You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (844)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5810)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- ISA 84 - The Standard For Safety Instrumented SystemsDocument9 pagesISA 84 - The Standard For Safety Instrumented Systemssina20795No ratings yet
- 01 SCADA System OverviewDocument35 pages01 SCADA System OverviewpurnawanNo ratings yet
- Pub1564webNew 74666420Document710 pagesPub1564webNew 74666420Anonymous CuGs3teY100% (2)
- Group2SADProposal Super Final Revised 1Document93 pagesGroup2SADProposal Super Final Revised 1AzeruxNo ratings yet
- DS24 Affiliate Success Guide 1Document8 pagesDS24 Affiliate Success Guide 1LoganayakiNo ratings yet
- Overview of Brand Planning ProcessDocument42 pagesOverview of Brand Planning Processrusuclaudiu1988No ratings yet
- Métodos de Investigación - UnedDocument5 pagesMétodos de Investigación - UnedEsther ZaldívarNo ratings yet
- Iit Ashram: Class: 10 GSEB: FULL TEST-1 MathematicsDocument4 pagesIit Ashram: Class: 10 GSEB: FULL TEST-1 MathematicsRutvik SenjaliyaNo ratings yet
- Net GraphDocument1 pageNet Graphrayarayo11No ratings yet
- Function of Trigonometric Functions PBLDocument28 pagesFunction of Trigonometric Functions PBLRic Joseph MurilloNo ratings yet
- Textbook Introduction To Java Programming and Data Structures Comprehensive Version Y Daniel Liang Ebook All Chapter PDFDocument42 pagesTextbook Introduction To Java Programming and Data Structures Comprehensive Version Y Daniel Liang Ebook All Chapter PDFrobert.alexander777100% (9)
- m57 SMSC Datasheet PDFDocument5 pagesm57 SMSC Datasheet PDFsrboghe651665No ratings yet
- WS-E10 / WSD-E11: Intrinsically Safe Wireless AnemometerDocument4 pagesWS-E10 / WSD-E11: Intrinsically Safe Wireless AnemometerOlimpiu StoicutaNo ratings yet
- JBL Sub 136Document12 pagesJBL Sub 136eliu.tec.iotNo ratings yet
- Pakistan Electric LabDocument8 pagesPakistan Electric LabMuhammad Nouman KhanNo ratings yet
- Custom SQL Query For ASA DB (OpsCenter) To Generate Monthly Success Rate - Symantec Connect CommunityDocument6 pagesCustom SQL Query For ASA DB (OpsCenter) To Generate Monthly Success Rate - Symantec Connect CommunityManuel Alvarez-Ossorio GarciaNo ratings yet
- WiLAN 1999 Annual ReportDocument49 pagesWiLAN 1999 Annual ReportHatim ZaghloulNo ratings yet
- PlantPAX Guia PDFDocument48 pagesPlantPAX Guia PDFMaricruz OlivarNo ratings yet
- The Role of Digital Financial Inclusion On Promoting Sustainable Economic Growth Through Banking Stability: Evidence From BangladeshDocument19 pagesThe Role of Digital Financial Inclusion On Promoting Sustainable Economic Growth Through Banking Stability: Evidence From BangladesholjiragedaNo ratings yet
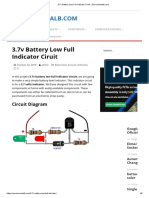
- 3.7v Battery Low Full Indicator CiruitDocument6 pages3.7v Battery Low Full Indicator CiruitPaulo henrique frigeriNo ratings yet
- Topic: Matrix Addition and SubtractionDocument6 pagesTopic: Matrix Addition and SubtractionAnonyNo ratings yet
- 6752 To 6735Document10 pages6752 To 6735Christian Asher OliveriaNo ratings yet
- HCIqDocument78 pagesHCIqOanh NguyenNo ratings yet
- Get All Alfresco Tags With CMIS - StackDocument4 pagesGet All Alfresco Tags With CMIS - StackpmrreddyNo ratings yet
- TorrcDocument3 pagesTorrcAndrés FernandezNo ratings yet
- Intel's Study CaseDocument8 pagesIntel's Study CaseAntony DPNo ratings yet
- What Is The Period Close Process For Oracle Assets in Release 12Document2 pagesWhat Is The Period Close Process For Oracle Assets in Release 12OracleERPNo ratings yet
- Presentation1 BEPDocument26 pagesPresentation1 BEPMohammed MakledNo ratings yet
- Lumber DNT IP Square NEW IB 3th June 2010aDocument47 pagesLumber DNT IP Square NEW IB 3th June 2010aGiovanniTurraNo ratings yet
- OpendtectDocument386 pagesOpendtectMaurício MatosNo ratings yet