You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5807)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (842)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (589)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- TRIA7500 Tot GB PDFDocument464 pagesTRIA7500 Tot GB PDFStefan Šegić100% (2)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Integral Calculus: John Rey M. Pacturanan, CE, MPDocument2 pagesIntegral Calculus: John Rey M. Pacturanan, CE, MPNathanielle AndreaNo ratings yet
- 12P6122DDocument4 pages12P6122DMalik HamzaNo ratings yet
- LLM Training UpdateDocument31 pagesLLM Training UpdateChao LvNo ratings yet
- Cs28a - DMRCDocument12 pagesCs28a - DMRCAbhishek PujariNo ratings yet
- M.SC Biotechnology AY 2018 19Document96 pagesM.SC Biotechnology AY 2018 19Shrikant PatilNo ratings yet
- Sdk-Windows Devguide en PDFDocument150 pagesSdk-Windows Devguide en PDFKeith McCannNo ratings yet
- Technique To Construct Trend Free FFD Using Some Linear CodesDocument25 pagesTechnique To Construct Trend Free FFD Using Some Linear CodesPuja ThapliyalNo ratings yet
- Eurocodes in Scia EngineerDocument2 pagesEurocodes in Scia EngineeradventmanurungNo ratings yet
- Name: Teacher: Date: Score:: Converting Between Percents, Decimals, and FractionsDocument2 pagesName: Teacher: Date: Score:: Converting Between Percents, Decimals, and FractionsValentina SidhartaNo ratings yet
- Volume3A Mech PDFDocument321 pagesVolume3A Mech PDFSayee Krishnan100% (1)
- Chapter 05Document75 pagesChapter 05mushtaque61No ratings yet
- DOKAFORMDocument8 pagesDOKAFORMpraupdNo ratings yet
- LM 78 L 05Document13 pagesLM 78 L 05f7erick-zn5No ratings yet
- Hitachi Manual - TS5K500.B OEM Specification R18Document176 pagesHitachi Manual - TS5K500.B OEM Specification R18Adrian ScripcaruNo ratings yet
- Instant Centers of Velocities: P. Nikravesh, AME, U of ADocument15 pagesInstant Centers of Velocities: P. Nikravesh, AME, U of ANguyen PhanNo ratings yet
- Donati - Instructions For Use and Maintenance DRH - English-CRYPDocument130 pagesDonati - Instructions For Use and Maintenance DRH - English-CRYPAnanthu UnnikrishnanNo ratings yet
- Apostila GgplotDocument59 pagesApostila GgplotBreno Benvindo Dos AnjosNo ratings yet
- Tututu TutuDocument12 pagesTututu Tutusantujai26No ratings yet
- Dae Cit-1 RevisedDocument57 pagesDae Cit-1 RevisedSaad AliNo ratings yet
- Polyvinyl Chloride (PVC) Pressure Fittings For Water - 4 In. Through 8 In. (100 MM THROUGH 200 MM)Document24 pagesPolyvinyl Chloride (PVC) Pressure Fittings For Water - 4 In. Through 8 In. (100 MM THROUGH 200 MM)Enrique R. Garcia G.No ratings yet
- Introduction To Charting & Technical Analysis in Bloomberg: A Step by Step GuideDocument45 pagesIntroduction To Charting & Technical Analysis in Bloomberg: A Step by Step GuideDiegoGarciaBermudezNo ratings yet
- Artcam Pro Tutorials EN ESPANOLDocument324 pagesArtcam Pro Tutorials EN ESPANOLemporionet33% (3)
- Discovering Computers 2010: Living in A Digital WorldDocument44 pagesDiscovering Computers 2010: Living in A Digital Worldnavin212No ratings yet
- (Jurnal) Energy-Optimal Adaptive Cruise Control Based On Model Predictive ControlDocument6 pages(Jurnal) Energy-Optimal Adaptive Cruise Control Based On Model Predictive ControlDark EngineNo ratings yet
- Lec 3Document8 pagesLec 3ummaraNo ratings yet
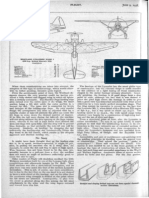
- Flight.: Westland Lysander MarkDocument1 pageFlight.: Westland Lysander Markseafire47No ratings yet
- Unit 1.1 - System of Coplanar ForcesDocument35 pagesUnit 1.1 - System of Coplanar ForcesRohan100% (2)
- Industrial AutomationDocument4 pagesIndustrial AutomationYogesh ChaudhariNo ratings yet
- A2 Prachi Apale Seminar ReportDocument17 pagesA2 Prachi Apale Seminar ReportTushar GulhaneNo ratings yet