You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Health and Safety Plan TranslationDocument17 pagesHealth and Safety Plan TranslationEvaristo MudenderNo ratings yet
- Developmental Screening Using The: Philippine Early Childhood Development ChecklistDocument30 pagesDevelopmental Screening Using The: Philippine Early Childhood Development ChecklistGene BonBonNo ratings yet
- Knowing God Intimately Joyce Meyer Christiandiet - Com .NGDocument343 pagesKnowing God Intimately Joyce Meyer Christiandiet - Com .NGadriana mariaNo ratings yet
- Assurance Question Bank 2013 PDFDocument168 pagesAssurance Question Bank 2013 PDFIan RelacionNo ratings yet
- Nutrition and Diet Therapy 12Th Edition Roth Solutions Manual Full Chapter PDFDocument30 pagesNutrition and Diet Therapy 12Th Edition Roth Solutions Manual Full Chapter PDFgretchenmilesdxeh3100% (8)
- Prueba Final Inglres Robert PalaciosDocument2 pagesPrueba Final Inglres Robert PalaciosCarlos GuerreroNo ratings yet
- Math TestDocument3 pagesMath TestGhalyanAtulNo ratings yet
- CDC121 Weekly Schedule Spring 2017 RidDocument5 pagesCDC121 Weekly Schedule Spring 2017 RidAnonymous x1Lu4qE623No ratings yet
- Research Methodology: by Asaye Gebrewold (PHD Candidate)Document17 pagesResearch Methodology: by Asaye Gebrewold (PHD Candidate)natnael haileNo ratings yet
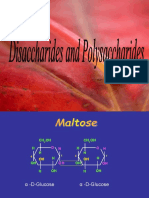
- Disaccharides and PolysaccharidesDocument17 pagesDisaccharides and PolysaccharidesAarthi shreeNo ratings yet
- Albemarle Family YMCA Pool ScheduleDocument2 pagesAlbemarle Family YMCA Pool ScheduleYMCA of South Hampton RoadsNo ratings yet
- Session 7 Valuation of ITC Using DDMDocument24 pagesSession 7 Valuation of ITC Using DDMSnehil BajpaiNo ratings yet
- Key Responsibilities On Skill.: Curriculum Vitae PersonalDocument3 pagesKey Responsibilities On Skill.: Curriculum Vitae PersonalLAM NYAWALNo ratings yet
- Early Daoist Dietary Practices: Examining Ways To Health and Longevity. by Shawn ArthurDocument6 pagesEarly Daoist Dietary Practices: Examining Ways To Health and Longevity. by Shawn ArthurlsdkNo ratings yet
- Final MTech ProjectDocument30 pagesFinal MTech ProjectArunSharmaNo ratings yet
- Slip-System Cal PDFDocument13 pagesSlip-System Cal PDFVanaja JadapalliNo ratings yet
- D820-93 (2009) Standard Test Methods For ChemicalDocument10 pagesD820-93 (2009) Standard Test Methods For Chemicalobis8053No ratings yet
- Soften, Soothe, AllowDocument1 pageSoften, Soothe, AllowTatiannaMartinsNo ratings yet
- Kawai MP7 Owner's ManualDocument148 pagesKawai MP7 Owner's ManualMiloNo ratings yet
- Civil Engineering Softwares and Their ImplementationsDocument13 pagesCivil Engineering Softwares and Their ImplementationsADITYANo ratings yet
- Research Day AbstractsDocument287 pagesResearch Day AbstractsStoriesofsuperheroesNo ratings yet
- EngM6 TB WebDocument161 pagesEngM6 TB WebNong BillNo ratings yet
- Programme EnergyDocument9 pagesProgramme EnergyAbdulazizNo ratings yet
- Dental Materials Store2 PDFDocument20 pagesDental Materials Store2 PDFMalaz MemoNo ratings yet
- Article On Globalization in Nepal and Its OppotunitiesDocument6 pagesArticle On Globalization in Nepal and Its OppotunitiesReema KhatryNo ratings yet
- How to introduce yourself in 60 secondsDocument15 pagesHow to introduce yourself in 60 secondsJaneGuinumtadNo ratings yet
- TB170LSDocument4 pagesTB170LSDary ArroyoNo ratings yet
- China VS1-24 Series Indoor High Voltage Vacuum Circuit Breaker Factory and Manufacturers - GhoritDocument6 pagesChina VS1-24 Series Indoor High Voltage Vacuum Circuit Breaker Factory and Manufacturers - GhoritKalidass BackNo ratings yet
- Ruibal & Shoemaker 1984 - Osteoders in AnuransDocument17 pagesRuibal & Shoemaker 1984 - Osteoders in AnuransRuivo LucasNo ratings yet