You might also like
- ZX200 5G Operational Principle TODCD en 01Document346 pagesZX200 5G Operational Principle TODCD en 01ibnu malkan100% (7)
- Folded PlatesDocument12 pagesFolded PlatesMohd Salahuddin100% (1)
- DESIGN SPECIFICATIONS FOR HIGHWAY BRIDGES-2 2002 (Japan)Document10 pagesDESIGN SPECIFICATIONS FOR HIGHWAY BRIDGES-2 2002 (Japan)이동욱No ratings yet
- Nokia - LTE Handover FeatureDocument34 pagesNokia - LTE Handover FeatureOur World100% (1)
- 2285BDocument370 pages2285BPuro RockNo ratings yet
- CAD Notes Unit II Part 2Document11 pagesCAD Notes Unit II Part 2Mohd InayathNo ratings yet
- Solid ModelingDocument7 pagesSolid ModelingVijay Singh100% (1)
- Modeling 526Document11 pagesModeling 526SasiKumar PetchiappanNo ratings yet
- Presentation On Solid ModellingDocument31 pagesPresentation On Solid ModellingdivyanshuNo ratings yet
- Chapter 12 Solid Modeling Wireframe, Surface, Solid ModelingDocument11 pagesChapter 12 Solid Modeling Wireframe, Surface, Solid ModelingSasiKumar PetchiappanNo ratings yet
- Chap - 678 Modeling 137Document11 pagesChap - 678 Modeling 137SasiKumar PetchiappanNo ratings yet
- Unit - 4Document52 pagesUnit - 4qwdfghNo ratings yet
- Unit III Solid ModellingDocument63 pagesUnit III Solid ModellingSuhasNo ratings yet
- Unit 3 Solid ModelingDocument106 pagesUnit 3 Solid Modelingbhushan2957No ratings yet
- Concepts of Solid ModelingDocument29 pagesConcepts of Solid ModelingGani ManiKantaNo ratings yet
- 02 Solid ModelingDocument21 pages02 Solid ModelingRonak PatelNo ratings yet
- Manifold (Good)Document51 pagesManifold (Good)Rajesh KaluriNo ratings yet
- Unit 2 Solid ModelingDocument26 pagesUnit 2 Solid ModelingMohammed Fakhruddin Hasan NizamiNo ratings yet
- Solid Modeling 12Document33 pagesSolid Modeling 12SasiKumar PetchiappanNo ratings yet
- Chapter-962 Modeling Basics: 5/2/2013 I/C: Regalla Srinivasa Prakash 1Document33 pagesChapter-962 Modeling Basics: 5/2/2013 I/C: Regalla Srinivasa Prakash 1SasiKumar PetchiappanNo ratings yet
- Computer Aided Design (Cad) : Unit - Ii Geometric ModelingDocument34 pagesComputer Aided Design (Cad) : Unit - Ii Geometric ModelingvemonNo ratings yet
- Solid Modeling 123Document33 pagesSolid Modeling 123SasiKumar PetchiappanNo ratings yet
- Technical Talk On CAD: Kurian Antony M.E Cad/CamDocument28 pagesTechnical Talk On CAD: Kurian Antony M.E Cad/Camjust4kurianNo ratings yet
- Geometric Modeling: Geometrical Entities E.G. Circular, Rectangular, Straight. Elliptical Etc. Refers To GeometricalDocument9 pagesGeometric Modeling: Geometrical Entities E.G. Circular, Rectangular, Straight. Elliptical Etc. Refers To Geometricalstephen mwendwaNo ratings yet
- CADM (Solids)Document4 pagesCADM (Solids)Kajal 64M.E.No ratings yet
- GMDocument41 pagesGMyish ChaudhariNo ratings yet
- Geometric Modeling-Chapter 4Document46 pagesGeometric Modeling-Chapter 4Suraj RaviNo ratings yet
- Assignment 2 CadmDocument15 pagesAssignment 2 CadmLowEnd GamerNo ratings yet
- Geometric Modeling TechniqueDocument59 pagesGeometric Modeling TechniqueSrinivasan V PNo ratings yet
- Unit 4 CADDocument45 pagesUnit 4 CADiampiyushsahuNo ratings yet
- Solid Modeling B Rep FinalDocument68 pagesSolid Modeling B Rep Finaltimepass9580No ratings yet
- Cos340june11 Paper MemoDocument12 pagesCos340june11 Paper MemoNeli MkhatshwaNo ratings yet
- Cad 19Document44 pagesCad 19Priyakrishnan SenthilNo ratings yet
- CADM Unit Geometric Modeling - SurfacesDocument31 pagesCADM Unit Geometric Modeling - SurfacesWilsonNo ratings yet
- Module 1Document45 pagesModule 1SohanNo ratings yet
- Half-Space (Geometry) : Boundary RepresentationDocument5 pagesHalf-Space (Geometry) : Boundary RepresentationSudeep Kumar SinghNo ratings yet
- CAD CAM Viva QuestionsDocument3 pagesCAD CAM Viva QuestionsTheja Sree100% (3)
- Bresenham's Algorithm Enables The Selection of Optimum Raster Locations To Represent A Straight LineDocument24 pagesBresenham's Algorithm Enables The Selection of Optimum Raster Locations To Represent A Straight LineM.ThirunavukkarasuNo ratings yet
- CC 3Document11 pagesCC 3sumitNo ratings yet
- CG Lesson09 (En)Document37 pagesCG Lesson09 (En)Hoàng MinhNo ratings yet
- 3D Modelling: DR Rajesh Panda Sto - Cad/Cam - CipetDocument52 pages3D Modelling: DR Rajesh Panda Sto - Cad/Cam - CipetRajesh PandaNo ratings yet
- CAD CAM Viva QuestionsDocument3 pagesCAD CAM Viva QuestionsAshok BhatiaNo ratings yet
- VR Unit 2& 3Document18 pagesVR Unit 2& 3WWE OFFICAL MATCH CARDS.No ratings yet
- Unit 2 (Detail)Document123 pagesUnit 2 (Detail)vishwajeet patilNo ratings yet
- CAD CAM - PresentationDocument25 pagesCAD CAM - PresentationrohanNo ratings yet
- Unit Ii Me16501 PDFDocument192 pagesUnit Ii Me16501 PDFSelva BabuNo ratings yet
- Solid Modeling Techniques-Unit4Document348 pagesSolid Modeling Techniques-Unit4Dr.P.Ravinder Reddy ProfessorNo ratings yet
- Chapter 4 CurvesDocument21 pagesChapter 4 CurvesN Dhanunjaya Rao BorraNo ratings yet
- CH Lecture 6Document55 pagesCH Lecture 6Sohail SakhaniNo ratings yet
- 15-1-Parametric Solid Modeling - FundamentalsDocument51 pages15-1-Parametric Solid Modeling - FundamentalsNANDULA GOUTHAM SAINo ratings yet
- Geometric ModelingDocument39 pagesGeometric ModelingPadmavathi Putra Lokesh100% (2)
- Image Segmentation, Representation & DescriptionDocument37 pagesImage Segmentation, Representation & DescriptionEshan JainNo ratings yet
- Solid Modeling AssignmentDocument18 pagesSolid Modeling AssignmentKarthick SanNo ratings yet
- Curve, Surface and SolidDocument62 pagesCurve, Surface and SolidwadlanNo ratings yet
- Shape Features: Jamil AhmadDocument28 pagesShape Features: Jamil AhmadhandojoeNo ratings yet
- Solid Modeling PresentationDocument27 pagesSolid Modeling PresentationNilesh RanaNo ratings yet
- Cs6504 - Computer Graphics Two Marks Question With Answers Unit-I IntroductionDocument8 pagesCs6504 - Computer Graphics Two Marks Question With Answers Unit-I IntroductionAnonymous TvppppNo ratings yet
- 8 Solid and Assembly ModelingDocument127 pages8 Solid and Assembly ModelingNaveen YadavNo ratings yet
- Cad Exp 3Document5 pagesCad Exp 3VedprakashNo ratings yet
- Unit - 3 (Old) Geometric Modeling TechniquesDocument48 pagesUnit - 3 (Old) Geometric Modeling TechniquesNithin GowdaNo ratings yet
- Modelling Techniques in CADDocument33 pagesModelling Techniques in CAD9826100% (2)
- IPE-409 CADCAM Geometric Modelling May 2018Document33 pagesIPE-409 CADCAM Geometric Modelling May 2018ishmamNo ratings yet
- Bounding Volume: Exploring Spatial Representation in Computer VisionFrom EverandBounding Volume: Exploring Spatial Representation in Computer VisionNo ratings yet
- Standard-Slope Integration: A New Approach to Numerical IntegrationFrom EverandStandard-Slope Integration: A New Approach to Numerical IntegrationNo ratings yet
- Pyramid Algorithms: A Dynamic Programming Approach to Curves and Surfaces for Geometric ModelingFrom EverandPyramid Algorithms: A Dynamic Programming Approach to Curves and Surfaces for Geometric ModelingNo ratings yet
- Dfccil BasicsDocument62 pagesDfccil BasicsDHARMENDRANo ratings yet
- Pso HygrolDocument1 pagePso HygrolMuhammad EhsanNo ratings yet
- Bose 802 III Service Manual 3Document8 pagesBose 802 III Service Manual 3justinnandor100% (1)
- Hce - hx210hd & Hx220hdDocument11 pagesHce - hx210hd & Hx220hdRivandho AnangNo ratings yet
- Presented By:-: Group 5 Section ADocument25 pagesPresented By:-: Group 5 Section ASuraj KumarNo ratings yet
- PLCYC1Document4 pagesPLCYC1skitz104No ratings yet
- EIM 9 - Q3 - Mod4 - USLeM RTPDocument8 pagesEIM 9 - Q3 - Mod4 - USLeM RTPEduard SantosNo ratings yet
- Construction of Sewerage System and WWTP in Velipoja Area - Phase 3Document1 pageConstruction of Sewerage System and WWTP in Velipoja Area - Phase 3IlirMemaNo ratings yet
- Satellite Communications Theory - Book 2Document36 pagesSatellite Communications Theory - Book 2namakoolasolomonNo ratings yet
- Roughness Conversion Chart RampinelliDocument1 pageRoughness Conversion Chart RampinelliServesh KumarNo ratings yet
- Chapter 9Document52 pagesChapter 9Navian NadeemNo ratings yet
- Process Specification: Docmaster: Uncontrolled Copy When PrintedDocument30 pagesProcess Specification: Docmaster: Uncontrolled Copy When PrintedCemre BağbozanNo ratings yet
- Snorkel TB126J PDFDocument234 pagesSnorkel TB126J PDFAnar QasimovNo ratings yet
- Module 5-MechanicsDocument33 pagesModule 5-MechanicsAsha AsokNo ratings yet
- OP Blender All EN REV06 A5Document20 pagesOP Blender All EN REV06 A5ulvi ganjaliNo ratings yet
- ALLIGATOR - TECHNICAL CATALOGUE - Vol.21011 - 50SI-R4Document18 pagesALLIGATOR - TECHNICAL CATALOGUE - Vol.21011 - 50SI-R4Linda MadlalaNo ratings yet
- Problem Solutions For Chapter 12Document10 pagesProblem Solutions For Chapter 12api-19870706No ratings yet
- Crompton GreavesDocument26 pagesCrompton GreavesAnonymous DJybroNXNo ratings yet
- AC Impedance Analysis of Ionic and Electronic Conductivities inDocument9 pagesAC Impedance Analysis of Ionic and Electronic Conductivities inParul Kumar SharmaNo ratings yet
- Calculating The Load of Basket Hitches and BridlesDocument2 pagesCalculating The Load of Basket Hitches and Bridlesbilo1984No ratings yet
- Cordex - HP 1.2kW - Rev DDocument2 pagesCordex - HP 1.2kW - Rev DCésar Fidel CruzNo ratings yet
- B Ws 70Document4 pagesB Ws 70Soumya Ranjan NayakNo ratings yet
- AT6302 - Mechanics of Machines - Part ADocument13 pagesAT6302 - Mechanics of Machines - Part ApavanraneNo ratings yet
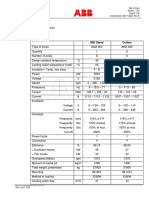
- ABB Main Motors AndritzDocument1 pageABB Main Motors AndritzAKIRA KUNo ratings yet
- SHPX4-11W Product SpecificationDocument6 pagesSHPX4-11W Product SpecificationAmit GorkhaliNo ratings yet