You might also like
- Complete Quantitative Aptitude Questions Complete Quantitative Aptitude Questions For SBI, IBPS ... PDFDocument460 pagesComplete Quantitative Aptitude Questions Complete Quantitative Aptitude Questions For SBI, IBPS ... PDFKhizer Khan100% (4)
- Basic Mathematical EconomicsDocument41 pagesBasic Mathematical EconomicsBenjamin Franklin0% (1)
- CMS6 Ext2 Y12 Book PDFDocument313 pagesCMS6 Ext2 Y12 Book PDFAreez Raza100% (5)
- Abstract 1 Group Theory 250pages79Document15 pagesAbstract 1 Group Theory 250pages79julietNo ratings yet
- Calculus of VariationsDocument15 pagesCalculus of VariationsArun Prabhath100% (4)
- Functional Operators (AM-22), Volume 2: The Geometry of Orthogonal Spaces. (AM-22)From EverandFunctional Operators (AM-22), Volume 2: The Geometry of Orthogonal Spaces. (AM-22)No ratings yet
- Lecture Notes On Multivariable CalculusDocument36 pagesLecture Notes On Multivariable CalculusAnwar ShahNo ratings yet
- Mechanics Lagrangian and HamilitonianDocument56 pagesMechanics Lagrangian and HamilitonianTrevor Scheopner100% (1)
- Learning Activity Sheets in Science7 - No. 1Document6 pagesLearning Activity Sheets in Science7 - No. 1Cherry Mae MamarilNo ratings yet
- Surveying&TransportationEngineeringFALCON2 PDFDocument27 pagesSurveying&TransportationEngineeringFALCON2 PDFChavin StormNo ratings yet
- Winitzki - Heidelberg Lectures On Advanced General Relativity 2007Document156 pagesWinitzki - Heidelberg Lectures On Advanced General Relativity 2007winitzkiNo ratings yet
- Summary Notes On Maximization: KC BorderDocument20 pagesSummary Notes On Maximization: KC BorderMiloje ĐukanovićNo ratings yet
- Van de Walle Black Line MastersDocument78 pagesVan de Walle Black Line Mastersapi-28127245350% (2)
- Variational Principles and The Rayleigh-Ritz MethodDocument18 pagesVariational Principles and The Rayleigh-Ritz MethodsonofalexanderNo ratings yet
- Arsdigita University Month 0: Mathematics For Computer ScienceDocument24 pagesArsdigita University Month 0: Mathematics For Computer ScienceDhinakar ReddyNo ratings yet
- Equations of Electromagnetism in Some Special Anisotropic SpacesDocument15 pagesEquations of Electromagnetism in Some Special Anisotropic SpacesevilmonsterbeastNo ratings yet
- Mark Rusi BolDocument55 pagesMark Rusi BolPat BustillosNo ratings yet
- Adapting To Unknown Smoothness: R. M. Castro May 20, 2011Document9 pagesAdapting To Unknown Smoothness: R. M. Castro May 20, 2011Raunak JainNo ratings yet
- Maharani 2019Document6 pagesMaharani 2019angelNo ratings yet
- A Nystrom Method For A Class of FredholmDocument20 pagesA Nystrom Method For A Class of FredholmAydinel HakanNo ratings yet
- Convexity and Differentiable Functions: R R R R R R R R R R R R R R R RDocument5 pagesConvexity and Differentiable Functions: R R R R R R R R R R R R R R R RhoalongkiemNo ratings yet
- Green's Functions: Lu (X) F (X), D DX P (X) D DX Q (X)Document11 pagesGreen's Functions: Lu (X) F (X), D DX P (X) D DX Q (X)Hind Abu GhazlehNo ratings yet
- Applied Mathematics Letters: M. Soleimani-DamanehDocument4 pagesApplied Mathematics Letters: M. Soleimani-DamanehhungkgNo ratings yet
- From Fourier Series To Fourier Integral: e X E, e eDocument10 pagesFrom Fourier Series To Fourier Integral: e X E, e evarun186No ratings yet
- Higher Order Derivatives of The Inverse Function - Version 2Document6 pagesHigher Order Derivatives of The Inverse Function - Version 2andrej_liptajNo ratings yet
- Theorist's Toolkit Lecture 10: Discrete Fourier Transform and Its UsesDocument9 pagesTheorist's Toolkit Lecture 10: Discrete Fourier Transform and Its UsesJeremyKunNo ratings yet
- Diapositivas Larco AguirreDocument18 pagesDiapositivas Larco AguirreWilson LawrenteNo ratings yet
- Calculus of Variations: X X X X 0Document7 pagesCalculus of Variations: X X X X 0hammoudeh13No ratings yet
- 1 Continuous Functions On Compact Sets and Rela-Ted Extremum ProblemsDocument10 pages1 Continuous Functions On Compact Sets and Rela-Ted Extremum ProblemscatalinNo ratings yet
- Chapter 4. Extrema and Double Integrals: Section 4.1: Extrema, Second Derivative TestDocument6 pagesChapter 4. Extrema and Double Integrals: Section 4.1: Extrema, Second Derivative TestStelios KondosNo ratings yet
- Sol 5Document4 pagesSol 5InstantRamenNo ratings yet
- ExtVal Slides 2011 2011Document28 pagesExtVal Slides 2011 2011Alzeno DoeNo ratings yet
- ECN 2115 Lecture 1 - 2Document6 pagesECN 2115 Lecture 1 - 2GABRIEL CHIKUSELANo ratings yet
- AcamDocument32 pagesAcamAlin FodorNo ratings yet
- G(S) L (F (X) ) F (X) e DX: I. Laplace TransformDocument7 pagesG(S) L (F (X) ) F (X) e DX: I. Laplace TransformSnirPianoNo ratings yet
- 03a PDFDocument7 pages03a PDFAwais YousafNo ratings yet
- Lecture 31: Lagrange Multiplier Method: P DF DT T DR DT P P P PDocument2 pagesLecture 31: Lagrange Multiplier Method: P DF DT T DR DT P P P PSaurabh TomarNo ratings yet
- Lecture 8: Strong Duality: 8.1.1 Primal and Dual ProblemsDocument9 pagesLecture 8: Strong Duality: 8.1.1 Primal and Dual ProblemsCristian Núñez ClausenNo ratings yet
- An Introduction To Lagrangian and Hamiltonian Mechanics: Lecture NotesDocument59 pagesAn Introduction To Lagrangian and Hamiltonian Mechanics: Lecture Notesadam_87jktNo ratings yet
- Vito CruzDocument10 pagesVito CruzWalter Andrés Páez GaviriaNo ratings yet
- An Application of The Calculus of Variations To Sturm Liouville TheoryDocument13 pagesAn Application of The Calculus of Variations To Sturm Liouville TheorybobmezzNo ratings yet
- Octav Dragoi - Lagrange MultipliersDocument5 pagesOctav Dragoi - Lagrange MultipliersOctav DragoiNo ratings yet
- Lagrange Multipliers Can Fail To Determine Extrema: AcknowledgmentDocument3 pagesLagrange Multipliers Can Fail To Determine Extrema: Acknowledgmentarvind lakshmi ranjan100% (2)
- 1 Inverse and Implicit Mapping Theorems: Mo-Tivation and HeuristicsDocument7 pages1 Inverse and Implicit Mapping Theorems: Mo-Tivation and HeuristicsAurelio ReyesNo ratings yet
- MODULE 1 CE Math107EDocument12 pagesMODULE 1 CE Math107EAxl TorrilloNo ratings yet
- Change of Variable Formula For Multiple IntegralsDocument6 pagesChange of Variable Formula For Multiple IntegralsAbhishek SenapatiNo ratings yet
- Extending The Applicability of The SuperHalleyLike Method Using Continuous Derivatives and Restricted Convergence DomainsDocument20 pagesExtending The Applicability of The SuperHalleyLike Method Using Continuous Derivatives and Restricted Convergence Domainstalvane.santos069No ratings yet
- Approximation of Multivariate FunctionsDocument10 pagesApproximation of Multivariate FunctionssiddbnNo ratings yet
- Lagrange Multipliers As Quantitative Indicators in EconomicsDocument5 pagesLagrange Multipliers As Quantitative Indicators in Economicsdaniela.romerofrNo ratings yet
- Finite Element Methods Applied To Solve PDE: Lecture NotesDocument19 pagesFinite Element Methods Applied To Solve PDE: Lecture NotesMohammad Rizwan MalikNo ratings yet
- The Methods of Solution For Constrained Nonlinear ProgrammingDocument6 pagesThe Methods of Solution For Constrained Nonlinear ProgramminginventyNo ratings yet
- Lagrange MultiplierDocument1 pageLagrange Multipliertrilochan8No ratings yet
- Elementary FunctionsDocument6 pagesElementary FunctionsHoàng Thành NguyễnNo ratings yet
- Limiting Behavior of Solutions of Subelliptic Heat Equations - Federica DRAGONIDocument13 pagesLimiting Behavior of Solutions of Subelliptic Heat Equations - Federica DRAGONIJefferson Johannes Roth FilhoNo ratings yet
- Are Loss Functions All The Same?: L. Rosasco E. de Vito A. Caponnetto M. Piana A. Verri September 30, 2003Document16 pagesAre Loss Functions All The Same?: L. Rosasco E. de Vito A. Caponnetto M. Piana A. Verri September 30, 2003aakarshNo ratings yet
- NumericalMethods UofVDocument182 pagesNumericalMethods UofVsaladsamurai100% (1)
- Review of School Math Content Limits and IntegralDocument13 pagesReview of School Math Content Limits and IntegralwidhissNo ratings yet
- Results On A Conjecture of Chen and Yi: Xiao-Min Li Yan Liu Hong-Xun YiDocument25 pagesResults On A Conjecture of Chen and Yi: Xiao-Min Li Yan Liu Hong-Xun YiBasir AhamedNo ratings yet
- Difference Equations in Normed Spaces: Stability and OscillationsFrom EverandDifference Equations in Normed Spaces: Stability and OscillationsNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Beta Anomaly An Ex-Ante Tail RiskDocument104 pagesBeta Anomaly An Ex-Ante Tail RiskDaniel Lee Eisenberg JacobsNo ratings yet
- Claudia Jones Nuclear TestingDocument25 pagesClaudia Jones Nuclear TestingDaniel Lee Eisenberg JacobsNo ratings yet
- Continuity Change State of Process of Task ofDocument1 pageContinuity Change State of Process of Task ofDaniel Lee Eisenberg JacobsNo ratings yet
- Why The Euro Will Rival The Dollar PDFDocument25 pagesWhy The Euro Will Rival The Dollar PDFDaniel Lee Eisenberg JacobsNo ratings yet
- Conference Group For Central European History of The American Historical AssociationDocument9 pagesConference Group For Central European History of The American Historical AssociationDaniel Lee Eisenberg JacobsNo ratings yet
- Theophilus Capital Against: Fisk Labor1Document9 pagesTheophilus Capital Against: Fisk Labor1Daniel Lee Eisenberg Jacobs100% (1)
- Karl Kautsky Republic and Social Democra PDFDocument4 pagesKarl Kautsky Republic and Social Democra PDFDaniel Lee Eisenberg JacobsNo ratings yet
- Borel Sets PDFDocument181 pagesBorel Sets PDFDaniel Lee Eisenberg Jacobs100% (1)
- 1st International: Djacobs November 2020Document5 pages1st International: Djacobs November 2020Daniel Lee Eisenberg JacobsNo ratings yet
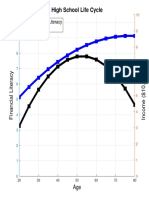
- High School Life Cycle: Financial Literacy IncomeDocument1 pageHigh School Life Cycle: Financial Literacy IncomeDaniel Lee Eisenberg JacobsNo ratings yet
- Cover FERCDocument1 pageCover FERCDaniel Lee Eisenberg JacobsNo ratings yet
- Teach-In: Government of The People, by The People, For The PeopleDocument24 pagesTeach-In: Government of The People, by The People, For The PeopleDaniel Lee Eisenberg JacobsNo ratings yet
- The Saving Behavior of Public Vocational High School Students of Business and Management Program in Semarang SitiDocument8 pagesThe Saving Behavior of Public Vocational High School Students of Business and Management Program in Semarang SitiDaniel Lee Eisenberg JacobsNo ratings yet
- Gpebook PDFDocument332 pagesGpebook PDFDaniel Lee Eisenberg JacobsNo ratings yet
- Individualization of Robo-AdviceDocument8 pagesIndividualization of Robo-AdviceDaniel Lee Eisenberg JacobsNo ratings yet
- Necessary and Sufficient Conditions For Dynamic OptimizationDocument18 pagesNecessary and Sufficient Conditions For Dynamic OptimizationDaniel Lee Eisenberg JacobsNo ratings yet
- Bank Loan Loss ProvisioningDocument17 pagesBank Loan Loss ProvisioningDaniel Lee Eisenberg JacobsNo ratings yet
- Simple BeamerDocument25 pagesSimple BeamerDaniel Lee Eisenberg JacobsNo ratings yet
- Lagrange Housner HudsonDocument60 pagesLagrange Housner HudsonDanielMontesdeocaNo ratings yet
- Odisha Board Class 12 Maths Sample PapersDocument36 pagesOdisha Board Class 12 Maths Sample PapersManoj GuruNo ratings yet
- 2020-Physical-Sciences-Grade-11-Vectors, MotionDocument68 pages2020-Physical-Sciences-Grade-11-Vectors, MotionJoyce ChikwaNo ratings yet
- Namma Kalvi 10th Maths PTA Question Papers WTS 221541Document24 pagesNamma Kalvi 10th Maths PTA Question Papers WTS 221541AnandhNo ratings yet
- CAD Unit - 4Document54 pagesCAD Unit - 4Ra BalamuruganNo ratings yet
- Phys Sol U01 ReviewDocument29 pagesPhys Sol U01 Reviewresinid530No ratings yet
- EEE - 23 HW 1Document4 pagesEEE - 23 HW 1Carlo JimenezNo ratings yet
- Metric Spaces, Generalized Logic, and Closed CategoriesDocument37 pagesMetric Spaces, Generalized Logic, and Closed CategoriesPaulina RadeckaNo ratings yet
- Phys 3106Document8 pagesPhys 3106myo htetNo ratings yet
- NC DSTV InterfaceDocument23 pagesNC DSTV Interfaceml12783919No ratings yet
- Mat001-18 First LectureDocument13 pagesMat001-18 First LectureMaui FloresNo ratings yet
- POTWA 19 Combined3 4Document170 pagesPOTWA 19 Combined3 4Nguyen MinhThanhNo ratings yet
- 2022 Fall KMG7 L06 ExerciseDocument9 pages2022 Fall KMG7 L06 Exerciseemilys2029No ratings yet
- Cambridge O Level: Mathematics (Syllabus D) 4024/11Document20 pagesCambridge O Level: Mathematics (Syllabus D) 4024/11Kiouki 4No ratings yet
- 9maths 6 Lines and AnglesDocument19 pages9maths 6 Lines and Anglesamir shaharanNo ratings yet
- Math ProjectDocument39 pagesMath Projectidod2307No ratings yet
- ComplexDocument2 pagesComplexsantosh tripathyNo ratings yet
- Angular Motion NotesDocument48 pagesAngular Motion NotesAna Hidayah Syuhada100% (1)
- Introduction To Euclid's Geometry: ProjectDocument6 pagesIntroduction To Euclid's Geometry: ProjectBOSSXNo ratings yet
- CubesDocument11 pagesCubesPawan Singh JadounNo ratings yet
- Introduction To Poles and ZerosDocument5 pagesIntroduction To Poles and Zerosneelopal_urpNo ratings yet
- Rotational and Translational MotionDocument37 pagesRotational and Translational MotionYu ErinNo ratings yet
- Vector LessonsDocument36 pagesVector LessonsMarc RiveraNo ratings yet
- C3 Trigonometry E - QuestionsDocument1 pageC3 Trigonometry E - QuestionsBenny NguyenNo ratings yet