You might also like
- Diagrama hk.t.rt2842p639Document40 pagesDiagrama hk.t.rt2842p639Miguel Esteban0% (1)
- Experiment in Digital Fundamentals PDFDocument2 pagesExperiment in Digital Fundamentals PDFMatt0% (2)
- Ssm2120 2 ExpanderDocument12 pagesSsm2120 2 ExpandershirtquittersNo ratings yet
- SG 3524Document10 pagesSG 3524Akhlaque ShamsiNo ratings yet
- 28W Hi-Fi Audio Power Amplifier With Mute / Stand-By: DescriptionDocument11 pages28W Hi-Fi Audio Power Amplifier With Mute / Stand-By: DescriptionbaczonifNo ratings yet
- Uc3842b 3843BDocument10 pagesUc3842b 3843Bbob75No ratings yet
- AD820 - Low Power FET Op AmpDocument24 pagesAD820 - Low Power FET Op AmpbambotsNo ratings yet
- LM392Document6 pagesLM392Brzata PticaNo ratings yet
- High Speed Can Bus Transceiver: DescriptionDocument9 pagesHigh Speed Can Bus Transceiver: Descriptionsweety987No ratings yet
- Programmable, Isolated Voltage-to-Current Converter: LoadDocument4 pagesProgrammable, Isolated Voltage-to-Current Converter: Loadhermon_agustioNo ratings yet
- Ina 168Document15 pagesIna 168Ernane FreitasNo ratings yet
- Datasheet TDA2052Document14 pagesDatasheet TDA2052FrancoilNo ratings yet
- AD654Document12 pagesAD654Christopher RiceNo ratings yet
- Ad 421Document14 pagesAd 421Vishal Devrao JadhavNo ratings yet
- Tda 8780Document16 pagesTda 8780Andrey DolgovNo ratings yet
- MC 1496Document12 pagesMC 1496Alejandro GarciaNo ratings yet
- 000 1 L6380Document9 pages000 1 L6380Ishak Khan GulamNo ratings yet
- Ca3130, Ca3130aDocument17 pagesCa3130, Ca3130aproctepNo ratings yet
- Icl 8038 DataDocument10 pagesIcl 8038 DataTushar Kanti BeraNo ratings yet
- CA3140Document20 pagesCA3140Brzata PticaNo ratings yet
- 700ma H V A C R W E C: IGH Oltage Djustable Urrent Egulator ITH Nable OntrolDocument6 pages700ma H V A C R W E C: IGH Oltage Djustable Urrent Egulator ITH Nable OntrolNathan WilliamsNo ratings yet
- Ca3140, Ca3140A: 4.5Mhz, Bimos Operational Amplifier With Mosfet Input/Bipolar Output FeaturesDocument19 pagesCa3140, Ca3140A: 4.5Mhz, Bimos Operational Amplifier With Mosfet Input/Bipolar Output FeaturesRicardo Teixeira de AbreuNo ratings yet
- 3 V To 5 V Single Supply, 200 KSPS 8-Channel, 12-Bit Sampling ADC AD7858/AD7858LDocument36 pages3 V To 5 V Single Supply, 200 KSPS 8-Channel, 12-Bit Sampling ADC AD7858/AD7858Ljnax101No ratings yet
- 4 X 25W Quad Bridge Car Radio Amplifier: DescriptionDocument11 pages4 X 25W Quad Bridge Car Radio Amplifier: DescriptionJose Juan Cuevas DiazNo ratings yet
- 60 W Hi-Fi Dual Audio Driver: DescriptionDocument12 pages60 W Hi-Fi Dual Audio Driver: DescriptionLenin BabuNo ratings yet
- 000 1 Ca3109Document20 pages000 1 Ca3109moongaboongaNo ratings yet
- ACS102-5Tx: Ac Line Switch Asd™ AC Switch FamilyDocument8 pagesACS102-5Tx: Ac Line Switch Asd™ AC Switch FamilyeduardopercicaroliNo ratings yet
- DAC0800/DAC0802 8-Bit Digital-to-Analog Converters: General DescriptionDocument0 pagesDAC0800/DAC0802 8-Bit Digital-to-Analog Converters: General DescriptionMiguel Angel García ValerioNo ratings yet
- LT 1248 FDDocument12 pagesLT 1248 FDAtiqurrehman UmairNo ratings yet
- TOREX - New Product Catalog 2011Document24 pagesTOREX - New Product Catalog 2011MAfredy LMNo ratings yet
- Features Description: SBVS017A - AUGUST 2001Document12 pagesFeatures Description: SBVS017A - AUGUST 2001Stefano Romeu ZeplinNo ratings yet
- ADC0809CCNDocument16 pagesADC0809CCNFrancesca Castelar BenalcazarNo ratings yet
- LM2907Document21 pagesLM2907leorio88No ratings yet
- AD829AQ-High Speed Video OpampDocument13 pagesAD829AQ-High Speed Video OpamphariharanccetNo ratings yet
- 105k 250v CeramicDocument20 pages105k 250v CeramicOVALLEPANo ratings yet
- 2.5A Power Switching Regulator: DescriptionDocument16 pages2.5A Power Switching Regulator: Descriptionbikram9830No ratings yet
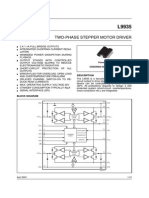
- Two-Phase Stepper Motor Driver: DescriptionDocument19 pagesTwo-Phase Stepper Motor Driver: DescriptionDan EsentherNo ratings yet
- Exelente Amplificador de 100w TDA7294Document17 pagesExelente Amplificador de 100w TDA7294Everson CorreaNo ratings yet
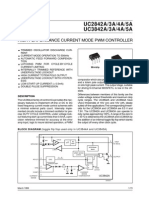
- UC2842A/3A/4A/5A UC3842A/3A/4A/5A: High Performance Current Mode PWM ControllerDocument16 pagesUC2842A/3A/4A/5A UC3842A/3A/4A/5A: High Performance Current Mode PWM ControllerCortés BernaNo ratings yet
- UC3845ANDocument15 pagesUC3845ANMiloud ChouguiNo ratings yet
- Tda 2593Document6 pagesTda 2593Luis Arturo Leiva MonjarasNo ratings yet
- Mv324 Data SheetDocument17 pagesMv324 Data SheetGianmarco CastilloNo ratings yet
- Maxim MAX1771 Boost ConverterDocument16 pagesMaxim MAX1771 Boost ConverterLeo KralNo ratings yet
- Tda 7293Document16 pagesTda 7293Gerson FelipeNo ratings yet
- Max038 Generador de FuncionesDocument17 pagesMax038 Generador de FuncionesLuis Rodolfo Reyes JimenezNo ratings yet
- Imprimir Datasheet 1Document14 pagesImprimir Datasheet 1Randy Siancas VelezNo ratings yet
- MAX038Document17 pagesMAX038Brane PetkoskiNo ratings yet
- Can Bus Transceiver: DescriptionDocument8 pagesCan Bus Transceiver: DescriptionNasiri65No ratings yet
- Adc 0808Document14 pagesAdc 0808Vikas PatelNo ratings yet
- Ivc102 DatasheetDocument15 pagesIvc102 DatasheetChristian CândidoNo ratings yet
- STK416-090-E: 3-Channel Power Switching Audio Power IC, 80W+80W+80WDocument12 pagesSTK416-090-E: 3-Channel Power Switching Audio Power IC, 80W+80W+80WChristopher Ulices Mendieta VasquezNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- 110 Waveform Generator Projects for the Home ConstructorFrom Everand110 Waveform Generator Projects for the Home ConstructorRating: 4 out of 5 stars4/5 (1)
- Audio IC Projects: A Collection of Useful Circuits Based on Readily Available ChipsFrom EverandAudio IC Projects: A Collection of Useful Circuits Based on Readily Available ChipsNo ratings yet
- Analog Circuit Design: A Tutorial Guide to Applications and SolutionsFrom EverandAnalog Circuit Design: A Tutorial Guide to Applications and SolutionsRating: 3.5 out of 5 stars3.5/5 (6)
- R 1900 B Service ManualDocument165 pagesR 1900 B Service Manualuser10h100% (1)
- IPMs V Series Application Manual IGBT PDFDocument86 pagesIPMs V Series Application Manual IGBT PDFDoDuyBacNo ratings yet
- Drive Formulae - LENZE The Compact Formula CollectionDocument108 pagesDrive Formulae - LENZE The Compact Formula Collectionhiloactive100% (1)
- X ( J / ËEÚŒ ( EÚ - EÚ Æ ( Æ "I HDocument8 pagesX ( J / ËEÚŒ ( EÚ - EÚ Æ ( Æ "I Hsuneel kumar rathoreNo ratings yet
- LP3871/LP3874 0.8A Fast Ultra Low Dropout Linear Regulators: General Description FeaturesDocument18 pagesLP3871/LP3874 0.8A Fast Ultra Low Dropout Linear Regulators: General Description FeaturesPaulo Henrique ValérioNo ratings yet
- Motor SiemensDocument15 pagesMotor SiemenshectorNo ratings yet
- Lab 1Document8 pagesLab 1Leo AzNo ratings yet
- LG GU230 Dimsun Service ManualDocument164 pagesLG GU230 Dimsun Service ManualjaimecamoNo ratings yet
- Ik4auy fst3125 141Document10 pagesIk4auy fst3125 141pchristo18549No ratings yet
- Boost Controller For Wled Driver in Medium-Sized LCD Panel: (Top View)Document14 pagesBoost Controller For Wled Driver in Medium-Sized LCD Panel: (Top View)Loengrin MontillaNo ratings yet
- EC Lab Report 1-4 - 2071-37EDocument16 pagesEC Lab Report 1-4 - 2071-37ENasir Mahmud Apar100% (1)
- CEA201Document3 pagesCEA201caothequanNo ratings yet
- Multimeters Comparison & Digital Multimeter Guide PDFDocument13 pagesMultimeters Comparison & Digital Multimeter Guide PDFnCik SukasukiNo ratings yet
- SK6812MINI: Specification Integrated Light Source Intelligent Control of Chip-On-Top SMD Type LedDocument12 pagesSK6812MINI: Specification Integrated Light Source Intelligent Control of Chip-On-Top SMD Type Ledjakalae5263No ratings yet
- Solar Usb Bycycle Power BoxDocument5 pagesSolar Usb Bycycle Power BoxVenkatareddy MulaNo ratings yet
- Introduction To VLSI Design EC 361 2 Jan 2018: 1/2/2018 Usha Gogineni 1Document17 pagesIntroduction To VLSI Design EC 361 2 Jan 2018: 1/2/2018 Usha Gogineni 1raja viriyalaNo ratings yet
- Ta 8050 PDocument9 pagesTa 8050 PJuan Alamada Reynoso100% (1)
- 5-Band Graphic Equalizer: EE 410 Final Linear Electronic Design Spring 2008Document13 pages5-Band Graphic Equalizer: EE 410 Final Linear Electronic Design Spring 2008Zeeshan JohnNo ratings yet
- Chapter 3Document12 pagesChapter 3Adet the moralistaemNo ratings yet
- Hojas Técnicas y Dimensiones de Supresores de PicosDocument8 pagesHojas Técnicas y Dimensiones de Supresores de PicosCrissCarreraNo ratings yet
- Low Voltage Low Power MemoriesDocument21 pagesLow Voltage Low Power Memoriesanusha100% (1)
- Sony Sa Ve215 Sa Wms215 Ss Ms215Document10 pagesSony Sa Ve215 Sa Wms215 Ss Ms215DJ100% (1)
- PNPN and Other Devices: Robert BoylestadDocument53 pagesPNPN and Other Devices: Robert BoylestadTe Ng0% (1)
- Chapter: Power System Author: TherajaDocument37 pagesChapter: Power System Author: TherajaHabiba AzeemNo ratings yet
- Experiment 8Document3 pagesExperiment 8Abdullah ZubairNo ratings yet
- EVT1000 ManualDocument69 pagesEVT1000 Manualpam_atw2162100% (1)
- Flip FlopDocument36 pagesFlip FlopShantanu Tripathi100% (1)
- DC-DC Step-Down FelixDocument31 pagesDC-DC Step-Down FelixGFGHJHKNo ratings yet