You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5819)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (845)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- Bill November 2021 UnlockedDocument2 pagesBill November 2021 UnlockedAngel Ramírez100% (1)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Using Arduino With Matlab and Simulink PDFDocument15 pagesUsing Arduino With Matlab and Simulink PDFPrem KumarNo ratings yet
- Selection of Switchyard EquipmentDocument64 pagesSelection of Switchyard EquipmentKunzes Dolkar100% (3)
- Conclusion: InferenceDocument4 pagesConclusion: InferencePrem KumarNo ratings yet
- Co DesignDocument18 pagesCo DesignPrem KumarNo ratings yet
- 4 - Types of DC Chopper PDFDocument38 pages4 - Types of DC Chopper PDFPrem KumarNo ratings yet
- Chapter 4Document50 pagesChapter 4Prem KumarNo ratings yet
- Cognitive Psychology PDFDocument30 pagesCognitive Psychology PDFPrem KumarNo ratings yet
- Speed Control of Brushless DC Motor: Three Phase Voltage Source InverterDocument1 pageSpeed Control of Brushless DC Motor: Three Phase Voltage Source InverterPrem KumarNo ratings yet
- Chapter 2Document41 pagesChapter 2Prem KumarNo ratings yet
- Resonant Frequency Andfrequency Response of A RLC Circuit: X X R ZDocument5 pagesResonant Frequency Andfrequency Response of A RLC Circuit: X X R ZPrem KumarNo ratings yet
- CKT Mesh AnalysisDocument3 pagesCKT Mesh AnalysisPrem KumarNo ratings yet
- Apparatus Required:-: Frequency Response of Parallel Resonance CircuitDocument3 pagesApparatus Required:-: Frequency Response of Parallel Resonance CircuitPrem KumarNo ratings yet
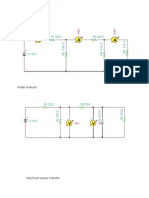
- Name of The Component Range Type Quantity: Aim: Maximum Power TransferDocument3 pagesName of The Component Range Type Quantity: Aim: Maximum Power TransferPrem KumarNo ratings yet
- PHYSICS MEASUREMENT FORCE MOMENT MOMENTUM - DiscussionDocument19 pagesPHYSICS MEASUREMENT FORCE MOMENT MOMENTUM - DiscussionfebrianaNo ratings yet
- Generador Eolico Black 600Document19 pagesGenerador Eolico Black 600HENRYNo ratings yet
- Current Status of Renewable Energy Sector in Bangladesh and A Proposed Grid Connected Hybrid Renewable Energy SystemDocument11 pagesCurrent Status of Renewable Energy Sector in Bangladesh and A Proposed Grid Connected Hybrid Renewable Energy Systemfahim asifNo ratings yet
- Energies: CO Utilization Technologies: A Techno-Economic Analysis For Synthetic Natural Gas ProductionDocument18 pagesEnergies: CO Utilization Technologies: A Techno-Economic Analysis For Synthetic Natural Gas Productionayiep1202No ratings yet
- Handling Precautions: Butterfly Valves (Common To All Models)Document9 pagesHandling Precautions: Butterfly Valves (Common To All Models)xaaabbb_550464353No ratings yet
- Development Needs Sustainable Energy: BMZ Topics 187Document43 pagesDevelopment Needs Sustainable Energy: BMZ Topics 187Taha HashmiNo ratings yet
- Home Energy Audit DiyDocument24 pagesHome Energy Audit DiyStewart7000No ratings yet
- Demand Factor-Diversity Factor-Utilization Factor-Load FactorDocument18 pagesDemand Factor-Diversity Factor-Utilization Factor-Load FactorHimdad Tahir100% (2)
- Design and Simulation of Solar Devices For Satellite Based Applications Using COMSOLDocument6 pagesDesign and Simulation of Solar Devices For Satellite Based Applications Using COMSOLTithiNo ratings yet
- GP Individual ReportDocument2 pagesGP Individual ReportRanveer Anand100% (1)
- Design of A Compact Winding For An Axial-Flux Permanent-Magnet Brushless DC Motor Used in An Electric Two-WheelerDocument3 pagesDesign of A Compact Winding For An Axial-Flux Permanent-Magnet Brushless DC Motor Used in An Electric Two-WheelerhooshyarNo ratings yet
- Submitted To: Dr. Anjum Khalid Submitted By: Arsalan Altaf Roll No: Me-023 Sec: A Batch: 2007-08 Department: MechanicalDocument14 pagesSubmitted To: Dr. Anjum Khalid Submitted By: Arsalan Altaf Roll No: Me-023 Sec: A Batch: 2007-08 Department: MechanicalArsalan AltafNo ratings yet
- VII SemDocument133 pagesVII SemUmesha G BNo ratings yet
- AcousticDocument4 pagesAcousticrs_sechiNo ratings yet
- Nema LG-2 - 1959Document15 pagesNema LG-2 - 1959ew6082No ratings yet
- Luminiare - BRP 392 LED 60 40 WattDocument2 pagesLuminiare - BRP 392 LED 60 40 WattNurul HidayahNo ratings yet
- E217.11 Current Transformer Type IOSKDocument8 pagesE217.11 Current Transformer Type IOSKandersson100% (2)
- "Design Development & Performance Assessments of New Solar Concentrator System: Cross Linear CSP (CL-CSPDocument208 pages"Design Development & Performance Assessments of New Solar Concentrator System: Cross Linear CSP (CL-CSPNAVEEN ROY0% (1)
- Data SheetDocument2 pagesData SheetLuke Mayta ParedesNo ratings yet
- Convertion KW To MvaDocument1 pageConvertion KW To MvavistalmarlonNo ratings yet
- Sentry Sampling ComponentsDocument60 pagesSentry Sampling Componentsnagaraj108100% (3)
- Off The Grid Independent Energy ProductionDocument31 pagesOff The Grid Independent Energy ProductionMoreMoseySpeedNo ratings yet
- Demand Factor-Diversity Factor-Utilization Factor-Load FactorDocument11 pagesDemand Factor-Diversity Factor-Utilization Factor-Load FactorGeovany Mena VillagraNo ratings yet
- 057 2015 en GL ThermalPower WEBDocument16 pages057 2015 en GL ThermalPower WEBmisthahNo ratings yet
- Stud Tom Van Diessen Development Solar Home SystemDocument100 pagesStud Tom Van Diessen Development Solar Home Systemkm11kartalNo ratings yet
- 10 Operating Instruction 247 PDFDocument56 pages10 Operating Instruction 247 PDFkaraganda38No ratings yet
- Reading AssignmentDocument2 pagesReading AssignmentJohn Fredrick AvellanaNo ratings yet