You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5810)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (844)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Sniffing SpoofingDocument6 pagesSniffing SpoofingDeTRoyDNo ratings yet
- PCI Express M.2 Specification. Rev 0.7Document180 pagesPCI Express M.2 Specification. Rev 0.7iscrbdi100% (2)
- EVB-I94124ADI User ManualDocument19 pagesEVB-I94124ADI User ManualÖzcan BıyıkNo ratings yet
- List of Router Configuration Commands: Router (User Exec Mode) ToDocument6 pagesList of Router Configuration Commands: Router (User Exec Mode) ToboomatiNo ratings yet
- 1990 Benchmarq Data BookDocument306 pages1990 Benchmarq Data BookJonasFilbertNo ratings yet
- Emu LogDocument4 pagesEmu LogDamas Eka KusumaNo ratings yet
- Electrical EngineeringDocument4 pagesElectrical EngineeringsthoutirNo ratings yet
- UAT FormDocument75 pagesUAT FormPriyanshu KumarNo ratings yet
- SMP Gateway Automation FunctionsDocument61 pagesSMP Gateway Automation FunctionsJose Blanco Rojas100% (1)
- Ex #5 (FET)Document5 pagesEx #5 (FET)manishNo ratings yet
- Microsemi ZL38063 ProductBrief v2Document2 pagesMicrosemi ZL38063 ProductBrief v2ajaipauloseNo ratings yet
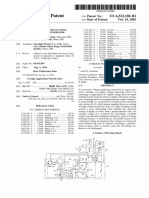
- US6522106 AVR Generator Patent HondaDocument8 pagesUS6522106 AVR Generator Patent HondaBruno LambertNo ratings yet
- IEEE 81 - Guide For Measuring Earth Resistivity, Ground Impedance and Earth Surface Potentials of A Ground System - 1983 PDFDocument44 pagesIEEE 81 - Guide For Measuring Earth Resistivity, Ground Impedance and Earth Surface Potentials of A Ground System - 1983 PDFmohammadkassarNo ratings yet
- Basic Computer Organisation and DesignDocument5 pagesBasic Computer Organisation and DesignAadhya JyothiradityaaNo ratings yet
- Teradata Data Mover Installation, Configuration, and Upgrade Guide For CustomersDocument62 pagesTeradata Data Mover Installation, Configuration, and Upgrade Guide For CustomerspintadusNo ratings yet
- Multiple Access protocol-ALOHA, CSMA, CSMA/CA and Csma/CdDocument11 pagesMultiple Access protocol-ALOHA, CSMA, CSMA/CA and Csma/CdDr. Km. Sucheta Singh (SET Assistant Professor)No ratings yet
- Bda LabDocument37 pagesBda LabDhanush KumarNo ratings yet
- UG0586 User Guide RTG4 FPGA Clocking ResourcesDocument82 pagesUG0586 User Guide RTG4 FPGA Clocking ResourcesNguyen Van ToanNo ratings yet
- Downloaded From Manuals Search EngineDocument9 pagesDownloaded From Manuals Search EngineRODRIGO MELENDEZ TRUJILLONo ratings yet
- DFPlayer Mini SKU - DFR0299 - DFRobot Electronic Product Wiki and Tutorial - Arduino and RobotDocument14 pagesDFPlayer Mini SKU - DFR0299 - DFRobot Electronic Product Wiki and Tutorial - Arduino and RobotAntonio ToledoNo ratings yet
- GTK Development Using Glade 3Document39 pagesGTK Development Using Glade 3Carlos Alberto Ríos Stange100% (2)
- Variable Frequency Constant Voltage Voltage/Frequency Control (V/F)Document6 pagesVariable Frequency Constant Voltage Voltage/Frequency Control (V/F)LalitNo ratings yet
- 3.PDTacll 4208 Iris Qualitrol Brochure V2 11 20Document4 pages3.PDTacll 4208 Iris Qualitrol Brochure V2 11 20le hoai NamNo ratings yet
- Stok Laptop 1okt2020Document6 pagesStok Laptop 1okt2020Kodok BersinarNo ratings yet
- 2 EE Objective Paper II 2011Document18 pages2 EE Objective Paper II 2011LavNo ratings yet
- XT2095-X (Malta 20) Moto E7 LCM Spec 1.0Document48 pagesXT2095-X (Malta 20) Moto E7 LCM Spec 1.0jdfontalvo080No ratings yet
- ATM Security With EEPROM and One Time Password With GSMDocument4 pagesATM Security With EEPROM and One Time Password With GSMChandrahasJoshiNo ratings yet
- Elipse IEC 61850 Client Driver TICS Ed2 PDFDocument10 pagesElipse IEC 61850 Client Driver TICS Ed2 PDFFernando CamposNo ratings yet
- Sapnote 997510 J2EE Engine Doesn't Start-Bootstrap IssuesDocument3 pagesSapnote 997510 J2EE Engine Doesn't Start-Bootstrap Issuesraghav108No ratings yet
- DKDDPB910A202 VACON Compact Ac Drive LRDocument8 pagesDKDDPB910A202 VACON Compact Ac Drive LRSangu GopaNo ratings yet