You might also like
- Methods for Increasing the Quality and Reliability of Power System Using FACTS DevicesFrom EverandMethods for Increasing the Quality and Reliability of Power System Using FACTS DevicesNo ratings yet
- A Higher Level of Efficiency: Five-Level Frequency Converters For Medium VoltageDocument6 pagesA Higher Level of Efficiency: Five-Level Frequency Converters For Medium VoltageBalaji MbNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Doubly-Fed Induction Generator Control For Variable-Speed Wind Power Generation SystemDocument5 pagesDoubly-Fed Induction Generator Control For Variable-Speed Wind Power Generation SystemB Vijay VihariNo ratings yet
- Grid Interface of Wind PowerDocument34 pagesGrid Interface of Wind PowerM Paul PrasadNo ratings yet
- Variable Frequency Drives in A Power Plant: SynopsisDocument22 pagesVariable Frequency Drives in A Power Plant: SynopsisReuben VargheseNo ratings yet
- Pulse: Modulated InvertersDocument11 pagesPulse: Modulated InvertersBrahmananda Reddy TeegalaNo ratings yet
- The Reduction of Total Harmonic Distortion For The Multilevel Converter Using Genetic Algorithms Optimization MethodDocument15 pagesThe Reduction of Total Harmonic Distortion For The Multilevel Converter Using Genetic Algorithms Optimization MethodMohammad reza eesazadehNo ratings yet
- Industrial Drives and ControlDocument10 pagesIndustrial Drives and ControlMohit SanandiyaNo ratings yet
- Control of Three-Phase Inverter For AC Motor Drive With Small DC-Link Capacitor Fed by Single-Phase AC SourceDocument8 pagesControl of Three-Phase Inverter For AC Motor Drive With Small DC-Link Capacitor Fed by Single-Phase AC SourceAnand KumarNo ratings yet
- A Review On Ripple Current Reduction Technique With Active Power FilterDocument8 pagesA Review On Ripple Current Reduction Technique With Active Power FilterAneeq AshiqNo ratings yet
- Wind Energy Interface To Grid With Load Compensation by Diode Clamped Multilevel InvertersDocument11 pagesWind Energy Interface To Grid With Load Compensation by Diode Clamped Multilevel InvertersharivarahiNo ratings yet
- (Doi 10.1109/TPEL.2014.2310731) J. Galvez M. Ordonez - Swinging Bus Operation of Inverters For Fuel Cell Applications With Small DC-Link CapacitanceDocument12 pages(Doi 10.1109/TPEL.2014.2310731) J. Galvez M. Ordonez - Swinging Bus Operation of Inverters For Fuel Cell Applications With Small DC-Link Capacitancesk.karimeeeNo ratings yet
- Optimal PDFDocument6 pagesOptimal PDFjalilemadiNo ratings yet
- DC Drives Basic Operation PrinciplesDocument3 pagesDC Drives Basic Operation Principleskadirov31No ratings yet
- ReportfinalDocument44 pagesReportfinalYuvraj GogoiNo ratings yet
- A New Topology For Unipolar Brushless DC Motor Drive With High Power FactorDocument8 pagesA New Topology For Unipolar Brushless DC Motor Drive With High Power FactorRagunathan NarayananNo ratings yet
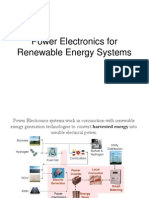
- Power Electronics For Renewable Energy SystemsDocument33 pagesPower Electronics For Renewable Energy SystemssrilakshmisiriNo ratings yet
- EE8601 UNIT 3 Closed Loop ControlDocument18 pagesEE8601 UNIT 3 Closed Loop Controlaruna4791No ratings yet
- A Two-Phase Interleaved Power Factor Correction Boost Converter With A Variation-Tolerant Phase Shifting TechniqueDocument56 pagesA Two-Phase Interleaved Power Factor Correction Boost Converter With A Variation-Tolerant Phase Shifting TechniqueVineetKumarNo ratings yet
- Chapter 1Document15 pagesChapter 1webhareggebru06No ratings yet
- Paper 15Document13 pagesPaper 15RakeshconclaveNo ratings yet
- HVDC Unit-IDocument16 pagesHVDC Unit-ISreenivas Reddy BodimallaNo ratings yet
- Researchpaper Simulation of Active Front End Converter Based VFD For Induction MotorsDocument6 pagesResearchpaper Simulation of Active Front End Converter Based VFD For Induction MotorsAnonymous zmV3UaG0TNo ratings yet
- Ijset 2014 201Document7 pagesIjset 2014 201Innovative Research PublicationsNo ratings yet
- Introduction To Electrical DrivesDocument11 pagesIntroduction To Electrical DrivesGaurav SrivastavaNo ratings yet
- Simulation and Control - FullDocument10 pagesSimulation and Control - FullTJPRC PublicationsNo ratings yet
- Variable Frequency DriveDocument4 pagesVariable Frequency Drivearavind_k104No ratings yet
- Bule Hora University Department of Ece Eceg 4222 Power Electronics & Electric DrivesDocument14 pagesBule Hora University Department of Ece Eceg 4222 Power Electronics & Electric DrivesBilisuma DamiteNo ratings yet
- Ac - Variable Frequency Drive SystemsDocument4 pagesAc - Variable Frequency Drive Systemsjyothsna123456No ratings yet
- Harmonic Mitigation in Doubly Fed Induction Generator For Wind Conversion Systems by Using Integrated Active Filter CapabilitiesDocument8 pagesHarmonic Mitigation in Doubly Fed Induction Generator For Wind Conversion Systems by Using Integrated Active Filter CapabilitiesijcctsNo ratings yet
- Department of Electrical and Computer Engineering: AdvisorDocument19 pagesDepartment of Electrical and Computer Engineering: AdvisorSabir VeNo ratings yet
- Grid-Integrated Industrial Motors-Driven Solar Water Pump With Power Flow ManagementDocument6 pagesGrid-Integrated Industrial Motors-Driven Solar Water Pump With Power Flow ManagementEditor in ChiefNo ratings yet
- Unit VDocument23 pagesUnit VDhaval PatelNo ratings yet
- Efficiency Optimization Method For Cascaded Two-Stage Boost ConverterDocument11 pagesEfficiency Optimization Method For Cascaded Two-Stage Boost ConverterragulkumarNo ratings yet
- Facts at Your Fingertips: Variable Frequency DrivesDocument1 pageFacts at Your Fingertips: Variable Frequency Drivesagrocel_bhv5591No ratings yet
- ELG4139L1PEDocument30 pagesELG4139L1PERudra MishraNo ratings yet
- Vector Controlled Induction Machines For Stand-Alone Wind Energy ApplicationsDocument8 pagesVector Controlled Induction Machines For Stand-Alone Wind Energy Applicationssatyam swarup dubeyNo ratings yet
- Investigação de Um Novo Circuito de Balanceamento de Tensão para Turbinas Eólicas Baseadas em PMSG Offshore Conectadas em ParaleloDocument7 pagesInvestigação de Um Novo Circuito de Balanceamento de Tensão para Turbinas Eólicas Baseadas em PMSG Offshore Conectadas em ParaleloDaniel reisNo ratings yet
- Matteini PHD Part1Document15 pagesMatteini PHD Part1Anonymous EnggrUsmNo ratings yet
- Doubly Fed Induction Generator Using Back To Back PWM Converters and Its Application To Variable-Speed Wind-Energy GenerationDocument11 pagesDoubly Fed Induction Generator Using Back To Back PWM Converters and Its Application To Variable-Speed Wind-Energy GenerationVally ZazaNo ratings yet
- Facts by SVC (Flexible Ac Transmission)Document4 pagesFacts by SVC (Flexible Ac Transmission)scribsunilNo ratings yet
- Calculation of Modulation Index of PWM Wave Form Feed To Inverter Feed Induction MotorDocument18 pagesCalculation of Modulation Index of PWM Wave Form Feed To Inverter Feed Induction MotorSathishkumar MalipeddiNo ratings yet
- Design and Analysis of PMSG Based Wind Power Generation: Ee Department, SRMGPC, Lucknow 1Document10 pagesDesign and Analysis of PMSG Based Wind Power Generation: Ee Department, SRMGPC, Lucknow 1AMANNo ratings yet
- TP 1800 DC-DC Converter For Hybrid Electric Vehicle and EV ArrowTimesDocument7 pagesTP 1800 DC-DC Converter For Hybrid Electric Vehicle and EV ArrowTimespapipapii100% (1)
- Sri Shakthi Institute of Engg and Technology: Two Marks Questions and AnswersDocument12 pagesSri Shakthi Institute of Engg and Technology: Two Marks Questions and AnswersdhivyadevinNo ratings yet
- Single Phase To Three Phase SystemDocument57 pagesSingle Phase To Three Phase SystemASK projectsNo ratings yet
- Analysis of Grid-Connected PV-Wind-Battery Based Multi-Input Transformer Coupled Bidirectional DC-DC ConverterDocument10 pagesAnalysis of Grid-Connected PV-Wind-Battery Based Multi-Input Transformer Coupled Bidirectional DC-DC ConverterMagpie 2023No ratings yet
- 1 PDFDocument8 pages1 PDFB.Kailash Krishna PrasadNo ratings yet
- Chopper Controlled DC DrivesDocument1 pageChopper Controlled DC Drives852963No ratings yet
- Study Analysis of Conservation of Energy With VFDDocument9 pagesStudy Analysis of Conservation of Energy With VFDHashfi HamdaniNo ratings yet
- Applications of MatixDocument2 pagesApplications of MatixSugu SukuNo ratings yet
- MV Industrial VSDDocument7 pagesMV Industrial VSDONILEDA1970No ratings yet
- Closed Loop Speed Control of 3-Phase Induction MotorDocument27 pagesClosed Loop Speed Control of 3-Phase Induction MotorRajesh kumar yadavNo ratings yet
- Avoiding Regeneration On Braking For Induction Motor With A Matrix Converter DriveDocument11 pagesAvoiding Regeneration On Braking For Induction Motor With A Matrix Converter Driveusai_ahmadNo ratings yet
- IntroductionDocument3 pagesIntroductionaziz balochNo ratings yet
- Technical Seminar On VFDDocument17 pagesTechnical Seminar On VFDRadhika Priyadarshini100% (7)
- Speed ControlDocument4 pagesSpeed ControlNguyễn LiêmNo ratings yet
- Lab2 - One-Line Diagrams: Ee461: Power Systems Colorado State UniversityDocument14 pagesLab2 - One-Line Diagrams: Ee461: Power Systems Colorado State Universitythaimt97No ratings yet
- ABSTRACT-distributed Generation, Defined As Generation Located at or Near The Load Centres, Is BeingDocument11 pagesABSTRACT-distributed Generation, Defined As Generation Located at or Near The Load Centres, Is BeingscrsanNo ratings yet
- CT NotesDocument2 pagesCT NotesAanand MehtaNo ratings yet
- D S Henderson Napier University, UK.: Variable Speed Electric Drives - Characteristics and ApplicationsDocument8 pagesD S Henderson Napier University, UK.: Variable Speed Electric Drives - Characteristics and ApplicationsscrsanNo ratings yet
- Leonardo EnergyDocument11 pagesLeonardo EnergyAllamNo ratings yet
- TransducersDocument17 pagesTransducersSoni SanjayNo ratings yet
- FDA Family of Dynamic Sealing Products: Leaders in Sealing IntegrityDocument12 pagesFDA Family of Dynamic Sealing Products: Leaders in Sealing IntegrityUday GokhaleNo ratings yet
- CD1000A - User Manual V1.0Document88 pagesCD1000A - User Manual V1.0Engr ShoaibNo ratings yet
- Is 996.2009 PDFDocument25 pagesIs 996.2009 PDFSunny ShahNo ratings yet
- MITSUBADocument2 pagesMITSUBANicole Cala Pita IINo ratings yet
- Chapter 4 - Electromagnetic Induction For SharingDocument42 pagesChapter 4 - Electromagnetic Induction For SharingTrisha Mae PerezNo ratings yet
- Commander C200 AC Drives: Enhance Throughput With Machine Safety, Communications, and Built-In PLCDocument2 pagesCommander C200 AC Drives: Enhance Throughput With Machine Safety, Communications, and Built-In PLCTraian SerbanNo ratings yet
- EPUT Assignment 1Document3 pagesEPUT Assignment 1ayan PatelNo ratings yet
- Some Practical Considerations: ME 222: Kinematics of Machines and MechanismsDocument19 pagesSome Practical Considerations: ME 222: Kinematics of Machines and MechanismsYash KalaNo ratings yet
- All About Stepper MotorsDocument21 pagesAll About Stepper MotorsdocmalamanjuNo ratings yet
- BMW EDrive 330e enDocument20 pagesBMW EDrive 330e enKok Hui DiongNo ratings yet
- Pass CDocument9 pagesPass CJoel JusayNo ratings yet
- NCERT Solutions Magnetic Effects of Current (In Text Questions) PDFDocument6 pagesNCERT Solutions Magnetic Effects of Current (In Text Questions) PDFRanjit SinghNo ratings yet
- Industrial Automation (22534) : A Laboratory Manual ForDocument56 pagesIndustrial Automation (22534) : A Laboratory Manual ForEr Amarsinh RNo ratings yet
- EEE306&EEE356Document2 pagesEEE306&EEE356Samraat SharmaNo ratings yet
- Plant Manager Manufacturing or VP Operations Manufacturing or DiDocument3 pagesPlant Manager Manufacturing or VP Operations Manufacturing or Diapi-121669822No ratings yet
- Panimalar Engineering College: Answer ALL Questions, Choose The Best Answer Part - A (30 X 1 30)Document6 pagesPanimalar Engineering College: Answer ALL Questions, Choose The Best Answer Part - A (30 X 1 30)sivaNo ratings yet
- Unico Non PVFDocument30 pagesUnico Non PVFReynold SuarezNo ratings yet
- Motors and GeneratorsDocument14 pagesMotors and Generatorshongkongkon100% (1)
- Chigo: Service MannalDocument104 pagesChigo: Service MannalBianca GligorNo ratings yet
- Siep C720829 21a 2 1 PDFDocument160 pagesSiep C720829 21a 2 1 PDFHelmmutt RZNo ratings yet
- Precise2023 en Final WEBDocument32 pagesPrecise2023 en Final WEBvivekNo ratings yet
- ACS580 Compared To ACS550 RevBDocument24 pagesACS580 Compared To ACS550 RevBBharanee100% (1)
- FR-E800 Instruction Manual - Function Ib0600868engeDocument534 pagesFR-E800 Instruction Manual - Function Ib0600868engeNguyễn Quang HảoNo ratings yet
- Zoe Coffee Machine ManualDocument26 pagesZoe Coffee Machine ManualNicolas MoryNo ratings yet
- Pertemuan12 ESP 04042016 13042016Document192 pagesPertemuan12 ESP 04042016 13042016Priozky Pratama Purba100% (1)
- 1209B-1221B RevDDocument2 pages1209B-1221B RevDSergio RecabarrenNo ratings yet
- KBMM SMT Manual PDFDocument32 pagesKBMM SMT Manual PDFRicardo Garcia FuentesNo ratings yet
- Autonomous Seed Sowing and Watering AgribotDocument3 pagesAutonomous Seed Sowing and Watering AgribotInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- MotorsDocument6 pagesMotorsLeshanNo ratings yet
- Conquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeFrom EverandConquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeRating: 4.5 out of 5 stars4.5/5 (10)
- INCOSE Systems Engineering Handbook: A Guide for System Life Cycle Processes and ActivitiesFrom EverandINCOSE Systems Engineering Handbook: A Guide for System Life Cycle Processes and ActivitiesRating: 5 out of 5 stars5/5 (1)
- Electrical Engineering 101: Everything You Should Have Learned in School...but Probably Didn'tFrom EverandElectrical Engineering 101: Everything You Should Have Learned in School...but Probably Didn'tRating: 4.5 out of 5 stars4.5/5 (27)
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionFrom EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionRating: 4.5 out of 5 stars4.5/5 (543)
- Digital Filmmaking: The Ultimate Guide to Web Video Production for Beginners and Non-Professionals, Learn Useful Tips and Advice on How You Can Create, Film and Edit Your VideosFrom EverandDigital Filmmaking: The Ultimate Guide to Web Video Production for Beginners and Non-Professionals, Learn Useful Tips and Advice on How You Can Create, Film and Edit Your VideosRating: 5 out of 5 stars5/5 (1)
- Hacking Electronics: An Illustrated DIY Guide for Makers and HobbyistsFrom EverandHacking Electronics: An Illustrated DIY Guide for Makers and HobbyistsRating: 3.5 out of 5 stars3.5/5 (2)
- Practical Electrical Wiring: Residential, Farm, Commercial, and IndustrialFrom EverandPractical Electrical Wiring: Residential, Farm, Commercial, and IndustrialRating: 3.5 out of 5 stars3.5/5 (3)
- Retro Gaming with Raspberry Pi: Nearly 200 Pages of Video Game ProjectsFrom EverandRetro Gaming with Raspberry Pi: Nearly 200 Pages of Video Game ProjectsNo ratings yet
- Programming the Raspberry Pi, Third Edition: Getting Started with PythonFrom EverandProgramming the Raspberry Pi, Third Edition: Getting Started with PythonRating: 5 out of 5 stars5/5 (2)
- 2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersFrom Everand2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersRating: 5 out of 5 stars5/5 (1)
- Analog Design and Simulation Using OrCAD Capture and PSpiceFrom EverandAnalog Design and Simulation Using OrCAD Capture and PSpiceNo ratings yet
- Current Interruption Transients CalculationFrom EverandCurrent Interruption Transients CalculationRating: 4 out of 5 stars4/5 (1)
- Build Your Own Electronics WorkshopFrom EverandBuild Your Own Electronics WorkshopRating: 3.5 out of 5 stars3.5/5 (3)
- A Mind at Play: How Claude Shannon Invented the Information AgeFrom EverandA Mind at Play: How Claude Shannon Invented the Information AgeRating: 4 out of 5 stars4/5 (53)
- Heat Transfer Engineering: Fundamentals and TechniquesFrom EverandHeat Transfer Engineering: Fundamentals and TechniquesRating: 4 out of 5 stars4/5 (1)
- Teach Yourself Electricity and Electronics, 6th EditionFrom EverandTeach Yourself Electricity and Electronics, 6th EditionRating: 3.5 out of 5 stars3.5/5 (15)