You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5819)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (845)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- GMDSS Handbook PDFDocument111 pagesGMDSS Handbook PDFKharl Shem RigonanNo ratings yet
- By Jenny JarzabskiDocument68 pagesBy Jenny Jarzabskidump dumperson100% (2)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Theoretical and Conceptual Frameworks For Understanding Adolescent Problem BehaviorDocument13 pagesTheoretical and Conceptual Frameworks For Understanding Adolescent Problem BehaviorriganNo ratings yet
- Grammar: IeltsDocument294 pagesGrammar: IeltsHà Trần100% (2)
- ssc201 Lecture Note-1Document62 pagesssc201 Lecture Note-1Adebayo OmojuwaNo ratings yet
- Machining of Composites PPT2Document10 pagesMachining of Composites PPT2Arshi ChorghayNo ratings yet
- Pneumatic StructuresDocument28 pagesPneumatic StructuresAbhi Nand100% (1)
- Digital Designs Catalog: True Type FontsDocument20 pagesDigital Designs Catalog: True Type FontsDavid Eduardo Guerra Guerra100% (1)
- Effects of Occupational Health and Safety Culture On Employees' Performance at Agility International LTD., Semarang BranchDocument16 pagesEffects of Occupational Health and Safety Culture On Employees' Performance at Agility International LTD., Semarang BranchAndi Indah MagefirahNo ratings yet
- Cow Manure: An Alternative Source of Biogas: A Quantitative Research Presented ToDocument63 pagesCow Manure: An Alternative Source of Biogas: A Quantitative Research Presented ToKishaMarieLayderosNo ratings yet
- CD47-C USER GUIDE - 06 APR 2016 - EmailDocument60 pagesCD47-C USER GUIDE - 06 APR 2016 - EmailRakesh KannurNo ratings yet
- Exploration of Urbanization in PakistanDocument8 pagesExploration of Urbanization in PakistanCharles Kyalo NyamaiNo ratings yet
- Myo Min Oo (EMBA - 39)Document66 pagesMyo Min Oo (EMBA - 39)vikudo1714No ratings yet
- Relieve Valve Types and OperationDocument11 pagesRelieve Valve Types and OperationBryan K. Aylas ParedesNo ratings yet
- Kak Bahasa Inggeris THN 1 - 6Document4 pagesKak Bahasa Inggeris THN 1 - 6Sea HunterNo ratings yet
- Examen Práctico Oposición Inglés Secundaria Murcia 2018Document6 pagesExamen Práctico Oposición Inglés Secundaria Murcia 2018JonNo ratings yet
- En SATA Catalog Product Catalogue 2023 221205 241786 Uid 63e126bf522efDocument164 pagesEn SATA Catalog Product Catalogue 2023 221205 241786 Uid 63e126bf522efTaufan JustvandsNo ratings yet
- Component Detail Report 3288Document2 pagesComponent Detail Report 3288Богдан РудюкNo ratings yet
- Ejercicios de Deducción Natural Buena PDFDocument6 pagesEjercicios de Deducción Natural Buena PDFFernando IsabalNo ratings yet
- Saq Officer SitesDocument10 pagesSaq Officer SitesGemalyn NacarioNo ratings yet
- GCR Rankings 2014-2015Document1 pageGCR Rankings 2014-2015Omer Waheed QureshiNo ratings yet
- Journal of AgEng Research 1998Document10 pagesJournal of AgEng Research 1998Caesar Joventino TadoNo ratings yet
- Meanings of Pragmatism: Ways To Conduct Information Systems ResearchDocument15 pagesMeanings of Pragmatism: Ways To Conduct Information Systems ResearchliliaNo ratings yet
- Vietnam Telecommunications ReportDocument41 pagesVietnam Telecommunications ReportQuoc Tuan TranNo ratings yet
- MGT3306Document8 pagesMGT3306Alex ZhangNo ratings yet
- Đề Thi Thử THPT 2021 - Tiếng Anh - GV Vũ Thị Mai Phương - Đề 4 - Có Lời GiảiDocument16 pagesĐề Thi Thử THPT 2021 - Tiếng Anh - GV Vũ Thị Mai Phương - Đề 4 - Có Lời GiảiThảo MyNo ratings yet
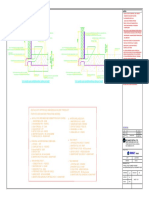
- Toilet Sunken or Raised Waterproofing Detail - Smart PointDocument1 pageToilet Sunken or Raised Waterproofing Detail - Smart Pointajay kumarNo ratings yet
- Telecom Products NTFDocument170 pagesTelecom Products NTFKam BakaneNo ratings yet
- Acts of Teaching Chapter 14Document2 pagesActs of Teaching Chapter 14api-350726106No ratings yet
- PIP STS02380, Application of ACI336.1-01 Specification For The Construction of Drilled PiersDocument9 pagesPIP STS02380, Application of ACI336.1-01 Specification For The Construction of Drilled PiersErik PerezNo ratings yet