You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (844)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5811)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Lesson Plan Regular-Irregular VerbsDocument2 pagesLesson Plan Regular-Irregular VerbsNath Zuleta50% (2)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- "Mark Twain and Homosexuality," Andrew J. Hoffman (1995)Document28 pages"Mark Twain and Homosexuality," Andrew J. Hoffman (1995)JonathanNo ratings yet
- TVM Test BankDocument13 pagesTVM Test Bankbowiiz12100% (1)
- Property, Plant and Equipment (Part 2) : Problem 1: True or FalseDocument16 pagesProperty, Plant and Equipment (Part 2) : Problem 1: True or FalseChrismae Monteverde SantosNo ratings yet
- Poultry MeatDocument26 pagesPoultry Meatjoebelle senadorNo ratings yet
- The Roth PrescriptionDocument7 pagesThe Roth PrescriptionsanjeetNo ratings yet
- Petrophysical Evaluation of Mishrif Formation in X Oilfield, Southeastern IraqDocument15 pagesPetrophysical Evaluation of Mishrif Formation in X Oilfield, Southeastern IraqAymen AlsudanyNo ratings yet
- GugujjDocument13 pagesGugujjJaswanth SunkaraNo ratings yet
- Santillana I SaberEs ClaveDocument221 pagesSantillana I SaberEs ClaveSusy BoeroNo ratings yet
- Resume ExampleDocument1 pageResume ExampleCorey CadiganNo ratings yet
- P&L - CPCDocument35 pagesP&L - CPCRadouane ZaamiNo ratings yet
- Diesel Generator Set QSK60 Series Engine: 2063kVA - 2500kVA 50Hz 2000kW - 2250kW 60HzDocument4 pagesDiesel Generator Set QSK60 Series Engine: 2063kVA - 2500kVA 50Hz 2000kW - 2250kW 60Hzchock channel 19No ratings yet
- Kinematics of Rigid Bodies (Part II) Absolute and Relative Acceleration in Plane MotionDocument22 pagesKinematics of Rigid Bodies (Part II) Absolute and Relative Acceleration in Plane MotionKoh Boon LiNo ratings yet
- Witing TOEFL IBT Test 1Document2 pagesWiting TOEFL IBT Test 1Miriam ChiovettaNo ratings yet
- Mount Everest: Read The Text and Do The Exercises That FollowDocument2 pagesMount Everest: Read The Text and Do The Exercises That FollowVíctor TarínNo ratings yet
- CHE 304 PDC-2022 PYQsDocument8 pagesCHE 304 PDC-2022 PYQsHarsh TekriwalNo ratings yet
- POST Newspaper For 12th of September, 2015Document96 pagesPOST Newspaper For 12th of September, 2015POST NewspapersNo ratings yet
- 392271B K-Gauge DPMS User ManualDocument25 pages392271B K-Gauge DPMS User ManualediNo ratings yet
- ITEC 264: Research Assignment: Wireless SecurityDocument5 pagesITEC 264: Research Assignment: Wireless SecuritySir_RemingtonNo ratings yet
- D 1250Document3 pagesD 1250Diee Junkkis Hidayat100% (1)
- Quiz 10Document2 pagesQuiz 10denisa kacaNo ratings yet
- Course On Medical Modelling at The London Taught Course Centre (LTCC)Document13 pagesCourse On Medical Modelling at The London Taught Course Centre (LTCC)jcgomezuNo ratings yet
- CH 15Document80 pagesCH 15Hasan AzmiNo ratings yet
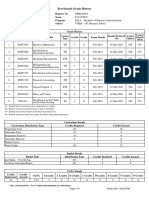
- StudentGradeHistory 20BBA0044Document1 pageStudentGradeHistory 20BBA0044Naveen AryaNo ratings yet
- Max. Deflection, Shear and MomentDocument1 pageMax. Deflection, Shear and MomentBenson Mwathi MungaiNo ratings yet
- Caltech Catalogue 2011-2012 FullDocument676 pagesCaltech Catalogue 2011-2012 Fullcan can1990No ratings yet
- Documentation Specialist Cover LetterDocument7 pagesDocumentation Specialist Cover Letterc2zqd0ct100% (1)
- Vyom SSO Edge Data SheetDocument2 pagesVyom SSO Edge Data SheetGiriprasad GunalanNo ratings yet
- The Power of Options: Always Give Yourself Four Ways To WinDocument9 pagesThe Power of Options: Always Give Yourself Four Ways To WinSamarth KharbandaNo ratings yet
- REVISTA Wurtec CatalogDocument216 pagesREVISTA Wurtec CatalogxpNo ratings yet