You might also like
- Ace Quant 3rd Edition by Adda247.pdf - WatermarkDocument249 pagesAce Quant 3rd Edition by Adda247.pdf - WatermarkVikey gopeNo ratings yet
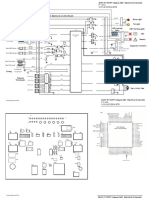
- R1150RT IABS Electric Diagram V1.0Document3 pagesR1150RT IABS Electric Diagram V1.0Zeljko Tanasic50% (2)
- All in One Selenium CheatsheetDocument6 pagesAll in One Selenium CheatsheetDEAR KANNANo ratings yet
- Problems and Solutions To Smith/Hashemi 4/e (Chapter 11)Document34 pagesProblems and Solutions To Smith/Hashemi 4/e (Chapter 11)pagonde8350% (2)
- Simulink TutorialDocument51 pagesSimulink TutorialAli AhmadNo ratings yet
- O'Connor - Matlab's Floating Point SystemDocument17 pagesO'Connor - Matlab's Floating Point SystemDerek O'ConnorNo ratings yet
- Lab 3Document5 pagesLab 3SYED HAMZA WAJIDNo ratings yet
- Nonlinear Programming 4: Proceedings of the Nonlinear Programming Symposium 4 Conducted by the Computer Sciences Department at the University of Wisconsin–Madison, July 14-16, 1980From EverandNonlinear Programming 4: Proceedings of the Nonlinear Programming Symposium 4 Conducted by the Computer Sciences Department at the University of Wisconsin–Madison, July 14-16, 1980Olvi L. MangasarianNo ratings yet
- Introduction To Naval Architecture GillmerDocument338 pagesIntroduction To Naval Architecture GillmerRenato Ramos100% (3)
- Compound CylinderDocument11 pagesCompound CylinderLiliana Ara GubanNo ratings yet
- LeastSquares Fit in MatlabDocument64 pagesLeastSquares Fit in MatlabJohn GkanatsiosNo ratings yet
- Falkner SkanDocument16 pagesFalkner SkanBenedict EgboiyiNo ratings yet
- Matlab - Slides - Lecture 5 + SolDocument21 pagesMatlab - Slides - Lecture 5 + SolKtk ZadNo ratings yet
- Redux Documentation 2017-10-11Document244 pagesRedux Documentation 2017-10-11Essidik EddoukaliNo ratings yet
- Topological Sort in DelphiDocument8 pagesTopological Sort in DelphiBrummerNo ratings yet
- App Inventor Tutorials and Examples - Dynamic Table Layout - Pura Vida Apps PDFDocument4 pagesApp Inventor Tutorials and Examples - Dynamic Table Layout - Pura Vida Apps PDFAdewale RajiNo ratings yet
- C Code Generation For A MATLAB Kalman Filtering Algorithm - MATLAB & Simulink Example - MathWorks IndiaDocument8 pagesC Code Generation For A MATLAB Kalman Filtering Algorithm - MATLAB & Simulink Example - MathWorks IndiasureshNo ratings yet
- Getting Started OPENSEES PDFDocument15 pagesGetting Started OPENSEES PDFAngela WoodNo ratings yet
- 8 File Handling in C'Document7 pages8 File Handling in C'api-372813683% (6)
- Fourier Series LessonDocument41 pagesFourier Series Lessonjackson246No ratings yet
- Introduction To GUI Development Using QT: Paolo Quadrani Andrea NegriDocument53 pagesIntroduction To GUI Development Using QT: Paolo Quadrani Andrea NegrieliaezekielNo ratings yet
- Flowcode Introductory Course PDFDocument12 pagesFlowcode Introductory Course PDFmawunyoNo ratings yet
- OpenCV With QTDocument5 pagesOpenCV With QTAdila Syifa MahfudzNo ratings yet
- C++ Fem Object OrientedDocument17 pagesC++ Fem Object OrientedTuýp Phờ NờNo ratings yet
- Introduction To Matlab SimulinkDocument45 pagesIntroduction To Matlab SimulinkSami KasawatNo ratings yet
- The Inventor MentorDocument271 pagesThe Inventor MentorΑρετή ΣταματούρουNo ratings yet
- Matlab Programming Assignment 2014 Civil EngineeringDocument9 pagesMatlab Programming Assignment 2014 Civil EngineeringPayel DuttaNo ratings yet
- Integrating QT and OpenGLDocument39 pagesIntegrating QT and OpenGLVinayKumarNo ratings yet
- KLE Technological University Hubballi: A Minor Project Report OnDocument18 pagesKLE Technological University Hubballi: A Minor Project Report Onchannaveer kalaseNo ratings yet
- V-REP Quick User ManualDocument16 pagesV-REP Quick User Manualgfrutoss100% (1)
- What Is MatlabDocument5 pagesWhat Is Matlabyash143565No ratings yet
- Animation: I Am Vishal Kumar Tiwari - Web Designer (Trainee) HiDocument12 pagesAnimation: I Am Vishal Kumar Tiwari - Web Designer (Trainee) HiVishalkumartiwari …No ratings yet
- Learn Image Processing With OpenCV and QT For BeginnersDocument8 pagesLearn Image Processing With OpenCV and QT For BeginnersHameem C HamzaNo ratings yet
- OpenSees Workshop04Document52 pagesOpenSees Workshop04james_frankNo ratings yet
- Numerical Computing With IEEE Floating Point Arithmetic - Michael L OVERTON - 2001 - SIAMDocument121 pagesNumerical Computing With IEEE Floating Point Arithmetic - Michael L OVERTON - 2001 - SIAMYermakov Vadim IvanovichNo ratings yet
- A Free MATLAB Alternative Called OctaveDocument6 pagesA Free MATLAB Alternative Called OctavemivanoNo ratings yet
- Cs-101: Computer Systems: Introduction To Programming Using MatlabDocument60 pagesCs-101: Computer Systems: Introduction To Programming Using MatlabnicksoldenNo ratings yet
- SimulinkDocument20 pagesSimulinkEren Tutar100% (1)
- Bairstow MethodDocument7 pagesBairstow MethodBrajendra SinghNo ratings yet
- AnimejsDocument27 pagesAnimejsJesus RodriguezNo ratings yet
- Best Practise BackboneJSDocument5 pagesBest Practise BackboneJSNhut PhanNo ratings yet
- QT Designer WidgetsDocument128 pagesQT Designer WidgetsTadeu FelixNo ratings yet
- Tutorial of The Bond GraphDocument22 pagesTutorial of The Bond Graphsf111No ratings yet
- CheatSheet C# Vs VBdoc PDFDocument16 pagesCheatSheet C# Vs VBdoc PDFRastateNo ratings yet
- Matlab Simulink IntroDocument14 pagesMatlab Simulink IntrobdeepeshNo ratings yet
- Matlab Database Tool BoxDocument5 pagesMatlab Database Tool BoxI am legendNo ratings yet
- Motor DC 1Document40 pagesMotor DC 1anderelelectronicNo ratings yet
- Dspaceinsimulink PDFDocument20 pagesDspaceinsimulink PDFmphaniteja2012No ratings yet
- Connecting Matlab With OpenFOAM JPDocument17 pagesConnecting Matlab With OpenFOAM JPSomdeb BandopadhyayNo ratings yet
- Selenium Class Notes 13 AUGDocument30 pagesSelenium Class Notes 13 AUGkuldeepNo ratings yet
- Advanced CSS Techniques: Presenter: Jon KinneyDocument29 pagesAdvanced CSS Techniques: Presenter: Jon KinneyApril Anne MaguadNo ratings yet
- Pytest PDFDocument320 pagesPytest PDFDhrubajyoti SadhuNo ratings yet
- Mathworks Matlab7 - Toolbox - System Identification Toolbox User's GuideDocument566 pagesMathworks Matlab7 - Toolbox - System Identification Toolbox User's Guideturgaykale100% (1)
- Basilisk TutorialDocument12 pagesBasilisk TutorialPrateek0% (1)
- FEM Matlab ProgramDocument4 pagesFEM Matlab ProgramleaNo ratings yet
- RBFN Xor ProblemDocument16 pagesRBFN Xor ProblemCory SparksNo ratings yet
- PyramidDocument791 pagesPyramidSanisa ClaraNo ratings yet
- Modeling of Two Wheel Balancing RobotDocument7 pagesModeling of Two Wheel Balancing RobotAbdullah AhmedNo ratings yet
- C PRGRMNG MCQ PDFDocument164 pagesC PRGRMNG MCQ PDFMugdha KaleNo ratings yet
- Mathematical Programming: Proceedings of an Advanced Seminar Conducted by the Mathematics Research Center, the University of Wisconsin, and the U. S. Army at Madison, September 11-13, 1972From EverandMathematical Programming: Proceedings of an Advanced Seminar Conducted by the Mathematics Research Center, the University of Wisconsin, and the U. S. Army at Madison, September 11-13, 1972No ratings yet
- Differential Quadrature and Differential Quadrature Based Element Methods: Theory and ApplicationsFrom EverandDifferential Quadrature and Differential Quadrature Based Element Methods: Theory and ApplicationsNo ratings yet
- Modern Web Applications with Next.JS: Learn Advanced Techniques to Build and Deploy Modern, Scalable and Production Ready React Applications with Next.JSFrom EverandModern Web Applications with Next.JS: Learn Advanced Techniques to Build and Deploy Modern, Scalable and Production Ready React Applications with Next.JSNo ratings yet
- Digiital TwinDocument13 pagesDigiital TwinPranay RawatNo ratings yet
- Set T6 Final-With-Key AnswerDocument29 pagesSet T6 Final-With-Key AnswerHh HhNo ratings yet
- Location and Water Surface Profile of Hydraulic Jump On A SlopingDocument8 pagesLocation and Water Surface Profile of Hydraulic Jump On A Slopingناهض عهد عبد المحسن ناهض100% (1)
- Mec 201 04 Aug 20Document18 pagesMec 201 04 Aug 20hemanth singhNo ratings yet
- Description Features: Ltc5598 5Mhz To 1600Mhz High Linearity Direct Quadrature ModulatorDocument16 pagesDescription Features: Ltc5598 5Mhz To 1600Mhz High Linearity Direct Quadrature ModulatorMarcos CervettoNo ratings yet
- Notes On Computer Networks Unit1Document14 pagesNotes On Computer Networks Unit1Rohit Chaudhary100% (4)
- Nexthink V6.29 GlossaryAndReferencesDocument273 pagesNexthink V6.29 GlossaryAndReferencesSajuNo ratings yet
- OtotoxicosDocument7 pagesOtotoxicosHenrique Vilas BoasNo ratings yet
- RHEP-Hydraulics of Diversion TunnelDocument10 pagesRHEP-Hydraulics of Diversion Tunneljp444No ratings yet
- CHAPTER 4 Financial AspectDocument18 pagesCHAPTER 4 Financial AspectShan ShanNo ratings yet
- Bajaj Home ComfortDocument30 pagesBajaj Home ComfortShabbir WahabNo ratings yet
- The K-Armed Dueling Bandits ProblemDocument33 pagesThe K-Armed Dueling Bandits Problemtvboxsmart newNo ratings yet
- Scrum Gantt Chart With BurndownDocument4 pagesScrum Gantt Chart With BurndownAsma Afreen ChowdaryNo ratings yet
- Operating SystemDocument9 pagesOperating SystemappleNo ratings yet
- Math - Week 01 HomeworkDocument9 pagesMath - Week 01 Homeworkapi-259999268No ratings yet
- Lesson 7 Kinetics of Curvilinear Translation, Dynamic EquilibriumDocument6 pagesLesson 7 Kinetics of Curvilinear Translation, Dynamic EquilibriumNadjer C. AdamNo ratings yet
- Rollover in Gas CarrierDocument3 pagesRollover in Gas CarrierTuhin Kumar DevNo ratings yet
- 7th Bay Area Mathematical Olympiad: Problems and SolutionsDocument6 pages7th Bay Area Mathematical Olympiad: Problems and Solutionsgidea1georgeNo ratings yet
- 2.format - Eng-Evaluation of Novaluron 5.25 % + Emamectin Benzoate 0.9% SC Against Chilli Fruit BorersDocument8 pages2.format - Eng-Evaluation of Novaluron 5.25 % + Emamectin Benzoate 0.9% SC Against Chilli Fruit BorersImpact JournalsNo ratings yet
- DL360 G4Document42 pagesDL360 G4tarariNo ratings yet
- 3740.2480.1. Planning & Evaluating Front Office OperationsDocument12 pages3740.2480.1. Planning & Evaluating Front Office OperationsAshutosh SinghNo ratings yet
- The Impact of Ammonia Fuel On Marine Engine Lubrication An Artificial Lubricant Ageing ApproachDocument16 pagesThe Impact of Ammonia Fuel On Marine Engine Lubrication An Artificial Lubricant Ageing ApproachJicheng PiaoNo ratings yet
- Gtu PaperDocument20 pagesGtu PaperDaksh DalalNo ratings yet
- Causes of Casting Defects With RemediesDocument6 pagesCauses of Casting Defects With RemediesKavita KaleNo ratings yet
- Weir SPM General Catalog (0509)Document40 pagesWeir SPM General Catalog (0509)Greg Anderson100% (2)
- 1 ENSC 102L - Module-I (Activity 1-LA#1)Document9 pages1 ENSC 102L - Module-I (Activity 1-LA#1)Ciane PattyNo ratings yet