammer , and s h oe.
Recognizing s u ch objects in an image is an eas y t as k f or t h e h u man
brai n, bu t t h e p robl em is of ext reme comp l exity, and it is v ery h ard
t o f ind a general ad ap t i v e al gori t h m t h at can s ol v e t h e t as k wi t h
a mi ni mu m of d omai n knowl ed ge. C ons equ entl y, v ery f ew generic
al gori t h ms f or t h i s kind of image p roces s ing exis t. Th e PA DO s ys t em,
h owev er, h as s h own remarkabl e s u cces s in t h e l imited d omai n it h as
been ap p l ied t o.
E ach p rogram in t h e p op u l at i on h as an ind exed memory of 256
integers t h at are 8-bit v al u es . Th e t er mi nal s et incl u d es f u nctions
and p roced u res of many d if f erent t yp es . Th ere are ar i t h met i c p rim-
itiv es (A DD, S UB, MUL, DI V, MOT, MAX, MIN) and cond i t i onal branch es
(I F-THE N-E LS E and E I THE R). Th e t ermi nal s et al s o incl u d es f u nctions
s p ecif ic t o t h e d omai n - PI XE L, LE A S T, MOST, AVERAGE, VA RIA NC E ,
DI FFE RE NC E - wh ich eith er giv e inf ormation on a s ingl e s p ecif ic p ixel
v al u e or p erf orm a s imp l e s t at i s t i cal f u nction on an image area. Th e
p ar amet er s f or t h e f u nctions res id e on t h e s ys t em s tack.
Th e p op u l at i on s ize is 2800 ind iv id u al s , and t h e s ys t em is ru n
ov er 80 generations f or each of t h e 98 t rai ni ng images . Th e res u l ts
s h ow t h at t h e cl as s if ication p r ogr am is correct between 70% and 90%
12.5 Engineering-Oriented Applications of GP Btf. ii
FTP
H i
A#
> 1 ^^
m
Figu re 12.12
77?e training and test im-
ages classified with PA DO
([Teller and Veloso, 1996],
copyright Oxford
University Press, Inc.,
reproduced with
permission)
of t h e t es t cas es , d ep end i ng on t h e d if f icu l ty of t h e res p ectiv e image.
S imil ar res u l ts are ach iev ed in a s ou nd cl as s if ication t as k.
12. 5 Engineer ing-Or ient ed Appl icat ions of GP
12. 5. 1 Onl ine Cont r ol of Real Robot
Genetic p r ogr ammi ng h as great p ot ent i al f or control ap p l i cat i ons .
Many control ap p l i cat i ons d emand s ol u tions t h at are h ard or imp os -
s ibl e t o d eriv e wi t h anal yt i cal met h od s . Nev erth el es s , nat u r e h as
p rov ed t o u s t h at t h ere exis t ingeniou s s ol u tions t o many ad v anced
control p robl ems .
C ons id er t h e miracl e of control l ing a h ou s e f l y (Musca domestica),
f or ins tance. Th e f l y s h ows s ignif icant p recis ion in its mov ement s ,
control l ing s ev eral wings in t h e context of t h e ext remel y non-l inear
d ynami cs of s mal l -s cal e aeronau t i cs . I n ad d ition, we know t h at t h e
h ard ware el ements control l ing t h e f l igh t - t h e neu rones - are f ewer
t h an one mil l ion, wi t h a cl ock f requ ency t h ou s and s of t i mes s l ower
t h an t h at of t h e p roces s ing el ements of a comp u t er. Th e control al go-
r i t h m is al s o ru n on a f au l t t ol erant mas s iv el y p aral l el tiny h ard ware
12 Applications of Genetic Programming
bas e wi t h ou t p robl ems . Th i s examp l e - one of many - is ind eed an
imp res s iv e ach iev ement of ev ol u tion. I f GP cou l d ev ol v e s ol u tions t o
p robl ems a f raction as comp l ex as ins ect f l ying, t h i s wou l d al read y
h av e enormou s p ot ent i al in t h e f iel d of control .
Problem Domain Robot control is an area t h at h as i nt eres t ed s ev eral GP res earch -
ers (s ee Tabl e 12.2). Howev er, mos t exp eri ment s h av e been p erf ormed
wi t h a s i mu l at i on of a robot in t h e comp u t er. A p robl em wi t h many
of t h es e ap p roach es is t h at it is d if f icu l t t o mov e t h e exp eri ment f rom
a s i mu l at ed robot t o a real one. Th e commones t way of d oing GP
f or a control p robl em is t o creat e a p op u l at i on of r and om p rograms .
E ach p rogram t h en control s t h e robot f or a p red ef ined nu mber of
t i me s t ep s . Th e robot is res et t o exactl y t h e s ame p oint bef ore ev -
ery p rogram ev al u ation. Th e ind iv id u al p rogram' s p erf ormance is
j u d ged accord ing t o t h e f itnes s f u nction as u s u al . Wh en al l p rograms
h av e been ev al u ated , t h e bes t p erf orming ones are rep rod u ced into
t h e next generat i on. S u bs equ entl y, t h e genetic op erat ors are ap p l ied .
Th es e s t ep s are rep eat ed u ntil a good s ol u tion is f ou nd . Let u s s ay
ap p roxi mat el y 100 generat i ons are need ed f or conv ergence. I f we h av e
a p op u l at i on s ize of 500 p rograms and each ind iv id u al is ev ol v ed d u r-
ing 100 t i me s tep s t h en we need 100 x 500 x 100 = 5 000 000 t i me
s t ep s of ev al u ation bef ore a good control l er is f ou nd . Th i s is i mp rac-
tical f or a real robot . Th e d ynami c res p ons e f rom t h e env i ronment
general l y requ ires at l eas t 300 ms f or meaningf u l f eed back - t h e re-
s u l t of t oo s h ort a control action wil l d rown in t h e d if f erent kind s
of mech anical , el ectronic, and al gorith mic nois e t h e robot p rod u ces .
Th i s means an ev ol u tion t i me of 1 500 000 s econd s , or two weeks . Th e
robot al s o need s t o be res et t o its initial p os ition bef ore each p r ogr am
ev al u ation, in t h i s cas e 50 000 t i mes . A comp u t er simulation , on t h e
ot h er h and , cou l d be ru n mu ch f as ter t h an a real -time s i mu l at i on,
and res et t i ng t h e p os ition wou l d not be a p robl em eith er.
I n t h i s s ection, we p res ent ou r own work on an onl ine v ers ion
of a GP control arch i t ect u re wh ich al l ows f or ef f icient u s e of GP t o
control a real r obot .
1
Th e exp eri ment s are p erf ormed wi t h a genetic
p rogrammi ng s ys t em ( A I MGP) ev ol v ing mach i ne cod e control p ro-
grams . Th i s s ys t em - d es cribed in S ection 9.2.4 - is wel l s u ited f or
l ow-l ev el control , s ince it giv es accep t abl e p erf ormance ev en on v ery
weak arch i t ect u res wh il e al s o al l owing f or a comp act rep res ent at i on
of t h e p op u l at i on.
Task Th e objectiv e of t h e control s ys t em is t o ev ol v e obs tacl e-av oid ing
beh av ior giv en d at a f rom eigh t inf rared p roximity s ens ors . Th e exp er-
1
For d etail s , s ee th e f ol l owing p ap ers : [Nord in and Banzh af , 1995c]
[O l mer et al ., 1996] [Banzh af et al ., 1997b] [Nord in and Banzh af , 1997b]
[Nord in and Banzh af , 1997c].
12.5 Engineering-Oriented Applications of GP Mcl.il
i ment s were p erf ormed wi t h a s t and ar d au t onomou s mi ni at u re robot ,
t h e S wis s mobil e robot p l atf orm Kh ep era [Mond ad a et al ., 1993],
s h own in Fi gu re 12.13. Th e mobil e robot h as a circu l ar s h ap e, a
d i amet er of 6 cm, and a h eigh t of 5 cm. I t p os s es s es two mot ors and
an on-board p ower s u p p l y. Th e mot ors can be i nd ep end ent l y con-
trol l ed by a PI D control l er. Th e robot h as a microcontrol l er onboard
wh ich ru ns bot h a s imp l e op erat i ng s ys t em and t h e GP-bas ed onl ine
l earning s ys t em.
Figu re 12.13
The Khepera robot
Th e f itnes s in t h e obs tacl e-av oid ing t as k h as a p ai n and a p l eas u re
p ar t . Th e negativ e cont ri bu t i on t o f itnes s - p ain - is s imp l y t h e s u m
of al l p roxi mi t y s ens or v al u es . Th e cl os er t h e robot ' s s ens ors are t o an
object, t h e h igh er t h e p ain. I n ord er t o keep t h e robot f rom s t and i ng
s til l or gyrat i ng, it h as a p os itiv e cont ri bu t i on t o f itnes s - p l eas u re -
as wel l . I t receiv es p l eas u re f rom going s t rai gh t and f as t. Bot h mot or
s p eed v al u es mi nu s t h e abs ol u t e v al u e of t h ei r d if f erence is t h u s ad d ed
t o t h e f itnes s .
Th e onl ine GP is bas ed on a p robabil is tic s amp l i ng of t h e env i-
ronment . Dif f erent s ol u tion cand i d at es (p rograms ) are ev al u at ed in
d if f erent s i t u at i ons . Th i s cou l d res u l t in u nf air comp ari s on becau s e a
good ind iv id u al d eal ing wi t h a h ard s i t u at i on can be rejected in f av or
of a bad ind iv id u al d eal ing wi t h a v ery eas y s i t u at i on. Th e concl u s ion
of t h es e exp eri ment s , h owev er, is t h at a good ov eral l ind iv id u al t end s
t o s u rv iv e and rep rod u ce in t h e l ong t erm. Th e s omewh at p arad oxi-
cal f act is t h at s p ars e t rai ni ng d at a s ets or p robabil is tic s amp l i ng in
ev ol u t i onary al gori t h ms of ten bot h increas e conv ergence s p eed and
keep d iv ers ity h igh enou gh t o es cap e l ocal op t i ma d u ri ng t h e s earch .
Th e remarkabl e f act t h at ev ol u tionary al gori t h ms mi gh t p ref er
nois y f itnes s f u nctions is al s o il l u s trated in [Fitzp atrick et al ., 1984].
Here, a genetic al gori t h m is u s ed t o mat ch two d igital p i ct u res , each
cons is ting of 10 000 p ixel s . Th e mos t ef f icient s amp l e s ize in t h e
f itnes s ev al u ation t u r ned ou t t o be 10 (ou t of 10 000) p ixel s . I n oth er
GP Elements
12.5 Engineering-Oriented Applications of GP
Th e robot s h ows exp l orat ory beh av ior f rom t h e begi nni ng on.
Th i s is a res u l t of t h e d iv ers ity in beh av ior res id ing in t h e f irs t gener-
at i on of p rograms wh ich h as been generat ed rand oml y. Nat u ral l y, t h e
beh av i or is errat i c at t h e ou t s et of a ru n. Du ri ng t h e f irs t mi nu t es ,
t h e robot keep s col l id ing wi t h d if f erent objects , bu t , as t i me goes on,
t h e col l is ions become l es s and l es s f requ ent. Th e f irs t intel l igent be-
h av ior u s u al l y emergi ng is s ome kind of backing u p af ter a col l is ion.
Th en, t h e robot grad u al l y l earns t o s teer away in an increas ingl y
s op h i s t i cat ed manner .
O n av erage, in 90% of t h e exp eri ment s , t h e robot l earns h ow t o
red u ce t h e col l is ion f requ ency t o l es s t h an 2 col l is ions p er mi nu t e. Th e
conv ergence t i me is abou t one h ou r. I t t akes abou t 40-60 mi nu t es , or
200-300 generat i on equ iv al ents , t o ev ol v e good obs tacl e-av oid ing be-
h av ior. Fi gu re 12.15 s h ows h ow t h e nu mber of col l is ions p er mi nu t e
d iminis h es as t h e robot l earns and as t h e p op u l at i on becomes d omi-
nat ed by good control s t rat egi es .
Results
50
40
30
-
20
10
"../Collisions"
-
.
1 -n
i - i
. - Hi
=c
"h r-Th .n miir- -rfl m . n
Figure 12.15
The number of collisions
per minute in a typical
training run with the
environment given in
Figure 12.14
30
Minutes
Th es e exp eri ment s ind icate t h e p ot ent i al of GP f or onl ine control
and h ow genetic p rogrammi ng combined wi t h a t ech ni qu e f or ev ol v -
ing mach i ne cod e can make t h e ev ol u tion of l ow-end arch i t ect u res
p os s ibl e.
12 Appl i cati ons of Genetic Programmi ng
12. 5. 2 Spacecraft At t i t u d e Maneuver s
Howl ey d es cribes a nice ap p l ication f rom t h e d omai n of op t i mal con-
trol [Howl ey, 1996]. Th e object t o be control l ed is a s p acecraf t. Th e
p robl em is t o f ind a control p rogram t h at p erf orms a 3D craf t re-
ori ent at i on in mi ni mal t i me. Th i s means t h at , giv en an initial craf t
at t i t u d e and a d es ired f inal at t i t u d e, t h e p rogram is requ ired t o r ot at e
t h e craf t into t h e f inal at t i t u d e in mi ni mal t i me by r ot at i ng t h e craf t
arou nd one or more of its t h ree bod y axes . Th es e axes are p airwis el y
ort h ogonal .
Problem Domain Th e craf t comp onent s af f ecting t h e rot at i on are cal l ed act u at ors .
For each bod y axis , t h ere is an act u at or , wh ich generates a p os itiv e
or a negativ e t orqu e t h at l ets t h e craf t r ot at e - d ep end i ng on t h e
d ef inition of positive and n egative - anticl ockwis e or cl ockwis e, s ay,
abou t t h e res p ectiv e axis . E ach act u at or is as s u med t o h av e a bang-
bang ch aract eri s t i c, s o t h at it generat es eith er a maximal p os itiv e or
maximal negativ e t orqu e.
Th i s p robl em is p ractical l y rel ev ant in t h e area of s atel l ite-bas ed
d at a t rans mi s s i on and obs erv ation, f or i ns t ance. Typ ical l y, an obs er-
v ation s atel l ite h as t o keep an op tical s ys t em in f ocu s on a p l anet ary
t arget area. I f t h e s atel l ite is mov ing rel ativ e t o t h e p l anet ar y s u r-
f ace, it h as t o reorient continu ou s l y - or, at l eas t, at s u f f icientl y s h ort
t i me interv al s - in ord er t o s tay f ocu s ed .
Task Th e ap p l i cat i on concent rat es on two maneu v er t yp es : res t-to-res t
and rat e-l i mi t ed non-zero (RLNZ) t ermi nal v el ocity. A res t-to-res t
maneu v er begins and end s wi t h zero angu l ar rat es - r at e is a s ynonym
f or v el ocity h ere - s o t h ere is no rot at i on abou t any axis bef ore or af ter
t h e maneu v er. O f ten, h owev er, a RLNZ maneu v er is need ed : bef ore
or af ter t h e maneu v er, t h e craf t is r ot at i ng abou t one or more axes
wi t h cert ai n angu l ar rat es . For i ns t ance, wh en t h e craf t is s u p p os ed
t o t rack a mov ing and maneu v eri ng t arget wi t h an op tical s ys tem,
RLNZ maneu v ers are need ed . Th e maxi mal angu l ar rat es are l imited
by t h e maxi mal f orces t h e act u at ors can generat e. I n p art i cu l ar, a
res t-to-res t maneu v er can be v iewed as a RLNZ maneu v er wi t h zero
initial and f inal rat e.
Not e t h at , accord ing t o a t h eorem of E u l er, a rigid bod y can get
f rom an ar bi t r ar y at t i t u d e into anot h er ar bi t r ar y at t i t u d e by a rot a-
tion t h r ou gh a cert ai n angl e abou t a cert ai n axis , cal l ed t h e eigen axis.
Th u s , i ns t ead of d oing a rot at i on s equ ence abou t one or more bod y
axes , t h e craf t may j u s t r ot at e t h r ou gh a cert ai n angl e abou t t h e
corres p ond i ng eigenaxis . Th i s rot at i on is i mp l ement ed by op erat i ng
one or more act u at or s in p aral l el .
I f you h av e t rou bl e imagining t h i s , t ake a r u bber eras er and a
need l e. Hol d t h e eras er in s ome initial at t i t u d e, t h en mov e it into
12.5 Engineering-Oriented Applications of GP
s ome f inal at t i t u d e by a s equ ence of bod y axis rot at i ons . For each
p ai r of initial and f inal at t i t u d e, you can al ways s tick t h e need l e
t h r ou gh t h e eras er s u ch t h at , wh en rot at i ng t h e need l e ap p rop ri at el y,
t h e eras er wil l mov e f rom t h e initial t o t h e f inal at t i t u d e: t h e need l e
rep res ent s t h e eigenaxis .
Th u s , a maneu v er means ch anging an initial ei genaxi s / rat e into
a f inal ei genaxi s / rat e. Th e control p robl em is t o d o t h i s as f as t as
p os s ibl e.
S ince an act u at or h as a bang-bang ch aract eri s t i c, t h e comp l et e Con trol Law
maneu v er cons is ts of a s equ ence of act u at or-s wi t ch i ng command s .
E ach command s witch es one or more act u at ors , each t o p os itiv e or
negat i v e t orqu e. For i ns t ance, s u ch a command may s witch act u at or s
one and two t o p os itiv e and t h ree t o negativ e. Th u s , a command
can be rep res ent ed by a 3D t orqu e v ector u\,U2,uz wi t h each u ;
d es i gnat i ng maxi mal p os itiv e or negativ e t orqu e. Th i s v ector is t h e
ou t p u t of a control l aw t h at t akes as i np u t t h e f inal ei genaxi s / rat e
and t h e cu rrent ei genaxi s / rat e.
Th u s , f or t h e control l aw i mp l ement at i on at t h e s t ar t of t h e ma-
neu v er, t h e initial ei genaxi s / rat e are t h e curren t p ar amet er s . Th e
control l aw becomes activ e f or t h e f irs t t i me, comp u t i ng a t orqu e
v ector. Th e corres p ond i ng act u at or activ ities l ead t o a new cu rrent
eigenaxis and r at e. Th e control l aw becomes activ e again, and s o on,
u nt i l t h e d es ired ei genaxi s / rat e are reach ed . Th en t h e control l oop
t er mi nat es .
Th e control p robl em f or res t-to-res t maneu v ers h as a known nu -
merical s ol u tion. Howev er, t h e comp u t at i on of t h i s s ol u tion takes
s ome t i me, wh ereas t h e p robl em mu s t be s ol v ed in real t i me: t h ere is
no s ens e in comp u t i ng an op t i mal s ol u tion t h at , wh en f inal l y f ou nd ,
can no l onger be u s ed s ince it is ou t of d at e. A n ap p roxi mat e bu t
real -time s ol u tion is requ ired . I t is real ized by t h e control l oop t h at
makes t h e craf t mov e incremental l y into t h e f inal ei genaxi s / rat e.
For t h e genetic p rogrammi ng s earch , an ind iv id u al is a control GP Elemen ts
l aw: GP ev ol v es exp res s ions t h at are u s ed as control l aw wi t h i n t h e
control l oop . Th e t ermi nal s et ref l ects t h e d es cribed i np u t and ou t p u t
p ar amet er s . Th e f u nction s et contains +, , x, a p rot ect ed d iv is ion
op erat or, s ign inv ers ion, t h e abs ol u te-v al u e f u nction, an if -a-l es s -6-
th en-action-el s e-action cons t ru ct , and t h ree A DF s ymbol s .
Th e f itnes s cas es cons is t of t h e initial ei genaxi s / rat e, t h e f inal
ei genaxi s / rat e, and a t i me-ou t l imit. Fi t nes s ev al u at i on cons id ers an
ind iv id u al as s u cces s f u l if its ap p l ication by t h e control l oop res u l ts
in t h e f inal ei genaxi s / rat e wi t h i n cert ai n error bou nd s and bef ore
t i me-ou t .
For res t-to-res t maneu v ers , ru ns went ov er 51 generations and Results
u s ed p op u l at i on s ize 5000. For RLNZ maneu v ers , t h e v al u es were
12 Applications of Genetic Programmi ng
74 and 10 000. A s genetic op erat ors , 80% nod e cros s ov er, 10% l eaf
cros s ov er, and 10% cop ying were emp l oyed . A s f or h ard ware and
s of tware, A nd re' s DGPC was u s ed on an I BM RS 6000.
Genetic p rogrammi ng p rod u ced a res u l t f or t h e res t-to-res t ma-
neu v er wi t h i n p l u s or minu s 2% of t h e nu meri cal s ol u tion. A d d i t i on-
al l y, t h i s s ol u tion general ized t o s ol v e f u rth er rand oml y generat ed
maneu v ers . A s f or t h e RLNZ maneu v er, GP p rod u ced a s ol u tion
t h at s ol v ed al l f itnes s cas es bu t d id not general ize.
12. 5. 3 Hexapodal Robot
S p encer rep ort s on an ap p l ication of genetic p rogrammi ng t o robotics
[S p encer, 1994]. A s i mu l at ed h exap od al (s ix-l egged ) robot is t o be
control l ed by an ev ol v ed p r ogr am s u ch t h at t h e robot wal ks as f ar as
p os s ibl e in an env i ronment bef ore a t i me-ou t . E ach l eg of t h e robot
can be l if ted u p t o a f inal p os ition or p u t d own u nt i l t h e f oot tou ch es
t h e grou nd . E ach l eg can al s o be mov ed f orward and backward -
p aral l el t o t h e grou nd - wi t h v arying f orce. Th u s , if t h e l eg is d own
and mov es , t h i s act i on res u l ts in a r obot - bod y mov ement . Th e robot
is u ns t abl e if its center of grav ity is ou ts id e t h e p ol ygon d ef ined by
t h e f eet t h at are on t h e grou nd . A f ter a cert ai n t i me, an u ns t abl e
robot f al l s .
Task A s u bgoal of t h i s ap p l i cat i on is h av ing t h e robot l earn t o wal k
wi t h mi ni mal a priori knowl ed ge abou t t h i s f u nction. Th u s , t h ree
exp eri ment al s et u p s are p res ented , each p rov id ing t h e robot wi t h l es s
knowl ed ge.
GP Elemen ts Th e genot yp e is a tree exp res s ion. Th e t er mi nal s et cont ai ns ran-
d om f l oating-p oint cons t ant s , and - d ep end i ng on t h e exp eri ment al
s et u p - O s c i l l a t o r and Get - Leg- For ce- n. O s c i l l a t o r rep res ents
10s in(^), t being t h e nu mber of el ap s ed t i me u ni t s s ince t h e s t ar t of
an exp eri ment . Ge t - Le g- For c e - n r et u r ns t h e f orce l eg n mov es with .
Th e f u nction s et cons is ts of u nary negat i on , +, , X, p rot ect ed
d iv is ion, min and max f u nctions , and t h e f mod f u nction (f l oating-p oint
mod u l o). A t ernary i f f u nction ans wers its s econd argu ment if t h e
f irs t argu ment is p os itiv e, and its t h i rd argu ment if t h e f irs t argu ment
is non-p os itiv e.
For l eg control , t h ere are two f u nctions . Unar y S e t - Le g- For c e - n
s ets a cert ai n f orce f or l eg n . Th e l eg wil l be mov ed wi t h t h i s f orce.
Unary S e t - Le g - S t a t e - n l if ts l eg n u p or p u t s it d own d ep end ent on
t h e ar gu ment ' s s ign.
Th e f itnes s of an ind iv id u al corres p ond s t o t h e d i s t ance - between
t h e s t ar t and end p oints of t h e wal ked p at h - t h e robot wal ks u nd er
s f '.v r.? t h e i nd i v i d u al ' s control u ntil a t i me-ou t . Di s t ance is meas u red in
s p ace u ni t s . Th e t i me-ou t occu rs 500 t i me u ni t s af ter t h e s imu l ation
12.5 Engineering-Oriented Applications of GP
h as s t ar t ed . A f ter each el ap s ed t i me u ni t , an ind iv id u al gets ev al u -
at ed . Th e ev al u ation - t h e execu tion - may cau s e l eg actions . A s
a cons equ ence, t h e ind iv id u al may f al l . I n t h i s cas e, t h e s imu l ation
s t op s at once.
A p op u l at i on s ize of 1000 ind iv id u al s is u s ed , wi t h 50, 65, or
100 generat i ons , d ep end i ng on t h e exp eri ment al s et u p . Th e s el ection
s ch eme is a 6-t ou rnament , and 0.5% mu t at i on and 75% cros s ov er are
emp l oyed as genetic op erat ors .
S p encer i nt rod u ces cons t ant p er t u r bat i on, wh ich gets u s ed wi t h
25% p robabil ity. Th i s op erat or, ap p l ied t o an ind iv id u al , ch anges
each cons t ant in t h e exp res s ion by p l u s or minu s 10%. S p encer argu es
t h at t h i s kind of mu t at i on is more benef icial t h an s t and ar d mu t at i on
s ince it is j u s t t h e coef f icients t h at get ch anged , not t h e s t ru ct u re,
wh ich mi gh t d i s ru p t t h e p rogram l ogic.
Th e l eg-rel ated t ermi nal s and f u nctions may giv e ris e t o inter-
es ting s id e ef f ects . For i ns t ance, cert ai n l egs can be control l ed im-
med i at el y by t h e s t at e of ot h er l egs . For examp l e, t h e s t at ement
S e t - Le g - F o r c e - l ( Ge t - Le g - F o r c e - 2 ( . . ) ) makes l eg 1 mov e wi t h
t h e f orce of l eg 2. Th i s kind of inter-l eg commu ni cat i on is act u al l y
a s of tware anal og of a s imil ar concep t i mp l ement ed in t h e neu ral
l eg-motion control s ys t em of cert ai n ins ects .
S p encer rep ort s t h at , in al l t h ree exp eri ment s , ind iv id u al s emerge Results
t h at can control t h e robot s u ch t h at it p erf orms "ef f icient, s u s t ai ned
l ocomotion, " and bel iev es t h at t h e ap p l ication can be s cal ed u p t o
t h ree-d i mens i onal robot s .
Th i s ap p l i cat i on rais es a v ery interes ting p os s ibil ity: real -t i me
GP control of robot i c s ys t ems . O bv iou s l y, ev ol v ing a p rogram f or a
real -time ap p l ication is u s u al l y inf eas ibl e durin g ru n t i me, s ince t h e
ev ol u tion takes t oo l ong. S o, t h e naiv e ap p roach is t o ev ol v e a v ery
good s ol u tion of f l ine and t o trans f er t h i s p rogram t o t h e control u ni t
of a robot wh ere it p erf orms in real t i me. Howev er, a big d is ad v an-
t age wi t h t h i s ap p roach is t h at , no mat t er h ow good t h e s ol u tion
is , once it h as been ev ol v ed and trans f erred , it cannot ev ol v e f u r-
t h er t o ad ap t t o a p ot ent i al l y ch anging env i ronment . S p encer brief l y
cons id ers combining genetic p rogrammi ng with cl as s if ier s ys t ems t o
ov ercome t h i s d i s ad v ant age.
12.5.4 Design of Electrical Circuits
Th e mos t obv iou s ap p l ication area f or GP is ev ol v ing p rograms . How-
ev er, v ari ant s of t h e tech niqu e can be u s ed t o ev ol v e s t ru ct u res rep -
res enting objects t h at are not i mmed i at el y id entif ied as conv entional
p rograms . O ne s u ch ap p l ication is t h e au t omat i c d es ign of el ectrical
circu its .
12 Applications of Genetic Programmi ng
74 and 10 000. A s genetic op erat ors , 80% nod e cros s ov er, 10% l eaf
cros s ov er, and 10% cop ying were emp l oyed . A s f or h ard ware and
s of tware, A nd re' s DGPC was u s ed on an I BM RS 6000.
Genetic p rogrammi ng p rod u ced a res u l t f or t h e res t-to-res t ma-
neu v er wi t h i n p l u s or minu s 2% of t h e nu merical s ol u tion. A d d i t i on-
al l y, t h i s s ol u tion general ized t o s ol v e f u rth er rand oml y generat ed
maneu v ers . A s f or t h e RLNZ maneu v er, GP p rod u ced a s ol u tion
t h at s ol v ed al l f itnes s cas es bu t d id not general ize.
12.5.3 Hexapodal Robot
S p encer rep ort s on an ap p l i cat i on of genetic p r ogr ammi ng t o robotics
[S p encer, 1994]. A s i mu l at ed h exap od al (s ix-l egged ) robot is t o be
control l ed by an ev ol v ed p r ogr am s u ch t h at t h e robot wal ks as f ar as
p os s ibl e in an env i ronment bef ore a t i me-ou t . E ach l eg of t h e robot
can be l if ted u p t o a f inal p os ition or p u t d own u nt i l t h e f oot tou ch es
t h e grou nd . E ach l eg can al s o be mov ed f orward and backward -
p aral l el t o t h e grou nd - wi t h v arying f orce. Th u s , if t h e l eg is d own
and mov es , t h i s action res u l ts in a r obot - bod y mov ement . Th e robot
is u ns t abl e if its center of grav i t y is ou t s i d e t h e p ol ygon d ef ined by
t h e f eet t h at are on t h e grou nd . A f ter a cert ai n t i me, an u ns t abl e
robot f al l s .
Task A s u bgoal of t h i s ap p l ication is h av ing t h e robot l earn t o wal k
wi t h mi ni mal a priori knowl ed ge abou t t h i s f u nction. Th u s , t h ree
exp eri ment al s et u p s are p res ented , each p rov id ing t h e robot wi t h l es s
knowl ed ge.
GP Elemen ts Th e genot yp e is a tree exp res s ion. Th e t ermi nal s et cont ai ns ran-
d om f l oating-p oint cons t ant s , and - d ep end i ng on t h e exp eri ment al
s et u p - O s c i l l a t o r and Get - Leg- For ce- n. O s c i l l a t o r rep res ent s
10s i n(i ), t being t h e nu mber of el ap s ed t i me u ni t s s ince t h e s t ar t of
an exp eri ment . Ge t - Le g- For c e - n r et u r ns t h e f orce l eg n mov es wi t h .
Th e f u nction s et cons is ts of u nary negat i on , +, , x, p rot ect ed
d iv is ion, min and max f u nctions , and t h e f mod f u nction (f l oating-p oint
mod u l o). A t ernary i f f u nction ans wers its s econd argu ment if t h e
f irs t argu ment is p os itiv e, and its t h i rd argu ment if t h e f irs t argu ment
is non-p os itiv e.
For l eg control , t h ere are two f u nctions . Unary S e t - Le g - Fo r c e - n
s ets a cert ai n f orce f or l eg n . Th e l eg wil l be mov ed wi t h t h i s f orce.
Unar y S e t - Le g - S t a t e - n l if ts l eg n u p or p u t s it d own d ep end ent on
t h e ar gu ment ' s s ign.
Th e f itnes s of an ind iv id u al corres p ond s t o t h e d i s t ance - bet ween
t h e s t ar t and end p oints of t h e wal ked p at h - t h e robot wal ks u nd er
?" t h e i nd i v i d u al ' s control u nt i l a t i me-ou t . Di s t ance is meas u red in
s p ace u ni t s . Th e t i me-ou t occu rs 500 t i me u ni t s af ter t h e s i mu l at i on
12 Applications of Genetic Programming
Koza et al . h av e u s ed genetic p rogrammi ng s u cces s f u l l y t o ev ol v e
a l arge nu mber of d if f erent circu its wi t h good res u l ts
[Koza et al ., 1996b] [Koza et al ., 1996c]. Here, a recip e f or h ow t o
cons t ru ct a circu it is ev ol v ed by t h e GP s ys t em. E ach ind iv id u al
cont ai ns nod es wi t h op erat i ons t h at mani p u l at e an el ectrical circu it.
A t t h e beginning of an ind iv id u al ev al u at i on a - p red ef ined em-
bryonic circu it is creat ed . Th i s s mal l bu t cons is tent circu it is t h en
ch anged by t h e op erat ors in t h e GP ind iv id u al , and t h e res u l ting
circu it is ev al u at ed f or its p erf ormance by a s i mu l at or f or el ectrical
circu its u s ing t h e original t as k. Th e s i mu l at or is of ten v ery com-
p l ex and t h e f itnes s f u nction t h u s t akes a v ery l ong t i me t o comp u t e.
Nev erth el es s , it is p os s ibl e t o ev ol v e wel l -p erf orming el ectrical circu it
d es igns f as ter and bet t er t h an a h u man cou l d d es ign t h em manu al l y.
Th e t ech ni qu e is an examp l e of a met h od wh ere t h e p h enot yp e -
t h e circu it - d if f ers f rom t h e genot yp e - t h e GP ind iv id u al - and is
p art l y bas ed on t h e work of Gr u au d es cribed in S ection 12.4.1.
Th e circu its t h at h av e been s u cces s f u l l y s ynth es ized incl u d e bot h
p as s iv e comp onent s (wires , res is tors , cap aci t ors , etc.) and activ e
comp onent s (t rans i s t ors ). Fi gu res 12.16 and 12.17 s h ow examp l es
of ev ol v ed circu its .
Figure 12. 16
An evolved circuit
([Koza et al., 1996b],
copyright MIT Press,
reproduced with
permission)
x
\ - c^>*
^S B S O U R C E
1 -
--
O -
i qsou r e cE
p C3l sl D
*"'
r -
dl>
A
Z O U T ^
V D U T
H L O A Q ;
1-
5
=-
Th e f u nction s et contains f u nctions of t h ree bas ic t yp es :
C onnection-mod if ying f u nctions
C omp onent -creat i ng f u nctions .;
A u t omat i cal l y d ef ined f u nctions
<*.. .,* J
A t each moment , t h ere are s ev eral writin g heads in t h e circu it.
Th e wri t i ng h ead s p oi nt t o comp onent s and wires in t h e circu it t h at
wil l be ch anged by t h e next f u nction t o be ev al u at ed in t h e p r ogr am
12.5 Engineering-Oriented Appl i cati ons of GP
E3
Figu re 12.17
An evolved circuit
([Koza et al., 1996b],
copyright MIT Press,
reproduced with
permission)
A ztf
tree. A writing h ead mov es and /or s p awns new writing h ead s af ter
each op eration.
C onnection-mod if ying f u nctions can f l ip a comp onent u p s id e d own
or d u p l icate a comp onent in s eries or in p aral l el with it. C omp onent-
creating f u nctions ins ert a new comp onent into th e circu it at th e
l ocation of a writing h ead .
Th e p rogram tree is typ ed (s ee S ection 10.2.10), and cros s ov er
exch anges onl y s u btrees of th e s ame typ e. I nitial ization is gu aranteed
to create trees obeying s yntactic cons traints , th at is , a tree h as a
correct nu mber of s u btrees . Th ere is al s o a mu tation op erator th at
comp l ies with th e s yntactic ru l es of th e circu it.
Th e S PI C E p ackage f rom th e Univ ers ity of C al if ornia at Berkel ey
is u s ed to s imu l ate el ectronic circu its f or f itnes s ev al u ation. S imu l at-
ing el ectronic circu its is v ery time cons u ming, th u s th e s ys tem is ru n
on a 64-p roces s or (PowerPC ) p aral l el mach ine with a p aral l el GP
imp l ementation u s ing d emes (s ee S ection 10.1.2).
Th e res u l ts s h ow th at, u s ing a p op u l ation s ize of 640 000 ov er
abou t 200 generations , it is p os s ibl e to s ol v e p robl ems th at are re-
gard ed as d if f icu l t f or a h u man d es igner.
12. 5. 5 Ar t icul at ed Figure Mot i on Ani mat i on
C omp u ter-as s is ted ch aracter animation became a mu l timil l ion-d ol l ar Problem Domain
bu s ines s in th e 1990s . With th e ad v ent of p owerf u l grap h ic works ta-
tions and p aral l el -p roces s or f arms f or s imu l ating l igh ting cond itions
and oth er as p ects of animated s cenes , th e au tomated generation of
articu l ated f igu re motion is a growing need .
Prof es s ional animators h av e u ntil recentl y been abl e to keep u p
with th e d emand f or f rames , bu t th e manu al generation of f rames is
becoming more and more ou td ated . Gritz and Hah n h av e p rop os ed
u s ing GP f or animating f igu res [Gritz and Hah n, 1995]. Th ey obs erv e
12 Applications of Genetic Programmi ng
t h at , al t h ou gh it is d if f icu l t f or h u mans t o generat e ch aract er motion,
it is eas y f or h u mans t o j u d ge generat ed mot i on f or its qu al ity. Th ei r
s u gges tion is t o l et a GP s ys t em generat e mot i on and t o h av e t h e
h u man p rov id e t h e j u d gment as t o wh et h er it is good or bad .
Th e agents t o be ani mat ed are control l ed by p rograms wh ich wil l
be s u bject t o ev ol u tion v ia GP. Th e h op e is t h at GP is abl e t o f ind
good control l er p rograms , s t art i ng f rom a p op u l at i on of rand oml y
generat ed mot i on control p rograms .
Task Th e t as k Gri t z and Hah n cons id er is t o generat e control p rograms
f or artif icial agents cons is ting of a f igu re mod el wi t h f ixed geomet ry
and d ynami cal f eatu res . A f igu re is t r eat ed as a tree of rigid l inks
wi t h d amp ed angu l ar s p rings , and a s imu l ation of its d ynami cs is
p erf ormed u s ing es tabl is h ed met h od s [A rms trong and Green, 1985]
[Hah n, 1988] [Wil h el ms , 1990].
Fi gu re 12.18 s h ows one of t h e j oi nt s wi t h t h e corres p ond i ng qu an-
tities t o be u s ed f or t h e d ynami cs s imu l ation. Th e j oi nt h as a d es ired
ori ent at i on t h at can be ach iev ed by i nt egrat i ng, wi t h a p rop ort i onal -
d eriv ativ e (PD) control l er, t h e f orces of t h e s p ring.
Figure 12. 18
The torque at the joint is
proportional to the
angular difference
between actual and
desired orientation of the
links. The desired angle
is the output of the
controller program
([Gritz and Hahn, 1995]).
System Structure
GP Elements
Rigid Link i
Rigid Linki+1
(actual pos.)
O--- Desired pos. link i+1
Th e GP s ys t em ev ol v es control l er p rograms t h at ou t p u t d es ired
ori ent at i ons f or al l t h e j oi nt s wh ich are t h en u s ed by t h e d ynami cs
mod el t o generat e mot i on by i nt egrat i ng t h e d ynami cs equ at i ons f or
a nu mber of t i me s t ep s . Th e d ynami cs s i mu l at i on al s o p erf orms col -
l is ion d et ect i on and col l is ion res p ons e, yiel d ing a p h ys ical l y real is tic
mot i on of t h e f igu re.
Th e entire s ys t em cons is ting of a GP mod u l e commu ni cat i ng wi t h
t h e d ynami cs mod u l e is d ep icted in Fi gu re 12.19.
Th e f igu re mod el of t h e p art i cu l ar ch aract er t o be ani mat ed is
cons id ered t h e i np u t , as is t h e f itnes s f u nction s p ecif ying wh at kind
of mot i on is good or bad . Th e control p rograms giv ing command s as
t o h ow t o mov e t h e f igu re are t h e ou t p u t of t h e s ys t em.
Th e mi ni mal s et of f u nctions Gri t z and Hah n cons id er are t h e
bas ic ar i t h met i c f u nctions +, , *, % and a f u nction i f l t z , wh ich
need s t h ree argu ment s . More el aborat e f u nctions , s u ch as cos or abs ,
or wh i l e- cont r ol f u nctions or s p ecial f u nctions l ike r e l e a s e g r i p or
d i s t a n c e t o n e a r e s t n e i g h b o r , are ment i oned bu t not u s ed .
12.5 Engineering-Oriented Appl i cati ons of GP
Controller Program
i
GP System
Fitness Metric
..- \,--n.
Articulated figure
dynamics simulation
Figure Model
O u tp u t
S ys tem
(Bl ack box)
I np u t
(Us er s u p p l ied )
Figure 12. 19
A system for rigid body
animation
([Gritz and Hahn, 1995])
i'K h()OV -::i:
Th e terminal s cons is t of th e internal s tate v ariabl es of th e f igu re
and ou tp u ts of s ens ors acces s ibl e to th e f igu re. Th es e qu antities are
read ou t at th e time of ev al u ation of th e control p rogram and u s ed
as its inp u t. Gritz and Hah n al s o u s e rand om ep h emeral cons tants
as terminal s f or th eir s imu l ations .
Becau s e th ere is u s u al l y more th an one joint in a f igu re, th e con-
trol p rograms f or each of th e joints are ev ol v ed s imu l taneou s l y bu t
s ep aratel y.
Th e f itnes s meas u re cons is ts of two terms one ev al u ates th e main
goal of th e mov ement, and th e oth er one ju d ges th e s tyl e of mov ement.
I n one examp l e u s ed by Gritz and Hah n, th e main goal is to mov e a
l amp - as th e animated f igu re - to a certain p l ace. Parameters u s ed
were: P = 250, G
max
= 50, p
c
= 0.9.
Th e l amp f igu re h as f ou r l inks and th ree internal l y control l abl e
3D d egrees of f reed om. Th e res u l ting l amp motions (s ee.Figu re 12.20)
cons is ted of ju mp s and l ooked s mooth , p h ys ical l y real is tic, ef f icient
and s u rp ris ingl y organic [Gritz and Hah n, 1995]. Gritz and Hah n
al s o u s e a h u manoid f igu re with a total of 28 d egrees of f reed om,
between 4 and 10 of wh ich are control l ed by th e GP s ys tem.
A s to th e s tyl e of th e motion, Gritz and Hah n p l ayed a nice trick
ap p l icabl e anywh ere. I nitial l y, th e f itnes s f u nction cons is ted of th e
d is tance to th e goal onl y. Th e mov ement-s tyl e terms were grad u al l y
p h as ed in af ter s ome generations . "I n th is manner, we al l owed th e
motion to s tart cru d el y and get, p rogres s iv el y more s tabl e ov er s ev eral
generations . Th is was eas ier f or th e s ys tem th an requ iring op timal
motion at th e v ery s tart" [Gritz and Hah n, 1995].
Figu re 12.20
The lamp's jumping
motion: the main goal is
to move the lamp to the
target point X
([Gritz and Hahn, 1995],
copyright John Wiley,
reproduced with
permission)
12 Appl i cati ons of Genetic Programmi ng
S tyl e was ju d ged by a weigh ted s u m of th e f ol l owing:
bonu s f or comp l eting th e motion earl y
p enal ty f or exces s mov ement af ter th e goal was met
p enal ty f or h itting its h ead or f al l ing ov er
bonu s f or end ing with joints at neu tral angl es
Th e comp u tation time p er generation was a few minu tes on a
MI PS R4000 p roces s or. Th is p erf ormance ap p ears good wh en com-
p ared to th at of a h u man animator d rawing a s equ ence of f rames by
h and .
12.6 Summary
I n th is ch ap ter, we h av e s een an amazing v ariety of ap p l ications .
Genetic p rogramming h as s h own its worth in a broad s p ectru m of
real -l if e p robl em d omains with remarkabl e f l exibil ity as a mach ine
l earning tech niqu e. GP is al s o u niqu e in its combination of s ymbol ic
and s u bs ymbol ic ap p l ication areas . I n contras t to neu ral networks ,
f or ins tance, it is p os s ibl e - bu t not al ways eas y - to in terpret th e
GP ou tp u t ind iv id u al and th u s to generate p otential l y new ins igh ts
into th e s ol v ed p robl em. I n th is way, we h av e s een or mentioned
h ow GP can be ap p l ied to h igh l y s ymbol ic tas ks s u ch as natu ral
l angu age p roces s ing and ev en th eorem p rov ing. A t th e oth er end of
th e s p ectru m, it can be u s ed f or l ow-l ev el s ignal p roces s ing.
Genetic p rogramming h as s h own its v al u e in h ybrid tech niqu es
togeth er with oth er mach ine l earning p arad igms s u ch as neu ral net-
works . I n oth er exp eriments , it comp ared wel l to oth er s u ch mach ine
l earning p arad igms in terms both of s p eed and l earning cap abil ity.
GP tech niqu es h av e been u s ed to ev ol v e binary mach ine cod e, wh ich
giv es v ery ef f icient ev ol v ed p rograms .
S ome GP ap p l ications l earn with onl y a few f itnes s cas es wh il e
oth ers work in d omains with h u ge d ata s ets s u ch as image p roces s ing.
I n oth er examp l es , f or ins tance, in Koza's circu it d es ign ap p roach , GP
h as been s h own to match h u man exp ert p erf ormance both in time
exp end itu re and in s ol u tion qu al ity.
S ome of th is f l exibil ity may be attribu ted to th e f reed om in ch oos -
ing an arbitrary f u nction s et. By ch anging th e f u nction s et, it is p os -
s ibl e to ad ap t GP toward any p robl em d omain wh ere a s u itabl e f it-
nes s f u nction can be d ef ined . A noth er reas on f or th e broad s p ectru m
of GP ap p l ication d omains is th e general l y v ery robu s t ev ol u tionary
s earch . E v ol u tionary s earch is not al ways th e mos t ef f icient s earch in
12.6 Summary
s p ecial ized p robl em d omains bu t it is known to be v ery robu s t in its
ap p l icabil ity - at wors t d egrad ing to a h il l cl imbing al gorith m.
Th e ach iev ements in GP res earch ov er onl y fiv e years or s o are
tru l y encou raging f or th e f u tu re.
13 Summary and
Perspectives
C ontents
13. 1 Summary 380
13.2 The Future of Genetic Programming 381
13.3 Conclusion 383
13 Summary and Perspectives
Th e engineering p roces s d oes n't work v ery wel l wh en it gets com-
p l icated . We are beginning to d ep end on comp u ters th at u s e a
p roces s v ery d if f erent f rom engineering - a p roces s th at al l ows u s
to p rod u ce th ings of mu ch more comp l exity th an we cou l d with
normal engineering. Yet we d on' t qu ite u nd ers tand th e p os s ibil i-
ties of th at p roces s , s o in a s ens e it' s getting ah ead of u s . We are
now u s ing th os e p rograms to make mu ch f as ter comp u ters s o th at
we wil l be abl e to ru n th is p roces s mu ch f as ter. Th e p roces s is
f eed ing on its el f . I t' s becoming f as ter. I t' s au tocatal ytic. We are
anal ogou s to th e s ingl e-cel l ed organis ms wh en th ey were tu rning
into mu l ticel l u l ar organis ms . We are th e amoebas , and we can' t
qu ite f igu re ou t wh at th e h el l th is th ing is we are creating. We are
righ t at th at p oint of trans ition, and th ere is s ometh ing coming
al ong af ter u s .
: D. Hl LLI S , 1991
13.1 Summary
I n t h i s book we h av e s et ou t t o i nt rod u ce t h e read er t o genetic p ro-
grammi ng, an exciting new f iel d in comp u t er s cience. GP is p ar t of
t h e mach i ne l earning branch of artif icial intel l igence. Th eref ore, it
s eemed t o u s ap p rop ri at e t o s t ar t t h i s book wi t h a l ook at mach i ne
l earning in C h ap t er 1. O u r mai n p oi nt h ere was t h at GP is abl e t o
ev ol v e comp u t er p rograms and , as s u ch , GP' s p robl em rep res ent at i on
is a s u p ers et of t h e rep res ent at i ons of al l ot h er ML met h od s , al l of
wh ich work on comp u t ers , t oo.
GP h as al s o d rawn h eav il y on id eas f rom biol ogy. I n p art i cu l ar, it
is an ML p arad i gm bu il t on t h e t h eory of ev ol u tion. C h ap t er 2 t h u s
p res ented s ome biol ogical backgrou nd , and we l ooked at h ow nat u r al
ev ol u tion p roceed s in t h e l iv ing worl d . Th r ou gh ou t t h i s book, we
h av e at t emp t ed t o r et u r n t o t h e biol ogical met ap h or in exp l aining
GP or in p os ing p os s ibl e ans wers t o u nres ol v ed qu es tions . I n t h e
j u d gment of t h e au t h ors , mu ch more is t o be l earned by s t u d yi ng
t h i s anal ogy f u rth er and into more d ep t h .
GP can be s aid t o be t h e "of f s p ring" res u l t i ng f rom a cros s ov er
of biol ogy wi t h comp u t er s cience. A ccord ingl y, C h ap t er 3 p res ent ed
s ome mat h emat i cs and comp u t er s cience backgrou nd . I n p art i cu l ar,
we l ooked at t h e qu es tion of generat i ng rand omnes s , and rand omnes s
wi t h d if f erent f eatu res f or al gori t h ms , and into t h e comp u t er s cience
met h od s av ail abl e f or GP.
Th ere are ot h er of f s p ring f rom s u ch a cros s ov er of biol ogy wi t h
comp u t er s cience, not abl y E P, GA , and E S , wh ich were d is cu s s ed
in more d et ai l in C h ap t er 4. Th e mai n d if f erences between GP and
th es e ot h er al gori t h ms were ment i oned .
13.2 The Future of Genetic Programming
Th e ch ap t ers t reat i ng GP d irectl y s t art ed wi t h an i nt rod u ct i on
t o t h e bas ics in C h ap t er 5. E l ement ary rep res ent at i ons f or breed ing
p rograms were p res ented al ong wi t h t h e commones t genetic op erat ors
and s el ection s ch emes t h at work on th es e rep res ent at i ons .
O ne of t h e mos t h eav il y u s ed genetic op erat ors in GP, cros s ov er,
was t h e s u bj ect of C h ap t er 6. O u r p oint of v iew was t h at cros s ov er,
in its s imp l es t embod i ment , h as s ome f l aws t h at need i mp rov ement .
We argu ed t h at a h omol ogou s cros s ov er op erat or or ot h er means t o
d ecreas e t h e r at e of d es t ru ct i v e cros s ov er wou l d be i mp or t ant s t ep s
in t h at d irection.
I n l ooking at t h e r u n d ynami cs of GP, we l earned in C h ap t er 7
h ow i nt rons can s p oil GP ru ns and wh y t h ey emerge in t h e f irs t p l ace.
Th e mixed bl es s ing of t h i s emergent p h enomenon was t h e mai n t h eme
in t h e ch ap t er. We tried t o make cl ear t h at u nd ers t and i ng emergent
ef f ects h el p s in u nd ers t and i ng ev ol u tion.
Val id ation of res u l ts and u nd ers t and i ng comp l ex ru n d ynami cs
are es s ential t o ad v ancing t h e d is cip l ine. A ccord ingl y, C h ap t er 8
d es cribes t h e tool kit av ail abl e t o p ract i t i oners t o meas u re i mp or t ant
obs erv abl es d u ri ng GP ru ns and t o v al i d at e GP res u l t s .
A f ter t h es e general cons id erations , C h ap t er 9 p res ent ed a s et of
GP v ari ant s . Rou gh l y, t h ey can be cl as s if ied by t h ei r genotyp ic s t ru c-
t u r e into t h ree grou p s : s equ ence, tree, and grap h s t ru ct u res .
C h ap t er 10 was d ev oted t o d is cu s s ing a l arge v ariety of ad v anced
met h od s f or GP wh ich were organized arou nd h ow t h ey imp rov ed
t h e f eatu res of GP: s p eed , p ower of ev ol u tion, and t h e p ower of t h e
ev ol v ed p rograms .
C h ap t er 11 t h en d eal t wi t h i mp l ement at i on is s u es - t h e tech -
niqu es neces s ary t o make GP work on t h e comp u t ers av ail abl e tod ay.
We d is cu s s ed s ys t ems bas ed on l is t p roces s ing, on arrays and s tacks ,
and on mach i ne cod e.
C h ap t er 12, f inal l y, d is cu s s ed a l arge v ariety of s u bjectiv el y s e-
l ected ap p l i cat i on p robl ems t h at h av e been tackl ed u s ing GP.
13.2 The Future of Genetic Programmi ng
Bu t th e onl y way of d is cov ering th e l imits of th e p os s ibl e is to
v entu re a l ittl e way p as t th em into th e imp os s ibl e.
A . C . C LA RKE
S ome of t h e id eas p res ented in t h i s s ection wil l s eem t o be j u s t arou nd
t h e corner, wh il e ot h ers may ap p ear f ar-f etch ed . Howev er, we s h ou l d
not f orget t h at d ynami c s ys tems - and GP is p ar t of s u ch a s ys t em,
s cience and tech nol ogy s omet i mes s h ow non-l inear beh av ior wh ich
may res u l t in accel erated d ev el op ment d u ri ng critical p h as es .
13 Summary and Perspectives
Let u s remi nd ou rs el v es of t h e u l t i mat e goal . We want t o be
abl e t o tel l comp u t ers what we want t h em t o d o - and comp u t ers
s h ou l d l earn how t o d o it au t omat i cal l y. C omp u t er s s h ou l d be abl e
t o p r ogr am th ems el v es , and GP is one ap p roach t h at mi gh t t ake u s
toward t h at goal .
Howev er, if we can tel l a comp u t er wh at t o d o, wh y s h ou l d not
a comp u t er tel l anot h er comp u t er wh at t o d o? C ons id er t h e increas -
ing connectiv ity of comp u t ers worl d wid e. I t is intrigu ing t o t h i nk
abou t comp u t ers d el egating s u bt as ks of a comp l ex ov eral l t as k t o
t h ei r p eers . I n Ju l y 1996 t h ere were cl os e t o 13 mil l ion h os t s in t h e
I nt ernet . A cert ai n p ercent age may of ten be d own, s l ow, or bu s y, bu t
t h i s s til l l eav es u s wi t h an imp res s iv e nu mber of C PUs t h at cou l d
s ol v e d el egated GP s u bt as ks i ns t ead of being id l e.
i Genet i c p r ogr ammi ng requ ires s u bs t ant i al comp u t i ng res ou rces in
ord er t o p erf orm t h e t as k of breed ing generat i ons of comp l ex s t ru c-
t u res . Pr ogr ams can be cons id ered t o be j u s t s p ecial cas es of s u ch
s t ru ct u res . I t d oes not actu al l y mat t er t o GP wh et h er cros s ov er
works wi t h p ars e t rees , s t ri ngs , grap h s , or, s ay, bridge compon en ts.
Th e generat i on of general s t ru ct u res may become a maj or top ic of
GP in t h e f u tu re.
Th e id ea of generat i ng al l kind s of s t ru ct u res once more il l u s trates
t h e f l exibil ity of GP. A t l eas t one s t r engt h of GP comp ared t o ot h er
ev ol u tionary p arad i gms migh t be ment i oned h ere: its p ower t o h and l e
s ymbol ic exp res s ions . GP al s o h as its weaknes s es , l ike d ep end i ng
on exp l icit f itnes s meas u res . Th u s , t h ere is a great p ot ent i al f or
combi ni ng genetic p r ogr ammi ng wi t h ot h er p ar ad i gms i nt o h ybri d s
ap p rop ri at e f or cert ai n p robl em d omai ns .
Many real -worl d s i t u at i ons may wel l be s o comp l ex t h at exp l icit
f itnes s meas u res cannot be d ef ined . For i ns t ance, wh at is t h e f itnes s
f u nction f or ev ol v ing a p r ogr am tel l ing you wh en t o s el l and wh en t o
bu y s tocks and s h ares , f or control l ing traf f ic in a comp l ex h igh way
s ys t em, or f or s i mu l at i ng tis s u e growt h in an organi s m? Typ ical l y, we
are in t rou bl e wh en t ryi ng t o d ef ine a meaningf u l f itnes s meas u re f or
p robl ems t h at inv ol v e many i nt eract i ng ent i t i es wi t h d if f erent s t r at e-
gies in a d ynami c env i ronment . Th e t rou bl e aris es becau s e, in s u ch
s i t u at i ons , t h e u nd erl yi ng f itnes s l and s cap e becomes d ynami c and
cannot be d es cribed by a s t at i c f itnes s meas u re. -; .
S u ch s i t u at i ons are v ery s imil ar t o wh at h ap p ens in organic ev o-
l u tion. O rgani s ms ch ange th eir env i ronment , wh ich t h en ch anges
t h e organi s ms . Hence, it is i nt eres t i ng t o combine genetic p rogram-
mi ng and artif icial l if e: ev ol v ed p rograms s h ou l d rep res ent beh av ior
imp l icitl y ev al u at ed by p r ogr am- p r ogr am and p r ogr am- env i r onment
i nt eract i ons . I t is typ ical f or artif icial l if e env i ronment s t h at t h ere is
13.3 Conclusion TH
no exp l icit f itnes s meas u re. A certain entity continu es its exis tence
or v anis h es d u e to its s p ecif ic interaction with its env ironment.
S ome res earch h as al read y gone into combining genetic p rogram-
ming and artif icial l if e, s u ch as E RUNTI C LA B
1
or PHI LI A ,
2
th e l atter
a p roject imp l emented by s tu d ents at Dortmu nd Univ ers ity. GP f or
co-ev ol v ing agents in an env ironment is becoming a more wid es p read
tech niqu e [Lu ke and S p ector, 1996] [Qu res h i, 1996].
We ref erred to work on making el ectronic h ard ware ev ol v e "l ike Hardware Evolution
an organis m." May we, in th e f u tu re, exp ect GP to grow circu its
more comp l ex th an a binary ad d er or an as ymmetric band p as s f il ter
[Koza et al ., 1996b]? For ins tance, imagine a circu it th at rewires in
ord er to rep l ace th e l os t f u nctional ity of a d amaged s u bs ys tem, l ike
certain brain p arts may take ov er tas ks f rom d amaged p arts .
Work on combining genetic p rogramming with robotics h as al s o GP an d Robotics
been p res ented . Us u al l y, s u ch ap p roach es f ocu s on ev ol v ing a control
p rogram f or a mech anical d ev ice th at d oes not d ev el op or ev ol v e, l ike
a l ittl e mobil e robot. May we, in th e f u tu re, exp ect GP to grow and
evolve h ard ware in general , not ju s t el ectronic h ard ware? A bl end ing
of GP with nanotech nol ogy [Drexl er, 1992] cou l d be interes ting.
Meta-GP is anoth er area wh ere we can exp ect d ramatic p rogres s Meta-GP
in th e coming years . S el f -ad ap tation of p arameters of GP ru ns and
ev ol u tion of op erators th rou gh a GP s ys tem are is s u es th at h av e been
mentioned in th is book. With th e accel eration of GP s ys tems , th es e
areas wil l become more and more acces s ibl e f or res earch ers .
13.3 Conclusion
I t is ou r s trong bel ief th at, ov er th e next d ecad e, GP wil l make
p rogres s on th e ch al l enges we h av e p res ented and on oth er is s u es
mentioned . Th e qu es tion is : How f ar can we go? Th e ev ol u tion of
GP migh t its el f f ollow an imp rov ement l aw s imil ar to th e ones we can
obs erv e in nu merou s ev ol u tionary al gorith m ru ns : v ery f as t imp rov e-
ment ov er th e f irs t few years of its ev ol u tion, th en a grad u al d ecl ine
in s p eed u ntil p h as es of s tagnation are onl y occas ional l y interru p ted
by incremental imp rov ements .
GP mu s t be abl e to s cal e u p and generate s ol u tions f or p robl ems
d emand ing l arger s ol u tion p rograms . Th ere s h ou l d be cl earer gu id e-
l ines f or th e ap p l ication engineer, s o as to make GP ap p l ication l es s of
an art and more rou tine. O f f -th e-s h el f s of tware p ackages wou l d h el p
in th e emergence of commercial ap p l ications . GP mu s t al s o p rov e its
1
h ttp ://h anip .h amp s h ire.ed u /C C L/Projects /E ru nticLab/
2
h ttp ://l s l l -www.inf ormatik.u ni-d ortmu nd .d e/gp /p h il ia.h tml
E2J
13 Summary and Perspectives
wort h in more real -l if e ap p l i cat i ons and generat e money in l arge-s cal e
i nd u s t ri al ap p l ications .
We are s til l in t h e f irs t p h as e of rap i d p rogres s as more and more
res earch ers enter t h e f iel d of GP. I t is imp os s ibl e t o p red ict wh ere t h e
f iel d wil l be in t en years . A l l t h e ind ications are t h at , as t h e s p eed of
s of tware and h ard ware imp rov es , t h e l earning d omai ns t h at may be
ad d res s ed s u cces s f u l l y wi t h GP wil l grow. We s ee two mai n f actors
t h at wil l d et ermi ne t h e r at e and l ongev ity of t h at growt h .
GP Needs Speed Ret u r ni ng one l as t t i me t o t h e biol ogical met ap h or, great er s p eed
means t h at GP p op u l at i ons may become mu ch l arger and a GP ru n
may be abl e t o cond u ct a mu ch broad er s earch of t h e s p ace of p os -
s ibl e p rograms . Th e i mp ort ance of t h e massive p aral l el is m s een in
biol ogical ev ol u tion may be t h e key t o bet t er GP al gori t h ms . Th e
remarkabl e res u l ts of t h e Q/3 rep l icas e exp eri ment s inv ol v e l iteral l y
bil l ions of RNA mol ecu l es , al l ev ol v ing in p aral l el . Th e s ame is t ru e
f or t h e el egant and p romis ing S E LE X al gori t h m (C h ap t er 2). To-
d ay, ev en v ery l arge GP ru ns inv ol v e, p erh ap s , no more t h an one
mil l ion ind iv id u al s becau s e of t h e s p eed of p res ent-d ay h ard ware and
GP s ys t ems . A ccord ingl y, increas es in t h e s p eed of GP s of tware and
h ard ware wil l be one key f actor d et ermi ni ng GP' s growt h ov er t h e
next f ew years .
GP Needs Efficien cy S p eed is not t h e onl y f actor. I t is al s o i mp or t ant t o r et u r n again
t o ou r d is cu s s ion in C h ap t er 1 abou t GP' s p l ace among mach i ne
l earning s ys t ems . Th e p robl em rep res ent at i on and t h e ef f iciency of
t h e s earch al gori t h m are v ery i mp or t ant . I mp or t ant res earch and
innov ation l ies ah ead in imp rov ing t h e GP s earch al gori t h m.
I f increas es in GP s p eed are al s o accomp ani ed by increas es in t h e
ef f iciency of t h e GP s earch al gori t h m, it is p os s ibl e t h at we may al -
read y h av e begu n a h is toric mov e away f rom t h e "gu il d " era of wri t i ng
comp u t er p rograms toward an era wh ere we can, as Fri ed berg s aid
in 1958, tel l a comp u t er "p recis el y h ow t o l earn" - h ow t o p r ogr am
its el f and ot h er comp u t ers . E v en in t h e new era, h owev er, it wou l d
remai n our bu rd en t o s p ecif y t as ks wort h y of being l earned .
A Printed and Recorded
Resources
Th e f ol l owing URLs are al s o av ail abl e f rom th e h omep age of th is
book.
http://www.mkp.com/GP -Intro
Th e read er is ad v is ed to ch eck with th e URL to f ind th e mos t u p -to-
d ate inf ormation.
A. l Books on Genetic Programming
Koza, J.R. (1992). Gen etic Programmin g: On Programmin g
Computers by Mean s of Natural Selection . MI T Pres s , C am-
brid ge, MA .
h t t p : / / www-l el and . S t anf ord . ed u / ~p h red / j aws 1. h t ml
Kinnear, K.E . Jr. (ed .) (1994). A dvan ces in Gen etic Program-
min g. MI T Pres s , C ambrid ge, MA .
h t t p : / / www- cs - f acu i t y. S t anf or d . ed u / ~koza/ ai gp . h t ml
Koza, J.R. (1994). Gen etic Programmin g II: A utomatic Dis-
covery of Reusable Programs. MI T Pres s , C ambrid ge, MA .
h t t p : / / www-l el and . S t anf ord . ed u / ~p h red / j aws 2. h t ml
A ngel ine, P.J. and Kinnear, K.E . Jr. (ed s .) (1996). A dvan ces
in Gen etic Programmin g 2. MI T Pres s , C ambrid ge, MA .
h t t p : / / www- d ep t . cs . u cl . ac. u k/ s t af f / w. l angd on/ ai gp 2. h t ml
Koza, J.R. and Gol d berg, D. E . and Fogel , D. B. and Riol o,
R. L. (ed s .) (1996). Gen etic Programmin g 1996: Proceedin gs
of the First A n n ual Con feren ce. S tanf ord Univ ers ity, S tanf ord ,
C A . MI T Pres s , C ambrid ge, MA .
A Printed and Recorded Resources
Koza, J.R. and Deb, K. and Dorigo, M. and Fogel , D. B. and
Garzon, M. and I ba, H. and Riol o, R. L. (ed s .) (1997). Gen etic
Programmin g 1997: Proceedin gs of the Secon d A n n ual Con fer-
en ce. S tanf ord Univ ers ity, S tanf ord , C A . Morgan Kau f mann,
S an Francis co, C A .
A. 2 GP Video Tapes
Koza, J.R. and Rice, J. P. (1992). Gen etic Programmin g: The
Movie. MI T Pres s , C ambrid ge, MA .
Koza, J.R (1994). Gen etic Programmin g II Videotape: The
Next Gen eration . MI T Pres s , C ambrid ge, MA .
(1996). Gen etic Programmin g 1996: Video Proceedin gs of the
First A n n ual Con feren ce. S ou nd Ph oto S ynth es is , C A .
A. 3 Books on Evolutionary Algorithms
Hol l and , J.H. (1975 and 1995). A daptation in Natural an d A r-
tificial Systems. Univ ers ity of Mich igan Pres s , A nn A rbor, MI .
S ch wef el , H.-P. (1981 and 1995). Evolution an d Optimum Seek-
in g. Joh n Wil ey & S ons , New York.
Dav is , L. (ed .) (1987). Gen etic A lgorithms an d Simulated A n -
n ealin g. Pitman, Lond on.
Gol d berg, D. E . (1989). Gen etic A lgorithms in Search, Op-
timization , an d Machin e Learn in g. A d d is on-Wes l ey, Read ing,
MA .
Dav is , L. (1991). Han dbook of Gen etic A lgorithms. Van Nos -
trand Reinh ol d , New York.
Fogel , D.B. (1995). Evolution ary Computation . I E E E Pres s ,
New York.
Mich al ewicz, Z. (1992). Gen etic A lgorithms + Data Structures
= Evolution Programs. S p ringer-Verl ag, Berl in. 1996: 3rd ed i-
tion.
Mitch el l , M. (1996). A n In troduction to Gen etic A lgorithms.
MI T Pres s , C ambrid ge, MA .
S ome d is s ertations h av e al s o been p u bl is h ed in book f orm.
A. 4 Selected Journals
A. 4 Selected Journals
A daptive Behavior, MI T Pres s
A rtificial In telligen ce, Kl u wer A cad emic
A rtificial Life, MI T Pres s
Biological Cybern etics, S p ringer-Verl ag
BioSystems, E l s ev ier S cience
Complexity, A cad emic Pres s
Complex Systems, C omp l ex S ys tems Pu bl ications
Evolution ary Computation , MI T Pres s
IEEE Tran saction s on Evolution ary Computation , I E E E
IEEE Tran saction s on Systems, Man , an d Cybern etics, I E E E
Machin e Learn in g, Kl u wer A cad emic
Jc|]
B Information Available
on the Internet
Th e f ol l owing URLs are al s o av ail abl e f rom th e h omep age of th is
book.
http://www.mkp.com/GP-Intro
Th e read er is ad v is ed to ch eck with th e URL to f ind th e mos t u p -to-
d ate inf ormation.
B. l GP Tutorials
http://metricanet.com/people/j j f/gp/Tutorial/tutorial.html
http://research.germany.eu.net:8080/encore/www/Ql_5.htm
http://alphard.ethz.ch/gerber/approx/default.html
http://www.byte.com/art/9402/secl0/artl.htm
http://aif.wu-wien.ac.at/~geyers/archive/ga/gp/gp/node2.html
http://www.geneticprogramming.com
B.2 GP Frequently Asked Questions
http://www.salford.ac.uk/docs/depts/eee/gp2faq.html
http://www.salford.ac.uk/docs/depts/eee/gpfaq.html
B.3 GP Bibliographies
Th is al ways cl os e-to-comp l ete bibl iograp h y is being maintained by
Bil l Langd on:
f t p : / / i t p . cs . bh am. ac. u k/ p u b/ au t h or s / W. B. Langd on/ bi bl i o/ gp - bi bl i ogr ap h y. bi b
h t t p : / / l i i nwww. i r a. u ka. d e/ bi bl i ogr ap h y/ A i / genet i c. p r ogr ammi ng. h t ml
Jarmo A l and er's GP Bibl iograp h y:
h t t p : / / r ei mar i . u was a. f i / ~j al / gaGPbi b/ gaGPl i s t . h t ml
'IP*
IrfsIiM B Information Available on the Internet
B.4 GP Researchers
Lis ts of res earch ers and th eir h omep ages can be f ou nd on
h t t p : / / www- cs - f acu i t y. S t anf or d . ed u / ~koza/ gp er s . h t ml
h t t p : / / www. cs . u cl . ac. u k/ r es ear ch / genp r og/
h t t p : / / met r i canet . com/ p eop l e/ j j f / gp / GPp ages / mi s c. h t ml
Th is res ou rce of f ers v ariou s GP-oriented l inks and l inks to Koza's
p ap ers :
h t t p : / / www- l el and . s t and f or d . ed u / "p h r ed / j oh n. h t ml
B.5 General Evolutionary Computation
GGAA
http://www.aic.nrl.navy.mil/galist/
ENCORE
http://research.germany.eu.net:8080/encore/www/top.htm
Evolutionary Computation Page
http://rodin.cs.uh.edu/~twryu/genetic.html
B.6 Mailing Lists
Th ere are two genetic p rogramming e-mail ing l is ts : one gl obal l is t
with more th an 1000 res earch ers p articip ating, and one l ocal l is t f or
th e S an Francis co bay area. You may s u bs cribe to th e gl obal l is t by
s end ing a s u bs crip tion requ es t cons is ting of th e mes s age
s u bs cri be genetic-p rogramming
to
genetic programming-REQUESTScs.Stanford.edu
B.6 Mailing Lists
I f you wou l d l ike to u ns u bs cribe, s end a requ es t cons is ting of th e
mes s age
unsubscribe genetic-programming
to
genet i c p rogramming-RE QUE S TQcs .S tanf ord .ed u
Th e l ocal l is t annou nces th e p eriod ic genetic p rogramming l u nch es
h el d at S tanf ord to p eop l e in th e S an Francis co bay area. I t is occa-
s ional l y al s o u s ed to annou nce conf erence ev ents and jobs in th e bay
area. You can s u bs cribe to th e l ocal l is t by s end ing a s u bs crip tion
requ es t cons is ting of th e mes s age
s u bs cr i be ba-gp
to
ba-gp-REQUESTQcs.Stanford.edu
I f you wis h to u ns u bs cribe, s end a requ es t cons is ting of th e mes s age
u ns u bs cri be ba-gp
to
ba-gp -RE QUE S TQcs .S tanf ord .ed u
Related Mailing Lists and News Groups
Genetic al gorith m mail ing l is t
ga- l i s t - r equ es t Qai c. nr l . nav y. mi l
Genetic al gorith ms and neu ral networks mail ing l is t
gann- r equ es t Qcs . i as t at e. ed u
Genetic al gorith ms news grou p
US E NE T news grou p :
comp . ai . genet i c
A rtif icial l if e news grou p
US E NE T news grou p :
alife.bbs.ga
C GP Software
Th e f ol l owing URLs are al s o av ail abl e f rom th e h omep age of th is
book.
http://www.mkp.com/GP-Intro
Th e read er is ad v is ed to ch eck with th e URL to f ind th e mos t u p -to-
d ate inf ormation.
C. l Public Domain GP Systems
GP in C ++; au th or: A d am E ras er
f t p : / / f t p . s a l f or d . a c . u k/ p u b/ gp /
U l il GP; s ou rce: GA RA Ge
h t t p : / / gar age. cp s . ms u . ed u / s of t war e/ l i l - gp / i nd ex. h t ml
GP-QUI C K; au th or: A nd y S ingl eton
GP-QUI C K with d ata s tru ctu res (Bil l Langd on)
f t p : / / f t p . i o. com/ p u b/ genet i c- p r ogr ammi ng/ GPd at a- 20- au g- 95. t ar . Z
DGPC ; au th or: Dav id A nd re
h t t p : / / www- l el and . S t anf or d . ed u / ~p h r ed / gp . t ar . gz
Genetic Programming Kernel , C ++ cl as s l ibrary;
au th or: Hel mu t Horner
h t t p : / / ai f . wu - wi en. ac. at / ~geyer s / ar ch i v e/ gp k/ Dok/ ku r z/ ku r z. h t ml
S GPC -S imp l e Genetic Programming in C ;
au th ors : Wal ter A l d en Tackett, A v iram C armi
av ail abl e at th e genetic p rogramming FTP s ite
YA GPLI C -Yet A noth er Genetic Programming Library I n C
contact Tobias Bl ickl e: bl ickl e@tik.ee.eth z.ch
C ommon LI S P imp l ementation;
!
W
y^
L i ) f software
f t p : / / f t p . i o. com/ p u b/ genet i c- p r ogr ammi ng/ cod e/
koza-book-gp -i mp l ement at i on. l i s p
Th is is a LI S P imp l ementation of genetic p rogramming as d e-
s cribed Koza's f irs t book. Th ere is al s o a f il e containing s ou rce
f rom Koza's s econd book wh ich incl u d es A DFs .
GPX/A bs tractica
I nteractiv e ev ol u tion a l a Karl S ims
f t p : / / f t p . i o. com/ p u b/ genet i c- p r ogr ammi ng/ cod e/
a b s . t a r . Z
S ymbol ic regres s ion u s ing genetic p rogramming in MA THE MA T-
I C A
f t p : / / f t p . i o. com/ p u b/ genet i c- p r ogr ammi ng/ cod e/
GPS Regres s .m
A f ramework f or th e genetic p rogramming of neu ral networks
f t p : / / f t p . i o. com/ p u b/ genet i c- p r ogr ammi ng/ cod e/
cer ebr u m. t ar . Z
C.2 Commercial GP Software
Dis cip u l u s "", genetic p rogramming s of tware f or d es ktop PC s . Th is
tool ev ol v es mach ine cod e d irectl y and is f as t and ef f icient. Nice u s er
interf ace. Free v ers ion is av ail abl e at
http://www.aimlearning.com
C.3 Related Software Packages
D A V I N C I tree drawing tool
http://www.informatik.uni-bremen.de/~inform/forschung/
daVinci/daVinci.html
C.4 C + + Implementation Issues
http://www.fre.ri.emu.edu/~mcm/chapt.html
D Events
Th e f ol l owing URLs are al s o av ail abl e f rom th e h omep age of th is
book.
http://www.mkp.com/GP-Intro
Th e read er is ad v is ed to ch eck with th e URL to f ind th e mos t u p -to-
d ate inf ormation.
D. l GP Conferences
Th e annu al genetic p rogramming conf erence s eries s tarted in 1996.
I nf ormation abou t it can be f ou nd at
h t t p : / / www. cs . br and ei s . ed u / ~zi p p y/ gp - 96. h t ml
Th e Genetic Programming 1997 conf erence is p res ented at
h t t p : / / www- cs - f acu i t y. S t anf or d . ed u / ~koza/ gp 97. h t ml
Th e Genetic Programming 1998 conf erence is p res ented at
http://www.genetic-programming.org/
D.2 Related Conferences and Workshops
I C GA I nternational C onf erence on Genetic A l gorith ms (I C GA ) con-
f erence s eries
Gref ens tette, Joh n J. (ed .). Proceed ings of th e Firs t I nterna-
tional C onf erence on Genetic A l gorith ms and Th eir A p p l ica-
tions . Hil l s d al e, NJ. Lawrence E rl bau m A s s ociates . 1985.
Gref ens tette, Joh n J.(ed .). Proceed ings of th e S econd I nterna-
tional C onf erence on Genetic A l gorith ms . Hil l s d al e, NJ. Lawrence
E rl bau m A s s ociates . 1987.
S ch af f er, J. Dav id (ed .). Proceed ings of th e Th ird I nternational
C onf erence on Genetic A l gorith ms . S an Mateo, C A . Morgan
Kau f mann. 1989.
Bel ew, Rich ard and Booker, Las h on (ed s .). Proceed ings of th e
Fou rth I nternational C onf erence on Genetic A l gorith ms . S an
Mateo, C A . Morgan Kau f mann. 1991.
U t V C I I I S
Forres t, S tep h anie (ed .). Proceed ings of th e Fif th I nternational
C onf erence on Genetic A l gorith ms . S an Mateo, C A . Morgan
Kau f mann. 1993.
E s h el man, Larry (ed .). Proceed ings of th e S ixth I nternational
C onf erence on Genetic A l gorith ms . S an Francis co, C A . Morgan
Kau f mann. 1995.
Paral l el Probl em S ol v ing f rom Natu re (PPS N) conf erence s eries
S ch wef el , Hans -Pau l and Manner, Reinh ard (ed s .). Paral l el
Probl em S ol v ing f rom Natu re I . Vol u me 496 of Lectu re Notes
in C omp u ter S cience. Berl in. S p ringer-Verl ag. 1991.
Manner, Reinh ard and Mand erick, Bernard (ed s .). Paral l el
Probl em S ol v ing f rom Natu re I I . A ms terd am. North -Hol l and .
1992.
Dav id or, Yu v al and S ch wef el , Hans -Pau l and Manner, Reinh ard
(ed s .). Paral l el Probl em S ol v ing f rom Natu re I I I . Vol u me 866
of Lectu re Notes in C omp u ter S cience. Berl in. S p ringer-Verl ag.
1994.
E bel ing, Werner and Rech enberg, I ngo and S ch wef el , Hans -Pau l
and Voigt, Hans -Mich ael (ed s .). Paral l el Probl em S ol v ing f rom
Natu re I V. Vol u me 1141 of Lectu re Notes in C omp u ter S cience.
Berl in. S p ringer-Verl ag. 1996.
E v ol u tionary Programming (E P) conf erence s eries
Fogel , Dav id B. and A tmar, Wirt (ed s .). Proceed ings of th e
Firs t A nnu al C onf erence on E v ol u tionary Programming. S an
Diego, C A . E v ol u tionary Programming S ociety. 1992.
Fogel , Dav id B. and A tmar, Wirt (ed s .). Proceed ings of th e
S econd A nnu al C onf erence on E v ol u tionary Programming. S an
Diego, C A . E v ol u tionary Programming S ociety. 1993.
S ebal d , A nth ony V. and Fogel , Lawrence J. (ed s .). Proceed ings
of th e Th ird A nnu al C onf erence on E v ol u tionary Programming.
Riv er E d ge, NJ. Worl d S cientif ic. 1994.
McDonnel l , Joh n R. and Reynol d s , Robert G. and Fogel , Dav id
(ed s .). Proceed ings of th e Fou rth A nnu al C onf erence on E v o-
l u tionary Programming. C ambrid ge, MA . MI T Pres s . 1995.
Fogel , Lawrence J. and A ngel ine, Peter J. and Back, Th omas
(ed s .). Proceed ings of th e Fif th A nnu al C onf erence on E v ol u -
tionary Programming. C ambrid ge, MA . MI T Pres s . 1996.
D.2 Related Conferences and Workshops
I E E E I nternational C onf erence on E v ol u tionary C omp u tation (I C E C )
s eries
Proceed ings of th e Firs t I E E E C onf erence on E v ol u tionary C om-
p u tation. New York. I E E E Pres s . 1994.
Proceed ings of th e S econd I E E E C onf erence on E v ol u tionary
C omp u tation. New York. I E E E Pres s . 1995.
Proceed ings of th e Th ird I E E E C onf erence on E v ol u tionary
C omp u tation. New York. I E E E Pres s . 1996.
Fou nd ations O f Genetic A l gorith ms (FO GA ) s eries
Rawl ins , Gregory (ed .). Fou nd ations of Genetic A l gorith ms .
S an Mateo, C A . Morgan Kau f mann. 1991.
Wh itl ey, Darrel l (ed .). Proceed ings of th e Works h op on th e
Fou nd ations of Genetic A l gorith ms and C l as s if ier S ys tems . Vail ,
C O . Morgan Kau f mann. 1992.
Wh itl ey, Darrel l and Vos e, Mich ael (ed s .). Proceed ings of th e
Th ird Works h op on th e Fou nd ations of Genetic A l gorith ms .
S an Mateo, C A . Morgan Kau f mann. 1995.
Bel ew, Rich ard and Vos e, Mich ael (ed s .). Proceed ings of th e
Fou rth Works h op on th e Fou nd ations of Genetic A l gorith ms .
S an Mateo, C A . Morgan Kau f mann. 1997.
A rtif icial Lif e (A L) s eries
Brooks , Rod ney and Maes , Pattie (ed s .). Proceed ings of th e
Fou rth I nternational Works h op on th e S ynth es is and S imu l ation
of Liv ing S ys tems . C ambrid ge, MA . MI T Pres s . 1994.
E u rop ean C onf erence on A rtif icial Lif e (E C A L) s eries
Varel a, Francis co J. and Bou rgine, Pau l (ed s .). Toward a Prac-
tice of A u tonomou s S ys tems : Proceed ings of th e Firs t E u ro-
p ean C onf erence on A rtif icial Lif e. C ambrid ge, MA . MI T Pres s .
1992.
Moran, Fed erico and Moreno, A l v aro and Merel o, Ju an J. and
C h acon, Pabl o (ed s .). A d v ances in A rtif icial Lif e. Berl in. S p ringer-
Verl ag. 1995.
u events
O th ers
C liff, Dav e and Hu s band s , Ph il ip and Meyer, Jean-A rcad y and
Wil s on, S tewart W. (ed s .). Proceed ings of th e Th ird I nter-
national C onf erence on th e S imu l ation of A d ap tiv e Beh av ior.
C ambrid ge, MA . MI T Pres s . 1994.
Q A l tman, Ru s s and Bru tl ag, Dou gl as and Karp , Peter and Lath -
rop , Rich ard and S earl s , Dav id (ed s .). Proceed ings of th e S ec-
ond I nternational C onf erence on I ntel l igent S ys tems f or Mol ec-
u l ar Biol ogy. Menl o Park, C A . A A A I Pres s . 1994.
Bibliography
Bibliography
[A brams on and Hu nter, 1996] A brams on, M. and Hu nter, L. (1996).
C l as s if ication u s ing cu l tu ral co-ev ol u tion and genetic p rogram-
ming. I n Koza, J. R., Gol d berg, D. E ., Fogel , D. B., and Riol o,
R. L., ed itors , Gen etic Programmin g 1996: Proceedin gs of the First
A n n ual Con feren ce, p ages 249-254, S tanf ord Univ ers ity, C A . MI T
Pres s , C ambrid ge, MA .
[A h o, 1986] A h o, A . (1986). Compilers. A d d is on-Wes l ey, Lond on.
[A l and er, 1995] A l and er, J. T. (1995). A n ind exed bibl iograp h y of
genetic p rogramming. Rep ort S eries no 94-1-GP, Dep artment of
I nf ormation Tech nol ogy and I nd u s trial Management, Univ ers ity of
Vaas a, Finl and .
[A l ba et al ., 1996] A l ba, E ., C otta, C , and Troyo, J. J. (1996). Typ e-
cons trained genetic p rogramming f or ru l e-bas e d ef inition in f u zzy
l ogic control l ers . I n Koza, J. R., Gol d berg, D. E ., Fogel , D. B., and
Riol o, R. L., ed itors , Gen etic Programmin g 1996: Proceedin gs of
the First A n n ual Con feren ce, p ages 255-260, S tanf ord Univ ers ity,
C A . MI T Pres s , C ambrid ge, MA .
[A l tenberg, 1994a] A l tenberg, L. (1994a). E mergent p h enomena in
genetic p rogramming. I n S ebal d , A . V. and Fogel , L. J., ed itors ,
Evolution ary Programmin g Proceedin gs of the Third A n n ual
Con feren ce, p ages 233-241. Worl d S cientif ic, S ingap ore.
[A l tenberg, 1994b] A l tenberg, L. (1994b). Th e ev ol u tion of ev ol v -
abil ity in genetic p rogramming. I n Kinnear, Jr., K. E ., ed itor,
A dvan ces in Gen etic Programmin g, ch ap ter 3, p ages 47-74. MI T
Pres s , C ambrid ge, MA .
[A l tenberg, 1995] A l tenberg, L. (1995). Genome growth and th e
ev ol u tion of th e genotyp e-p h enotyp e map . I n Banzh af , W. and
E eckman, F. H., ed itors , Evolution as a Computation al Process.
S p ringer-Verl ag, Berl in, Germany.
[A nd re, 1994a] A nd re, D. (1994a). A u tomatical l y d ef ined f eatu res :
Th e s imu l taneou s ev ol u tion of 2-d imens ional f eatu re d etectors and
BiDiiograpny
an al gori t h m f or u s ing t h em. I n Ki nnear, Jr. , K. E ., ed itor, A d-
van ces in Gen etic Programmin g, ch ap t er 23, p ages 477-494. MI T
Pres s , C ambri d ge, MA .
[A nd re, 1994b] A nd re, D. (1994b). Learni ng and u p grad i ng ru l es
f or an O C R s ys t em u s ing genetic p rogrammi ng. I n Proceedin gs
of the 1994 IEEE World Con gress on Computation al In telligen ce,
O rl and o, FL. I E E E Pres s , New York.
[A nd re et al ., 1996a] A nd re, D. , Bennet t I I I , F. H., and Koza, J. R.
(1996a). Dis cov ery by genetic p rogrammi ng of a cel l u l ar au t omat a
ru l e t h at is bet t er t h an any known ru l e f or t h e maj ori t y cl as s if ica-
tion p robl em. I n Koza, J. R., Gol d berg, D. E . , Fogel , D. B. , and
Riol o, R. L., ed i t ors , Gen etic Programmin g 1996: Proceedin gs of
the First A n n ual Con feren ce, p ages 3- 11, S tanf ord Univ ers ity, C A .
MI T Pres s , C ambri d ge, MA .
[A nd re et al ., 1996b] A nd re, D. , Bennet t I I I , F. H., and Koza, J. R.
(1996b). E v ol u t i on of i nt ri cat e l ong-d is tance commu ni cat i on s ig-
nal s in cel l u l ar au t omat a u s ing genetic p rogrammi ng. I n A rtifi-
cial Life V: Proceedin gs of the Fifth In tern ation al Workshop on
the Syn thesis an d Simulation of Livin g Systems, v ol u me 1, Nara,
Jap an. MI T Pres s , C ambri d ge, MA .
[A nd re and Koza, 1996a] A nd re, D. and Koza, J. (1996a). A p ar-
al l el i mp l ement at i on of genetic p rogrammi ng t h at ach iev es s u p er-
l inear p erf ormance. I n A rabni a, H. R., ed itor, Proceedin gs of the
In tern ation al Con feren ce on Parallel an d Distributed Processin g
Techn iques an d A pplication s, v ol u me Vol u me I I I , p ages 1163-1174,
A t h ens , GA . C S RE A .
[A nd re and Koza, 1996b] A nd re, D. and Koza, J. R. (1996b). Par-
al l el genetic p rogrammi ng: A s cal abl e i mp l ement at i on u s ing t h e
t r ans p u t er network arch i t ect u re. I n A ngel ine, P. J. and Ki nnear,
Jr. , K. E . , ed itors , A dvan ces in Gen etic Programmin g 2, ch ap t er 16,
p ages 317-338. MI T Pres s , C ambri d ge, MA .
[A nd re and Tel l er, 1996] A nd re, D. and Tel l er, A . (1996). A s t u d y
in p r ogr am res p ons e and t h e negativ e ef f ects of i nt rons in genetic
p rogrammi ng. I n Koza, J. R., Gol d berg, D. E . , Fogel , D. B. , and
Riol o, R. L., ed itors , Gen etic Programmin g 1996: Proceedin gs of
the First A n n ual Con feren ce, p ages 12-20, S tanf ord Univ ers ity,
C A . MI T Pres s , C ambri d ge, MA .
[A nd rews and Prager, 1994] A nd rews , M. and Prager, R. (1994). Ge-
net i c p rogrammi ng f or t h e acqu is ition of d ou bl e au ct i on market
s t rat egi es . I n Kinnear, Jr. , K. E ., ed itor, A dvan ces in Gen etic
Bibliography
Programmin g, ch ap ter 16, p ages 355-368. MI T Pres s , C ambrid ge,
MA .
[A ngel ine, 1997] A ngel ine, P. (1997). S u btree cros s ov er: Bu il d ing
bl ock engine or macromu tation. I n Koza, J., Deb, K., Dorigo, M.,
Fogel , D., Garzon, M., I ba, H., and Riol o, R., ed itors , Gen etic
Programmin g 1997: Proceedin gs of the Secon d A n n ual Con feren ce,
July 13-16, 1997, p ages 9-17, S tanf ord Univ ers ity, S tanf ord , C A .
Morgan Kau f mann, S an Francis co, C A .
[A ngel ine, 1993] A ngel ine, P. J. (1993). Evolution ary A lgorithms an d
Emergen t In telligen ce. Ph D th es is , O h io S tate Univ ers ity.
[A ngel ine, 1994] A ngel ine, P. J. (1994). Genetic p rogramming and
emergent intel l igence. I n Kinnear, Jr., K. E ., ed itor, A dvan ces in
Gen etic Programmin g, ch ap ter 4, p ages 75-98. MI T Pres s , C am-
brid ge, MA .
[A ngel ine, 1996] A ngel ine, P. J. (1996). Two s el f -ad ap tiv e cros s ov er
op erators f or genetic p rogramming. I n A ngel ine, P. J. and Kinnear,
Jr., K. E ., ed itors , A dvan ces in Gen etic Programmin g 2, ch ap ter 5,
p ages 89-110. MI T Pres s , C ambrid ge, MA .
[A ngel ine and Pol l ack, 1992] A ngel ine, P. J. and Pol l ack, J. B.
(1992). Th e ev ol u tionary ind u ction of s u brou tines . I n Proceedin gs
of the Fourteen th A n n ual Con feren ce of the Cogn itive Scien ce So-
ciety, Bl oomington, I nd iana. Lawrence E rl bau m A s s ociates , Hil l s -
d al e, NJ.
[A ngel ine and Pol l ack, 1993] A ngel ine, P. J. and Pol l ack, J. B.
(1993). C omp etitiv e env ironments ev ol v e better s ol u tions f or com-
p l ex tas ks . I n Forres t, S ., ed itor, Proceedin gs of the 5th In tern a-
tion al Con feren ce on Gen etic A lgorithms, ICGA -93, p ages 264-
270, Univ ers ity of I l l inois at Urbana-C h amp aign. Morgan Kau f -
mann, S an Mateo, C A .
[A rms trong and Gecs ei, 1979] A rms trong, W. W. and Gecs ei, J.
(1979). A d ap tation al gorith ms f or binary tree networks . IEEE
Tran saction s on Systems, Man an d Cybern etics (SMC), 9:276-285.
[A rms trong and Green, 1985] A rms trong, W. W. and Green, M. W.
(1985). Th e d ynamics of articu l ated rigid bod ies f or p u rp os es of
animation, v ol u me 1, p ages 231-240. S p ringer-Verl ag, Berl in.
[A tkin and C oh en, 1993] A tkin, M. and C oh en, P. R. (1993). Genetic
p rogramming to l earn an agent's monitoring s trategy. I n Proceed-
in gs of the A A A I-93 Workshop on Learn in g A ction Models. A A A I ,
Menl o Park, C A .
piDiiograpny
[A tkin and C oh en, 1994] A tkin, M. S . and C oh en, P. R. (1994).
Learning monitoring s trategies : A d if f icu l t genetic p rogramming
ap p l ication. I n Proceedin gs of the 1994 IEEE World Con gress on
Computation al In telligen ce, p ages 328-332a, O rl and o, FL. I E E E
Pres s , New York.
[A tl an et al ., 1994] A tl an, L., Bonnet, J., and Nail l on, M. (1994).
Learning d is tribu ted reactiv e s trategies by genetic p rogramming
f or th e general job s h op p robl em. I n Proceedin gs of the 7th an n ual
Florida A rtificial In telligen ce Research Symposium, Pens acol a, FL.
I E E E Pres s , New York.
[Babov ic, 1995] Babov ic, V. (1995). Genetic mod el ind u ction bas ed
on exp erimental d ata. I n Proceedin gs of the XXVIth Con gress of
In tern ation al A ssociation for Hydraulics Research.
[Bal akris h nan and Honav ar, 1996] Bal akris h nan, K. and Honav ar,
V. (1996). O n s ens or ev ol u tion in robotics . I n Koza, J. R., Gol d -
berg, D. E ., Fogel , D. B., and Riol o, R. L., ed itors , Gen etic Pro-
grammin g 1996: Proceedin gs of the First A n n ual Con feren ce, p ages
455-460, S tanf ord Univ ers ity, C A . MI T Pres s , C ambrid ge, MA .
[Banzh af , 1993a] Banzh af , W. (1993a). Genetic p rogramming f or
p ed es trians . ME RL Tech nical Rep ort 93-03, Mits u bis h i E l ectric
Res earch Labs , C ambrid ge, MA .
[Banzh af , 1993b] Banzh af , W. (1993b). Genetic p rogramming f or
p ed es trians . I n Forres t, S ., ed itor, Proceedin gs of the 5th In ter-
n ation al Con feren ce on Gen etic A lgorithms, ICGA -93, p age 628,
Univ ers ity of I l l inois at Urbana-C h amp aign. Morgan Kau f mann,
S an Francis co, C A .
[Banzh af , 1994] Banzh af , W. (1994). Genotyp e-p h enotyp e-map p ing
and neu tral v ariation - A cas e s tu d y in genetic p rogramming. I n
Dav id or, Y., S ch wef el , H.-P., and M R., ed itors , Parallel Problem
Solvin g from Nature III.
[Banzh af et al ., 1996] Banzh af , W., Francone, F., and Nord in, P.
(1996). Th e ef f ect of extens iv e u s e of th e mu tation op erator on
general ization in genetic p rogramming u s ing s p ars e d ata s ets . I n
Voigt, H., E bel ing, W., Rech enberg, I ., and S ch wef el , H.-P., ed -
itors , Parallel Problem Solvin g From Nature IV. Proceedin gs of
the In tern ation al Con feren ce on Evolution ary Computation , v ol -
u me 1141 of Lecture Notes in Computer Scien ce, p ages 300-310,
Berl in. S p ringer-Verl ag, Berl in.
Bibliography
[Banzh af and Fried rich , 1994] Banzh af , W. and Fried rich , J. (1994).
E f f icient imp l ementation of GP in C ++ and as s embl er. (I n Ger-
man).
[Banzh af et al ., 1997a] Banzh af , W., Nord in, P., and O l mer, M.
(1997a). Generating ad ap tiv e beh av ior f or a real robot u s ing f u nc-
tion regres s ion with in genetic p rogramming. I n Koza, J. R., Deb,
K., Dorigo, M., Fogel , D. B., Garzon, M., I ba, H., and Riol o,
R. L., ed itors , Gen etic Programmin g 1997: Proceedin gs of the Sec-
on d A n n ual Con feren ce, p ages 35-43, S tanf ord Univ ers ity, C A ,
US A . Morgan Kau f mann.
[Banzh af et al ., 1997b] Banzh af , W., Nord in, P., and O l mer, M.
(1997b). Generating ad ap tiv e beh av ior f or a real robot u s ing f u nc-
tion regres s ion with in genetic p rogramming. I n Koza, J. R., Deb,
K., Dorigo, M., Fogel , D. B., Garzon, M., I ba, H., and Riol o, R. L.,
ed itors , Gen etic Programmin g 1997: Proceedin gs of the Secon d A n -
n ual Con feren ce, p ages 35-43, S tanf ord Univ ers ity, C A . Morgan
Kau f mann, S an Francis co, C A .
[Barnes , 1982] Barnes , J. G. (1982). Programmin g in A da. A d d is on-
Wes l ey, Lond on.
[Bartel and S zos tak, 1993] Bartel , D. and S zos tak, J. (1993). I s o-
l ation of new ribozymes f rom a l arge p ool of rand om s equ ences .
Scien ce, 261:1411-1418.
[Barto et al ., 1983] Barto, A ., S u tton, R., and A nd ers on, C . (1983).
Neu ronl ike el ements th at can s ol v e d if f icu l t l earning control p rob-
l ems . IEEE Tran saction s on Systems, Man , an d Cybern etics,
13:835-846.
[Beer and Gal l agh er, 1992] Beer, R. and Gal l agh er, J. (1992). E v ol v -
ing d ynamical neu ral nets works f or ad ap tiv e beh av ior. A daptive
Behavior, 1:92-122.
[Bel ad y and Leh man, 1985] Bel ad y, L. and Leh man, M. (1985). Soft-
ware Evolution . A d d is on-Wes l ey, Read ing, MA .
[Bengio et al ., 1994] Bengio, S ., Bengio, Y., and C l ou tier, J. (1994).
Us e of genetic p rogramming f or th e s earch of a new l earning ru l e f or
neu tral networks . I n Proceedin gs of the 1994 IEEE World Con gress
on Computation al In telligen ce, p ages 324-327, O rl and o, FL. I E E E
Pres s , New York.
[Bennett I I I , 1997] Bennett I I I , F. H. (1997). A mu l ti-s kil l ed robot
th at recognizes and res p ond s to d if f erent p robl em env ironments .
I n Koza, J. R., Deb, K., Dorigo, M., Fogel , D. B., Garzon, M., I ba,
H., and Riol o, R. L., ed itors , Gen etic Programmin g 1991: Pro-
ceedin gs of the Secon d A n n ual Con feren ce, p ages 44-51, S tanf ord
Univ ers ity, C A . Morgan Kau f mann, S an Francis co, C A .
[Berns tein et al ., 1977] Berns tein, F., Koetzl e, T., Wil l iams , G.,
Meyer, J., Brice, M., J.R., R., Kennard , O ., S h imaou ch i, T., and
Tas u mi, M. (1977). Th e p rotein d ata bank: A comp u ter bas ed
arch iv al f ile f or macromol ecu l ar s tru ctu res . J. Mol.BioL, 112:535-
542.
[Bers ano-Begey et al ., 1996] Bers ano-Begey, T. F., Daid a, J. M.,
Ves ecky, J. F., and Lu d wig, F. L. (1996). A p l atf orm-ind ep end ent
col l aborativ e interf ace f or genetic p rogramming ap p l ications : I m-
age anal ys is f or s cientif ic inqu iry. I n Koza, J. R., ed itor, Late Break-
in g Papers at the Gen etic Programmin g 1996 Con feren ce, p ages
1-8, S tanf ord Univ ers ity, C A . S tanf ord Books tore, S tanf ord , C A .
[Bettenh au s en et al ., 1995a] Bettenh au s en, K. D., Geh l en, S .,
Marenbach , P., and Tol l e, H. (1995a). BioX++ - New res u l ts and
concep tions concerning th e intel l igent control of biotech nol ogical
p roces s es . I n Mu nack, A . and S ch K., ed itors , 6th In tern ation al
Con feren ce on Computer A pplication s in Biotechn ology.
[Bettenh au s en et al ., 1995b] Bettenh au s en, K. D., Marenbach , P.,
Freyer, S ., Rettenmaier, H., and Nieken, U. (1995b). S elf-
organizing s tru ctu red mod el ing of a biotech nol ogical f ed -batch f er-
mentation by means of genetic p rogramming. I n Zal zal a, A . M. S .,
ed itor, First In tern ation al Con feren ce on Gen etic A lgorithms in
En gin eerin g Systems: In n ovation s an d A pplication s, GA LESIA ,
v ol u me 414, p ages 481-486, S h ef f iel d , UK. I E E , Lond on, UK.
[Beyer, 1995] Beyer, H. (1995). Toward a th eory of ev ol u tion s trate-
gies : O n th e benef it of s ex - th e (/////, A )-s trategy. Evolution ary
Computation , 3:81-111.
[Bieth ah n and Nis s en, 1995] Bieth ah n, J. and Nis s en, V. E . (1995).
Evolution ary A lgorithms in Man agemen t A pplication s. S p ringer-
Verl ag, Berl in.
[Bl ickl e, 1996] Bl ickl e, T. (1996). E v ol v ing comp act s ol u tions in ge-
netic p rogramming: A cas e s tu d y. I n Voigt, H.-M., E bel ing, W.,
Rech enberg, I ., and S ch wef el , H.-P., ed itors , Parallel Problem Solv-
in g From Nature IV. Proceedin gs of the In tern ation al Con feren ce
on Evolution ary Computation , v ol u me 1141 of Lecture Notes in
Computer Scien ce, p ages 564-573, Berl in. S p ringer-Verl ag, Berl in,
Germany.
[Bl ickl e and Th iel e, 1995] Bl ickl e, T. and Th iel e, L. (1995). A com-
p aris on of s el ection s ch emes u s ed in genetic al gorith ms . TI K-
Rep ort 11, TI K I ns titu t f u r Tech nis ch e I nf ormatik u nd Kommu -
nikations netze, C omp u ter E ngineering and Networks Laboratory,
E TH, S wis s Fed eral I ns titu te of Tech nol ogy, Gl orias tras s e 35, 8092
Zu rich , S witzerl and .
[Brav e, 1994] Brav e, S . (1994). E v ol u tion of p l anning: Us ing recu r-
s iv e tech niqu es in genetic p l anning. I n Koza, J. R., ed itor, A rtificial
Life at Stan ford 1994, p ages 1-10. S tanf ord Books tore, S tanf ord ,
C A .
[Brav e, 1995] Brav e, S . (1995). Us ing genetic p rogramming to ev ol v e
recu rs iv e p rograms f or tree s earch . I n Lou is , S ., ed itor, Fourth
Golden West Con feren ce on In telligen t Systems, p ages 60-65. I n-
ternational S ociety f or C omp u ters and th eir A p p l ications , I S C A .
[Brav e, 1996] Brav e, S . (1996). E v ol v ing d eterminis tic f inite au -
tomata u s ing cel l u l ar encod ing. I n Koza, J. R., Gol d berg, D. E .,
Fogel , D. B., and Riol o, R. L., ed itors , Gen etic Programmin g 1996:
Proceedin gs of the First A n n ual Con feren ce, p ages 39-44, S tanf ord
Univ ers ity, C A . MI T Pres s , C ambrid ge, MA .
[Bremermann, 1962] Bremermann, H. (1962). O p timization th rou gh
ev ol u tion and recombination. I n Yov its , M., Jacobi, G., and Gol d -
s tein, G., ed itors , Self-Organ izin g Systems, p ages 93-106. S p artan
Books , New York.
[Bru ce, 1996] Bru ce, W. S . (1996). A u tomatic generation of object-
oriented p rograms u s ing genetic p rogramming. I n Koza, J. R.,
Gol d berg, D. E ., Fogel , D. B., and Riol o, R. L., ed itors , Gen etic
Programmin g 1996: Proceedin gs of the First A n n ual Con feren ce,
p ages 267-272, S tanf ord Univ ers ity, C A . MI T Pres s , C ambrid ge,
MA .
[Bu l mer, 1980] Bu l mer, M. G. (1980). The Mathematical Theory of
Quan titative Gen etics. C l arend on Pres s , O xf ord , UK.
[C acou Uos , 1966] C acou Uos , T. (1966). E s timation of a mu l tiv ariate
d ens ity. A n n als of the In stitute of Statistical Mathematics (Tokyo),
18:179-189.
[C el ko, 1995] C el ko. J. (1995). SQL for Smarties: A dvan ced SQL
Programmin g. Morgan Kau f mann, S an Francis co, C A .
[C h en and Yeh , 1996] C h en, S .-H. and Yeh , C .-H. (1996). Genetic
p rogramming and th e ef f icient market h yp oth es is . I n Koza, J. R.,
Gol d berg, D. E ., Fogel , D. B., and Riol o, R. L., ed itors , Gen etic
Di u i i u g i a | j i i y
Programmin g 1996: Proceedin gs of the First A n n ual Con feren ce,
p ages 45-53, S tanf ord Univ ers ity, C A . MI T Pres s , C ambrid ge, MA .
[C h en and Yeh , 1997] C h en, S .-H. and Yeh , C .-H. (1997). Us ing ge-
netic p rogramming to mod el v ol atil ity in f inancial time s eries . I n
Koza, J. R., Deb, K., Dorigo, M., Fogel , D. B., Garzon, M., I ba,
H., and Riol o, R. L., ed itors , Gen etic Programmin g 1997: Pro-
ceedin gs of the Secon d A n n ual Con feren ce, p ages 58-63, S tanf ord
Univ ers ity, C A . Morgan Kau f mann, S an Francis co, C A .
[C h oi, 1996] C h oi, A . (1996). O p timizing l ocal area networks u s ing
genetic al gorith ms . I n Koza, J. R., Gol d berg, D. E ., Fogel , D. B..
and Riol o, R. L., ed itors , Gen etic Programmin g 1996: Proceedin gs
of the First A n n ual Con feren ce, p ages 467-472, S tanf ord Univ er-
s ity, C A . MI T Pres s , C ambrid ge, MA .
[C l ack et al ., 1996] C l ack, C , Farringd on, J., Lid wel l , P., and Yu , T.
(1996). A n ad ap tiv e d ocu ment cl as s if ication agent. Res earch Note
RN/96/45, Univ ers ity C ol l ege Lond on, Univ ers ity C ol l ege Lond on,
Dep t. of C omp u ter S cience, Lond on, UK. S u bmitted to BC S -E S 96.
[C oon, 1994] C oon, B. W. (1994). C ircu it s ynth es is th rou gh gene-
tic p rogramming. I n Koza, J. R., ed itor, Gen etic A lgorithms at
Stan ford 1994, p ages 11-20. S tanf ord Books tore, S tanf ord , C A .
[C ramer, 1985] C ramer, N. L. (1985). A rep res entation for th e ad ap -
tiv e generation of s imp l e s equ ential p rograms . I n Gref ens tette,
J. J., ed itor, Proceedin gs of an In tern ation al Con feren ce on Gen etic
A lgorithms an d the A pplication s, p ages 183-187, C arnegie-Mel l on
Univ ers ity, Pitts bu rgh , PA .
[C rep eau , 1995] C rep eau , R. L. (1995). Genetic ev ol u tion of ma-
ch ine l angu age s of tware. I n Ros ea, J. P., ed itor, Proceedin gs of the
Workshop on Gen etic Programmin g: From Theory to Real-World
A pplication s, p ages 121-134, Tah oe C ity, C A .
[C ros bie and S p af f ord , 1995] C ros bie, M. and S p af f ord , E . H. (1995).
A p p l ying genetic p rogramming to intru s ion d etection. I n S iegel ,
E . V. and Koza, J. R., ed itors , Workin g Notes for the A A A I Sym-
posium on Gen etic Programmin g, p ages 1-8, MI T, C ambrid ge,
MA . A A A I , Menl o Park, C A .
[C row and Kimu ra, 1970] C row, J. F. and Kimu ra, M. (1970). A n
in troduction to population gen etics theory. Bu rges s Pu bl . C o., Min-
neap ol is , MN.
[Daid a et al ., 1996a] Daid a, J. M., Bers ano-Begey, T. F., Ros s , S . J.,
and Ves ecky, J. F. (1996a). C omp u ter-as s is ted d es ign of image
cl as s if ication al gorith ms : Dynamic and s tatic f itnes s ev al u ations
in a s caf f ol d ed genetic p rogramming env ironment. I n Koza, J. R.,
Gol d berg, D. E ., Fogel , D. B., and Riol o, R. L., ed itors , Gen etic
Programmin g 1996: Proceedin gs of the First A n n ual Con feren ce,
p ages 279-284, S tanf ord Univ ers ity, C A . MI T Pres s , C ambrid ge,
MA .
[Daid a et al ., 1996b] Daid a, J. M., Hommes , J. D., Bers ano-Begey,
T. F., Ros s , S . J., and Ves ecky, J. F. (1996b). A l gorith m d is cov ery
u s ing th e genetic p rogramming p arad igm: E xtracting l ow-contras t
cu rv il inear f eatu res f rom S A R images of arctic ice. I n A ngel ine,
P. J. and Kinnear, Jr., K. E ., ed itors , A dvan ces in Gen etic Pro-
grammin g 2, ch ap ter 21, p ages 417-442. MI T Pres s , C ambrid ge,
MA .
[Daid a et al ., 1995] Daid a, J. M., Hommes , J. D., Ros s , S . J., and
Ves ecky, J. F. (1995). E xtracting cu rv il inear f eatu res f rom S A R
images of arctic ice: A l gorith m d is cov ery u s ing th e genetic p ro-
gramming p arad igm. I n S tein, T., ed itor, Proceedin gs of IEEE
In tern ation al Geoscien ce an d Remote Sen sin g, p ages 673-675, Fl o-
rence, I tal y. I E E E Pres s , New York.
[Dain, 1997] Dain, R. A . (1997). Genetic p rogramming f or mobil e
robot wal l -f ol l owing al gorith ms . I n Koza, J. R., Deb, K., Dorigo,
M., Fogel , D. B., Garzon, M., I ba, H., and Riol o, R. L., ed itors , Ge-
n etic Programmin g 1997: Proceedin gs of the Secon d A n n ual Con -
feren ce, p ages 70-76, S tanf ord Univ ers ity, C A . Morgan Kau f mann,
S an Francis co, C A .
[Darwin, 1859] Darwin, C . (1859). On the Origin of Species by Mean s
of Natural Selection or the Preservation of Favoured Races in the
Struggle for Life. Mu rray, Lond on, UK.
[Das et al ., 1994] Das , S ., Frangu id akis , T., Pap ka, M., DeFanti,
T. A ., and S and in, D. J. (1994). A genetic p rogramming ap p l ica-
tion in v irtu al real ity. I n Proceedin gs of the first IEEE Con feren ce
on Evolution ary Computation , v ol u me 1, p ages 480-484, O rl and o,
FL. I E E E Pres s , New York. Part of 1994 I E E E Worl d C ongres s
on C omp u tational I ntel l igence, O rl and o, FL.
[Das rath y, 1991] Das rath y (1991). Nearest Neighbor (NN) Norms:
NN Pattern Classification Techn iques. I E E E C omp u ter S ociety
Pres s , Los A l amitos , C A .
[Dawkins , 1987] Dawkins , R. (1987). The Blin d Watchmaker. Pen-
gu in Books , Lond on, UK.
[Dawkins , 1989] Dawkins , R. (1989). The Selfish Gen e. O xf ord Uni-
v ers ity Pres s , O xf ord , UK.
[DeGaris , 1993] DeGaris , H. (1993). E v ol v abl e h ard ware: Genetic
p rogramming of a Darwin mach ine. I n A l brech t, R. F., Reev es ,
C . R., and S teel e, N. C ., ed itors , Proc. of A rtificial Neural Nets an d
Gen etic A lgorithms, In n sbruck, A ustria, p ages 443-449. S p ringer-
Verl ag, Berl in.
[D'h aes el eer, 1994] D'h aes el eer, P. (1994). C ontext p res erv ing cros s -
ov er in genetic p rogramming. I n Proceedin gs of the 1994 IEEE
World Con gress on Computation al In telligen ce, v ol u me 1, p ages
256-261, O rl and o, FL. I E E E Pres s , New York.
[D'h aes el eer and Bl u ming, 1994] D'h aes el eer, P. and Bl u ming, J.
(1994). E f f ects of l ocal ity in ind iv id u al and p op u l ation ev ol u tion.
I n Kinnear, Jr., K. E ., ed itor, A dvan ces in Gen etic Programmin g,
ch ap ter 8, p ages 177-198. MI T Pres s , C ambrid ge, MA .
[Dickins on, 1994] Dickins on, A . (1994). E v ol u tion of d amage-
immu ne p rograms u s ing genetic p rogramming. I n Koza, J. R.,
ed itor, Gen etic A lgorithms at Stan ford 1994, p ages 21-30. S tan-
f ord Books tore, S tanf ord , C A .
[Dickmanns et al ., 1987] Dickmanns , D., S ch mid h u ber, J., and Win-
kl h of er, A . (1987). Der genetis ch e A l gorith mu s : E ine I mp l emen-
tieru ng in Prol og. Project, Tech nical Univ ers ity Mu nich , Mu nich .
[Dracop ou l os , 1997] Dracop ou l os , D. C . (1997). E v ol u tionary control
of a s atel l ite. I n Koza, J. R., Deb, K., Dorigo, M., Fogel , D. B.,
Garzon, M., I ba, H., and Riol o, R. L., ed itors , Gen etic Program-
min g 1997: Proceedin gs of the Secon d A n n ual Con feren ce, p ages
77-81, S tanf ord Univ ers ity, C A . Morgan Kau f mann, S an Francis co,
C A .
[Drech s l er et al ., 1996] Drech s l er, R., Becker, B., and Gockel , N.
(1996). A genetic al gorith m f or th e cons tru ction of s mal l and h igh l y
tes tabl e O KFDD circu its . I n Koza, J. R., Gol d berg, D. E ., Fogel ,
D. B., and Riol o, R. L., ed itors , Gen etic Programmin g 1996: Pro-
ceedin gs of the First A n n ual Con feren ce, p ages 473-478, S tanf ord
Univ ers ity, C A . MI T Pres s , C ambrid ge, MA .
[Drexl er, 1992] Drexl er, K. E . (1992). Nan osyst ems: Molecular Ma-
chin ery, Man ufacturin g, an d Computation . Wil ey I nters cience,
New York.
[Du nay et al ., 1994] Du nay, B. D., Petry, F. E ., and Bu ckl es , W. P.
(1994). Regu l ar l angu age ind u ction with genetic p rogramming. I n
Proceedin gs of the 1994 IEEE World Con gress on Computation al
In telligen ce, p ages 396-400, O rl and o, FL. I E E E Pres s , New York.
[Du nning and Dav is , 1996] Du nning, T. E . and Dav is , M. W. (1996).
E v ol u tionary al gorith ms f or natu ral l angu age p roces s ing. I n Koza,
J. R., ed itor, Late Breakin g Papers at the Gen etic Programmin g
1996 Con feren ce, p ages 16-23, S tanf ord Univ ers ity, C A . S tanf ord
Books tore, S tanf ord , C A .
[Du p re, 1987] Du p re, J. (1987). The latest on the best. Essays on
Evolution an Optimality. MI T Pres s , C ambrid ge, MA .
[Dworman et al ., 1996] Dworman, G., Kimbrou gh , S . O ., and Laing,
J. D. (1996). Bargaining by artif icial agents in two coal ition games :
A s tu d y in genetic p rogramming f or el ectronic commerce. I n Koza,
J. R., Gol d berg, D. E ., Fogel , D. B., and Riol o, R. L., ed itors ,
Gen etic Programmin g 1996: Proceedin gs of the First A n n ual Con -
feren ce, p ages 54-62, S tanf ord Univ ers ity, C A . MI T Pres s , C am-
brid ge, MA .
[Dzeros ki et al ., 1995] Dzeros ki, S ., Tod orov s ki, L., and Petrov s ki, I .
(1995). Dynamical s ys tem id entif ication with mach ine l earning.
I n Ros ea, J. P., ed itor, Proceedin gs of the Workshop on Gen etic
Programmin g: From Theory to Real- World A pplication s, p ages 50-
63, Tah oe C ity, C A .
[E h l ers , 1992] E h l ers , J. (1992). S eminar on cycl es . C omp u S erv e
I nf ormation S erv ice, I NVFO RUM, Library.
[E h renbu rg, 1996] E h renbu rg, H. (1996). I mp rov ed d irect acycl ic
grap h h and l ing and th e combine op erator in genetic p rogramming.
I n Koza, J. R., Gol d berg, D. E ., Fogel , D. B., and Riol o, R. L., ed -
itors , Gen etic Programmin g 1996: Proceedin gs of the First A n n ual
Con feren ce, p ages 285-291, S tanf ord Univ ers ity, C A . MI T Pres s ,
C ambrid ge, MA .
[E h renbu rg and v an Maanen, 1994] E h renbu rg, H. H. and v an Maa-
nen, H. A . N. (1994). A f inite au tomaton l earning s ys tem u s ing
genetic p rogramming. Neu roC ol t Tech Rep C S -R9458, Dep t. of
C omp u ter S cience, C WI , C entru m v oor Wis ku nd e en I nf ormatica,
C WI , P.O . Box 94079, 1090 GB A ms terd am, Th e Neth erl and s .
[E igen, 1992] E igen, M. (1992). Steps Toward Life. O xf ord Univ ers ity
Pres s , O xf ord , UK.
[E s p arcia-A l cazar and S h arman, 1996] E s p arcia-A l cazar, A . I . and
S h arman, K. (1996). S ome ap p l ications of genetic p rogramming
in d igital s ignal p roces s ing. I n Koza, J. R., ed itor, Late Breakin g
Papers at the Gen etic Programmin g 1996 Con feren ce, p ages 24-31,
S tanf ord Univ ers ity, C A . S tanf ord Books tore, S tanf ord , C A .
[E s p arcia-A l cazar and S h arman, 1997] E s p arcia-A l cazar, A . I . and
S h arman, K. (1997). E v ol v ing recu rrent neu ral network arch itec-
tu res by genetic p rogramming. I n Koza, J. R., Deb, K., Dorigo, M.,
Fogel , D. B., Garzon, M., I ba, H., and Riol o, R. L., ed itors , Ge-
n etic Programmin g 1997: Proceedin gs of the Secon d A n n ual Con -
feren ce, p ages 89-94, S tanf ord Univ ers ity, C A . Morgan Kau f mann,
S an Francis co, C A .
[Fagl ia and Vettu ri, 1996] Fagl ia, R. and Vettu ri, D. (1996). Motion
p l anning and d es ign of C A M mech anis ms by means of a genetic
al gorith m. I n Koza, J. R., Gol d berg, D. E ., Fogel , D. B., and
Riol o, R. L., ed itors , Gen etic Programmin g 1996: Proceedin gs of
the First A n n ual Con feren ce, p ages 479-484, S tanf ord Univ ers ity,
C A . MI T Pres s , C ambrid ge, MA .
[Fel l er, 1968] Fel l er, W. (1968). A n In troduction to Probability The-
ory an d Its A pplication s, Volume 1. Joh n Wil ey & S ons , New
York.
[Fel l er, 1971] Fel l er, W. (1971). A n In troduction to Probability The-
ory an d Its A pplication s, Volume 2. Joh n Wil ey & S ons , New
York.
[Fernand ez et al ., 1996] Fernand ez, J. J., Farry, K. A ., and
C h eath am, J. B. (1996). Wav ef orm recognition u s ing genetic p ro-
gramming: Th e myoel ectric s ignal recognition p robl em. I n Koza,
J. R., Gol d berg, D. E ., Fogel , D. B., and Riol o, R. L., ed itors ,
Gen etic Programmin g 1996: Proceedin gs of the First A n n ual Con -
feren ce, p ages 63-71, S tanf ord Univ ers ity, C A . MI T Pres s , C am-
brid ge, MA .
[Ferrer and Martin, 1995] Ferrer, G. J. and Martin, W. N. (1995).
Us ing genetic p rogramming to ev ol v e board ev al u ation f u nctions
f or a board game. I n 1995 IEEE Con feren ce on Evolution ary Com-
putation , v ol u me 2, p age 747, Perth , A u s tral ia. I E E E Pres s , New
York.
[Fitzp atrick et al ., 1984] Fitzp atrick, J. M., Gref ens tette, J., and
Van Gu ch t, D. (1984). I mage regis tration by genetic s earch . I n
Proceedin gs of IEEE Southeast Con feren ce, Pis cataway, NY. I E E E
Pres s , New York.
[Fogel , 1995] Fogel , D. B. (1995). Evolution ary Computation . I E E E
Pres s , New York.
[Fogel et al ., 1965] Fogel , L., O wens , A ., and Wal s h , M. (1965). A r-
tif icial intel l igence th rou gh a s imu l ation of ev ol u tion. I n Maxf iel d ,
M., C al l ah an, A ., and Fogel , L., ed itors , Biophysics an d Cybern etic
Systems, p ages 131-155.
[Fogel et al ., 1966] Fogel , L., O wens , A ., and Wal s h , M. (1966). A r-
tificial In telligen ce through Simulated Evolution . Joh n Wil ey &
S ons , New York.
[Francone et al ., 1996] Francone, F. D., Nord in, P., and Banzh af , W.
(1996). Bench marking th e general ization cap abil ities of a comp il ing
genetic p rogramming s ys tem u s ing s p ars e d ata s ets . I n Koza, J. R.,
Gol d berg, D. E ., Fogel , D. B., and Riol o, R. L., ed itors , Gen etic
Programmin g 1996: Proceedin gs of the First A n n ual Con feren ce,
p ages 72-80, S tanf ord Univ ers ity, C A . MI T Pres s , C ambrid ge, MA .
[Fras er and Ru s h , 1994] Fras er, A . P. and Ru s h , J. R. (1994).
Pu tting I NK into a BI Ro: A d is cu s s ion of p robl em d omain knowl -
ed ge f or ev ol u tionary robotics . I n Fogarty, T. C , ed itor, Evolution -
ary Computin g, v ol u me 865 of Lecture Notes in Computer Scien ce.
S p ringer-Verl ag, Berl in, Germany.
[Freitas , 1997] Freitas , A . A . (1997). A genetic p rogramming f rame-
work f or two d ata mining tas ks : C l as s if ication and general ized ru l e
ind u ction. I n Koza, J. R., Deb, K., Dorigo, M., Fogel , D. B., Gar-
zon, M., I ba, H., and Riol o, R. L., ed itors , Gen etic Programmin g
1997: Proceedin gs of the Secon d A n n ual Con feren ce, p ages 96-101,
S tanf ord Univ ers ity, C A . Morgan Kau f mann, S an Francis co, C A .
[Fried berg, 1958] Fried berg, R. (1958). A l earning mach ine, p art I .
IBM J. Research an d Developmen t, 2:2-13.
[Fried berg et al ., 1959] Fried berg, R., Du nh am, B., and North , J.
(1959). A l earning mach ine, p art I I . IBM J. of Research an d
Developmen t, 3:282-287.
[Fried rich and Banzh af , 1997] Fried rich , J. and Banzh af , W. (1997).
A s imp l e genetic comp il er s ys tem f or ef f icient genetic p rogramming
on C I S C -arch itectu res . Unp u bl is h ed .
[Fu jiki and Dickins on, 1987] Fu jiki, C . and Dickins on, J. (1987). Us -
ing th e genetic al gorith m to generate LI S P s ou rce cod e to s ol v e
th e p ris oner's d il emma. I n Gref ens tette, J. J., ed itor, Gen etic A l-
gorithms an d their A pplication s: Proceedin gs of the secon d in ter-
n ation al con feren ce on Gen etic A lgorithms, p ages 236-240, MI T,
C ambrid ge, MA . Lawrence E rl bau m A s s ociates , Hil l s d al e, NJ.
[Garces -Perez et al ., 1996] Garces -Perez, J., S ch oenef el d , D. A ., and
Wainwrigh t, R. L. (1996). S ol v ing f acil ity l ayou t p robl ems u s ing
genetic p rogramming. I n Koza, J. R., Gol d berg, D. E ., Fogel ,
D. B., and Riol o, R. L., ed itors , Gen etic Programmin g 1996: Pro-
ceedin gs of the First A n n ual Con feren ce, p ages 182-190, S tanf ord
Univ ers ity, C A . MIT Pres s , C ambrid ge, MA .
[Gath ercol e and Ros s , 1994] Gath ercol e, C . and Ros s , P. (1994). Dy-
namic training s u bs et s el ection f or s u p erv is ed l earning in genetic
p rogramming. I n Dav id or, Y., S ch wef el , H.-P., and M R., ed itors ,
Parallel Problem Solvin g from Nature III, v ol u me 866 of Lecture
Notes in Computer Scien ce.
[Gath ercol e and Ros s , 1997a] Gath ercol e, C . and Ros s , P. (1997a).
S mal l p op u l ations ov er many generations can beat l arge p op u l a-
tions ov er few generations in genetic p rogramming. I n Koza, J. R.,
Deb, K., Dorigo, M., Fogel , D. B., Garzon, M., I ba, H., and Riol o,
R. L., ed itors , Gen etic Programmin g 1997: Proceedin gs of the Sec-
on d A n n ual Con feren ce, p ages 111-118, S tanf ord Univ ers ity, C A .
Morgan Kau f mann, S an Francis co, C A .
[Gath ercol e and Ros s , 1997b] Gath ercol e, C . and Ros s , P. (1997b).
Tackl ing th e bool ean ev en N p arity p robl em with genetic p rogram-
ming and l imited -error f itnes s . I n Koza, J. R., Deb, K., Dorigo, M.,
Fogel , D. B., Garzon, M., I ba, H., and Riol o, R. L., ed itors , Gen etic
Programmin g 1997: Proceedin gs of the Secon d A n n ual Con feren ce,
p ages 119-127, S tanf ord Univ ers ity, C A . Morgan Kau f mann, S an
Francis co, C A .
[Gh anea-Hercock and E ras er, 1994] Gh anea-Hercock, R. and Fras er,
A . P. (1994). E v ol u tion of au tonomou s robot control arch itectu res .
I n Fogarty, T. C , ed itor, Evolution ary Computin g, v ol u me 865 of
Lecture Notes in Computer Scien ce. S p ringer-Verl ag, Berl in, Ger-
many.
[Gol d berg, 1989] Gol d berg, D. (1989). Gen etic A lgorithms in Search,
Optimization an d Machin e Learn in g. A d d is on-Wes l ey, Read ing,
MA .
[Gord on, 1994] Gord on, B. M. (1994). E xp l oring th e u nd erl ying
s tru ctu re of natu ral images th rou gh genetic p rogramming. I n Koza,
J. R., ed itor, Gen etic A lgorithms at Stan ford 1994, p ages 49-56.
S tanf ord Books tore, S tanf ord , C A .
[Gray et al ., 1996a] Gray, G. J., Mu rray-S mith , D. J., Li, Y., and
S h arman, K. C . (1996a). Nonl inear mod el s tru ctu re id entif ication
u s ing genetic p rogramming. I n Koza, J. R., ed itor, Late Breakin g
Papers at the Gen etic Programmin g 1996 Con feren ce, p ages 32-37,
S tanf ord Univ ers ity, C A . S tanf ord Books tore, S tanf ord , C A .
[Gray and Maxwel l , 1997] Gray, H. F. and Maxwel l , R. J. (1997).
Genetic p rogramming f or mu l ti-cl as s cl as s if ication of magnetic res -
onance s p ectros cop y d ata. I n Koza, J. R., Deb, K., Dorigo, M.,
Fogel , D. B., Garzon, M., I ba, H., and Riol o, R. L., ed itors , Gen etic
Programmin g 1997: Proceedin gs of the Secon d A n n ual Con feren ce,
p age 137, S tanf ord Univ ers ity, C A . Morgan Kau f mann, S an Fran-
cis co, C A .
[Gray et al ., 1996b] Gray, H. F., Maxwel l , R. J., Martinez-Perez, I .,
A ru s , C ., and C erd an, S . (1996b). Genetic p rogramming f or cl as s i-
f ication of brain tu mou rs f rom nu cl ear magnetic res onance biop s y
s p ectra. I n Koza, J. R., Gol d berg, D. E ., Fogel , D. B., and Ri-
ol o, R. L., ed itors , Gen etic Programmin g 1996: Proceedin gs of the
First A n n ual Con feren ce, p age 424, S tanf ord Univ ers ity, C A . MI T
Pres s , C ambrid ge, MA .
[Greef f and A l d rich , 1997] Greef f , D. J. and A l d rich , C . (1997). E v o-
l u tion of emp irical mod el s f or metal l u rgical p roces s s ys tems . I n
Koza, J. R., Deb, K., Dorigo, M., Fogel , D. B., Garzon, M., I ba, H.,
and Riol o, R. L., ed itors , Gen etic Programmin g 1997: Proceedin gs
of the Secon d A n n ual Con feren ce, p age 138, S tanf ord Univ ers ity,
C A . Morgan Kau f mann, S an Francis co, C A .
[Gref ens tette and Baker, 1989] Gref ens tette, J. J. and Baker, J. E .
(1989). How genetic al gorith ms work: A critical l ook at imp l icit
p aral l el is m. I n Proc. 3rd In tern ation al Con feren ce on Gen etic A l-
gorithms, p ages 20-27, S an Mateo, C A . Morgan Kau f mann, S an
Francis co, C A .
[Grimes , 1995] Grimes , C . A . (1995). A p p l ication of genetic tech -
niqu es to th e p l anning of rail way track maintenance work. I n Za-
l zal a, A . M. S ., ed itor, First In tern ation al Con feren ce on Gen etic
A lgorithms in En gin eerin g Systems: In n ovation s an d A pplication s,
GA LESIA , v ol u me 414, p ages 467-472.
[Gritz and Hah n, 1995] Gritz, L. and Hah n, J. (1995). Genetic p ro-
gramming f or articu l ated f igu re motion. J. of Visualization an d
Computer A n imation , 6:129-142.
[Gritz and Hah n, 1997] Gritz, L. and Hah n, J. K. (1997). Genetic
p rogramming ev ol u tion of control l ers f or 3-D ch aracter animation.
I n Koza, J. R., Deb, K., Dorigo, M., Fogel , D. B., Garzon, M., I ba,
H., and Riol o, R. L., ed itors , Gen etic Programmin g 1997: Proceed-
in gs of the Secon d A n n ual Con feren ce, p ages 139-146, S tanf ord
Univ ers ity, C A . Morgan Kau f mann, S an Francis co, C A .
[Gru au , 1992a] Gru au , F. (1992a). C el l u l ar encod ing of genetic neu -
ral networks . Tech nical rep ort 92-21, Laboratoire d e l 'l nf ormatiqu e
d u Paral l el is me. E col e Normal e S u p erieu re d e Lyon, France.
[Gru au , 1992b] Gru au , F. (1992b). Genetic s ynth es is of bool ean neu -
ral networks with a cel l rewriting d ev el op mental p roces s . I n S ch af -
f er, J. D. and Wh itl ey, D., ed itors , Proceedin gs of the Workshop
on Combin ation s of Gen etic A lgorithms an d Neural Networks (CO-
GA NN92), p ages 55-74. I E E E C omp u ter S ociety Pres s .
[Gru au , 1993] Gru au , F. (1993). Genetic s ynth es is of mod u l ar neu ral
networks . I n Forres t, S ., ed itor, Proceedin gs of the 5th In tern ation al
Con feren ce on Gen etic A lgorithms, ICGA -93, p ages 318-325, Uni-
v ers ity of I l l inois at Urbana-C h amp aign. Morgan Kau f mann, S an
Francis co, C A .
[Gru au , 1994a] Gru au , F. (1994a). Genetic micro p rogramming of
neu ral networks . I n Kinnear, Jr., K. E ., ed itor, A dvan ces in Gen etic
Programmin g, ch ap ter 24, p ages 495-518. MI T Pres s , C ambrid ge,
MA .
[Gru au , 1994b] Gru au , F. (1994b). Neural Network Syn thesis usin g
Cellular En codin g an d the Gen etic A lgorithm. Ph D th es is , Labora-
toire d e l 'l nf ormatiqu e d u Paral l el is me, E col e Normal e S u p erieu re
d e Lyon, France.
[Gru au , 1995] Gru au , F. (1995). A u tomatic d ef inition of mod u l ar
neu ral networks . A daptive Behaviour, 3(2):151-183.
[Gru au et al ., 1994] Gru au , F., Ratajs zczak, J., and Wiber, G.
(1994). A neu ral comp il er. Journ al of Theoretical Computer Sci-
en ce, 1834:1-52.
[Gru au and Wh itl ey, 1993] Gru au , F. and Wh itl ey, D. (1993).
A d d ing l earning to th e cel l u l ar d ev el op ment p roces s : a comp ar-
ativ e s tu d y. Evolution ary Computation , l (3):213-233.
[Gu s taf s on et al ., 1986] Gu s taf s on, D., Barrett, W., Bates , R., and
C ou ch , J. D. (1986). Compiler Con struction : Theory an d Practice.
S cience Res earch A s s oc.
[Hah n, 1988] Hah n, J. (1988). Real is tic animation of rigid bod ies .
Computer Graphics, 22:299-308.
[Haigh , 1978] Haigh , J. (1978). Th e accu mu l ation of d el eteriou s
genes in a p op u l ation Mu l l er's rach et. Theoretical Population
Biology, 14:251-267.
[Hamp o et al ., 1994] Hamp o, R. J., Bryant, B. D., and Marko, K. A .
(1994). I C engine mis f ire d etection al gorith m generation u s ing
genetic p rogramming. I n EUFIT'94, p ages 1674-1678, A ach en,
Germany. E LI TE Fou nd ation.
[Hamp o and Marko, 1992] Hamp o, R. J. and Marko, K. A . (1992).
A p p l ication of genetic p rogramming to control of v eh icl e s ys tems .
I n Proceedin gs of the In telligen t Vehicles '92 Symposium. Ju ne
29-Ju l y 1, 1992, Detroit, MI .
[Hand l ey, 1993a] Hand l ey, S . (1993a). A u tomatic l earning of a d etec-
tor f or al p h a-h el ices in p rotein s equ ences v ia genetic p rogramming.
I n Forres t, S ., ed itor, Proceedin gs of the 5th In tern ation al Con fer-
en ce on Gen etic A lgorithms, ICGA -93, p ages 271-278, Univ ers ity
of I l l inois at Urbana-C h amp aign. Morgan Kau f mann, S an Fran-
cis co, C A .
[Hand l ey, 1993b] Hand l ey, S . (1993b). Th e genetic p l anner: Th e au -
tomatic generation of p l ans f or a mobil e robot v ia genetic p rogram-
ming. I n Proceedin gs of the Eighth IEEE In tern ation al Symposium
on In telligen t Con trol, C h icago, I L.
[Hand l ey, 1994a] Hand l ey, S . (1994a). A u tomated l earning of a d e-
tector f or th e cores of a-h el ices in p rotein s equ ences v ia genetic
p rogramming. I n Proceedin gs of the 1994 IEEE World Con gress
on Computation al In telligen ce, v ol u me 1, p ages 474-479, O rl and o,
FL. I E E E Pres s , New York.
[Hand l ey, 1994b] Hand l ey, S . (1994b). Th e au tomatic generations of
p l ans f or a mobil e robot v ia genetic p rogramming with au tomat-
ical l y d ef ined f u nctions . I n Kinnear, Jr., K. E ., ed itor, A dvan ces
in Gen etic Programmin g, ch ap ter 18, p ages 391-407. MI T Pres s ,
C ambrid ge, MA .
[Hand l ey, 1995] Hand l ey, S . (1995). Pred icting wh eth er or not a 60-
bas e DNA s equ ence contains a central l y-l ocated s p l ice s ite u s ing
genetic p rogramming. I n Ros ea, J. P., ed itor, Proceedin gs of the
Workshop on Gen etic Programmin g: From Theory to Real-World
A pplication s, p ages 98-103, Tah oe C ity, C A .
[Hand l ey, 1996a] Hand l ey, S . (1996a). A new cl as s of f u nction s ets f or
s ol v ing s equ ence p robl ems . I n Koza, J. R., Gol d berg, D. E ., Fogel ,
D. B., and Riol o, R. L., ed itors , Gen etic Programmin g 1996: Pro-
ceedin gs of the First A n n ual Con feren ce, p ages 301-308, S tanf ord
Univ ers ity, C A . MI T Pres s , C ambrid ge, MA .
[Hand l ey, 1996b] Hand l ey, S . (1996b). Th e p red iction of th e d egree
of exp os u re to s ol v ent of amino acid res id u es v ia genetic p rogram-
ming. I n Koza, J. R., Gol d berg, D. E ., Fogel , D. B., and Riol o,
R. L., ed itors , Gen etic Programmin g 1996: Proceedin gs of the First
A n n ual Con feren ce, p ages 297-300, S tanf ord Univ ers ity, C A . MI T
Pres s , C ambrid ge, MA .
[Harris and Bu xton, 1996] Harris , C . and Bu xton, B. (1996). E v ol v -
ing ed ge d etectors . Res earch Note RN/96/3, UC L, Univ ers ity C ol -
l ege Lond on, Dep t. of C omp u ter S cience, Lond on, UK.
[Haynes et al ., 1996] Haynes , T., Gambl e, R., Knigh t, L.. and Wain-
wrigh t, R. (1996). E ntail ment f or s p ecif ication ref inement. I n Koza,
J. R., Gol d berg, D. E ., Fogel , D. B., and Riol o, R. L., ed itors ,
Gen etic Programmin g 1996: Proceedin gs of the First A n n ual Con -
feren ce, p ages 90-97, S tanf ord Univ ers ity, C A . MI T Pres s , C am-
brid ge, MA .
[Haynes et al ., 1995] Haynes , T. D., Wainwrigh t, R. L., and S en,
S . (1995). E v ol v ing coop erating s trategies . I n Les s er, V., ed i-
tor, Proceedin gs of the first In tern ation al Con feren ce on Multiple
A gen t Systems, p age 450, S an Francis co, C A . A A A I , Menl o Park,
C A /MI T Pres s , C ambrid ge, MA . Pos ter.
[Hech t-Niel s en, 1988] Hech t-Niel s en, R. (1988). Neurocomputin g.
A d d is on-Wes l ey, Read ing, MA .
[Hemmi et al ., 1994a] Hemmi, H., Mizogu ch i, J., and S h imoh ara, K.
(1994a). Dev el op ment and ev ol u tion of h ard ware beh av iou rs . I n
Brooks , R. and Maes , P., ed itors , A rtificial Life IV, p ages 371-376.
MI T Pres s .
[Hemmi et al ., 1994b] Hemmi, H., Mizogu ch i, J., and S h imoh ara, K.
(1994b). Hard ware ev ol u tion an HDL ap p roach . I n Proc. of
the Japan -US Symposium on Flexible A utomation . Th e I ns titu te
of S ys tems , C ontrol and I nf ormation E ngineers .
[Hickl in, 1986] Hickl in, J. F. (1986). A p p l ication of th e genetic al go-
rith m to au tomatic p rogram generation. Mas ter's th es is , Dep t. of
C omp u ter S cience, Univ ers ity of I d ah o.
[Hil l is , 1989] Hil l is , D. (1989). C o-ev ol v ing p aras ites . I n Forres t, S .,
ed itor, Emergen t Computation . MI T Pres s , C ambrid ge, MA .
[Hil l is , 1992] Hil l is , W. D. (1992). C o-ev ol v ing p aras ites imp rov e s im-
u l ated ev ol u tion as an op timization p roced u re. I n Langton, C . G.,
Tayl or, C , Farmer, J. D., and Ras mu s s en, S ., ed itors , A rtificial
Life II, v ol u me X of San te Fe In stitute Studies in the Scien ces of
Complexity, p ages 313-324. A d d is on-Wes l ey, Read ing, MA .
[Hinch l if f e et al , 1996] Hinch l if f e, M., Hid en, H., McKay, B., Wil l is ,
M., Th am, M., and Barton, G. (1996). Mod el l ing ch emical p ro-
ces s s ys tems u s ing a mu l ti-gene genetic p rogramming al gorith m.
I n Koza, J. R., ed itor, Late Breakin g Papers at the Gen etic Pro-
grammin g 1996 Con feren ce, p ages 56-65, S tanf ord Univ ers ity, C A .
S tanf ord Books tore, S tanf ord , C A .
[Hirs t, 1996] Hirs t, A . (1996). Notes on th e ev ol u tion of ad ap tiv e
h ard ware. I n Proc. 2n d In t. Con f. on A daptive Computin g in
En gin eerin g Design an d Con trol (A CEDC-96), Pl ymou th , UK,
h ttp ://kmi.op en.ac.u k/ monty/ev ol ad ap h wp ap er.h tml .
[Hol brook et al ., 1990] Hol brook, S ., Mu s kal , S ., and Kim, S . (1990).
Pred icting s u rf ace exp os u re of amino acid s f rom p roteins s equ ence.
Protein En gin eerin g, 3:659-665.
[Hol brook et al ., 1993] Hol brook, S ., Mu s kal , S ., and Kim, S . (1993).
Pred icting p rotein s tru ctu ral f eatu res with artif icial neu ral net-
works . I n Hu nter, L., ed itor, A rtificial In telligen ce an d Molecular
Biology, p ages 161-194. A A A I , Menl o Park, C A .
[Hol l and , 1975] Hol l and , J. (1975). A daptation in n atural an d artifi-
cial systems. MI T Pres s , C ambrid ge, MA .
[Hol l and , 1992] Hol l and , J. (1992). A daptation in n atural an d artifi-
cial systems. MI T Pres s , C ambrid ge, MA .
[Hol l and et al ., 1986] Hol l and , J., Hol yak, R., and Th agard , P.
(1986). In duction : Processes of In feren ce, Learn in g an d Discov-
ery. MI T Pres s , C ambrid ge, MA .
[Hol l and and Reitman, 1978] Hol l and , J. and Reitman, J. (1978).
C ognitiv e s ys tems bas ed on ad ap tiv e al gorith ms . I n Waterman, D.
and Hayes -Roth , F., ed itors , Pattern -Directed In feren ce Systems.
A cad emic Pres s , New York.
[Howl ey, 1996] Howl ey, B. (1996). Genetic p rogramming of near-
minimu m-time s p acecraf t attitu d e maneu v ers . I n Koza, J. R.,
Gol d berg, D. E ., Fogel , D. B., and Riol o, R. L., ed itors , Gen etic
Programmin g 1996: Proceedin gs of the First A n n ual Con feren ce,
p ages 98-106, S tanf ord Univ ers ity, C A . MI T Pres s , C ambrid ge,
MA .
[Howl ey, 1997] Howl ey, B. (1997). Genetic p rogramming and p ara-
metric s ens itiv ity: a cas e s tu d y in d ynamic control of a two l ink
manip u l ator. I n Koza, J. R., Deb, K., Dorigo, M., Fogel , D. B.,
Garzon, M., I ba, H., and Riol o, R. L., ed itors , Gen etic Program-
min g 1997: Proceedin gs of the Secon d A n n ual Con feren ce, p ages
180-185, S tanf ord Univ ers ity, C A . Morgan Kau f mann, S an Fran-
cis co, C A .
[Hu el s bergen, 1996] Hu el s bergen, L. (1996). Toward s imu l ated ev o-
l u tion of mach ine l angu age iteration. I n Koza, J. R., Gol d berg,
D. E ., Fogel , D. B., and Riol o, R. L., ed itors , Gen etic Programmin g
1996: Proceedin gs of the First A n n ual Con feren ce, p ages 315-320,
S tanf ord Univ ers ity, C A . MI T Pres s , C ambrid ge, MA .
[I ba, 1997] I ba, H. (1997). Mu l tip l e-agent l earning f or a robot nav -
igation tas k by genetic p rogramming. I n Koza, J. R., Deb, K.,
Dorigo, M., Fogel , D. B., Garzon, M., I ba, H., and Riol o, R. L.,
ed itors , Gen etic Programmin g 1997: Proceedin gs of the Secon d A n -
n ual Con feren ce, p ages 195-200, S tanf ord Univ ers ity, C A . Morgan
Kau f mann, S an Francis co, C A .
[I ba and d e Garis , 1996] I ba, H. and d e Garis , H. (1996). E xtend ing
genetic p rogramming with recombinativ e gu id ance. I n A ngel ine,
P. J. and Kinnear, Jr., K. E ., ed itors , A dvan ces in Gen etic Pro-
grammin g 2, ch ap ter 4, p ages 69-88. MI T Pres s , C ambrid ge, MA .
[I ba et al ., 1994] I ba, H., d e Garis , H., and S ato, T. (1994). Genetic
p rogramming with l ocal h il l -cl imbing. I n Dav id or, Y., S ch wef el ,
H.-P., and M R., ed itors , Parallel Problem Solvin g from Nature
III, v ol u me 866 of Lecture Notes in Computer Scien ce.
[I ba et al ., 1995a] I ba, H., d e Garis , H., and S ato, T. (1995a). Tem-
p oral d ata p roces s ing u s ing genetic p rogramming. I n E s h el man,
L., ed itor, Gen etic A lgorithms: Proceedin gs of the Sixth In tern a-
tion al Con feren ce (ICGA 95), p ages 279-286, Pitts bu rgh , PA . Mor-
gan Kau f mann, S an Francis co, C A .
[I ba et al ., 1993] I ba, H., Niwa, H., d e Garis , H., and S ato, T.
(1993). E v ol u tionary l earning of bool ean concep ts : A n emp irical
s tu d y. Tech nical Rep ort E TL-TR-93-25, E l ectrotech nical Labora-
tory, Ts u ku ba, Jap an.
[I ba et al ., 1995b] I ba, H., S ato, T., and d e Garis , H. (1995b). Nu -
merical genetic p rogramming f or s ys tem id entif ication. I n Ros ea,
J. P., ed itor, Proceedin gs of the Workshop on Gen etic Program-
min g: From Theory to Real-World A pplication s, p ages 64-75,
Tah oe C ity, C A .
[I v akh nenko, 1971] I v akh nenko, A . (1971). Pol ymonial th eory of
comp l ex s ys tems . IEEE Tran saction s on Systems, Man an d Cy-
bern etics, 1:364-378.
[Jacob, 1994] Jacob, C . (1994). Genetic L-s ys tem p rogramming. I n
Dav id or, Y., S ch wef el , H.-P., and M R., ed itors , Parallel Problem
Solvin g from Nature III, v ol u me 866 of Lecture Notes in Computer
Scien ce.
[Jacob, 1996a] Jacob, C . (1996a). E v ol v ing ev ol u tion p rograms : Ge-
netic p rogramming and L-s ys tems . I n Voigt, H., E bel ing, W.,
Rech enberg, I ., and S ch wef el , H., ed itors , Parallel Problem Solvin g
From Nature IV. Proceedin gs of the In tern ation al Con feren ce on
Evolution ary Computation , p ages 42-51, Berl in. S p ringer-Verl ag.
[Jacob, 1996b] Jacob, C . (1996b). E v ol v ing ev ol u tion p rograms : Ge-
netic p rogramming and L-s ys tems . I n Koza, J. R., Gol d berg, D. E .,
Fogel , D. B., and Riol o, R. L., ed itors , Gen etic Programmin g 1996:
Proceedin gs of the First A n n ual Con feren ce, p ages 107-115, S tan-
f ord Univ ers ity, C A . MI T Pres s , C ambrid ge, MA .
[Jannink, 1994] Jannink, J. (1994). C racking and co-ev ol v ing ran-
d omizers . I n Kinnear, Jr., K. E ., ed itor, A dvan ces in Gen etic Pro-
grammin g, ch ap ter 20, p ages 425-443. MI T Pres s , C ambrid ge, MA .
[Jiang and Bu tl er, 1996] Jiang, J. and Bu tl er, D. (1996). A n ad ap -
tiv e genetic al gorith m f or image d ata comp res s ion. I n Koza, J. R.,
ed itor, Late Breakin g Papers at the Gen etic Programmin g 1996
Con feren ce, p ages 83-87, S tanf ord Univ ers ity, C A . S tanf ord Book-
s tore, S tanf ord , C A .
[Joh anns en, 1911] Joh anns en, W. (1911). Th e genotyp e concep tion
of h ered ity. The A merican Naturalist, 45:129-159.
[Joh ns on et al ., 1994] Joh ns on, M. P., Maes , P., and Darrel l , T.
(1994). E v ol v ing v is u al rou tines . I n Brooks , R. A . and Maes ,
P., ed itors , A rtificial Life IV, Proceedin gs of the fourth In tern a-
tion al Workshop on the Syn thesis an d Simulation of Livin g Sys-
tems, p ages 198-209, MI T, C ambrid ge, MA . MI T Pres s , C am-
brid ge, MA .
[Jones , 1995] Jones , T. (1995). C ros s ov er, macromu tation, and
p op u l ation-bas ed s earch . I n E s h el man, L., ed itor, Gen etic
A lgorithms: Proceedin gs of the Sixth In tern ation al Con feren ce
(ICGA 95), p ages 310-317, Pitts bu rgh , PA . Morgan Kau f mann,
S an Francis co, C A .
[Ju el s and Wattenberg, 1995] Ju el s , A . and Wattenberg, M. (1995).
S toch as tic h il l cl imbing as a bas el ine meth od f or ev al u ating genetic
al gorith ms . Tech nical Rep ort C S D-94-834, Dep artment of C om-
p u ter S cience, Univ ers ity of C al if ornia at Berkel ey, Berkel ey, C A .
[Ju il l e and Pol l ack, 1996] Ju il l e, H. and Pol l ack, J. B. (1996). Mas -
s iv el y p aral l el genetic p rogramming. I n A ngel ine, P. J. and Kinn-
ear, Jr., K. E ., ed itors , A dvan ces in Gen etic Programmin g 2, ch ap -
ter 17, p ages 339-358. MI T Pres s , C ambrid ge, MA .
[Keith and Martin, 1994] Keith , M. J. and Martin, M. C . (1994).
Genetic p rogramming in C ++: I mp l ementation is s u es . I n Kinnear,
Jr., K. E ., ed itor, A dvan ces in Gen etic Programmin g, ch ap ter 13,
p ages 285-310. MIT Pres s , C ambrid ge, MA .
[Kel l er and Banzh af , 1994] Kel l er, R. and Banzh af , W. (1994). E x-
p l icit maintenance of genetic d iv ers ity on genos p aces .
h ttp ://l s l l -www.cs .u ni-d ortmu nd .d e/p eop l e/banzh af /
p u bl ications .h tml .
[Kel l er and Banzh af , 1996] Kel l er, R. E . and Banzh af , W. (1996).
Genetic p rogramming u s ing genotyp e-p h enotyp e map p ing f rom
l inear genomes into l inear p h enotyp es . I n Koza, J. R., Gol d berg,
D. E ., Fogel , D. B., and Riol o, R. L., ed itors , Gen etic Programmin g
1996: Proceedin gs of the First A n n ual Con feren ce, p ages 116-122,
S tanf ord Univ ers ity, C A . MI T Pres s , C ambrid ge, MA .
[Kernigh an et al ., 1988] Kernigh an, B. W., Tond o, C . L., and
Ritch ie, D. M. (1988). The C Programmin g Lan guage. Prentice
Hal l , E ngl ewood C l if f s , NJ.
[Kimu ra, 1983] Kimu ra, M. (1983). The Neutral Theory of Molecular
Evolution . C ambrid ge Univ ers ity Pres s , C ambrid ge, UK.
[Kinnear, Jr., 1993a] Kinnear, Jr., K. E . (1993a). E v ol v ing a s ort:
Les s ons in genetic p rogramming. I n Proceedin gs of the 1993 In ter-
n ation al Con feren ce on Neural Networks, v ol u me 2, S an Francis co,
C A . I E E E Pres s , New York.
[Kinnear, Jr., 1993b] Kinnear, Jr., K. E . (1993b). General ity and
d if f icu l ty in genetic p rogramming: E v ol v ing a s ort. I n Forres t, S .,
ed itor, Proceedin gs of the 5th In tern ation al Con feren ce on Gen e-
tic A lgorithms, ICGA -93, p ages 287-294, Univ ers ity of I l l inois at
Urbana-C h amp aign. Morgan Kau f mann, S an Francis co, C A .
[Kinnear, Jr., 1994] Kinnear, Jr., K. E . (1994). A l ternativ es in au to-
matic f u nction d ef inition: A comp aris on of p erf ormance. I n Kin-
near, Jr., K. E ., ed itor, A dvan ces in Gen etic Programmin g, ch ap -
ter 6, p ages 119-141. MI T Pres s , C ambrid ge, MA .
[Kirkeru d , 1989] Kirkeru d , B. (1989). Object-Orien ted Programmin g
with Simula. A d d is on-Wes l ey, Lond on.
[Kirkp atrick et al ., 1983] Kirkp atrick, S ., Gel att, C , and Vecch i, M.
(1983). O p timization by s imu l ated anneal ing. Scien ce, 220:671-
680.
[Kitano, 1990] Kitano, H. (1990). Des igning neu ral networks u s ing
genetic al gorith ms with grap h generation s ys tem. Complex Sys-
tems, 4:461-476.
[Knu th , 1981] Knu th , D. (1981). The A rt of Computer Programmin g.
Vol. 2: Semin umerical A lgorithms. A d d is on-Wes l ey, Read ing, MA ,
2nd ed ition.
[Koh onen, 1989] Koh onen, T. (1989). Self-organ ization an d A ssocia-
tive Memory. S p ringer-Verl ag, Berl in, 2nd ed ition.
[Kol mogorov , 1950] Kol mogorov , A . (1950). Foun dation s of the The-
ory of Probability. C h el s ea Pu bl is h ing C omp any, New York.
[Koza, 1989] Koza. J. R. (1989). Hierarch ical genetic al gorith ms op -
erating on p op u l ations of comp u ter p rograms . I n S rid h aran, N. S .,
ed itor, Proceedin gs of the Eleven th In tern ation al Join t Con feren ce
on A rtificial In telligen ce IJCA I-89, v ol u me 1, p ages 768-774. Mor-
gan Kau f mann, S an Francis co, C A .
[Koza, 1991] Koza, J. R. (1991). C oncep t f ormation and d ecis ion
tree ind u ction u s ing th e genetic p rogramming p arad igm. I n S ch we-
f el , H.-P. and Manner, R., ed itors , Parallel Problem Solvin g from
Nature-Proceedin gs of 1st Workshop, PPSN 1, v ol u me 496 of Lec-
ture Notes in Computer Scien ce, p ages 124-128. S p ringer-Verl ag,
Berl in, Germany.
[Koza, 1992a] Koza, J. R. (1992a). E v ol u tion of s u bs u mp tion u s ing
genetic p rogramming. I n Varel a, F. J. and Bou rgine, P., ed itors ,
Proceedin gs of the First European Con feren ce on A rtificial Life.
Towards a Practice of A uton omous Systems, p ages 110-119, Paris ,
France. MI T Pres s , C ambrid ge, MA .
[Koza, 1992b] Koza, J. R. (1992b). A genetic ap p roach to f ind ing a
control l er to back u p a tractor-trail er tru ck. I n Proceedin gs of the
1992 A merican Con trol Con feren ce, v ol u me I I I , p ages 2307-2311,
E v ans ton, I L. A merican A u tomatic C ontrol C ou ncil .
[Koza, 1992c] Koza, J. R. (1992c). A genetic ap p roach to th e tru ck
backer u p p er p robl em and th e inter-twined s p iral p robl em. I n Pro-
ceedin gs of IJCNN In tern ation al Join t Con feren ce on Neural Net-
works, v ol u me I V, p ages 310-318. I E E E Pres s , New York.
[Koza, 1992d ] Koza, J. R. (1992d ). Gen etic Programmin g: On the
Programmin g of Computers by Natural Selection . MI T Pres s , C am-
brid ge, MA .
[Koza, 1993a] Koza, J. R. (1993a). Dis cov ery of rewrite ru l es in Lin-
d enmayer s ys tems and s tate trans ition ru l es in cel l u l ar au tomata
v ia genetic p rogramming. I n Symposium on Pattern Formation
(SPF-93), C l aremont, C A .
[Koza, 1993b] Koza, J. R. (1993b). S imu l taneou s d is cov ery of d etec-
tors and a way of u s ing th e d etectors v ia genetic p rogramming. I n
1993 IEEE In tern ation al Con feren ce on Neural Networks, v ol u me
I I I , p ages 1794-1801, S an Francis co, C A . I E E E , New York.
[Koza, 1994a] Koza, J. R. (1994a). Gen etic Programmin g II: A uto-
matic Discovery of Reusable Programs. MI T Pres s , C ambrid ge,
MA .
[Koza, 1994b] Koza, J. R. (1994b). Recognizing p atterns in p rotein
s equ ences u s ing iteration-p erf orming cal cu l ations in genetic p ro-
gramming. I n 1994 IEEE World Con gress on Computation al In -
telligen ce, O rl and o, FL. I E E E Pres s , New York.
[Koza, 1995a] Koza, J. R. (1995a). E v ol v ing th e arch itectu re of a
mu l ti-p art p rogram in genetic p rogramming u s ing arch itectu re-
al tering op erations . I n McDonnel l , J. R., Reynol d s , R. G., and
Fogel , D. B., ed itors , Evolution ary Programmin g IV Proceedin gs
of the Fourth A n n ual Con feren ce on Evolution ary Programmin g.
p ages 695-717, S an Diego, C A . MI T Pres s , C ambrid ge, MA .
[Koza, 1995b] Koza, J. R. (1995b). Gene d u p l ication to enabl e ge-
netic p rogramming to concu rrentl y ev ol v e both th e arch itectu re
and work-p erf orming s tep s of a comp u ter p rogram. I n IJCA I-95
Proceedin gs of the Fourteen th In tern ation al Join t Con feren ce on
A rtificial In telligen ce, v ol u me 1, p ages 734-740, Montreal , Qu e-
bec, C anad a. Morgan Kau f mann, S an Francis co, C A .
[Koza and A nd re, 1996a] Koza, J. R. and A nd re, D. (1996a).
C l as s if ying p rotein s egments as trans membrane d omains u s ing
arch itectu re-al tering op erations in genetic p rogramming. I n A n-
gel ine, P. J. and Kinnear, Jr., K. E ., ed itors , A dvan ces in Gen etic
Programmin g 2, ch ap ter 8, p ages 155-176. MI T Pres s , C ambrid ge,
MA .
[Koza and A nd re, 1996b] Koza, J. R. and A nd re, D. (1996b). E v o-
l u tion of iteration in genetic p rogramming. I n Fogel , L. J., A nge-
l ine, P. J., and Baeck, T., ed itors , Evolution ary Programmin g V:
Proceedin gs of the Fifth A n n ual Con feren ce on Evolution ary Pro-
grammin g. MI T Pres s , C ambrid ge, MA .
[Koza et al ., 1996a] Koza, J. R., A nd re, D., Bennett I I I , F. H.. and
Keane, M. A . (1996a). Us e of au tomatical l y d enned f u nctions and
arch itectu re-al tering op erations in au tomated circu it s ynth es is u s -
ing genetic p rogramming. I n Koza, J. R., Gol d berg, D. E ., Fogel ,
D. B., and Riol o, R. L., ed itors , Gen etic Programmin g 1996: Pro-
ceedin gs of the First A n n ual Con feren ce, p ages 132-149, S tanf ord
Univ ers ity, C A . MI T Pres s , C ambrid ge, MA ,
[Koza et al ., 1996b] Koza, J. R., Bennett I I I , F. H., A nd re, D., and
Keane, M. A . (1996b). A u tomated WYWI WYG d es ign of both th e
top ol ogy and comp onent v al u es of el ectrical circu its u s ing genetic
p rogramming. I n Koza, J. R., Gol d berg, D. E ., Fogel , D. B., and
Riol o, R. L., ed itors , Gen etic Programmin g 1996: Proceedin gs of
the First A n n ual Con feren ce, p ages 123-131, S tanf ord Univ ers ity,
C A . MI T Pres s , C ambrid ge, MA .
[Koza et al ., 1996c] Koza, J. R., Bennett I I I , F. H., A nd re, D., and
Keane, M. A . (1996c). Fou r p robl ems f or wh ich a comp u ter p ro-
gram ev ol v ed by genetic p rogramming is comp etitiv e with h u man
p erf ormance. I n Proceedin gs of the 1996 IEEE In tern ation al Con -
feren ce on Evolution ary Computation , v ol u me 1, p ages 1-10. I E E E
Pres s , New York.
[Koza et al ., 1997a] Koza, J. R., Bennett I I I , F. H., Keane, M. A .,
and A nd re, D. (1997a). E v ol u tion of a time-op timal f l y-to con-
trol l er circu it u s ing genetic p rogramming. I n Koza, J. R., Deb, K.,
Dorigo, M., Fogel , D. B., Garzon, M., I ba, H., and Riol o, R. L.,
ed itors , Gen etic Programmin g 1997: Proceedin gs of the Secon d A n -
n ual Con feren ce, p ages 207-212, S tanf ord Univ ers ity, C A . Morgan
Kau f mann, S an Francis co, C A .
[Koza et al ., 1997b] Koza, J. R., Bennett I I I , F. H., Loh n, J., Du n-
l ap , F., Keane, M. A ., and A nd re, D. (1997b). Us e of arch itectu re-
al tering op erations to d ynamical l y ad ap t a th ree-way anal og s ou rce
id entif ication circu it to accommod ate a new s ou rce. I n Koza, J. R.,
Deb, K., Dorigo, M., Fogel , D. B., Garzon, M., I ba, H., and Riol o,
R. L., ed itors , Gen etic Programmin g 1997: Proceedin gs of the Sec-
on d A n n ual Con feren ce, p ages 213-221, S tanf ord Univ ers ity, C A .
Morgan Kau f mann, S an Francis co, C A .
[Koza and Keane, 1990] Koza, J. R. and Keane, M. A . (1990). C art
centering and broom bal ancing by genetical l y breed ing p op u l ations
of control s trategy p rograms . I n Proceedin gs of In tern ation al Join t
Con feren ce on Neural Networks, v ol u me I , p ages 198-201, Was h -
ington, DC . Lawrence E rl bau m A s s ociates , Hil l s d al e, NJ.
[Kraf t et al ., 1994] Kraf t, D. H., Petry, F. E ., Bu ckl es , W. P., and
S ad as iv an, T. (1994). Th e u s e of genetic p rogramming to bu il d
qu eries f or inf ormation retriev al . I n Proceedin gs of the 1994 IEEE
World Con gress on Computation al In telligen ce, p ages 468-473, O r-
l and o, FL. I E E E Pres s , New York.
[Lang, 1995] Lang, K. J. (1995). Hil l cl imbing beats genetic s earch on
a bool ean circu it s ynth es is of Koza's . I n Proceedin gs of the Twelfth
In tern ation al Con feren ce on Machin e Learn in g, Tah oe C ity, C A .
Morgan Kau f mann, S an Francis co, C A .
[Langd on, 1995a] Langd on, W. B. (1995a). Data s tru ctu res and ge-
netic p rogramming. Res earch Note RN/95/70, Univ ers ity C ol l ege
Lond on, Univ ers ity C ol l ege Lond on, Dep t. of C omp u ter S cience,
Lond on, UK.
[Langd on, 1995b] Langd on, W. B. (1995b). E v ol v ing d ata s tru c-
tu res u s ing genetic p rogramming. I n E s h el man, L., ed itor, Gen e-
tic A lgorithms: Proceedin gs of the Sixth In tern ation al Con feren ce
(ICGA 95), p ages 295-302, Pitts bu rgh , PA . Morgan Kau f mann,
S an Francis co, C A .
[Langd on, 1995c] Langd on, W. B. (1995c). E v ol v ing d ata s tru ctu res
u s ing genetic p rogramming. Res earch Note RN/95/1, UC L, Uni-
v ers ity C ol l ege Lond on, Dep t. of C omp u ter S cience, Lond on, UK.
[Langd on, 1996a] Langd on, W. B. (1996a). S ch ed u l ing maintenance
of el ectrical p ower trans mis s ion networks u s ing genetic p rogram-
ming. Res earch Note RN/96/49, Univ ers ity C ol l ege Lond on, Uni-
v ers ity C ol l ege Lond on, Dep t. of C omp u ter S cience, Lond on, UK.
[Langd on, 1996b] Langd on, W. B. (1996b). Us ing d ata s tru ctu res
with in genetic p rogramming. I n Koza, J. R., Gol d berg, D. E ., Fo-
gel , D. B., and Riol o, R. L., ed itors , Gen etic Programmin g 1996:
Proceedin gs of the First A n n ual Con feren ce, p ages 141-148, S tan-
f ord Univ ers ity, C A . MI T Pres s , C ambrid ge, MA .
[Langd on and Pol i, 1997] Langd on, W. B. and Pol i, R. (1997). A n
anal ys is of th e MA X p robl em in genetic p rogramming. I n Koza,
J. R., Deb, K., Dorigo, M., Fogel , D. B., Garzon, M., I ba, H., and
Riol o, R. L., ed itors , Gen etic Programmin g 1997: Proceedin gs of
the Secon d A n n ual Con feren ce, p ages 222-230, S tanf ord Univ ers ity,
C A . Morgan Kau f mann, S an Francis co, C A .
[Langd on and Qu res h i, 1995] Langd on, W. B. and Qu res h i, A .
(1995). Genetic p rogramming - comp u ters u s ing "natu ral s el ec-
tion" to generate p rograms . Res earch Note RN/95/76, Univ ers ity
C ol l ege Lond on, Univ ers ity C ol l ege Lond on, Dep t. of C omp u ter
S cience, Lond on, UK.
[Langl ey, 1996] Langl ey, P. (1996). Elemen ts of Machin e Learn in g.
Morgan Kau f mann, S an Francis co, C A .
[Lay, 1994] Lay, M.-Y. (1994). A p p l ication of genetic p rogramming
in anal yzing mu l tip l e s tead y s tates of d ynamical s ys tems . I n Pro-
ceedin gs of the 1994 IEEE World Con gress on Computation al In -
telligen ce, p ages 333-336b, O rl and o, FL. I E E E Pres s , New York.
[Lee, 1995] Lee, G. Y. (1995). E xp l icit mod el s f or ch aotic and nois y
time s eries th rou gh th e genetic recu rs iv e regres s ion. Unp u bl is h ed .
[Leh mer, 1951] Leh mer, D. (1951). I n Proc. 2n d Symp. on Large-
Scale Digital Calculatin g Machin ery Cambridge, p ages 141-146.
Harv ard Univ ers ity Pres s , C ambrid ge, MA .
[Lens berg, 1997] Lens berg, T. (1997). A genetic p rogramming ex-
p eriment on inv es tment beh av ior u nd er knigh tian u ncertainty. I n
Koza, J. R., Deb, K., Dorigo, M., Fogel , D. B., Garzon, M., I ba,
H., and Riol o, R. L., ed itors , Gen etic Programmin g 1997: Proceed-
in gs of the Secon d A n n ual Con feren ce, p ages 231-239, S tanf ord
Univ ers ity, C A . Morgan Kau f mann, S an Francis co, C A .
[Lent, 1994] Lent, B. (1994). E v ol u tion of trad e s trategies u s ing ge-
netic al gorith ms and genetic p rogramming. I n Koza, J. R., ed itor,
Gen etic A lgorithms at Stan ford 1994, p ages 87-98. S tanf ord Book-
s tore, S tanf ord , C A .
[Lev ens h tein, 1966] Lev ens h tein, A . (1966). Binary cod es cap abl e
of correcting d el etions , ins ertions , and rev ers al s . Soviet Physics-
Doklady, 10:703-710.
[Li and Vitanyi, 1997] Li, M. and Vitanyi, P. (1997). A n In troduction
to Kolmogorov Complexity an d its A pplication s. S p ringer-Verl ag,
Berl in, 2nd rev is ed and exp and ed ed ition.
[Lind enmayer, 1968] Lind enmayer, A . (1968). Math ematical mod el s
f or cel l u l ar interaction in d ev el op ment, p art I and I I . Journ al of
Theoretical Biology, 18:280-315.
[Loh mann, 1992] Loh mann, R. (1992). S tru ctu re ev ol u tion and in-
comp l ete ind u ction. I n Manner, R. and Mand erick, B., ed itors ,
Proceedin gs PPSN II, p ages 175-185. North -Hol l and , A ms terd am.
[Lott, 1994] Lott, C . G. (1994). Terrain f l attening by au tonomou s
robot: A genetic p rogramming ap p l ication. I n Koza, J. R., ed i-
tor, Gen etic A lgorithms at Stan ford 1994, p ages 99-109. S tanf ord
Books tore, S tanf ord , C A .
[Lu d v iks on, 1995] Lu d v iks on, A . (1995). Priv ate commu nication.
[Lu ke and S p ector, 1996] Lu ke, S . and S p ector, L. (1996). E v ol v ing
teamwork and coord ination with genetic p rogramming. I n Koza,
J. R., Gol d berg, D. E ., Fogel , D. B., and Riol o, R. L., ed itors ,
Gen etic Programmin g 1996: Proceedin gs of the First A n n ual Con -
feren ce, p ages 150-156, S tanf ord Univ ers ity, C A . MI T Pres s , C am-
brid ge, MA .
[Maniatis , 1991] Maniatis , T. (1991). Rev iew. Scien ce, 251:33-34.
[Mas and , 1994] Mas and , B. (1994). O p timis ing conf id ence of text
cl as s if ication by ev ol u tion of s ymbol ic exp res s ions . I n Kinnear, Jr.,
K. E ., ed itor, A dvan ces in Gen etic Programmin g, ch ap ter 21, p ages
445-458. MI T Pres s , C ambrid ge, MA .
[Mas and and Piates ky-S h ap iro, 1996] Mas and , B. and Piates ky-
S h ap iro, G. (1996). Dis cov ering time oriented abs tractions in h is -
torical d ata to op timize d ecis ion tree cl as s if ication. I n A ngel ine,
P. J. and Kinnear, Jr., K. E ., ed itors , A dvan ces in Gen etic Pro-
grammin g 2, ch ap ter 24, p ages 489-498. MI T Pres s , C ambrid ge,
MA .
[Mas ters , 1995a] Mas ters , T. (1995a). A dvan ced A lgorithms for Neu-
ral Networks. Joh n Wil ey & S ons , New York.
[Mas ters , 1995b] Mas ters , T. (1995b). Neural, Novel an d Hybrid A l-
gorithms for Time Series Prediction . Joh n Wil ey & S ons , New
York.
[Maynard -S mith , 1994] Maynard -S mith , J. (1994). Evolution ary Ge-
n etics. O xf ord Univ ers ity Pres s , O xf ord , UK.
[McKay et al ., 1995] McKay, B., Wil l is , M., and Barton, G. W.
(1995). O n th e ap p l ication of genetic p rogramming to ch emical
p roces s s ys tems . I n 1995 IEEE Con feren ce on Evolution ary Com-
putation , v ol u me 2, p ages 701-706, Perth , A u s tral ia. I E E E Pres s ,
New York.
[McKay et al ., 1996] McKay, B., Wil l is , M., Montagu e, G., and Bar-
ton, G. W. (1996). Us ing genetic p rogramming to d ev el op inf eren-
tial es timation al gorith ms . I n Koza, J. R., Gol d berg, D. E ., Fogel ,
D. B., and Riol o, R. L., ed itors , Gen etic Programmin g 1996: Pro-
ceedin gs of the First A n n ual Con feren ce, p ages 157-165, S tanf ord
Univ ers ity, C A . MI T Pres s , C ambrid ge, MA .
[McKnigh t et al ., 1994] McKnigh t, R., Wal l , R., and Hennigh au s en,
L. (1994). E xp res s ions of genomic and C DNA trans genes af ter
co-integration in trans genic mice. Tech nical Rep ort A RS Rep ort
Nu mber: 0000031671, United S tates Dep artment of A gricu l tu re,
National A gricu l tu ral Library.
[McPh ee and Mil l er, 1995] McPh ee, N. F. and Mil l er, J. D. (1995).
A ccu rate rep l ication in genetic p rogramming. I n E s h el man, L.,
ed itor, Gen etic A lgorithms: Proceedin gs of the Sixth In tern ation al
Con feren ce (ICGA 95), p ages 303-309, Pitts bu rgh , PA . Morgan
Kau f mann, S an Francis co, C A .
[Meh ta et al ., 1995] Meh ta, P., Heringa, J., and A rgos , P. (1995). A
s imp l e and f as t ap p roach to p red iction of p rotein s econd ary s tru c-
tu re f rom mu l tip l y al igned s equ ences with accu racy abov e 70%.
Protein Scien ce, 4:2517-2525.
[Meis el , 1972] Meis el , W. (1972). Computer-Orien ted A pproaches to
Pattern Recogn ition . A cad emic Pres s , New York.
[Mich al ewicz, 1994] Mich al ewicz, Z. (1994). Gen etic A lgorithms +
Data Structures = Evolution Programs. S p ringer-Verl ag, Berl in,
1996: 3rd ed ition.
[Mitch el l , 1996] Mitch el l , T. (1996). Machin e Learn in g. McGraw-
Hil l , New York.
[Mjol s nes s et al ., 1995] Mjol s nes s , E ., Garret, C , Reinitz, J., and
S h arp , D. (1995). Mod el l ing th e connection between d ev el op ment
and ev ol u tion: Prel iminary rep ort. I n Banzh af , W. and E eckman,
F., ed itors , Evolution an d Biocomputation . S p ringer-Verl ag, Berl in.
[Mjol s nes s et al ., 1988] Mjol s nes s , E ., S h arp , D., and A l bert, B.
(1988). S cal ing, mach ine l earning and genetic neu ral nets . Tech ni-
cal Rep ort LA -UR-88-142, Los A l amos National Laboratories .
[Mond ad a et al ., 1993] Mond ad a, F., Franzi, E ., and I enne, P.
(1993). Mobil e robot miniatu rization. I n Yos h ikawa, T. and
Miyazaki, F., ed itors , Experimen tal Robotics III: The 3rd In ter-
n ation al Symposium, Lectu re Notes in C ontrol and I nf ormation
S ciences , Vol , 200., Kyoto, Jap an. S p ringer-Verl ag, Berl in.
[Montana, 1994] Montana, D. J. (1994). S trongl y typ ed genetic p ro-
gramming. BBN Tech nical Rep ort #7866, Bol t Beranek and New-
man, C ambrid ge, MA .
[Morgan and S ch onf el d er, 1993] Morgan, J. and S ch onf el d er, J.
(1993). Programmin g in Fortran 90. A l f red Wal l er, O xf ord s h ire,
UK.
[Miih l enbein and S ch l ierkamp -Voos en, 1994] Mu h l enbein, H. and
S ch l ierkamp -Voos en, D. (1994). Th e s cience of breed ing and its
ap p l ication to th e breed er genetic al gorith m. Evolution ary Com-
putation , 1:335-360.
[Mu l l er, 1932] Mu l l er, H. J. (1932). S ome genetic as p ects of s ex. The
A merican Naturalist, 66:118-138.
[Mu l l oy et al ., 1996] Mu l l oy, B. S ., Riol o, R. L., and S av it, R. S .
(1996). Dynamics of genetic p rogramming and ch aotic time s eries
p red iction. I n Koza, J. R., Gol d berg, D. E ., Fogel , D. B., and
Riol o, R. L., ed itors , Gen etic Programmin g 1996: Proceedin gs of
the First A n n ual Con feren ce, p ages 166-174, S tanf ord Univ ers ity,
C A . MI T Pres s , C ambrid ge, MA .
[Ngo and Marks , 1993] Ngo, J. and Marks , J. (1993). Ph ys ical l y re-
al is tic motion s ynth es is in animation. Evolution ary Computation ,
l (3):235-268.
[Ngu yen and Hu ang, 1994] Ngu yen, T. and Hu ang, T. (1994). E v ol v -
abl e 3D mod el ing f or mod el -bas ed object recognition s ys tems . I n
Kinnear, Jr., K. E ., ed itor, A dvan ces in Gen etic Programmin g,
ch ap ter 22, p ages 459-475. MI T Pres s , C ambrid ge, MA .
[Ngu yen et al ., 1993] Ngu yen, T. C , Gol d berg, D. S ., and Hu ang,
T. S . (1993). E v ol v abl e mod el ing: s tru ctu ral ad ap tation th rou gh
h ierarch ical ev ol u tion f or 3-D mod el -bas ed v is ion. Tech nical rep ort,
Beckman I ns titu te and C oord inated S cience Laboratory, Univ er-
s ity of I l l inois , Urbana, I L.
[Nil s s on, 1971] Nil s s on, N. (1971). Problem-Solvin g Methods in A r-
tificial In telligen ce. McGraw-Hil l , New York.
[Nord in, 1997] Nord in, J. (1997). Evolution ary Program In duction of
Bin ary Machin e Code an d its A pplication . Kreh l -Verl ag, Miins ter,
Germany.
[Nord in, 1994] Nord in, P. (1994). A comp il ing genetic p rogramming
s ys tem th at d irectl y manip u l ates th e mach ine cod e. I n Kinnear,
Jr., K. E ., ed itor, A dvan ces in Gen etic Programmin g, ch ap ter 14,
p ages 311-331. MI T Pres s , C ambrid ge, MA .
[Nord in and Banzh af , 1995a] Nord in, P. and Banzh af , W. (1995a).
C omp l exity comp res s ion and ev ol u tion. I n E s h el man, L., ed itor,
Gen etic A lgorithms: Proceedin gs of the Sixth In tern ation al Con -
feren ce (ICGA 95), p ages 310-317, Pitts bu rgh , PA . Morgan Kau f -
mann, S an Francis co, C A .
[Nord in and Banzh af , 1995b] Nord in, P. and Banzh af , W. (1995b).
E v ol v ing Tu ring-comp l ete p rograms f or a regis ter mach ine with
s el f -mod if ying cod e. I n E s h el man, L., ed itor, Gen etic A lgorithms:
Proceedin gs of the Sixth In tern ation al Con feren ce (ICGA 95), p ages
318-325, Pitts bu rgh , PA . Morgan Kau f mann, S an Francis co, C A .
[Nord in and Banzh af , 1995c] Nord in, P. and Banzh af , W. (1995c).
Genetic p rogramming control l ing a miniatu re robot. I n S iegel ,
E . V. and Koza, J. R., ed itors , Workin g Notes for the A A A I Sym-
posium on Gen etic Programmin g, p ages 61-67, MI T, C ambrid ge,
MA . A A A I , Menl o Park, C A .
[Nord in and Banzh af , 1996] Nord in, P. and Banzh af , W. (1996). Pro-
grammatic comp res s ion of images and s ou nd . I n Koza, J. R., Gol d -
berg, D. E ., Fogel , D. B., and Riol o, R. L., ed itors , Gen etic Pro-
grammin g 1996: Proceedin gs of the First A n n ual Con feren ce, p ages
345-350, S tanf ord Univ ers ity, C A . MI T Pres s , C ambrid ge, MA .
[Nord in and Banzh af , 1997a] Nord in, P. and Banzh af , W. (1997a).
Genetic reas oning - ev ol v ing p roof s with genetic s earch . I n Koza,
J. R., Deb, K., Dorigo, M., Fogel , D. B., Garzon, M., I ba, H., and
Riol o, R. L., ed itors , Gen etic Programmin g 1997: Proceedin gs of
the Secon d A n n ual Con feren ce, Ju l y 13-16, S tanf ord Univ ers ity,
S tanf ord , C A . Morgan Kau f mann, S an Francis co, C A .
[Nord in and Banzh af , 1997b] Nord in, P. and Banzh af , W. (1997b).
A n on-l ine meth od to ev ol v e beh av ior and to control a miniatu re
robot in real time with genetic p rogramming. A daptive Behavior,
5:107-140.
[Nord in and Banzh af , 1997c] Nord in, P. and Banzh af , W. (1997c).
Real time control of a kh ep era robot u s ing genetic p rogramming.
Con trol an d Cybern etics, 26 (3).
[Nord in et al ., 1995] Nord in, P., Francone, F., and Banzh af , W.
(1995). E xp l icitl y d ef ined introns and d es tru ctiv e cros s ov er in ge-
netic p rogramming. I n Ros ea, J. P., ed itor, Proceedin gs of the
Workshop on Gen etic Programmin g: From Theory to Real-World
A pplication s, p ages 6-22, Tah oe C ity, C A .
[Nord in et al ., 1996] Nord in, P., Francone, F., and Banzh af , W.
(1996). E xp l icitl y d ef ined introns and d es tru ctiv e cros s ov er in ge-
netic p rogramming. I n A ngel ine, P. J. and Kinnear, Jr., K. E .,
ed itors , A dvan ces in Gen etic Programmin g 2, ch ap ter 6, p ages 111-
134. MI T Pres s , C ambrid ge, MA .
[O akl ey, 1993] O akl ey, E . H. N. (1993). S ignal f il tering and d ata
p roces s ing f or l as er rh eometry. Tech nical rep ort, I ns titu te of Nav al
Med icine, Ports mou th , UK.
[O akl ey, 1994a] O akl ey, E . H. N. (1994a). Th e ap p l ication of gene-
tic p rogramming to th e inv es tigation of s h ort, nois y, ch aotic d ata
s eries . I n Fogarty, T. C , ed itor, Evolution ary Computin g, v ol u me
865 of Lecture Notes in Computer Scien ce. S p ringer-Verl ag, Berl in,
Germany.
[O akl ey, 1994b] O akl ey, E . H. N. (1994b). Two s cientif ic ap p l ications
of genetic p rogramming: S tack f il ters and non-l inear equ ation f it-
ting to ch aotic d ata. I n Kinnear, Jr., K. E ., ed itor, A dvan ces
in Gen etic Programmin g, ch ap ter 17, p ages 369-389. MI T Pres s ,
C ambrid ge, MA .
[O akl ey, 1996] O akl ey, E . H. N. (1996). Genetic p rogramming, th e
ref l ection of ch aos , and th e boots trap : Toward s a u s ef u l tes t f or
ch aos . I n Koza, J. R., Gol d berg, D. E ., Fogel , D. B., and Riol o,
R. L., ed itors , Gen etic Programmin g 1996: Proceedin gs of the First
A n n ual Con feren ce, p ages 175-181, S tanf ord Univ ers ity, C A . MI T
Pres s , C ambrid ge, MA .
[O h no, 1970] O h no, S . (1970). Evolution by Gen e Duplication .
S p ringer-Verl ag, New York.
[O l mer et al , 1996] O l mer, M., Banzh af , W., and Nord in, P. (1996).
E v ol v ing real -time beh av ior mod u l es f or a real robot with genetic
p rogramming. I n Proceedin gs of the in tern ation al symposium on
robotics an d man ufacturin g, Montp el l ier, France.
[O p ens h aw and Tu rton, 1994] O p ens h aw, S . and Tu rton, I . (1994).
Bu il d ing new s p atial interaction mod el s u s ing genetic p rogram-
ming. I n Fogarty, T. C , ed itor, Evolution ary Computin g, v ol u me
865 of Lecture Notes in Computer Scien ce. S p ringer-Verl ag, Berl in,
Germany.
[O 'Reil l y, 1995] O 'Reil l y, U.-M. (1995). A n A n alysis of Gen etic Pro-
grammin g. Ph D th es is , C arl eton Univ ers ity, O ttawa-C arl eton I n-
s titu te f or C omp u ter S cience, O ttawa, O ntario, C anad a.
[O 'Reil l y and O p p ach er, 1992] O 'Reil l y, U. M. and O p p ach er, F.
(1992). Th e trou bl ing as p ects of a bu il d ing bl ock h yp oth es is f or ge-
netic p rogramming. Working Pap er 94-02-001, S anta Fe I ns titu te,
S anta Fe, NM.
[O 'Reil l y and O p p ach er, 1994a] O 'Reil l y, U.-M. and O p p ach er, F.
(1994a). Program s earch with a h ierarch ical v ariabl e l ength rep -
res entation: Genetic p rogramming, s imu l ated anneal ing and h il l
cl imbing. I n Dav id or, Y., S ch wef el , H.-P., and M R., ed itors , Par-
allel Problem Solvin g from Nature - PPSN III.
[O 'Reil l y and O p p ach er, 1994b] O 'Reil l y, U.-M. and O p p ach er, F.
(1994b). Us ing bu il d ing bl ock f u nctions to inv es tigate a bu il d ing
bl ock h yp oth es is f or genetic p rogramming. Working Pap er 94-02-
029, S anta Fe I ns titu te, S anta Fe, NM.
[O 'Reil l y and O p p ach er, 1995a] O 'Reil l y, U.-M. and O p p ach er, F.
(1995a). Hybrid ized cros s ov er-bas ed s earch tech niqu es f or p rogram
d is cov ery. I n Proceedin gs of the 1995 World Con feren ce on Evolu-
tion ary Computation , v ol u me 2, p age 573, Perth , A u s tral ia.
[O 'Reil l y and O p p ach er, 1995b] O 'Reil l y, U.-M. and O p p ach er, F.
(1995b). Th e trou bl ing as p ects of a bu il d ing bl ock h yp oth es is f or
genetic p rogramming. I n Wh itl ey, L. D. and Vos e, M. D., ed itors ,
Foun dation s of Gen etic A lgorithms 3, p ages 73-88, E s tes Park,
C O . Morgan Kau f mann, S an Francis co, C A .
[O 'Reil l y and O p p ach er, 1996] O 'Reil l y, U.-M. and O p p ach er, F.
(1996). A comp arativ e anal ys is of GP. I n A ngel ine, P. J. and
Kinnear, Jr., K. E ., ed itors , A dvan ces in Gen etic Programmin g 2,
ch ap ter 2, p ages 23-44. MI T Pres s , C ambrid ge, MA .
[O rgel , 1979] O rgel , L. (1979). S el ection in v itro. Proc. Royal Soc.
of Lon don .
[O s born et al ., 1995] O s born, T. R., C h arif , A ., Lamas , R., and Du -
bos s ars ky, E . (1995). Genetic l ogic p rogramming. I n 1995 IEEE
Con feren ce on Evolution ary Computation , v ol u me 2, p age 728,
Perth , A u s tral ia. I E E E Pres s , New York.
[O u s s aid ene et al ., 1996] O u s s aid ene, M., C h op ard , B., Pictet, O . V.,
and Tomas s ini, M. (1996). Paral l el genetic p rogramming: A n ap -
p l ication to trad ing mod el s ev ol u tion. I n Koza, J. R., Gol d berg,
D. E ., Fogel , D. B., and Riol o, R. L., ed itors , Gen etic Programmin g
1996: Proceedin gs of the First A n n ual Con feren ce, p ages 357-380,
S tanf ord Univ ers ity, C A . MI T Pres s , C ambrid ge, MA .
[Park and S ong, 1997] Park, Y. and S ong, M. (1997). Genetic p ro-
gramming ap p roach to s ens e cl u s tering in natu ral l angu age p ro-
ces s ing. I n Koza, J. R., Deb, K., Dorigo, M., Fogel , D. B., Garzon,
M., I ba, H., and Riol o, R. L., ed itors , Gen etic Programmin g 1997:
Proceedin gs of the Secon d A n n ual Con feren ce, p age 261, S tanf ord
Univ ers ity, C A . Morgan Kau f mann, S an Francis co, C A .
[Parzen, 1962] Parzen, E . (1962). O n es timation of a p robabil ity
d ens ity f u nction and mod e. A n n als of Mathematical Statistics,
33:1065-1076.
[Paters on and Liv es ey, 1997] Paters on, N. and Liv es ey, M. (1997).
E v ol v ing cach ing al gorith ms in C by genetic p rogramming. I n
Koza, J. R., Deb, K., Dorigo, M., Fogel , D. B., Garzon, M., I ba,
H., and Riol o, R. L., ed itors , Gen etic Programmin g 1997: Proceed-
in gs of the Secon d A n n ual Con feren ce, p ages 262-267, S tanf ord
Univ ers ity, C A . Morgan Kau f mann, S an Francis co, C A .
[Pei et al ., 1995] Pei, M., Good man, E ., Pu nch , W., and Ding, Y.
(1995). Fu rth er res earch on f eatu re s el ection and cl as s if ication u s -
ing genetic al gorith ms f or cl as s if ication and f eatu re extraction. I n
Proc. of the A n n ual Meetin g of the Classification Society of North
A merica, Denv er, C O .
[Perry, 1994] Perry, J. E . (1994). Th e ef f ect of p op u l ation enrich ment
in genetic p rogramming. I n Proceedin gs of the 1994 IEEE World
Con gress on Computation al In telligen ce, p ages 456-461, O rl and o,
FL. I E E E Pres s , New York.
[Pol i and C agnoni, 1997] Pol i, R. and C agnoni, S . (1997). Genetic
p rogramming with u s er-d riv en s el ection: E xp eriments on th e ev o-
l u tion of al gorith ms f or image enh ancement. I n Koza, J. R., Deb,
K., Dorigo, M., Fogel , D. B., Garzon, M., I ba, H., and Riol o, R. L.,
ed itors , Gen etic Programmin g 1997: Proceedin gs of the Secon d A n -
n ual Con feren ce, p ages 269-277, S tanf ord Univ ers ity, C A . Morgan
Kau f mann, S an Francis co, C A .
[Pol i and Langd on, 1997a] Pol i, R. and Langd on, W. B. (1997a). A n
exp erimental anal ys is of s ch ema creation, p rop agation and d is ru p -
tion in genetic p rogramming. I n Good man, E ., ed itor, Gen etic
A lgorithms: Proceedin gs of the Seven th In tern ation al Con feren ce,
Mich igan S tate Univ ers ity, E as t Lans ing, MI . Morgan Kau f mann,
S an Francis co, C A .
[Pol i and Langd on, 1997b] Pol i, R. and Langd on, W. B. (1997b). A
new s ch ema th eory f or genetic p rogramming with one-p oint cros s -
ov er and p oint mu tation. I n Koza, J. R., Deb, K., Dorigo, M., Fo-
gel , D. B., Garzon, M., I ba, H., and Riol o, R. L., ed itors , Gen etic
Programmin g 1997: Proceedin gs of the Secon d A n n ual Con feren ce,
p ages 278-285, S tanf ord Univ ers ity, C A . Morgan Kau f mann, S an
Francis co, C A .
[Pru s inkiewicz and Lind enmayer, 1990] Pru s inkiewicz, P. and Lin-
d enmayer, A . (1990). The A lgorithmic Beauty of Plan ts. S p ringer-
Verl ag, New York.
[Pu nch et al ., 1993] Pu nch , W., Good man, E ., and Pei, M. (1993).
Fu rth er res earch on f eatu re s el ection and cl as s if ication u s ing gene-
tic al gorith ms . I n Proceedin gs of the Fifth In tern ation al Con feren ce
on Gen etic A lgorithms, ICGA -93, p age 557. Morgan Kau f mann,
S an Mateo, C A .
[Qu inl an, 1979] Qu inl an, J. (1979). Dis cov ering ru l es by ind u ction
f rom l arge col l ections of examp l es . I n Mich ie, D., ed itor, In Expert
Systems in the Micro-electron ic A ge, p ages 168-201. E d inbu rgh
Univ ers ity Pres s , E d inbu rgh , UK.
[Qu inl an, 1993] Qu inl an, J. (1993). C4-5: Programs for Machin e
Learn in g. Morgan Kau f mann, S an Francis co, C A .
[Qu res h i, 1996] Qu res h i, A . (1996). E v ol v ing agents . Res earch Note
RN/96/4, UC L, Univ ers ity C ol l ege Lond on, Dep t. of C omp u ter
S cience, Lond on, UK.
[Rao and Rao, 1995] Rao, V. and Rao, H. (1995). C++, Neural Net-
works an d Fuzzy Logic. MI S :Pres s /M&T Books , New York, 2nd
ed ition.
[Raymer et al ., 1996] Raymer, M. L., Pu nch , W. F., Good man,
E . D., and Ku h n, L. A . (1996). Genetic p rogramming f or im-
p rov ed d ata mining: A n ap p l ication to th e bioch emis try of p rotein
interactions . I n Koza, J. R., Gol d berg, D. E ., Fogel , D. B., and
Riol o, R. L., ed itors , Gen etic Programmin g 1996: Proceedin gs of
the First A n n ual Con feren ce, p ages 375-380, S tanf ord Univ ers ity,
C A . MI T Pres s , C ambrid ge, MA .
[Rech enberg, 1994] Rech enberg, I . (1994). Evolution sstrategie '93.
Frommann Verl ag, S tu ttgart, Germany.
[Reynol d s , 1992] Reynol d s , C . W. (1992). A n ev ol v ed , v is ion-bas ed
beh av ioral mod el of coord inated grou p motion. I n Meyer, J.-A . and
Wil s on, S . W., ed itors , From A n imals to A n imats (Proceedin gs of
Simulation of A daptive Behaviour). MI T Pres s , C ambrid ge, MA .
[Reynol d s , 1994a] Reynol d s , C . W. (1994a). E v ol u tion of corrid or
f ol l owing beh av ior in a nois y worl d . I n Simulation of A daptive
Behaviour (SA B-94).
[Reynol d s , 1994b] Reynol d s , C . W. (1994b). E v ol u tion of obs tacl e
av oid ance beh av iou r: Us ing nois e to p romote robu s t s ol u tions . I n
Kinnear, Jr., K. E ., ed itor, A dvan ces in Gen etic Programmin g,
ch ap ter 10, p ages 221-241. MI T Pres s , C ambrid ge, MA .
[Ris s anen, 1984] Ris s anen, J. (1984). Univ ers al cod ing, inf ormation,
p red iction and es timation. IEEE Tran saction s on In formation
Theory, 30:629-636.
[Robins on and Mcl l roy, 1995a] Robins on, G. and Mcl l roy, P.
(1995a). E xp l oring s ome commercial ap p l ications of genetic p ro-
gramming. I n Fogarty, T. C , ed itor, Evolution ary Computin g, v ol -
u me 993 of Lecture Notes in Computer Scien ce. S p ringer-Verl ag,
Berl in, Germany.
[Robins on and Mcl l roy, 1995b] Robins on, G. and Mcl l roy, P.
(1995b). E xp l oring s ome commercial ap p l ications of genetic p ro-
gramming. Project 4487, Britis h Tel ecom, S ys tems Res earch Div i-
s ion, Martel s h am, I p s wich , UK.
[Ronge, 1996] Ronge, A . (1996). Genetic p rograms and co-ev ol u tion.
Tech nical Rep ort TRI TA -NA -E 9625, S tockh ol m Univ ers ity, Dep t.
of Nu merical A nal ys is and C omp u ter S cience.
[Ros ea, 1995a] Ros ea, J. (1995a). Toward s au tomatic d is cov ery of
bu il d ing bl ocks in genetic p rogramming. I n S iegel , E . V. and Koza,
J. R., ed itors , Workin g Notes for the A A A I Symposium on Gen etic
Programmin g, p ages 78-85, MI T, C ambrid ge, MA . A A A I , Menl o
Park, C A .
[Ros ea, 1995b] Ros ea, J. P. (1995b). E ntrop y-d riv en ad ap tiv e rep re-
s entation. I n Ros ea, J. P., ed itor, Proceedin gs of the Workshop on
Gen etic Programmin g: From Theory to Real-World A pplication s,
p ages 23-32, Tah oe C ity, C A .
[Ros ea, 1997] Ros ea, J. P. (1997). A nal ys is of comp l exity d rif t in
genetic p rogramming. I n Koza, J. R., Deb, K., Dorigo, M., Fogel ,
D. B., Garzon, M., I ba, H., and Riol o, R. L., ed itors , Gen etic
Programmin g 1997: Proceedin gs of the Secon d A n n ual Con feren ce,
p ages 286-294, S tanf ord Univ ers ity, C A . Morgan Kau f mann, S an
Francis co, C A .
[Ros ea and Bal l ard , 1994a] Ros ea, J. P. and Bal l ard , D. H. (1994a).
Genetic p rogramming with ad ap tiv e rep res entations . Tech nical Re-
p ort TR 489, Univ ers ity of Roch es ter, C omp u ter S cience Dep art-
ment, Roch es ter, NY.
[Ros ea and Bal l ard , 1994b] Ros ea, J. P. and Bal l ard , D. H. (1994b).
Learning by ad ap ting rep res entations in genetic p rogramming. I n
Proceedin gs of the 1994 IEEE World Con gress on Computation al
In telligen ce, Orlan do, FL, O rl and o, FL. I E E E Pres s , New York.
[Ros e, 1994] Ros e, A . (1994). Determining th e intron s equ ences re-
qu ired to enh ance gene exp res s ion. S u mmary of Pres entation 1-25,
Univ ers ity of C al if ornia at Dav is , Mol ecu l ar and C el l u l ar Biol ogy,
Univ ers ity of C al if ornia at Dav is , C A .
[Ros s et al ., 1996] Ros s , S . J., Daid a, J. M., Doan, C . M., Bers ano-
Begey, T. F., and McC l ain, J. J. (1996). Variations in ev ol u tion of
s u bs u mp tion arch itectu res u s ing genetic p rogramming: Th e wal l
f ol l owing robot rev is ited . I n Koza, J. R., Gol d berg, D. E ., Fogel ,
D. B., and Riol o, R. L., ed itors , Gen etic Programmin g 1996: Pro-
ceedin gs of the First A n n ual Con feren ce, p ages 191-199, S tanf ord
Univ ers ity, C A . MI T Pres s , C ambrid ge, MA .
[Ros t and S and er, 1993] Ros t, B. and S and er, C . (1993). Pred iction
of p rotein s econd ary s tru ctu re at better th an 70% accu racy. J.
Mol. Biol, 232:584-599.
[Ru s h et al ., 1994] Ru s h , J. R., Fras er, A . P., and Barnes , D. P.
(1994). E v ol v ing co-op eration in au tonomou s robotic s ys tems .
I n Proceedin gs of the IEE In tern ation al Con feren ce on Con trol,
March 21-24, 1994, Lond on. I E E , Lond on, UK.
[Ryan, 1994] Ryan, C . (1994). Pygmies and civ il s erv ants . I n Kin-
near, Jr., K. E ., ed itor, A dvan ces in Gen etic Programmin g, ch ap -
ter 11, p ages 243-263. MI T Pres s , C ambrid ge, MA .
[Ryan and Wal s h , 1997] Ryan, C . and Wal s h , P. (1997). Th e ev o-
l u tion of p rov abl e p aral l el p rograms . I n Koza, J. R., Deb, K.,
Dorigo, M., Fogel , D. B., Garzon, M., I ba, H., and Riol o, R. L.,
ed itors , Gen etic Programmin g 1997: Proceedin gs of the Secon d A n -
n ual Con feren ce, p ages 295-302, S tanf ord Univ ers ity, C A . Morgan
Kau f mann, S an Francis co, C A .
[Ryu and E ick, 1996] Ryu , T.-W. and E ick, C . F. (1996). MA S S O N:
d is cov ering commonal ties in col l ection of objects u s ing genetic p ro-
gramming. I n Koza, J. R., Gol d berg, D. E ., Fogel , D. B., and Riol o,
R. L., ed itors , Gen etic Programmin g 1996: Proceedin gs of the First
A n n ual Con feren ce, p ages 200-208, S tanf ord Univ ers ity, C A . MI T
Pres s , C ambrid ge, MA .
[S amu el , 1963] S amu el , A . (1963). S one s tu d ies in mach ine l earning
u s ing th e game of ch eckers . I n Feigenbau m, E . and Fel d man, J.,
ed itors , Computers an d Thought. McGraw-Hil l , New York.
[S ankof f and Kru s kal , 1983] S ankof f , S. and Kru s kal , J. (1983). Time
Warps, Strin g Edits an d Macromokcules: The Theory an d Prac-
tice of Sequen ce Comparison . A d d is on-Wes l ey, Read ing, MA .
[S ch oenau er et al ., 1995] S ch oenau er, M., Lamy, B., and Jou v e, F.
(1995). I d entif ication of mech anical beh av iou r by genetic p rogram-
ming p art I I : E nergy f ormu l ation. Tech nical rep ort, E col e Pol y-
tech niqu e, 91128 Pal ais eau , France.
[S ch oenau er et al ., 1996] S ch oenau er, M., S ebag, M., Jou v e, F.,
Lamy, B., and Maitou rnam, H. (1996). E v ol u tionary id entif ication
of macro-mech anical mod el s . I n A rgel ine, P. J. and Kinnear, Jr.,
K. E ., ed itors , A dvan ces in Gen etic Programmin g 2, ch ap ter 23,
p ages 467-488. MI T Pres s , C ambrid ge, MA .
[S ch wef el , 1995] S ch wef el , H.-P. (1995). Evolution an d Optimum
Seekin g. S ixth -Generation C omp u ter Tech nol ogy S eries . Joh n Wi-
l ey & S ons , New York.
[S ch wef el and Ru d ol p h , 1995] S ch wef el , H.-P. and Ru d ol p h , G.
(1995). C ontemp orary ev ol u tion s trategies . I n A dvan ces in A r-
tificial Life, p ages 893-907. S p ringer-Verl ag, Berl in.
[S ed gewick, 1992] S ed gewick, R. (1992). A lgorithms in Pascal.
A d d is on-Wes l ey, Read ing, MA .
[S egov ia and I s as i, 1997] S egov ia, J. and I s as i, P. (1997). Genetic
p rogramming f or d es igning ad h oc neu ral network l earning ru l es .
I n Koza, J. R., Deb, K., Dorigo, M., Fogel , D. B., Garzon, M.,
I ba, H., and Riol o, R. L., ed itors , Gen etic Programmin g 1997:
Proceedin gs of the Secon d A n n ual Con feren ce, p age 303, S tanf ord
Univ ers ity, C A . Morgan Kau f rnann, S an Francis co, C A .
[S h arman and E s p arcia-A l cazar, 1993] S h arman, K. C . and
E s p arcia-A l cazar, A . I . (1993). Genetic ev ol u tion of s ym-
bol ic s ignal mod el s . I n Proceedin gs of the Secon d In tern ation al
Con feren ce on Natural A lgorithms in Sign al Processin g, NA SP'93,
E s s ex Univ ers ity.
[S h errah et al ., 1997] S h errah , J. R., Bogner, R. E ., and Bou zer-
d ou m, A . (1997). Th e ev ol u tionary p re-p roces s or: A u tomatic f ea-
tu re extraction f or s u p erv is ed cl as s if ication u s ing genetic p rogram-
ming. I n Koza, J. R., Deb, K., Dorigo, M., Fogel , D. B., Gar-
zon, M., I ba, H., and Riol o, R. L., ed itors , Gen etic Programmin g
1997: Proceedin gs of the Secon d A n n ual Con feren ce, p ages 304-
312, S tanf ord Univ ers ity, C A . Morgan Kau f mann, S an Francis co,
C A .
[S iegel , 1994] S iegel , E . V. (1994). C omp etitiv el y ev ol v ing d ecis ion
trees agains t f ixed training cas es f or natu ral l angu age p roces s ing.
I n Kinnear, Jr., K. E ., ed itor, A dvan ces in Gen etic Programmin g,
ch ap ter 19, p ages 409-423. MI T Pres s , C ambrid ge, MA .
[S ims , 1991a] S ims , K. (1991a). A rtif icial ev ol u tion f or comp u ter
grap h ics . Tech nical Rep ort TR-185, Th inking Mach ines C orp o-
ration, C A .
[S ims , 1991b] S ims , K. (1991b). A rtif icial ev ol u tion f or comp u ter
grap h ics . A CM Computer Graphics, 25(4):319-328. S I GGRA PH
'91 Proceed ings .
[S ims , 1992a] S ims , K. (1992a). I nteractiv e ev ol u tion of d ynamical
s ys tems . I n Varel a, F. J. and Bou rgine, P., ed itors , Toward a
Practice of A uton omous Systems: Proceedin gs of the First Euro-
pean Con feren ce on A rtificial Life, p ages 171-178, Paris , France.
MI T Pres s , C ambrid ge, MA .
[S ims , 1992b] S ims , K. (1992b). I nteractiv e ev ol u tion of equ ations
f or p roced u ral mod el s . I n Proceedin gs of IMA GINA con feren ce,
Monte C arl o, Janu ary 29-31, 1992.
[S ims , 1993a] S ims , K. (1993a). E v ol v ing images . Lectu re. Pres ented
at C entre George Pomp id ou , Paris on March 4, 1993.
[S ims , 1993b] S ims , K. (1993b). I nteractiv e ev ol u tion of equ ations
f or p roced u ral mod el s . The Visual Computer, 9:466-476.
[S ims , 1994] S ims , K. (1994). E v ol v ing 3D morp h ol ogy and beh av ior
by comp etition. I n Brooks , R. and Maes , P., ed itors , Proc. A rtifi-
cial Life IV, p ages 28-39, C ambrid ge, MA . MI T Pres s , C ambrid ge,
MA .
[S mith , 1996] S mith , P. (1996). C onju gation - A bacterial l y ins p ired
f orm of genetic recombination. I n Koza, J. R., ed itor, Late Breakin g
Papers at the Gen etic Programmin g 1996 Con feren ce, p ages 167-
176, S tanf ord Univ ers ity, C A . S tanf ord Books tore, S tanf ord , C A .
[S mith , 1980] S mith , S . F. (1980). A Learn in g System Based on Ge-
n etic A daptive A lgorithms. Univ ers ity of Pitts bu rgh .
[S ou l e and Fos ter, 1997a] S ou l e, T. and Fos ter, J. (1997a). C od e s ize
and d ep th f l ows in genetic p rogramming. I n Koza, J., Deb, K.,
Dorigo, M., Fogel , D., Garzon, M., I ba, H., and Riol o, R., ed i-
tors , Gen etic Programmin g 1997: Proceedin gs of the Secon d A n -
n ual Con feren ce, Ju l y 13-16, 1997, p ages 313-320, S tanf ord Uni-
v ers ity, S tanf ord , C A . Morgan Kau f mann, S an Francis co, C A .
[S ou l e and Fos ter, 1997b] S ou l e, T. and Fos ter, J. A . (1997b). C od e
s ize and d ep th f l ows in genetic p rogramming. I n Koza, J. R., Deb,
K., Dorigo, M., Fogel , D. B., Garzon, M., I ba, H., and Riol o,
R. L., ed itors , Gen etic Programmin g 1997: Proceedin gs of the Sec-
on d A n n ual Con feren ce, p ages 313-320, S tanf ord Univ ers ity, S tan-
f ord , C A . Morgan Kau f mann, S an Francis co, C A .
[S ou l e et al ., 1996] S ou l e, T., Fos ter, J. A ., and Dickins on, J. (1996).
C od e growth in genetic p rogramming. I n Koza, J. R., Gol d berg,
D. E ., Fogel , D. B., and Riol o, R. L., ed itors , Gen etic Programmin g
1996: Proceedin gs of the First A n n ual Con feren ce, p ages 215-223,
S tanf ord Univ ers ity, C A . MI T Pres s , C ambrid ge, MA .
[S p ech t, 1990] S p ech t, D. (1990). Probabil is tic neu ral networks . Neu-
ral Networks, 3:109-118.
[S p ech t, 1991] S p ech t, D. (1991). A general regres s ion neu ral net-
work. IEEE Tran saction s on Neural Networks, 2:568-576.
[S p ector, 1994] S p ector, L. (1994). Genetic p rogramming and A I
p l anning s ys tems . I n Proceedin gs of Twelfth Nation al Con fer-
en ce on A rtificial In telligen ce, S eattl e, WA . A A A I , Menl o Park,
C A /MI T Pres s , C ambrid ge, MA .
[S p ector, 1996] S p ector, L. (1996). S imu l taneou s ev ol u tion of p ro-
grams and th eir control s tru ctu res . I n A ngel ine, P. J. and Kinnear,
Jr., K. E ., ed itors , A dvan ces in Gen etic Programmin g 2, ch ap ter 7,
p ages 137-154. MI T Pres s , C ambrid ge, MA .
[S p ector and A l p ern, 1994] S p ector, L. and A l p ern, A . (1994). C rit-
icis m, cu l tu re, and th e au tomatic generation of artworks . I n Pro-
ceedin gs of Twelfth Nation al Con feren ce on A rtificial In telligen ce,
p ages 3-8, S eattl e, WA . A A A I , Menl o Park, C A /MI T Pres s , C am-
brid ge, MA .
[S p ector and A l p ern, 1995] S p ector, L. and A l p ern, A . (1995). I n-
d u ction and recap itu l ation of d eep mu s ical s tru ctu re. I n Proceed-
in gs of In tern ation al Join t Con feren ce on A rtificial In telligen ce,
IJCA I'95 Workshop on Music an d A I, Montreal , Qu ebec, C anad a.
[S p ector and Lu ke, 1996a] S p ector, L. and Lu ke, S . (1996a). C u l -
tu ral trans mis s ion of inf ormation in genetic p rogramming. I n Koza,
J. R., Gol d berg, D. E ., Fogel , D. B., and Riol o, R. L., ed itors , Ge-
n etic Programmin g 1996: Proceedin gs of the First A n n ual Con fer-
en ce, p ages 209-214, S tanf ord Univ ers ity, C A . MI T Pres s , C am-
brid ge, MA .
[S p ector and Lu ke, 1996b] S p ector, L. and Lu ke, S . (1996b). C u l tu re
enh ances th e ev ol v abil ity of cognition. I n C ottrel l , G., ed itor, Pro-
ceedin gs of the Eighteen th A n n ual Con feren ce of the Cogn itive Sci-
en ce Society, p ages 672-677. Lawrence E rl bau m A s s ociates , Mah -
wah , NJ.
[S p ector and S tof f el , 1996a] S p ector, L. and S tof f el , K. (1996a). A u -
tomatic generation of ad ap tiv e p rograms . I n Maes , P., Mataric,
M. J., Meyer, J.-A ., Pol l ack, J., and Wil s on, S . W., ed itors , Pro-
ceedin gs of the Fourth In tern ation al Con feren ce on Simulation of
A daptive Behavior: From A n imals to A n imats 4, p ages 476-483,
C ap e C od e. MI T Pres s , C ambrid ge, MA .
[S p ector and S tof f el , 1996b] S p ector, L. and S tof f el , K. (1996b). O n-
togenetic p rogramming. I n Koza, J. R., Gol d berg, D. E ., Fogel ,
D. B., and Riol o, R. L., ed itors , Gen etic Programmin g 1996: Pro-
ceedin gs of the First A n n ual Con feren ce, p ages 394-399, S tanf ord
Univ ers ity, C A . MI T Pres s , C ambrid ge, MA .
[S p encer, 1993] S p encer, G. F. (1993). A u tomatic generation of p ro-
grams f or crawl ing and wal king. I n Forres t, S ., ed itor, Proceedin gs
of the 5th In tern ation al Con feren ce on Gen etic A lgorithms, ICGA -
93, p age 654, Univ ers ity of I l l inois at Urbana-C h amp aign. Morgan
Kau f mann, S an Francis co, C A .
[S p encer, 1994] S p encer, G. F. (1994). A u tomatic generation of p ro-
grams f or crawl ing and wal king. I n Kinnear, Jr., K. E ., ed itor, A d-
van ces in Gen etic Programmin g, ch ap ter 15, p ages 335-353. MI T
Pres s , C ambrid ge, MA .
[S tans if er, 1995] S tans if er, R. (1995). The Study of Programmin g
Lan guages. Prentice Hal l , E ngl ewood C l if f s , NJ.
[S til l ger and S p il iop ou l ou , 1996] S til l ger, M. and S p il iop ou l ou , M.
(1996). Genetic p rogramming in d atabas e qu ery op timization. I n
Koza, J. R., Gol d berg, D. E ., Fogel , D. B., and Riol o, R. L., ed i-
tors , Gen etic Programmin g 1996: Proceedin gs of the First A n n ual
Con feren ce, p ages 388-393, S tanf ord Univ ers ity, C A . MI T Pres s ,
C ambrid ge, MA .
[S tof f el and S p ector, 1996] S tof f el , K. and S p ector, L. (1996). High -
p erf ormance, p aral l el , s tack-bas ed genetic p rogramming. I n Koza,
J. R., Gol d berg, D. E ., Fogel , D. B., and Riol o, R. L., ed itors ,
Gen etic Programmin g 1996: Proceedin gs of the First A n n ual Con -
feren ce, p ages 224-229, S tanf ord Univ ers ity, C A . MI T Pres s , C am-
brid ge, MA .
[Tackett, 1993] Tackett, W. A . (1993). Genetic p rogramming f or f ea-
tu re d is cov ery and image d is crimination. I n Forres t, S ., ed itor,
Proceedin gs of the 5th In tern ation al Con feren ce on Gen etic A lgo-
rithms, ICGA -93, p ages 303-309, Univ ers ity of I l l inois at Urbana-
C h amp aign. Morgan Kau f mann, S an Francis co, C A .
[Tackett, 1994] Tackett, W. A . (1994). Recombin ation , Selection , an d
the Gen etic Con struction of Computer Programs. Ph D th es is , Uni-
v ers ity of S ou th ern C al if ornia, Dep artment of E l ectrical E ngineer-
ing S ys tems .
[Tackett, 1995] Tackett, W. A . (1995). Mining th e genetic p rogram.
IEEE Expert, 10(3):28-38.
[Tackett and C armi, 1994] Tackett, W. A . and C armi, A . (1994).
Th e d onu t p robl em: S cal abil ity and general ization in genetic p ro-
gramming. I n Kinnear, Jr., K. E ., ed itor, A dvan ces in Gen etic
Programmin g, ch ap ter 7, p ages 143-176. MI T Pres s , C ambrid ge,
MA .
[Tayl or, 1995] Tayl or, S . N. (1995). E v ol u tion by genetic p rogram-
ming of a s p atial robot ju ggl ing control al gorith m. I n Ros ea,
J. P., ed itor, Proceedin gs of the Workshop on Gen etic Program-
min g: From Theory to Real-World A pplication s, p ages 104-110,
Tah oe C ity, C A .
[Tel l er, 1993] Tel l er, A . (1993). Learning mental mod el s . I n Pro-
ceedin gs of the Fifth Workshop on Neural Networks: A n In ter-
n ation al Con feren ce on Computation al In telligen ce: Neural Net-
works, Fuzzy Systems, Evolution ary Programmin g, an d Virtual Re-
ality, S an Francis co, C A .
[Tel l er, 1994a] Tel l er, A . (1994a). Th e ev ol u tion of mental mod el s .
I n Kinnear, Jr., K. E ., ed itor, A dvan ces in Gen etic Programmin g,
ch ap ter 9, p ages 199-219. MI T Pres s , C ambrid ge, MA .
[Tel l er, 1994b] Tel l er, A . (1994b). Genetic p rogramming, ind exed
memory, th e h al ting p robl em, and oth er cu rios ities . I n Proceedin gs
of the 7th an n ual Florida A rtificial In telligen ce Research Sympo-
sium, p ages 270-274, Pens acol a, FL. I E E E Pres s , New York.
[Tel l er, 1994c] Tel l er, A . (1994c). Tu ring comp l etenes s in th e l an-
gu age of genetic p rogramming with ind exed memory. I n Proceed-
in gs of the 1994 IEEE World Con gress on Computation al In telli-
gen ce, v ol u me 1, p ages 136-141, O rl and o, FL. I E E E Pres s , New
York.
[Tel l er, 1996] Tel l er, A . (1996). E v ol v ing p rogrammers : Th e co-
ev ol u tion of intel l igent recombination op erators . I n A ngel ine, P. J.
and Kinnear, Jr., K. E ., ed itors , A dvan ces in Gen etic Programmin g
2, ch ap ter 3, p ages 45-68. MI T Pres s , C ambrid ge, MA .
[Tel l er and Vel os o, 1995a] Tel l er, A . and Vel os o, M. (1995a). A con-
trol l ed exp eriment: E v ol u tion f or l earning d if f icu l t image cl as s if ica-
tion. I n Seven th Portuguese Con feren ce On A rtificial In telligen ce,
v ol u me 990 of Lecture Notes in Computer Scien ce, p ages 165-176,
Fu nch al , Mad eira I s l and , Portu gal . S p ringer-Verl ag, Berl in, Ger-
many.
[Tel l er and Vel os o, 1995b] Tel l er, A . and Vel os o, M. (1995b). PA DO :
Learning tree s tru ctu red al gorith ms f or orch es tration into an ob-
ject recognition s ys tem. Tech nical Rep ort C MU-C S -95-101, De-
p artment of C omp u ter S cience, C arnegie Mel l on Univ ers ity, Pitts -
bu rgh , PA .
[Tel l er and Vel os o, 1995c] Tel l er, A . and Vel os o, M. (1995c). Pro-
gram ev ol u tion f or d ata mining. The In tern ation al Journ al of Ex-
pert Systems, 8(3):216-236.
[Tel l er and Vel os o, 1996] Tel l er, A . and Vel os o, M. (1996). PA DO :
A new l earning arch itectu re f or object recognition. I n I keu ch i, K.
and Vel os o, M., ed itors , Symbolic Visual Learn in g, p ages 81-116.
O xf ord Univ ers ity Pres s , O xf ord , UK.
[Th ed ens , 1994] Th ed ens , D. R. (1994). Detector d es ign by genetic
p rogramming f or au tomated bord er d ef inition in card iac magnetic
res onance images . I n Koza, J. R-, ed itor, Gen etic A lgorithms at
Stan ford 1994, p ages 170-179. S tanf ord Books tore, S tanf ord , C A .
[Tu erk and Gol d , 1990] Tu erk, C . and Gol d , L. (1990). S ys tematic
ev ol u tion of l igand s by exp onential enrich ment. Scien ce, 249:505-
510.
[Tu ring, 1936] Tu ring, A . M. (1936). O n comp u tabl e nu mbers , with
an ap p l ication to th e E nts ch eid u ngs p robl em. Proc. Lon don Math.
Soc, 42:230-265.
[Veach , 1996] Veach , M. S . (1996). Recognition and recons tru ction
of v is ibil ity grap h s u s ing a genetic al gorith m. I n Koza, J. R., Gol d -
berg, D. E ., Fogel , D. B., and Riol o, R. L., ed itors , Gen etic Pro-
grammin g 1996: Proceedin gs of the First A n n ual Con feren ce, p ages
491-498, S tanf ord Univ ers ity, C A . MI T Pres s , C ambrid ge, MA .
[v on Neu mann and Morgens tern, 1944] v on Neu mann, J. and Mor-
gens tern, O . (1944). Theory of Games an d Econ omic Behavior.
Princeton Univ ers ity Pres s , Princeton, NJ.
[Wal ker et al ., 1995] Wal ker, R. F., Haas d ijk, E . W., and Gerrets ,
M. C . (1995). C red it ev al u ation u s ing a genetic al gorith m. I n
Goonatil ake, S . and Trel eav en, P., ed itors , In telligen t Systems for
Fin an ce an d Busin ess, ch ap ter 3, p ages 39-59. Joh n Wil ey & S ons ,
New York.
[Wal s h and Ryan, 1996] Wal s h , P. and Ryan, C . (1996). Paragen: A
nov el tech niqu e f or th e au top aral l el is ation of s equ ential p rograms
u s ing genetic p rogramming. I n Koza, J. R., Gol d berg, D. E ., Fogel ,
D. B., and Riol o, R. L., ed itors , Gen etic Programmin g 1996: Pro-
ceedin gs of the First A n n ual Con feren ce, p ages 406-409, S tanf ord
Univ ers ity, C A . MI T Pres s , C ambrid ge, MA .
[Wats on et al ., 1987] Wats on, J. D., Hop kins , N. H., Roberts , J. W.,
S teitz, J. A ., and Weiner, A . M. (1987). Molecular Biology of the
Gen e. Benjamin-C u mmings , Menl o Park, C A .
[Wh igh am, 1995a] Wh igh am, P. A . (1995a). Grammatical l y-bas ed
genetic p rogramming. I n Ros ea, J. P., ed itor, Proceedin gs of the
Workshop on Gen etic Programmin g: From Theory to Real-World
A pplication s, p ages 33-41, Tah oe C ity, C A .
[Wh igh am, 1995b] Wh igh am, P. A . (1995b). I nd u ctiv e bias and ge-
netic p rogramming. I n Zal zal a, A . M. S ., ed itor, First In tern ation al
Con feren ce on Gen etic A lgorithms in En gin eerin g Systems: In n o-
vation s an d A pplication s, GA LESIA , v ol u me 414, p ages 461-466,
S h ef f iel d , UK. I E E , Lond on, UK.
[Wh igh am, 1995c] Wh igh am, P. A . (1995c). A s ch ema th eorem f or
context-f ree grammars . I n 1995 IEEE Con feren ce on Evolution ary
Computation , v ol u me 1, p ages 178-181, Perth, A u s tral ia. I E E E
Pres s , New York.
[Wh igh am and McKay, 1995] Wh igh am, P. A . and McKay, R. I .
(1995). Genetic ap p roach es to l earning recu rs iv e rel ations . I n
Yao, X., ed itor, Progress in Evolution ary Computation , v ol u me 956
of Lecture Notes in A rtificial In telligen ce, p ages 17-27. S p ringer-
Verl ag, Berl in, Germany.
[Wh ite and S of ge, 1992] Wh ite, D. and S of ge, D. E . (1992). Han d-
book of In telligen t Con trol. Neural, Fuzzy an d A daptive A p-
proaches. Van Nos trand Reinh ol d , New York.
[Wh itl ey, 1989] Wh itl ey, D. (1989). Th e genitor al gorith m and s el ec-
tion p res s u re: Wh y rank-bas ed al l ocation of rep rod u ctiv e trial s is
bes t. I n S ch af f er, J. D., ed itor, Proc. 3rd In t. Con feren ce on Gen e-
tic A lgorithms, p ages 116-121, S an Mateo, C A . Morgan Kau f mann,
S an Francis co, C A .
[Wil h el ms , 1990] Wil h el ms , J. (1990). Dynamics f or comp u ter grap h -
ics : A tu torial . I n A CM Siggraph'90 Course Notes, ch ap ter 8, p ages
85-115. Dal l as C onv ention C enter, TX.
[Wineberg and O p p ach er, 1994] Wineberg, M. and O p p ach er, F.
(1994). A rep res entation s ch eme to p erf orm p rogram ind u ction
in a canonical genetic al gorith m. I n Dav id or, Y., S ch wef el , H.-
P., and M R., ed itors , Parallel Problem Solvin g from Nature III,
v ol u me 866 of Lecture Notes in Computer Scien ce.
[Wineberg and O p p ach er, 1996] Wineberg, M. and O p p ach er, F.
(1996). Th e benef its of comp u ting with introns . I n Koza, J. R.,
Gol d berg, D. E ., Fogel , D. B., and Riol o, R. L., ed itors , Gen etic
Programmin g 1996: Proceedin gs of the First A n n ual Con feren ce,
p ages 410-415, S tanf ord Univ ers ity, C A . MI T Pres s , C ambrid ge,
MA .
[Winkel er and Manju nath , 1997] Winkel er, J. F. and Manju nath ,
B. S . (1997). Genetic p rogramming f or object d etection. I n Koza,
J. R., Deb, K., Dorigo, M., Fogel , D. B., Garzon, M., I ba, H., and
Riol o, R. L., ed itors , Gen etic Programmin g 1997: Proceedin gs of
the Secon d A n n ual Con feren ce, p ages 330-335, S tanf ord Univ er-
s ity, C A . Morgan Kau f mann, S an Francis co, C A .
[Wong and Leu ng, 1996] Wong, M. L. and Leu ng, K. S . (1996).
E v ol v ing recu rs iv e f u nctions f or th e ev en-p arity p robl em u s ing ge-
netic p rogramming. I n A ngel ine, P. J. and Kinnear, Jr., K. E .,
ed itors , A dvan ces in Gen etic Programmin g 2, ch ap ter 11, p ages
221-240. MI T Pres s , C ambrid ge, MA .
[You rd on and C ons tantine, 1979] You rd on, E . and C ons tantine, L.
(1979). Structured Design : Fun damen tals of a Disciplin e of Com-
puter Program an d Systems Design . Prentice Hal l , E ngl ewood
C l if f s , NJ.
[Zannoni and Reynol d s , 1996] Zannoni, E . and Reynol d s , R. (1996).
E xtracting d es ign knowl ed ge f rom genetic p rograms u s ing cu l tu ral
al gorith ms . I n Fogel , L., A ngel ine, P., and Back, T., ed itors , Pro-
ceedin gs of the Fifth Evolution ary Programmin g Con feren ce, San
Diego, CA , 1996, C ambrid ge, MA . MI T Pres s , C ambrid ge, MA .
[Zh ang et al ., 1996] Zh ang, B.-T., Kwak, J.-H., and Lee, C .-H.
(1996). Bu il d ing s of tware agents f or inf ormation f il tering on th e
internet: A genetic p rogramming ap p roach . I n Koza, J. R., ed i-
tor, Late Breakin g Papers at the Gen etic Programmin g 1996 Con -
feren ce, p age 196, S tanf ord Univ ers ity, C A . S tanf ord Books tore,
S tanf ord , C A .
[Zh ang and Mu eh l enbein, 1994] Zh ang, B.-T. and Mu eh l enbein, H.
(1994). S ynth es is of s igma-p i neu ral networks by th e breed er ge-
netic p rogramming. I n Proceedin gs of IEEE In tern ation al Con -
feren ce on Evolution ary Computation (ICEC-94), World Con gress
on Computation al In telligen ce, p ages 318-323, O rl and o, FL. I E E E
C omp u ter S ociety Pres s .
[Zh ang and Mu eh l enbein, 1995] Zh ang, B.-T. and Mu eh l enbein, H.
(1995). Bal ancing accu racy and p ars imony in genetic p rogram-
ming. Evolution ary Computation , 3(l ):17-38.
[Zh ang and Miih l enbein, 1996] Zh ang, B.-T. and Miih l enbein, H.
(1996). A d ap tiv e f itnes s f u nctions f or d ynamic growing/p ru ning of
p rogram trees . I n A ngel ine, P. J. and Kinnear, Jr., K. E ., ed itors ,
A dvan ces in Gen etic Programmin g 2, ch ap ter 12, p ages 241-256.
MI T Pres s , C ambrid ge, MA .
[Zh ao et al ., 1996] Zh ao, J., Kearney, G., and S op er, A . (1996). E mo-
tional exp res s ion cl as s if ication by genetic p rogramming. I n Koza,
J. R., ed itor, Late Breakin g Papers at the Gen etic Programmin g
1996 Con feren ce, p ages 197-202, S tanf ord Univ ers ity, C A . S tan-
f ord Books tore, S tanf ord , C A .
[Zomorod ian, 1995] Zomorod ian, A . (1995). C ontext-f ree l angu age
ind u ction by ev ol u tion of d eterminis tic p u s h -d own au tomata u s ing
genetic p rogramming. I n S iegel , E . V. and Koza, J. R., ed itors ,
Workin g Notes for the A A A l Symposium on Gen etic Programmin g,
p ages 127-133, MI T, C ambrid ge, MA . A A A I , Menl o Park, C A .
Person Index
A C
A l tenberg, L., 28, 144, 156,158,
163, 170
A nd ers on, C , 29
A nd re, D., 187, 188, 196, 208,
280, 370
A ngel ine, P.J., 6, 27, 129, 155,
165, 170, 176, 181-183,
185-187, 196, 198
A s p ray, W., 76
B
Baker, J.E ., 131, 132
Bal l ard , D., 228
Banzh af , W., 11, 22, 46, 79,
114, 118, 151, 152, 155,
156, 160, 164, 182, 188,
206, 209, 222, 225, 228,
250
Barnes , J., 77
Barto, A ., 29
Barton, G., 163
Bayes , T., 20
Bel ad y, L., 59
Bennett, F., 208
Bernou l l i, D., 65
Beyer, H.-G., 99
Bieth ah n, J., 9
Bl ickl e, T., 131
Brav e, S ., 48
Bremermann, H., 90, 91
Bu l mer, M., 132
C acou l l os , T., 20
C amp bel l -Kel l y, M., 76
C el ko, J., 77
C h arif , A ., 79
C l arke, A ., 381
C ramer, N.L., 101
C ray, S ., 75
C row, J., 132
D
D'h aes el eer, P., 162
Darwin, C , 35, 94, 99, 108
Das rath y, 361
Dawkins , R., 179, 296
d eGaris , H., 75, 88, 161, 267
Dick Tracy, 15
Dickins on, J., 101, 182, 188
Dickmanns , D., 101
Du bos s ars ky, E ., 79
Du nh am, B., 7
Du p re, J., 91
E
E h l ers , J., 213
E igen, M., 34, 37, 59, 180
E u l er, L., 368
F
Fel l er, W., 63
Fermat, P., 60
Fl ik, T., 73
Fogel , D., 101
Fogel , L., 100
Fos ter, J., 170, 182, 188
Francone, F.D., 11, 46, 151,153,
156, 164, 182, 188, 206,
209, 222, 225, 228
Fried berg, R., 7, 88, 89, 384
Fried rich , J., 114
Fu jiki, C , 101
G
Gath erol e, C , 160
Gau s s , C ., 65
Gel att, C ., 26
Gerrets , M., 235
Gol d , L., 38
Gol d berg, D., 21, 144
Gref ens tette, J., 131, 132
Gritz, L., 373-375
Gru au , F., 46, 48, 265-267, 372
H
Haas d ijk, E ., 235
Hah n, J.K., 373-375
Haigh , J., 54
Hand l ey, S ., 349
Hans on, N., 229
Heis enberg, W., 90
Hickl in, J., 101
Hid en, H., 163
Hil l is , D., 129, 380
Hinch cl if f e, M., 163
Hirs t, A ., 75
Hol l and , J.H., 95, 97, 98, 101,
131, 144, 145, 189
Hu el s bergen, L., 114
I
I ba, H., 161, 267, 269, 270, 307
J
Jacob, C ., 240, 274
Jerne, N., 34
Joh anns en, W., 45
Jones , T., 154
Ju el s , A ., 154
Ju il l e, H., 304
K
Keith , M.J., 79, 319, 325-327
Kel l er, R.E ., 46, 79, 155, 222,
250
Kernigh an, B., 77
Kimu ra, M., 42, 132
Kinnear, K.E ., 114, 135, 176,
185, 186, 370
Kirkeru d , B., 77
Kirkp atrick, S ., 26
Knu th , D., 61, 62
Koh onen, T., 29
Kol mogorov , A ., 63, 70
Koza, J.R., 5, 21, 24, 25, 46,
54, 59, 79, 88, 101,
102, 108, 119, 120, 131,
144, 146, 180, 181, 204,
208, 209, 214, 217, 220,
240, 274, 279, 287, 288,
311, 316, 336
Kru s kal , J.B., 155, 167
L
Lamas , R., 79
Lang, K., 144, 153, 154
Langd on, W., 102
Langl ey, P., 13, 14, 23, 27
Leh man, M., 59
Leh mer, D., 61
Lem, S ., 4
Lev ens h tein, A ., 221
Li, M., 71, 229
Liebig, H., 73
Lind enmayer, A ., 273
Loh mann, R., 100
Lu ke, S ., 296, 383
M
Miih l enbein, H., 132, 302
Martin, M.C ., 79, 319, 325-327
Mas ters , T., 20, 214
Maynard S mith , J., 35, 37, 46,
49, 51, 185
McKay, B., 163
McPh ee, N.F., 182
Meis el , W., 20
Mich al ewicz, Z., 97
Mitch el l , T., 4
Morgan, J., 77
Morgens tern, O ., 304
Mu l l er, H., 54
N
Nis s en, V., 9
Nord i n, P. , l l , 22, 46, 114, 118,
151, 152, 156, 160, 164,
170, 182,187,188,196,
206, 209, 222, 225, 228,
315
North , J., 7
o
O 'Reil l y, U.-M., 27, 144, 146,
154, 155
O akl ey, E .H.N., 212, 337
O p p ach er, F., 27, 144, 146, 155,
177, 248
O rgel , L., 35, 47
O s born, T., 79
O wens , A ., 100
P
Parzen, E ., 20
Pas cal , B., 60
Pl anck, M., 90
Pol l ack, J.B., 129, 304
Pru s inkiewicz, P., 273
Q
Qu inl an, J., 20
Qu res h i, A ., 102, 383
R
Rao, H., 24
Rao, V., 24
Rech enberg, I ., 98, 132
Reitman, J.S ., 98
Reynol d s , R., 161
Rich ie, D., 77
Ros ea, J.P., 182, 188, 190, 223,
228, 291
Ros s , P., 160
Ru s s el , B., 88
s
S amu el , A ., 4
S ankof f , S ., 155, 167
S ato, T., 267
S ch l ierkamp -Voos en, D., 132
S ch mid h u ber, J., 101
S ch onf el d er, J., 77
S ch wef el , H.-P., 98, 99, 132
S ed gewick, R., 77
S mith , P., 165
S mith , S ., 98, 101
S of ge, D., 9
S ou l e, T., 170, 182, 188
S p ech t, D., 20
S p ector, L., 296, 301, 306
S p encer, G.F., 370
S tanis f er, R., 78
S u tton, R., 29
T
Tackett, W.A ., 28, 158, 182,
218
Tel l er, A ., 22, 68, 116, 124,153,
161,188, 225, 228, 265,
266, 319, 362
Th am, M., 163
Th iel e, L., 131
Tond o, C , 77
Tu erk, C , 38
Tu ring, A ., 67, 88
V
Vecch i, M., 26
Vel os o, M., 116, 161, 265, 266,
362
Vitanyi, P., 71
v on Neu mann, J., 58, 72, 73,
75, 77-79, 82, 304
w
Wad l ow, R.R, 81
Wal ker, R., 235
Wal s h , M., 100
Wats on, J., 41-44, 48, 49, 51,
58
Wattenberg, M., 154
Wh igh am, P., 147, 181, 270
Wh ite, D., 9
Wh itl ey, D., 132
Wil l is , M., 163
Wineberg, M., 177, 187, 248
Winkl h of er, A ., 101
Z
Zannoni, E ., 161
Zh ang, B.-T., 302
Subject Index
accel eration
ru n, 279
acid
amino, 40, 41, 350
d eoxyribonu cl eic, 39
ribonu cl eic, 35-37
acqu is ition
mod u l e, 286, 289, 290
activ ation
bl ock, 227, 291
ad ap tation
s elf , 99, 101
ad d ition
gene, 163
ad enine, 40
A DF, 274, 286, 287
A DS N, 357
agent
artif icial , 374
s of tware
au tonomou s , 358
A I MGP, 114, 120, 228, 332
A I MGP
bu f f er in, 333
cros s ov er in, 334
f ooter in, 333
f u nction bod y in, 333
h ead er in, 333
mu tation in, 334
retu rn ins tru ction in, 333
al gorith m, 341
al gorith m
bas ic, 278
ev ol u tionary, 88
ev ol u tionary
bas ic, 89, 92
genetic, 95, 343, 347
GP
generational , 134
s tead y s tate, 134
I D3, 20
l earning, 12
l ogic network
ad ap tiv e, 307
s earch , 384
s earch
general -p u rp os e, 305
s p ecial -p u rp os e, 306
S E LE X, 384
al l el e, 43
al l ocation
memory, 320
A LN, 307
anal ys is , 209
anal ys is
comp onents
p rincip al , 210
d ata
onl ine, 219
animation
f igu re, 373
anneal ing
s imu l ated , 26
s imu l ated
mu tate-, 154
ap p l ication, 240
ap p l ication
commercial , 383
control , 363
f inancial , 341
real -worl d , 8
ap p roach
d ev el op mental , 266
ev ol u tionary
co-, 266
genetic p rogramming, 300
genetic p rogramming
d ev el op mental , 300
h ybrid , 305
arc, 265
argu ment
f u nction, 271
arity, 109
array, 81, 320, 324, 326-328
array
generic, 320
art, 341
av erage
mov ing
exp onential , 212
s imp l e, 212
av oid ing
obs tacl e, 343
axis
bod y, 368
eigen, 368, 369
B
backgrou nd
biol ogical , 380
comp u ter s cience, 380
math ematics , 380
backp rop agation, 27
bal ance
cros s ov er/mu tation, 337
banking
gene, 219
bas e p air, 34, 37, 39, 40
bas e p air
DNA , 40
beam, 27
beh av ior, 382
beh av ior
ad ap tiv e, 387
correct, 281
non-l inear, 337, 381
p rogram, 301
bench marking, 208
BGP, 250
bias , 154
bibl iograp h y
genetic p rogramming, 389
biotech nol ogy, 341
bl oat, 181, 195
bl ock
activ ation of, 227
bu il d ing, 144, 145, 148-150,
157, 160-162, 164, 165,
170, 171, 283
s al ient, 228, 291
Boots trap , 235
box
bl ack, 267
branch
axiom, 274
cond itional , 362
d ef inition
A DF, 285
f u nction-d ef ining, 284
res u l t-p rod u cing, 284, 285
branch ing
cond itional
"wet", 44
brid ge comp onent, 382
brood s ize, 159
c
C , 254, 284, 315, 319, 333
cal cu l u s
l ambd a, 78
cand id ate
s ol u tion, 89, 92, 101
card inal ity, 21
carrier
f u nction, 300
cas e
f itnes s , 127, 256, 264, 278,
280, 311, 331, 369
training, 10, 336
cau s al ity, 99
ceil ing
time
aggregate comp u tation,
294
cel l
network
artif icial neu ral , 355
C GPS , 114
ch ange
f itnes s , 151
s mal l , 249
ch ecking
intron, 206
typ e, 298
ch romos ome, 92
ch romos ome
DNA , 44
ch u nk, 303
ch u nking, 303
circu itry, 357
cl as s
res u l t, 10
cl as s if ication, 345
cl as s if ication
Bayes /Parzen, 20
image, 362
cl as s if ier
K-neares t neigh bor, 19
cl imbing
h il l , 9, 26, 154
h il l
cros s ov er-, 154
p aral l el , 24
cl os u re, 112, 278
cl u s tering, 342
cod e
C
compiled, 315
cel l u l ar, 355
ef f ectiv e, 293
f reezing of, 292
genetic, 253, 255
mach ine, 259, 280, 313, 317,
333
mach ine
au tomatic ind u ction of
. . . with genetic p ro-
gramming, 332
nativ e, 315
p rop ortion of, 361
p s eu d o-, 328
u s ef u l , 288
cod on, 40, 251, 255
coef f icient
binomial , 61
correl ation, 207
col l ection
garbage, 314
combination, 60
commu nication
inter-agent, 358
inter-l eg, 371
comp l etenes s
Tu ring, 68
comp l exity, 39, 188, 387
comp l exity
abs ol u te, 188
al gorith mic, 70
ef f ectiv e, 188, 197
env ironmental , 283
Kol mogorov , 70
Kol mogorov -C h aitin, 70
p rogram, 70
comp onent
brid ge, 382
comp res s ion, 227, 289
comp res s ion
image
p rogrammatic, 303
comp u tation
ev ol u tionary, 387
ev ol u tionary
general , 390
comp u ting, 341
conju gation, 165
conju gation
. . . f or GA , 165
Hf r, 49
cons erv ation, 93
cons tant, 110, 112, 260, 264
cons tant
rand om ep h emeral , 110
cons tru ctor, 79
cons tru ctor
s et
f u nction, 82
cons u mp tion
memory, 260
control
agent, 341
general , 341
p roces s , 341
real -time, 371
robot, 341, 364
s p acecraf t, 341
controv ers y
cros s ov er, 144
conv ergence, 278
correl ation
cas cad e, 27
cos tu mer
regu l ar, 298
cou nting
intron, 226
criterion
termination
earl y, 279
cros s ov er, 24, 94-96, 144, 154,
170, 194, 241, 242, 263,
269, 272, 292, 299, 320,
321, 323, 330, 334, 357,
370, 371, 382
cros s ov er
biol ogical , 156
comp l ex, 320
cons tru ctiv e, 149, 153, 225
context p res erv ing, 242
d ef l ecting, 334
d es tru ctiv e, 153, 195, 225,
336, 381
d if f icu l ties of, 148
ef f ect of, 151
ef f ect of
meas u ring th e, 151
negativ e, 153
GE MS , 263
genetic al gorith m, 261
genetic p rogramming, 157
grap h , 124
h ead l es s ch icken, 153, 154
h omol ogou s , 144
imp rov ement of, 156
ins tru ction, 334
intel l igent, 161
intergene, 163
l inear, 123
mod u l e, 242
neu tral , 152, 153, 225
p oint
n-, 94
one-, 94, 96
two-, 94
p os tf ix, 326
p ref ix, 328
p res erv ing
s trong context, 162
s elf , 242
s mart, 162
s tru ctu ral p rotection agains t,
198
s u btree exch ange, 242
trad itional genetic p rogram-
ming
macromu tation emu l ated
by, 155
tree-bas ed , 122
cu l tu re, 296
cu s tomer, 298
cu s tomer
av erage, 298
cybernetics
biol ogical , 387
cycl e
p roces s or, 314
cytos ine, 40
D
d ata
au d it
s ys tem, 358
f il tered , 213
nois y
ov erf itting of, 230
s h ort-term, 324
d ef ens e
s ys tem
comp u ter, 358
d ep th
maximu m, 118
nod e, 118
d es ign
al gorith m, 351
circu it, 344
circu it
el ectrical , 372
el ectrical circu it
au tomatic, 371
d etection
core
p rotein, 342
d etector
intru s ion, 358
d eterminis m
non-, 274
d ev ice
p rogrammabl e-l ogic, 357
DGP, 250, 251, 253, 255
DGPC , 370
d imens ional ity
cu rs e of, 26
d is tance
ed it, 221
d is tribu tion
binomial , 65
Gau s s ian, 65
l og-normal , 66
normal , 65
p robabil ity, 64
s p atial , 347
d iv ers ity, 220, 278
d iv ers ity
genotyp ic, 221
p h enotyp ic, 221
d iv is ion, 267
d iv is ion
p rotected , 112
DNA , 39
DNA
h u man, 39
ju nk, 43, 45
non-cod ing, 45
d omain
ap p l ication, 341
l earning, 10
l earning
f eatu res of, 10
s ep arabl e
l inearl y, 16
time, 214
d onor, 165
d u p l ication
gene, 288
d ynamics
ru n, 381
E . col i, 53, 54
E A , 88
ed ge, 21, 81
E DI , 196
ed iting, 254
ef f ect
cros s ov er, 224
op erator, 224
ef f ort
comp u tational , 298
p roces s ing, 217
encap s u l ation, 283, 288, 292
encod ing
cel l u l ar, 266
d ata, 342
engineering
el ectrical , 341
enrich ment
exp onential
s ys tematic ev ol u tion of
l igand s by, 38
entrop y, 59, 223
env ironment, 283
env ironment
u nknown, 281
enzyme, 43
E PI , 248
ep is tas is , 94
ep och , 273, 291
equ ation
s ymbol ic, 262
error
bu s , 334
s amp l ing, 207, 234
tes ting
in-s amp l e, 232
E ru nticLab, 383
E S , 98
E v al NextA rg, 327
ev al u ation, 9
ev al u ation
f itnes s , 129, 254, 330
f itnes s
p aral l el , 280
grap h
acycl ic, 342
p os tf ix, 326
ev ent, 63
ev ent
el ementary, 63
ev ol u tion, 35, 39
ev ol u tion
. . . i n C , 254
biol ogical , 47
co-, 129, 303
co-
comp etitiv e, 305
coop erativ e, 305
cod e
mach ine, 263, 280
ef f ectiv e, 336
gl eaning recip e f rom, 91
h ard ware, 357, 383
interactiv e, 341
natu ral , 34
op erator, 383
p rogram, 240
rep res entation, 177
s tru ctu re, 382
s ys tematic
. . . of l igand s by exp o-
nential enrich ment, 38
examp l e
real -worl d , 206
exch ange
genetic, 50, 89
genetic
h omol ogou s , 50
h omol ogou s , 50
h omol ogou s
non-, 52
execu tion
cond itional , 292
time-bou nd ed , 294
exon, 44, 227
exp ans ion, 289
exp erience, 4
exp eriment
in vitro, 35, 47
Q/3 rep l icas e, 36
rand om, 63
exp erimenter, 281
exp l oration, 28
exp res s ion, 327
exp res s ion
al gebraic, 316
S -, 240, 316, 317
S -
LI S P, 317, 320
s u b-, 327
s ymbol ic, 382
extru ction
f eatu re, 210
F
F-tes t, 208
f actor
temp eratu re
crys tal ograp h ic, 345
f arm
p roces s or
p aral l el -, 373
f eatu re, 109
f eatu re
d omain, 10, 21
f eatu re extraction, 210
f eed back, 126
f il ter
p as s
l ow, 213
f itnes s , 89, 91, 126, 154, 220,
264, 303
f itnes s
binary, 91
ef f ectiv e, 187-190, 192,194-
197, 222
normal ized , 127
of f s p ring-p arent
d if f erential , 291
s tand ard ized , 127
f itnes s ch ange, 151
f itting
ov er, 229
f ormu l a
Heron, 307
FO RTRA N, 315
f ragment
tree, 146
f requ ency
cl ock, 363
rel ativ e, 63
f u nction
arith metic, 110
arith metic
binary, 254
u nary, 254
au tomatical l y d ef ined , 274,
284, 286, 287
Bool ean, 110
conv ol u tion, 349
cu be, 286
f itnes s , 126
f itnes s
continu ou s , 127
error, 128
mu l tiobjectiv e, 129
s cal ed , 128
s qu ared error, 128
if -th en, 337
ind exed memory, 111
p otential , 20
p robabil ity d ens ity, 65
p robabil ity d ens ity
continu ou s , 65
RNA , 36
s et, 295
s et v al u e, 295
trans cend ental , 110
v ariabl e as s ignment, 110
GA , 95
GE MS , 262, 263
gene, 43
gene
ad d ition of, 163
general ization, 11, 70, 229
generation
maximu m nu mber of ... s ,
336
s tead y-s tate, 135
genetic p rogramming
bas ed
grammar, 270
tree, 243, 246
binary, 250
context-f ree grammar, 271
cu l tu ral , 296
d ev el op mental , 250, 251,
253, 255
L-s ys tem, 273
l inear, 243
regis ter mach ine, 261
s tep toward , 98
s trongl y typ ed , 260
tree-bas ed , 295
typ ed
s trongl y, 298
genome, 46, 113, 267
genome
bas ed
tree, 262
cod e
mach ine, 114
grap h , 265
l ength
f ixed , 178
v ariabl e, 179
l inear, 243
tree, 240
genotyp e, 45, 46, 48, 185, 250,
253, 267
genotyp e
l ength
f ixed , 177
v ariabl e, 177, 179
gl u t amine, 41
GMDH, 267
grad ient d es cent, 24
grammar, 261, 272, 273
grammar
context-f ree, 270
context-f ree
terminal of, 272
grap h , 81, 265, 295
grap h
d ataf l ow, 258
grap h ics
comp u ter, 341
growth
exp onential , 196
intron, 193, 337
tis s u e, 382
gu anine, 40
H
h and l ing
d ata
grou p meth od of, 267
h ard ware
ev ol v abl e, 75
h ered ity
biol ogical , 46
HiGP, 301
h is togram
f itnes s , 223
h omol ogy, 166
h yp oth es is
bl ock
bu il d ing, 144
bu il d ing bl ock
genetic p rogramming, 24
I
id entif ication
s ys tem, 267
image
bitmap , 295
imp l ementation
genetic p rogramming
u s ing array f or, 325
u s ing s tack f or, 325
ind eterminis m, 6
ind iv id u al
genetic p rogramming, 314
size
v ariabl e, 320
ind u ction, 229
ind u ction
au tomatic, 114
p rogram, 5, 27, 101
p rogram
ev ol u tionary, 248
inf ormation
al gorith mic, 70
initial ization
. . . in A I MGP, 121
bod y, 121
f u l l , 119
grow, 119
ramp ed h al f -and -h al f , 119
rand om, 7
s tru ctu re
l inear, 120
tree, 118
innov ation, 58, 93
inp u t
Bool ean, 299
nu mber of, 321
nu merical , 299
ins tance
training, 10
ins tru ction, 7, 34
ins tru ction
il l egal , 334
intel l igence
artif icial , 8, 303, 380, 387
I nternet, 382
interp reter, 17, 21, 315
interp reter
m of n, 18
Bool ean
conju nctiv e, 17
LI S P, 317
th res h ol d , 18
interv al
conf id ence, 206, 207
intron, 44, 45, 164, 170, 180,
181, 206, 225, 293
intron
artif icial l y ins erted , 187
d ef ined
exp l icitl y, 164
ef f ect of
bad , 195
good , 197
emergent, 187, 195
exp l icitl y d ef ined , 196
gl obal , 187
growth of, 193
l ocal , 187
p ers is tence of, 182
intron equ iv al ent
artif icial , 187, 195
intru s ion, 358
iteration, 179, 292, 294
Jackknif e, 235
joint, 374, 375
ju mp , 334
K
Kh ep era, 365
Knn, 347
knowl ed ge, 8
knowl ed ge
d omain
exp ert s ys tem, 8
minimal a p riori, 370
l angu age
ap p l icativ e, 78
as s embl y, 76
d ef inition
concep t, 21
d es crip tion
concep t, 13
h ard ware, 357
f u nctional , 78
imp erativ e, 77
JB, 261
l ev el
h igh -, 77, 296
l ow-, 77
mach ine, 76, 257
mach ine
regis ter, 261
natu ral , 295, 341
oriented
mach ine, 77
object, 78
p robl em, 77
p red icativ e, 78
p rogramming
Tu ring comp l ete, 68
p u rp os e
general , 77
s p ecial , 77
Tu ring comp l ete, 22, 68
Las t I n - Firs t O u t, 324
l aw
imp rov ement, 383
leaf , 21, 109
l earning, 8
l earning
cu l tu ral , 296
emergent, 165
ev ol u tionary, 38, 58
ind u ctiv e, 6
mach ine, 4, 9, 154, 376,
380, 387
mach ine
h eu ris tic, 27
reinf orcement, 29
rep res entation
ad ap tiv e, 291
s u p erv is ed , 28
u ns u p erv is ed , 28
l ength
d es crip tion
minimal , 270, 302
ef f ectiv e, 284
maximu m, 118
v ariabl e, 22
v ariation of, 333
l ev el
s ignif icance
s tatis tical , 205
l ibrary, 265, 284
lif e
artif icial , 382, 383, 387
LI FO , 324
l imit
Bremermann, 90
iteration, 294
l ine
inp u t, 267
ou tp u t, 267
l inkage, 94
LI S P, 284, 295, 316
LI S P
f l av or of, 319
l is t, 81
l is t
argu ment, 285
d el etion f rom, 324
ins ertion to, 324
l inked , 321, 323, 324
l inked
d ou bl y, 322, 323
LI S P, 314-316
ord ered , 320
l ocu s , 249
l oop , 293, 334
M
mach ine
comp u ting, 67
regis ter, 114, 243, 257
regis ter
th ree-ad d res s , 114
two-ad d res s , 114
s tate
f inite, 100
Tu ring, 67
Tu ring
action of, 67
u niv ers al , 69
v irtu al , 330
v on Neu mann, 72, 73, 82
macro
au tomatical l y d ef ined , 291
macromu tation
trad itional genetic p rogram-
ming cros s ov er acts as ,
155
map p ing, 346
map p ing
genotyp e-p h enotyp e, 251
MDL, 270
MDP, 118
meas u re
f itnes s , 346, 382
meas u rement, 205, 206
meas u rement
intron, 226
meme, 296
memory, 113, 259, 293, 295,
312, 315
memory
f ragmented , 314
gl obal , 115
ind exed , 117, 297, 298, 329
l ocal , 113
l ocal ized , 117
meth ionine, 41
meth od
congru ential
l inear, 61
f u l l , 119
metric
ev al u ation, 27
minimu m
l ocal , 154, 306, 338
mining
d ata, 215, 341
trait, 218
mod el , 257
mod el
mental , 298
mod el ing, 341
mod if ication
ontogenetic, 301
p h yl ogenetic, 301
mod u l arization, 283
mod u l e, 283, 284, 289-291
mod u l e
acqu is ition of, 290
cl as s if ier, 346
Mu l l er's rach et, 54
mu tation, 7, 24, 49, 54, 58, 89,
93, 125, 154, 170, 194,
240, 244, 246, 269, 292,
299, 330
mu tation
exp ans ion, 245
f rames h if t, 49
gene d u p l ication, 242
h ois t, 244
l inear, 125
macro-, 145, 147, 151, 153,
155, 156, 158, 169
p ermu tation, 243
p oint, 241
s u btree, 247
s u btree
col l ap s e, 246
tree bas ed , 125
u nres tricted , 255
N
neigh bor
K-neares t, 19, 343
network
ad ap tiv e
f u zzy, 9
Bool ean
conju nctiv e, 9
d is ju nctiv e, 9
neu ral , 5, 9, 354, 355
neu ral
au tomatic generation of,
354
general regres s ion, 20
Koh onen, 29
mu l til ayer f eed f orward ,
12, 18
p robabil is tic, 20
s u b-
au tomatic d ef inition of,
356
neu ron, 18
nod e, 81, 109, 321
nod e
d ep th of, 118
execu tion
p rogram, 319
internal , 21
op erator, 260
rel abel ing of, 306
root, 81
terminal , 260
u s e of, 227
non-s ep arabil ity, 19
nu mber
rand om, 61
rand om
p s eu d o, 61
qu as i, 61
termination, 252
o
object, 78
O ccam, 360
of f s p ring, 154
ontogeny, 46, 48, 299
op cod e
v irtu al , 7
op eration
al tering
arch itectu re, 287
op erator
cros s ov er, 122
ef f ect of, 224
el imination of, 180
genetic
d es tru ctiv e, 187
retu rn, 333
s earch , 23, 144
s mart, 266
trans f ormation, 23
op timization, 89, 304, 341
op timization
p arameter
f ixed l ength , 177
qu ery
d atabas e, 345
op timu m
l ocal , 365
ord er
p os tf ix, 113, 325
p ref ix, 113, 327
organis m, 382
ou tp u t
Bool ean, 299
nu merical , 299
ov erh ead
ru n-time, 227
P
PA DO , 116,153,161, 228, 240,
265, 328, 329, 362
Paragen, 359
p aral l el al gorith m d is cov ery and
orch es tration, 265, 328,
329
p aral l el al gorith m d is cov ery and
orch s tration, 265
p aral l el ization, 134, 279
p aral l el ization
au tomatic, 359
p arameter, 334
p arameter
s etting of, 279, 310
s trategy, 99
p ars imony
ad ap tiv e, 337
p art
p rogram-
action, 265
branch -d ecis ion, 265
Parzen's es timator, 20
Pas cal , 284, 315
p ath
s earch , 26
p erf ormance, 216
p ermu tation, 60, 242
p ertu rbation
cons tant, 371
p h as e
d ev el op mental , 357
ev ol u tionary, 357
p h enome, 46, 113
p h enome
l inear, 114
tree bas ed , 113
p h enotyp e, 45, 46, 48, 185, 250,
267
Ph il ia, 383
p oint
cros s ov er
l egal , 334
p ol ynomial , 13
p ol yp ep tid e, 42
p ool
gene, 297
meme, 297
p op , 324
p op u l ation, 6, 93, 130, 311
p op u l ation
as exu al , 54
p aral l el , 279
s tatis tical , 205
p red icate, 78
p rep roces s ing, 209
p rep roces s ing
d ata, 210
p res s u re
p ars imony, 302, 337
p ars imony
ad ap tiv e, 302
s el ection, 130, 133
s el ection
l ow, 337
p robabil ity, 63, 205
p robabil ity
cond itional , 64
d is ru p tion, 147
p robabil ity th eory, 60
p robl em
ant
artif icial , 304
ap p roximation
f u nction, 268
cl as s if ication, 11
control , 292, 364
h al ting, 69
id entif ication
s ys tem, 306
mu l tip l exer
Bool ean, 154
p red iction
s equ ence, 100
s equ ence, 347
s mal l , 335
p roces s
Bernou l l i, 65
engineering, 380
l earning, 9, 34
s toch as tic, 108
p roces s ing
ef f ort of, 217
image, 341
s ignal , 341
p roces s or, 330
p roces s or
mas ter, 280
p rod u ction
benef icial , 273
p rogram, 112
p rogram
as s embl er
v irtu al , 91
comp il ed , 312
f eas ibl e, 250
inf eas ibl e, 250
p aral l el , 360
s earch
tree, 294
s u b-, 265
s u b-
l ibrary, 265
p riv ate, 265
p rogrammer, 4, 298, 315, 317,
326
p rogramming
au tomatic, 4, 88, 101
ev ol u tionary, 100
ontogenetic, 301
p rop os ition, 208
p rotection
cros s ov er, 198, 284, 292
gl obal , 198
p rotein, 42
p rov ing
th eorem, 90
p u s h , 324
Q
qu al ity
l earning, 10
s ol u tion, 270
R
RA M, 314
RA M
acces s th e, 314
rand omnes s , 60
rate
h it, 244, 245
h it
op erator, 244
reas oning
bas ed
memory, 361
recip ient, 165
recognition
p attern, 90, 307, 341
recombination, 99, 253, 298
recombination
brood , 158, 160, 162
d is crete, 99
h omol ogou s , 53
h omol ogou s
intragenic, 52
non-, 51
intermed iate, 99
s exu al , 54
s exu al
h omol ogou s , 49
trans p os on, 52
record , 81
recu rs ion, 293
red u nd ancy
cod on, 41
DNA , 41
regis ter, 74, 257, 261, 263, 295
regres s ion, 306
regres s ion
f u nction, 135
mu l tip l e, 207, 208
s ymbol ic, 128, 262
rel abel ing
nod e, 306
rep air, 48
rep res entation, 18, 92, 210, 291,
310
rep res entation
ad ap tiv e, 290
binary
f ixed l ength , 95
cons trained , 22
d u al , 330
l ength
f ixed , 95
l ev el
l ow-, 310
p robl em, 12, 180
p robl em
cons trained , 180
s u p ers et of . . . s , 22
rep rod u ction, 28, 58, 95, 126,
150, 240
rep rod u ction
s exu al , 54, 58, 59, 144
res earch er
genetic p rogramming, 390
reu s e, 288
ribozyme, 38
RNA , 35-37
RNA
f as t, 37
f u nctional , 44
Q/3 rep l icas e, 176
r-, 42
t-, 42
trans cribed
non-, 42
robot, 281
robot
h exap od al
s imu l ated , 370
Kh ep era, 365
real , 364
s imu l ated , 364
robotics , 370, 383
rotation, 368
rotation
axis
bod y, 369
ru l e
generations
50, 278
ru n
inf erence, 78
one gene-one p ol yp ep tid e,
44
one gene-one p rotein, 44
p rod u ction, 240, 272
rewriting
grap h , 355
th u mb, 310
accel erating a, 279
genetic p rogramming, 176,
278, 279
GP, 133, 135
GP
generational , 133
s tead y s tate, 133
s tagnation of, 195
terminating a, 279
s amp l e, 205
s amp l e
nod e, 206
s amp l ing
p robal is tic, 365
s toch as tic, 160, 280
s cenario
E S , 130
GA , 130
s ch ema, 96, 145
s ch ema
rooted -tree, 190
s ch ema th eorem, 145
s cience
comp u ter, 348
s earch , 253, 365
s earch
beam, 9, 27, 160
bl ind , 9, 25
ev ol u tionary, 37
exh au s tiv e, 26
genetic p rogramming, 299
l ocal , 307
rand om, 37, 91
s p ecial -p u rp os e, 307
tree
bread th -f irs t, 26
d ep th -f irs t, 26
u ncons trained , 253
s eed , 62
s el ection, 89, 94, 126, 129, 179
s el ection
H + A, 132
fi,\, 132
cu mu l ativ e, 179
f itnes s p rop ortional , 95, 130
f itnes s -bas ed , 126
generational , 130
iterativ e, 180
mating, 89, 167
natu ral , 35, 37, 47, 48, 58,
99
ov er-p rod u ction, 99
ranking, 132
rou l ette wh eel , 96
s tead y s tate, 134
s trategy
ev ol u tionary, 99
tou rnament, 132, 134, 166
tru ncation, 132
s el ector, 82
S E LE X, 38, 384
s el f -mod u l arization, 283
s emantics
p res erv ation of, 157
s equ ence, 246
s equ ence
bas e p air
DNA , 34
control , 44
raw, 252
s ymbol , 254
s eries
time, 213
s et
cas e
f itnes s , 281
d ata
I ris , 11
f u nction, 110, 295, 336
f u nction
s tatis tical -comp u ting-zone
349
minimal -d is tance, 252
p arameter, 279
p ower, 82
s ymbol
l egal , 252
terminal , 109, 336
tes t, 234
training, 10, 127, 215, 229,
234, 311, 331
v al id ation, 234
s ignif icance, 204
s ignif icance
s tatis tical , 204
S I MD, 280
s imil arity
s tru ctu ral
meas u rement of, 167
s imu l ation, 371
s ize
brood , 159
ind iv id u al
av erage, 311
p op u l ation, 93, 311, 335,
336, 359
p rogram
initial , 338
maximu m, 337, 338
s ol u tion, 337
tree
s u b-, 320
s ol u tion
cand id ate, 13, 23
l ength
f ixed , 181
v ariabl e, 179, 181
op timal , 154
s ol v ing
p robl em, 90
s p ace
f u nction, 82
s amp l e, 63
s earch , 60, 154
s p ecies , 53
s p eed , 259
S PI C E , 373
s tabil ity, 59
s tabil ity
genetic, 48
inh eritance, 48
s tack, 324, 328, 329
s tagnation, 176
s tagnation
ru n, 195
s tate
f inal , 36
s tatement
cond itional , 111
l oop , 111
p rogram, 283
trans f er
control , 111
s tatis tics , 20
S TGP, 260
s trategy
ev ol u tionary, 98, 99
s tring, 295
s tring
bit, 21
S TRO GA NO FF, 267, 269
s tru ctu re, 265, 300
s tru ctu re
comp l ex, 382
control , 292
d ata, 79, 313
d ata
abs tract, 296
comp os ed , 79
h igh -l ev el , 330
s imp l e, 79
gene
mu l tip l e, 164
genotyp e, 185
grap h , 240, 328
l ength
f ixed , 177
v ariabl e, 34
l is t
l inked -, 319
p h enotyp e, 185
p rogram, 117, 301
p rogram
l inear, 302
recu rs iv e, 81
RNA , 36
s torage, 322
tree, 5, 113, 118, 240, 316
tree
imp l icit, 325
v irtu al , 113
s u brou tine, 111
s ymbol
cl os es t, 252
d on't care, 146
s yntax, 295
s yntax
C , 254
s ynth es is
circu it, 357
s ys tem
0L-, 273
A I MGP, 114, 226
Bayes /Parzen, 12
Bool ean
conju nctiv e, 15
d is ju nctiv e, 16
p u re, 15
brittl e, 278
C , 319
cl as s if ication
au tomatic MBR, 361
cl as s if ier, 97, 98
conju nctiv e, 16
connectionis t, 9
d etection
genetic p rogramming bas ed ,
359
d is ju nctiv e, 16
d ynamical , 94, 344
exp ert, 8
GE MS , 262
genetic p rogramming, 301,
346, 347, 349, 351, 361,
362, 366, 372, 374, 375,
393
genetic p rogramming
comp il ing, 114
grap h bas ed , 265
interp reting, 260
mach ine cod e-oriented ,
330
toroid al mes h , 279
tree-bas ed , 259
HiGP, 301
h ybrid , 305, 341
I L-, 274
ins tance av eraging, 19
K-neares t neigh bor, 20
knowl ed ge
exp ert, 8
L-, 273
L-
context-s ens itiv e, 274
l earning
mach ine, 12, 27
Lind enmayer, 273
network
neu ral , 24
s el ection
cons tru ctional , 163
tree
C , 314
tank
s tirring of a, 343
tech niqu e
memory
ind exed , 296
terminal , 109, 288, 292
terminal
non-, 272, 274, 288
rand om, 242
termination, 294
termination
ru n, 279
terms
A ris totel ian, 9
Bool ean, 9, 14
tes t
X
2
,62
F, 208
F, 208
s tu d ent's t, 207
th eorem
h al ting, 70, 293
s ch ema, 97, 145, 151
s ch ema
rooted -tree, 190
th ymine, 40
time
C PU, 311
ru n, 279
tool
anal ys is
of f l ine, 204
onl ine, 204
meas u rement
onl ine, 219
torqu e, 374
tou rnament, 337
training, 9
training
network
neu ral , 344
trans crip tion, 251
trans f er
inf ormation
non-genetic, 296
trans f orm
Fou rier
d is crete, 214
f as t, 337
trans ition
p oint of, 380
trans l ation, 252
trans mis s ion
cu l tu ral , 306
trans p os on, 50
tree, 113, 295
tree
A DF, 274
d ecis ion, 21
exp res s ion, 313, 317
mu l tip l e, 296
s u b-, 260, 288-290, 318,
320, 327, 373
tree f ragment, 146
tree s tru ctu re, 316
tru ncation, 132
tu be
tes t, 35
tu torial
genetic p rogramming, 389
typ e
d ata, 298
d ata
abs tract, 296
generic, 299
typ ing, 278
u
u nit
th res h ol d , 17
u s e
nod e, 227
V
v al u e
B-, 345
exp ectation, 64
inp u t
real , 256
ou tp u t
real , 256
regis ter, 260
v ariabil ity
genetic, 48
v ariabl e
rand om, 64
v ariance, 64
v ariance
f itnes s , 223
v ariant, 6
v ariants
RNA , 37
v ariation, 35, 59, 61, 89
v ariation
ad d itiv e, 65
genetic, 49
l ength , 333
mu l tip l icativ e, 66
v ector
l ength
f ixed , 177
v el ocity
terminal
rate-l imited non-zero, 368
res t-to-res t, 368
w
weigh ts /l inks /connections
ch ange of, 267
You might also like
- 2011 - Powering Autonomous Sensors - PenellaDocument155 pages2011 - Powering Autonomous Sensors - PenellafergusoniseNo ratings yet
- R-30ia Karel Reference Manual (Ver.7.30) (Marrcrlrf04071e Rev.b)Document947 pagesR-30ia Karel Reference Manual (Ver.7.30) (Marrcrlrf04071e Rev.b)anonomail100% (6)
- Adhocwirelessnetworksarchitecturesandprotocolsc 150228134214 Conversion Gate01 PDFDocument814 pagesAdhocwirelessnetworksarchitecturesandprotocolsc 150228134214 Conversion Gate01 PDFShruti SharmaNo ratings yet
- MATLAB BASED SPECAN AlgorithmDocument91 pagesMATLAB BASED SPECAN Algorithmnaivedya_mishra0% (1)
- The Ibm Asic/Soc Methodology - A Recipe For First-Time SuccessDocument12 pagesThe Ibm Asic/Soc Methodology - A Recipe For First-Time Successjagmohan.nanawareNo ratings yet
- Queueing Networks and Markov Chains: Modeling and Performance Evaluation with Computer Science ApplicationsFrom EverandQueueing Networks and Markov Chains: Modeling and Performance Evaluation with Computer Science ApplicationsRating: 5 out of 5 stars5/5 (1)
- Lecture Notes in Computer Science 3484: Editorial BoardDocument354 pagesLecture Notes in Computer Science 3484: Editorial BoardAndrxx BrittoNo ratings yet
- Integrated CircuitDocument14 pagesIntegrated CircuitPablo ArevaloNo ratings yet
- Esteban Tlelo-Cuautle, Jose Rangel-Magdaleno, Luis Gerardo de la Fraga (auth.)-Engineering Applications of FPGAs_ Chaotic Systems, Artificial Neural Networks, Random Number Generators, and Secure Comm.pdfDocument230 pagesEsteban Tlelo-Cuautle, Jose Rangel-Magdaleno, Luis Gerardo de la Fraga (auth.)-Engineering Applications of FPGAs_ Chaotic Systems, Artificial Neural Networks, Random Number Generators, and Secure Comm.pdfYehuda GiayNo ratings yet
- Microwave WeewrDocument17 pagesMicrowave WeewrDeepak SharmaNo ratings yet
- Lecture0 Design ProcessDocument15 pagesLecture0 Design ProcessSiam HasanNo ratings yet
- Cai, Baoping - Bayesian Networks in Fault Diagnosis Practice and Application-World Scientific Publishing (2019) PDFDocument418 pagesCai, Baoping - Bayesian Networks in Fault Diagnosis Practice and Application-World Scientific Publishing (2019) PDFMarcos RamisNo ratings yet
- Algorithms On String Trees and SequencesDocument326 pagesAlgorithms On String Trees and SequencesJason ShumNo ratings yet
- Tunable RF Components and Circuits Applications in Mobile Handsets by Jeffrey L. Hilbert and Krzysztof IniewskiDocument342 pagesTunable RF Components and Circuits Applications in Mobile Handsets by Jeffrey L. Hilbert and Krzysztof IniewskiRichard VargasNo ratings yet
- Stochastic Processes and Applications To Mathematical Finance (Akahori, Ogawa & Watanabe 2006-03-06) (49EB5E2E)Document228 pagesStochastic Processes and Applications To Mathematical Finance (Akahori, Ogawa & Watanabe 2006-03-06) (49EB5E2E)dj bajiNo ratings yet
- KU BAND MICROWAVE POWER AMPLIFIER Using AWRDocument81 pagesKU BAND MICROWAVE POWER AMPLIFIER Using AWRKrishna PrasadNo ratings yet
- UserManual ReliabilityDocument74 pagesUserManual Reliabilitymatua trevorNo ratings yet
- Applied Nonparametric RegressionDocument426 pagesApplied Nonparametric RegressionIntan Purnomosari100% (1)
- CASIO BASIC Comparison SheetDocument36 pagesCASIO BASIC Comparison SheetIñaki EseberriNo ratings yet
- Contemporary Communication Systems Using Matlab Proakis and SalehiDocument443 pagesContemporary Communication Systems Using Matlab Proakis and SalehiRegislane Paiva Lima100% (2)
- Thirring1983 ACourseInMathematicalPhysics4 SpringerDocument298 pagesThirring1983 ACourseInMathematicalPhysics4 SpringerBoutet de Monvel JacquesNo ratings yet
- Optical Splitter Whitepaper - 02Document16 pagesOptical Splitter Whitepaper - 02s_waqarNo ratings yet
- Introduction to Stochastic Search and Optimization: Estimation, Simulation, and ControlFrom EverandIntroduction to Stochastic Search and Optimization: Estimation, Simulation, and ControlRating: 4 out of 5 stars4/5 (2)
- Database PL SQL Language ReferenceDocument891 pagesDatabase PL SQL Language ReferenceAbdelrhman SalahNo ratings yet
- Software RadioDocument117 pagesSoftware Radiochocobon_998078100% (1)
- Fundamentals of Global Positioning System Receivers: A Software ApproachFrom EverandFundamentals of Global Positioning System Receivers: A Software ApproachNo ratings yet
- RoughPaths 2Document263 pagesRoughPaths 2Tommy TommyNo ratings yet
- MIMO Radar - Demystified - 2013-01-15 - Microwave JournalDocument13 pagesMIMO Radar - Demystified - 2013-01-15 - Microwave JournalSudantha Jayalal PereraNo ratings yet
- A Generic Approach For Nesting 2d Parts in 2d SheetsDocument13 pagesA Generic Approach For Nesting 2d Parts in 2d SheetsRohit KoreNo ratings yet
- 2 - SimulationSetup (Till DYRE)Document46 pages2 - SimulationSetup (Till DYRE)mohamed faisal100% (1)
- Orthogonal Code Generator For 3G Wireless Transceivers: Boris D. Andreev, Edward L. Titlebaum, and Eby G. FriedmanDocument4 pagesOrthogonal Code Generator For 3G Wireless Transceivers: Boris D. Andreev, Edward L. Titlebaum, and Eby G. FriedmanSrikanth ChintaNo ratings yet
- Singular Value Decomposition Tutorial - Kirk BakerDocument24 pagesSingular Value Decomposition Tutorial - Kirk BakerolgiasNo ratings yet
- On The Calculation of International Roughness Index - 1501 - SayerDocument12 pagesOn The Calculation of International Roughness Index - 1501 - SayerrendyNo ratings yet
- Broadband Circuits For Optical Fiber CommunicationDocument116 pagesBroadband Circuits For Optical Fiber Communicationmilos nikitovic0% (1)
- A. G. Grozin - Using REDUCE in High Energy Physics (1997) (QED)Document400 pagesA. G. Grozin - Using REDUCE in High Energy Physics (1997) (QED)Anonymous 3NmUUDtNo ratings yet
- Learning Autodesk Inventor 2010-ToCDocument24 pagesLearning Autodesk Inventor 2010-ToCMaxwellNo ratings yet
- Prony Method of IIR Filter DesignDocument49 pagesProny Method of IIR Filter DesignKarim ShahbazNo ratings yet
- Kumar - Deep Recurrent Q-Networks For Market Making PDFDocument10 pagesKumar - Deep Recurrent Q-Networks For Market Making PDFStephane MysonaNo ratings yet
- SimpleSumo Educational Fighting Robots PDFDocument38 pagesSimpleSumo Educational Fighting Robots PDFjhonNo ratings yet
- (Lecture Notes in Electrical Engineering 145) Abbas Mohammadi, Fadhel M. Ghannouchi (Auth.) - RF Transceiver Design For MIMO Wireless Communications-Springer-Verlag Berlin Heidelberg (2012)Document301 pages(Lecture Notes in Electrical Engineering 145) Abbas Mohammadi, Fadhel M. Ghannouchi (Auth.) - RF Transceiver Design For MIMO Wireless Communications-Springer-Verlag Berlin Heidelberg (2012)Nebiye SolomonNo ratings yet
- Ngspice 30 Manual PDFDocument631 pagesNgspice 30 Manual PDFHazelle MamugayNo ratings yet
- Markov Chains QueueingDocument159 pagesMarkov Chains QueueingSelvam Pds100% (1)
- Neural Network For SSCV HydrodynamicsDocument104 pagesNeural Network For SSCV Hydrodynamicsvane-16No ratings yet
- IIR Filter DesignDocument40 pagesIIR Filter DesignMxaz MyzxNo ratings yet
- Balanis Antenna Theory A ReviewDocument17 pagesBalanis Antenna Theory A ReviewGetahun TesfaNo ratings yet
- THE BURROUGHS B5000 CONFERENCE (1985) Oral History ReportDocument151 pagesTHE BURROUGHS B5000 CONFERENCE (1985) Oral History Reportjblair33No ratings yet
- FFTContent PDFDocument8 pagesFFTContent PDFAaaaaNo ratings yet
- Phased Array System Toolbox™ ReferenceDocument1,698 pagesPhased Array System Toolbox™ ReferenceVictor Colpo NavarreteNo ratings yet
- Modelling of Bang Bang PDDocument141 pagesModelling of Bang Bang PDRakesh KumarNo ratings yet
- MissileDocument14 pagesMissileTasmia Tamanna100% (1)
- 64 Ia 32 Architectures Optimization ManualDocument842 pages64 Ia 32 Architectures Optimization ManualRaphael de Vasconcelos NascimentoNo ratings yet
- Xcos Block ExercisesDocument99 pagesXcos Block ExercisesdummyNo ratings yet
- LDPCDocument40 pagesLDPCAli Subhi Al-SadiNo ratings yet
- GhyfryDocument84 pagesGhyfryDeepak SharmaNo ratings yet
- Distributed Control of Robotic Networks: A Mathematical Approach to Motion Coordination AlgorithmsFrom EverandDistributed Control of Robotic Networks: A Mathematical Approach to Motion Coordination AlgorithmsRating: 5 out of 5 stars5/5 (1)
- A Systematic Review of Network Protocol Fuzzing TechniquesDocument6 pagesA Systematic Review of Network Protocol Fuzzing Techniqueszuoyuan peng100% (1)
- 0 - ContentsDocument31 pages0 - ContentsAmin PiNo ratings yet
- 5.Eng-Peak Cancellation Crest Factor-VINAY REDDY NDocument10 pages5.Eng-Peak Cancellation Crest Factor-VINAY REDDY NImpact JournalsNo ratings yet
- Lightgbm Gradient Boosting TreeDocument9 pagesLightgbm Gradient Boosting TreeweaponNo ratings yet
- (New) Level 5 MIT App Inventor Shooting Target ProjectDocument38 pages(New) Level 5 MIT App Inventor Shooting Target ProjectRanjan ZambareNo ratings yet
- Table ValueDocument7 pagesTable Valueankur1040No ratings yet
- PDS LAB 1 ManualDocument77 pagesPDS LAB 1 ManualalgatesgiriNo ratings yet
- MG University BTech Computer Science SYLLABUSDocument76 pagesMG University BTech Computer Science SYLLABUSkrazymax67% (3)
- Gen Diff ProtpdfDocument55 pagesGen Diff ProtpdfAyan MajiNo ratings yet
- Programming in C and C++Document2 pagesProgramming in C and C++soni chauhanNo ratings yet
- Gdblab PDFDocument4 pagesGdblab PDFkiran9262No ratings yet
- PSP MaterialsDocument86 pagesPSP MaterialsCamilo Andres Suarez100% (1)
- Space Invaders: Lund University Faculty of EngineeringDocument13 pagesSpace Invaders: Lund University Faculty of EngineeringNiharika GuptaNo ratings yet
- Ruhi Data Visul BasicDocument53 pagesRuhi Data Visul BasicShree CyberiaNo ratings yet
- CCP & Data Structure PDFDocument112 pagesCCP & Data Structure PDFshivanand_shettennavNo ratings yet
- Python NotesDocument48 pagesPython NotesSneha BanerjeeNo ratings yet
- Excel VBA String FunctionsDocument17 pagesExcel VBA String FunctionsYamini ShindeNo ratings yet
- SDT September 2015 Marking Scheme FinalDocument5 pagesSDT September 2015 Marking Scheme FinalGracious HollaNo ratings yet
- Copy Unit IIDocument60 pagesCopy Unit IIrohith addalaNo ratings yet
- IPiano Electronic Piano With Arduino in Tinkercad 1Document14 pagesIPiano Electronic Piano With Arduino in Tinkercad 1fchjNo ratings yet
- Guide To Interviewing DevelopersDocument14 pagesGuide To Interviewing DevelopersJohnnyNo ratings yet
- Getting Started v2019r3Document183 pagesGetting Started v2019r3Ramiro Izquierdo SantaféNo ratings yet
- 10Document29 pages10hpss77No ratings yet
- Dfs NotesDocument69 pagesDfs NotesDhiraj ThakkarNo ratings yet
- 01 Modicon m218 Logic Controller Programming GuideDocument188 pages01 Modicon m218 Logic Controller Programming GuideHữu Dũng Nguyễn100% (1)
- Hkcee Comp 1992Document16 pagesHkcee Comp 1992api-3724690No ratings yet
- Visual BasicDocument71 pagesVisual BasicAmos WambuguNo ratings yet
- CS401 ASSIGNMENT 2 by Abid AliDocument8 pagesCS401 ASSIGNMENT 2 by Abid AliZeeNo ratings yet
- Advance Automation Through QTPDocument3 pagesAdvance Automation Through QTPsathiyarajsapNo ratings yet
- Hsa PRM 1.2Document434 pagesHsa PRM 1.2kocirekNo ratings yet