You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5806)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (842)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (589)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Study of Heat Transfer Coefficient in A Double Pipe Heat ExchangerDocument22 pagesStudy of Heat Transfer Coefficient in A Double Pipe Heat Exchangermahbub13320% (1)
- Green New Deal FAQDocument6 pagesGreen New Deal FAQScott Johnson90% (51)
- Practical Solutions To Machinery and Maintenance Vibration Problems Chapter 7, Misalignment Section 4, Machinery Soft FeetDocument2 pagesPractical Solutions To Machinery and Maintenance Vibration Problems Chapter 7, Misalignment Section 4, Machinery Soft FeetHatem AbdelrahmanNo ratings yet
- The Magnetic Center Finding Using Vibrating Wire TechniqueDocument6 pagesThe Magnetic Center Finding Using Vibrating Wire TechniqueHatem AbdelrahmanNo ratings yet
- WEG HGF Low and High Voltage High Performance Electric Motor Range Broa017 Brochure EnglishDocument40 pagesWEG HGF Low and High Voltage High Performance Electric Motor Range Broa017 Brochure EnglishHatem AbdelrahmanNo ratings yet
- Don't Get Soft: Cover Series: Installation Best PracticesDocument6 pagesDon't Get Soft: Cover Series: Installation Best PracticesHatem Abdelrahman100% (1)
- Fault Zone - : Air GapDocument0 pagesFault Zone - : Air GapHatem AbdelrahmanNo ratings yet
- Kingsbury Leg ComponentsDocument3 pagesKingsbury Leg ComponentsHatem Abdelrahman100% (1)
- Customer Application Centers: Global Accessibility To Our TechnologyDocument1 pageCustomer Application Centers: Global Accessibility To Our TechnologyHatem AbdelrahmanNo ratings yet
- Best Practices: Asset Condition ManagementDocument2 pagesBest Practices: Asset Condition ManagementHatem AbdelrahmanNo ratings yet
- Why Upgrades Are Important - : Some Lessons Learned With Older Monitoring SystemsDocument2 pagesWhy Upgrades Are Important - : Some Lessons Learned With Older Monitoring SystemsHatem AbdelrahmanNo ratings yet
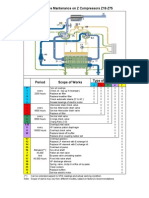
- Preventive Mantenance On Z Compressors Z18-Z75: Take All ReadingsDocument1 pagePreventive Mantenance On Z Compressors Z18-Z75: Take All ReadingsHatem AbdelrahmanNo ratings yet
- IBERDROLA's Center For Monitoring, Diagnostic and Simulation (CMDS) of Combined-Cycle Power PlantsDocument4 pagesIBERDROLA's Center For Monitoring, Diagnostic and Simulation (CMDS) of Combined-Cycle Power PlantsHatem AbdelrahmanNo ratings yet
- 2 Q 01 HanifanDocument2 pages2 Q 01 HanifanHatem AbdelrahmanNo ratings yet
- Ontario Power Generation's Nanticoke Power PlantDocument3 pagesOntario Power Generation's Nanticoke Power PlantHatem AbdelrahmanNo ratings yet
- Helping You ... : Fourth Quarter 1999 Vol. 20 No. 4Document1 pageHelping You ... : Fourth Quarter 1999 Vol. 20 No. 4Hatem AbdelrahmanNo ratings yet
- Payback Profile:: Suncor Uses Bently Nevada To Increase Profitability - Part 2Document6 pagesPayback Profile:: Suncor Uses Bently Nevada To Increase Profitability - Part 2Hatem AbdelrahmanNo ratings yet
- Simatic S7-300Document248 pagesSimatic S7-300denilson.rodr1357100% (1)
- Worked Examples CompositebeamDocument9 pagesWorked Examples Compositebeamthongchai_007No ratings yet
- Fire Safety of Concrete Structures:: Background To BS 8110 Fire DesignDocument47 pagesFire Safety of Concrete Structures:: Background To BS 8110 Fire DesigntorNo ratings yet
- HydrologyDocument72 pagesHydrologyAyuni AzizNo ratings yet
- Tarun KantDocument3 pagesTarun KantSarvagaya MadhwalNo ratings yet
- Three-Dimensional Stress Distribution Around A Dental Implant at Different StagesDocument6 pagesThree-Dimensional Stress Distribution Around A Dental Implant at Different StagesPrashanth MarkaNo ratings yet
- Pomsies Instruction User ManualDocument2 pagesPomsies Instruction User ManualsalguelaNo ratings yet
- Air International 2021-05Document100 pagesAir International 2021-05Kouda HamzaNo ratings yet
- Internship Report On CATIADocument8 pagesInternship Report On CATIAManoja P RNo ratings yet
- ACDHUM EbrochureDocument4 pagesACDHUM EbrochureIan Harris ChandraNo ratings yet
- Dispersion Relation of Electromagnetic WavesDocument2 pagesDispersion Relation of Electromagnetic WavesFidel SouzaNo ratings yet
- Assignment 1Document2 pagesAssignment 1Harry WillsmithNo ratings yet
- Exercises For Writing Task 1: Collected by Zoe Vu Advanced IeltsDocument31 pagesExercises For Writing Task 1: Collected by Zoe Vu Advanced IeltsHoang LongNo ratings yet
- Chapter 8: African Civilizations, 1500 B.C.-A.D. 500: Section 1: Diverse Societies in AfricaDocument4 pagesChapter 8: African Civilizations, 1500 B.C.-A.D. 500: Section 1: Diverse Societies in Africaalberto diezNo ratings yet
- Osteosarcoma and Its Variants Compressed PowerpointDocument126 pagesOsteosarcoma and Its Variants Compressed PowerpointSehrish SiddiqueNo ratings yet
- INSECTS (Cockroah)Document27 pagesINSECTS (Cockroah)atosabah9No ratings yet
- G. Vrbová (Auth.), Professor Dr. W. A. Nix, Professor Dr. G. Vrbová (Eds.) - Electrical Stimulation and Neuromuscular Disorders-Springer-Verlag Berlin Heidelberg (1986)Document148 pagesG. Vrbová (Auth.), Professor Dr. W. A. Nix, Professor Dr. G. Vrbová (Eds.) - Electrical Stimulation and Neuromuscular Disorders-Springer-Verlag Berlin Heidelberg (1986)Harshavardhan SNo ratings yet
- Surface To Exosphere - : The Joint Air Power Competence Centre's Impact On Transformation 2005-2020Document6 pagesSurface To Exosphere - : The Joint Air Power Competence Centre's Impact On Transformation 2005-2020Eduardo WeiserNo ratings yet
- FM2TS Gateway DatasheetDocument2 pagesFM2TS Gateway DatasheetnjomoNo ratings yet
- Delta Solution For Energy Storage - SDocument19 pagesDelta Solution For Energy Storage - SkunkzNo ratings yet
- Project ProposalDocument6 pagesProject ProposalMuhammadNo ratings yet
- Adoption of Cloud Computing Model For Managing E-Banking System in Banking OrganizationsDocument9 pagesAdoption of Cloud Computing Model For Managing E-Banking System in Banking OrganizationsFADILINo ratings yet
- Patent Office: United StatesDocument2 pagesPatent Office: United StatesfebycholiebyNo ratings yet
- Oxy Acetylene EquipmentDocument4 pagesOxy Acetylene Equipmentmahsa tNo ratings yet
- Heat Transfer Enhancement For PCMThermal Energy Storagein Triplex Tube Heat ExchangerDocument31 pagesHeat Transfer Enhancement For PCMThermal Energy Storagein Triplex Tube Heat ExchangerLam DesmondNo ratings yet
- Cysticare Utipro Plus Urinary Infections 15 CapsulesDocument1 pageCysticare Utipro Plus Urinary Infections 15 CapsulesAnnapurna HirematNo ratings yet
- TMP0025U Products Accessories GuideDocument40 pagesTMP0025U Products Accessories GuideMajdi BelguithNo ratings yet
- Nf528t Rev.0Document1 pageNf528t Rev.0MZY Commercial EnterprisesNo ratings yet