M.
Mirzaei, Fracture Mechanics
Fracture Mechanics
Theory and Applications
by
Majid Mirzaei
These lecture notes have been prepared as supplementary material for a
graduate level course on Fracture Mechanics. You are welcome to read
or print them for your own personal use. All other rights are reserved.
Little originality is claimed for these notes other than selection,
organization, and presentation of the material.
The major references that have been used for preparation of the lecture
notes are as follows:
References:
1.
2.
3.
4.
5.
6.
Anderson, Fracture Mechanics Fundamentals and Applications.
Meguid, Engineering Fracture mechanics
Kanninen, "Advanced Fracture Mechanics"
Broek, Elementary Engineering Fracture Mechanics
Dowling, "Mechanical Behavior of Materials"
Structural Integrity Lecture Notes, by Prof. Gray
M. Mirzaei, Fracture Mechanics
Fracture Mechanics
Lecture Notes
Majid Mirzaei, PhD
Associate Professor
Dept. of Mechanical Eng., TMU
mmirzaei@modares.ac.ir
http://www.modares.ac.ir/eng/mmirzaei
Chapter 1
Some Fundamental Aspects of Structural Design and
Failure Analysis
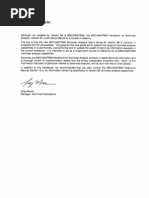
The ultimate goal in the field of applied solid mechanics is to be able to design structures
or components that are capable of safely withstanding static or dynamic service loads for
a certain period of time. In general, we may summarize the activities usually carried out
during design, manufacture, and testing of a product as shown in Fig.1.1.
Partitioning
Integration
User Requirements
User Tests
Acceptance
System
Requirements
System Tests
Verification
Architecture
Integration
Tests
Assembly
Detail Design
Sub-Systems
Tests
Manufacture
Fig. 1.1
Sub-Systems
M. Mirzaei, Fracture Mechanics
In the above process, most of the engineering decisions are based on semi-empirical
design rules, which rely on phenomenological failure criteria calibrated by means of
standard tests. The failure criteria are derived based on extensive observations of failure
mechanisms, together with theoretical models that have been developed to describe these
mechanisms.
In the view of the above arguments, one of the most important questions in the design
process is: What Constitutes Mechanical Failure?
In general, various failure mechanisms may be classified into the two broad fields of
Deformation and Fracture. A more detailed list is:
Excessive Elastic Deformation
Unstable Elastic Deformation (Buckling)
Plastic Deformation
Fracture
Fatigue
Creep
Stress Corrosion Cracking
The occurrence of each failure mode depends on various factors as depicted in Fig.1.2.
Time Scale
Short, Long
Environment
Corrosive?
Static
Time Dependent
Elastic
Permanent
Deformation
Fracture
Static
Time Dependent
Load:
Static, Dynamic
Temperature
Fig. 1.2
M. Mirzaei, Fracture Mechanics
Evolution of Structural Design
The art of structural design has drastically evolved through the history of mankind. A
rather broad, but somehow specific, classification is:
I.
II.
III.
IV.
V.
Design Based on Previous successful designs
Introduction of the Stress and Strain Concepts
Strength of Materials Approach
Theory of Elasticity Approach
Fracture Mechanics Approach
Design Philosophies
For many applications, it is sufficient to determine the maximum static or dynamic stress
that the material can withstand and then design the structure to ensure that the stresses
remain below acceptable limits. This involves fairly routine constitutive modeling and
numerical or analytical solution of appropriate boundary value problems. More critical
applications require some kind of defect tolerance analysis. In these cases, the material
or structure is considered to contain flaws and we must decide whether to replace the part
or leave it in service under a more tolerable loading for a certain period of time. This kind
of decision is usually made using the disciplines of Fracture Mechanics. In general, we
may distinguish three different design philosophies as follows:
Safe Life: The component is considered to be free of defects after fabrication and is
designed to remain defect-free during service and withstand the maximum static or
dynamic working stresses for a certain period of time. If flaws, cracks, or similar
damages are visited during service, the component should be discarded immediately.
Fail Safe: The component is designed to withstand the maximum static or dynamic
working stresses for a certain period of time in such a way that its probable failure would
not be catastrophic. For example a pressure vessel designed to work under the leakbefore-burst (LBB) condition should show leakage as a result of crack propagation. The
aim is to prevent catastrophic failure by detecting the crack at its early stages of growth
and also reducing the internal pressure.
Damage Tolerance: The component is designed to withstand the maximum static or
dynamic working stresses for a certain period of time even in presence of flaws, cracks,
or similar damages of certain geometry and size.
M. Mirzaei, Fracture Mechanics
Fracture Mechanics
Fracture mechanics is a field of solid mechanics that deals with the mechanical behavior
of cracked bodies. The wide range of applicability of the Engineering Fracture
Mechanics disciplines is shown in Fig. 1.3.
-8
10
-4
10
100
-2
10
10
Engineering Fracture Mechanics
Fig. 1.3
Historically, the first major step in the direction of quantification of the effects of cracklike defects was taken by C. E. Inglis (a professor of Naval Architecture). In 1913 he
published a stress analysis for an elliptical hole in an infinite linear elastic plate loaded at
its outer boundaries. By making the minor axis very much less than the major, a cracklike discontinuity can be modeled.
0
X2
0
X1
b
2C
0
Fig. 1.4
M. Mirzaei, Fracture Mechanics
The complete solution of the above problem can be found in the Elasticity textbooks (also in my
lecture notes on the theory of elasticity). The extremums of the stresses can be shown to be:
( )
max
= 0,
= 2 0
a
b
( ) = , 3 = 2 0
min
2 2
(1-1)
b
a
The above equations show that as b 0 (the ellipse becomes a crack) a stress singularity
develops at the crack tip.
A. A. Griffith, who was studying the effects of scratches and similar flaws on aircraft
engine components, transformed the Inglis analysis by calculating the effect of the crack
on the strain energy stored in an infinite cracked plate. He proposed that this energy,
which is a finite quantity, should be taken as a measure of the tendency of the crack to
propagate. Griffith also carried out tests on cracked glass spheres and showed that the
simple elastic analysis could be applied to describe the propagation of different size
cracks at different stress levels.
The mechanics of fracture progressed from being a scientific curiosity to an engineering
discipline primarily because of the major failures that occurred in the Liberty ships
during World War II. The Liberty ships had an all-welded hull, as opposed to the riveted
construction of traditional ship designs. Of the roughly 2700 liberty ships build during
World War II, approximately 400 sustained fractures, of which 20 were essentially total.
Fig. 1.5
After World War II, the fracture mechanics research group at the Naval Research
Laboratory was led by Dr. G.R. Irwin. Having studied the early work of Inglis, Griffith,
and others, Irwin found out that the basic tools needed to analyze fracture were already
available. Irwins first major contribution was to extend the Griffith approach to metals
by including the energy dissipated by local plastic flow.
M. Mirzaei, Fracture Mechanics
In 1956, Irwin developed the energy release rate concept, which is related to the Griffith
theory but is in a form that is more useful for solving engineering problems.
G=
d
R
dA
(1-2)
Next, he used the Westergaard approach to show that the stresses and displacements near
the crack tip could be described by a single parameter that was related to the energy
release rate. This crack tip characterizing parameter later became known as the stress
intensity factor.
a1
a2
Fig. 1.6
In practice, all this work was largely ignored by engineers as it seemed too mathematical
and it was only in the 1970's that fracture mechanics came to be accepted as a useful and
even essential tool. There were many reasons for this, for example, the development of
non-destructive examination methods which revealed hidden cracks in structures, the
demand of space industry for high-strength high integrity pressure vessels, the increasing
use of welding and the severe conditions of offshore structures, etc. Hence, most of the
practical development of fracture mechanics has occurred in the last thirty years. The
fundamental aspects of Fracture Mechanics are reviewed in Chapter 2.
M. Mirzaei, Fracture Mechanics
Elasto-Plastic Fracture Mechanics
In the regime where the global stress-strain response of the body is linear and elastic
(LEFM), the elastic energy release rate, G, and the stress intensity factor K can be used
for characterizing cracks in structures. These aspects will be discussed in Chapter 2.
In the elastic-plastic region (EPFM) also called yielding fracture mechanics (YFM), the
fracture characterizing parameters are the J-integral and the crack-tip-opening
displacement, CTOD. These aspects will be discussed in Chapter 3.
The J contour integral is extensively used in fracture mechanics, as both the energy and
the stress based criteria, for determining the onset of crack growth. Referring to Fig. 1.7,
the original form of the J-Integral for a line contour surrounding the crack tip can be
written as:
J = wdy Ti i ds
x
(1-3)
M
y
a
Ti
T
P
Fig. 1.7
In cases where fracture is accompanied by substantial plastic deformation, an alternative
description of the crack tip state has been established, designated the crack-tip-opening
displacement (CTOD) approach. This idea is based on the experimental finding that
cracks tend to open up under load, as shown below in the magnified view. The basis of
the CTOD approach is that forward propagation of the crack, as shown in the right figure,
should only occur when the CTOD reaches a specific value which is characteristic of the
material (see Chapter 3).
8
M. Mirzaei, Fracture Mechanics
CTODc
Fig. 1.8
Fatigue
It has long been known that a component subjected to fluctuating stresses may fail at
stress levels much lower than its monotonic fracture strength, due to a process called
Fatigue. Fatigue is an insidious time-dependent type of failure which can occur without
any obvious warning. It is believed that more than 95 percent of all mechanical failures
can be attributed to fatigue. There are normally three distinct stages in the fatigue failure
of a component, namely: Crack Initiation, Incremental Crack Growth, and the Final
Fracture.
Fig. 1.9
9
M. Mirzaei, Fracture Mechanics
Classical Fatigue
The classical approach to fatigue, also referred to as Stress Controlled Fatigue or High
Cycle Fatigue (HCF), through S/N or Whler diagrams, constitutes the basis of the SAFE
LIFE philosophy in design against fatigue. In order to determine the strength of materials
under the action of fatigue loads, specimens with polished surfaces are subjected to
repeated or varying loads of specified magnitude while the stress reversals are counted up
to the destruction point. The number of the stress cycles to failure can be approximated
by the WOHLER or S-N DIAGRAM, a typical example of which is given below.
Fig. 1.10
Low Cycle Fatigue
Based on the LCF local strain philosophy, fatigue cracks initiate as a result of repeated
plastic strain cycling at the locations of maximum strain concentration.
Fig. 1.11
10
M. Mirzaei, Fracture Mechanics
Fatigue Crack Propagation
If a crack exists in the component before it goes into service, for example due to weld
fabrication or from some other cause, the initiation stage is by-passed and the fatigue
failure process is taken up entirely with incremental growth and final fracture. Most
fatigue failures in practice are in the low stress region, much less than the yield stress,
where the LEFM is likely to be valid. Hence, the LEFM principles can be applied to
predict incremental fatigue crack propagation.
These aspects will be discussed in Chapter 4.
Fig. 1.12
Creep
Creep can be defined as a time-dependent deformation of materials under constant load
(stress). The resulting progressive deformation and the final rupture, can be considered
as two distinct, yet related, modes of failure. For metals, creep becomes important at
relatively high temperatures, i.e., above 0.3 of their melting point in Kelvin scale.
However, for polymers substantial creep can occur at room temperature.
11
M. Mirzaei, Fracture Mechanics
Fig. 1.13
Creep Crack Growth
The two major parameters used for correlating creep crack growth data are the stress
intensity factor K and the integral C*. The time-dependent energy Integral, C* , is similar
to the J-Integral, but is written in terms of strain rates instead of strain:
u&
& ij n j i ds
C * = wdy
x
(1-4)
These aspects will be discussed in Chapter 4.
Fig. 1.14
12
M. Mirzaei, Fracture Mechanics
Failure Analysis
One of the most significant applications of fracture mechanics is in the process of Failure
Analysis of components. Fig. 1.15 shows the cracked Girth-Gear of an industrial BallMill. These gears are up to 12 meters in diameter and over 90 tones in weight, with a
manufacturing cost exceeding $500,000. These types of gears are expected to have
fatigue lives of 20 years and more. In this case history, within the first two years of
operation, a few cracks initiated from certain locations between the gussets and the gear
flange, and propagated towards the lightening holes, as shown in Fig. 1.15b. Since the
premature occurrence of several similar cracks in certain locations could be interpreted as
the possibility of a faulty design, it was decided to perform a complete stress analysis of
the mill using the finite element method. The analysis results clearly revealed the cause
of failure, i.e., high stress built-up in specific locations adjacent to the gear flange, and
conformed to various characteristics of the existing cracks, including their propagation
paths. This work also concerned the assessment of the remaining life of the gear through
modeling of crack growth in the high-stress region. In these analyses, semi-elliptical
cracks were modeled and grown through a variable stress field, and the crack driving
forces were calculated. The calculated crack growth rates were used to estimate the
remaining life of the gear. Such information is vitally important as it gives the mill
operators a timeframe to order a new gear and plan the replacement procedure.
Meanwhile they can safely operate the mill and save thousands of dollars per working
day. More details are reported in:
Mirzaei, M., Razmjoo,A., and Pourkamali, A., "Failure Analysis of the Girth Gear of an
Industrial Ball Mill," Proceedings of the 10th International Congress of Fracture, 2001,
(ICF10) USA.
Fig. 1.15
13
M. Mirzaei, Fracture Mechanics
Failure Analysis of an Exploded Gas Cylinder
This investigation involved the determination of the cause of the explosion of a gas
cylinder containing hydrogen. The general cracking pattern of the cylinder, the
fractographic features, and the stress analysis results were all indicative of an internal
gaseous detonation. Consequently, a number of specific features of the detonation-driven
fracture of cylindrical tubes with closed ends were identified. These features included:
flap bulging, crack curving and branching adjacent to the bulged area, formation of
special markings on shear lips, and multiple cracking at the cap center. The
investigations indicated that the initial cracks were created by local excessive shear and
the crack propagations were almost entirely governed by structural waves.
Based on the above observations and using the results of the dynamic stress analysis of
the cylinder, the main characteristics of the gaseous detonation such as the initial and
peak pressures and the traveling speed were estimated and the composition of the initial
gas mixture was specified. The results showed that the content of the cylinder was a
detonable mixture of hydrogen and oxygen (35-45 vol% hydrogen) with an approximate
pressure of 2 MPa (9 percent of the working pressure of the cylinder).
The details are reported in:
Mirzaei, M., "Failure analysis of an exploded gas cylinder", Engineering Failure
Analysis , 15/7 (2008), pp. 820-834. doi:10.1016/j.engfailanal.2007.11.005
Fig. 1.16
14
M. Mirzaei, Fracture Mechanics
Chapter 2
Linear Elastic Fracture Mechanics
Fundamental Concepts
Fracture is the separation of a component into, at least, two parts. This separation can
also occur locally due to formation and growth of cracks. Let us investigate the force
required for such a separation in a very basic way. A material fractures when sufficient
stress and work are applied on the atomic level to break the bonds that hold atoms
together. Fig. 2.1 shows a schematic plot of the potential energy and force versus
separation distance between atoms.
Repulsion
Distance
Potential
Energy
Bond Energy
Attraction
Equilibrium
Spacing
-
Tension
- -
X0
Bond
Energy
Applied
Force
Cohesive Force
Compression
Fig. 2.1
The bond energy is given by:
Eb = Pdx
(2-1)
x0
15
M. Mirzaei, Fracture Mechanics
where x0 is the equilibrium spacing and P is the applied force.
A reasonable estimate of the cohesive strength at the atomic level can be obtained by
idealizing the interatomic force-displacement relationship as one half the period of a sine
wave, so we may write:
x
P = Pc sin
(2-2)
where is defined in Fig.2.1. For small displacements, we may consider further
simplification by assuming:
x
P = Pc
(2-3)
Hence, the bond stiffness (i.e., the spring constant) can be defined by:
k=
Pc
(2-4)
If both sides of this equation are multiplied by the number of bonds per unit area and the
equilibrium spacing x0 (gage length), then k can be converted to Youngs modulus E and
P to the cohesive stress c . Solving for c gives:
c =
E
x0
(2-5)
Assuming x0 , we may write Eqn (2-5) as:
E
(2-6)
For steels with the Youngs modulus of 210 GPa, the above equation estimates a fracture
stress of 70000MPa, which is almost 25 times the strength of the most strong steels!!
The reason behind the above huge discrepancy is the existence of numerous defects in
ordinary materials. These defects can be quite diverse by nature. Starting from the
atomic scale, they may include point defects (for example vacancies: atoms missing), line
defects, extra atomic planes (dislocations). On the microstructural level we may consider
defects due to grain boundaries, porosity, etc. Some of these defects may also evolve
during the processes of deformation and fracture. For instance, plastic deformation
involves various movements of dislocations which may interact and eventually result in
local damages. Plastic deformation may also lead to the formation of microvoids which
may coalesce and evolve to microcracks.
16
M. Mirzaei, Fracture Mechanics
On the other hand, the term fracture mechanics has a special meaning: description of
fractures which occur by propagation of an existing sharp crack. Hence, the assumption
of a preexisting crack is essential in fracture mechanics. It is evident that numerous
microscopic defects and/or microcracks naturally exist in ordinary materials. However,
the scope of Engineering Fracture Mechanics is almost entirely concerned with
macrocracks which are either present in the components (as a result of manufacturing
processes like welding) or develop during the service by various failure mechanisms such
as fatigue or creep.
The crack propagation can occur in many ways. For instance we may have fast-unstable
and slow-stable crack growth under monotonic loading, or a cycle by cycle growth under
alternating loads. In general, the resistance to crack growth can be defined by a special
term called the toughness of the material.
Ductile Versus Brittle
By definition, ductile fracture is always accompanied by a significant amount of plastic
deformation, while brittle fracture is characterized by very little plastic deformation (see
Fig.2.2). Both types of fracture have distinctive features on macro and micro levels.
Ductile
Brittle
Fig. 2.2
To a large extent, ductility and brittleness depend on the intrinsic characteristics of
materials such as chemical composition and microstructure. Nevertheless, extrinsic
parameters like temperature, state of stress, and loading rate may also have substantial
influences on the fracture properties of materials. In general, materials show brittleness
at low temperatures, high strain rates, and triaxial state of tensile stress.
Let us consider the deformation and fracture mechanisms of a ductile material subject to
a simple tension test during which several strength levels can be defined (see Fig.2.3).
The first level is the proportional limit, below which there is a linear relationship between
the stress and strain (point A). The second one is the elastic limit which defines the stress
level below which the deformation is totally reversible (point B).
17
M. Mirzaei, Fracture Mechanics
E
B
A
C
F
D
Stress
Test
Specimen
Gauge length
Strain
Fig. 2.3
The third level is the yield strength which marks the beginning of irreversible plastic
deformation (point C). Some materials show a clear yield point and also a lower yield
point like point D. For others the yield strength is a point that is difficult to define and, in
practice, it is defined as the intersection of the - curve and a line parallel to the elastic
portion of the curve but offset from the origin by 0.2% strain.
Beyond this point and up to the next level, which is the ultimate tensile strength (point E),
the plastic deformation is uniform along the gage length of the specimen. The inflection
point in the - curve is due to the onset of localized plastic flow or necking as depicted
in the Fig. 2.4(A). Finally, the point F represents the final fracture.
Fig. 2.4
The occurrence of necking results in a triaxial state of stress. Accordingly the plastic
deformation becomes more difficult and small particles within the microstructure start to
fracture or separate from the matrix causing microvoids, as depicted in Fig. 2.4(B). The
microscopic appearance of microvoid formation is depicted in Fig.2.5.
18
M. Mirzaei, Fracture Mechanics
Fig. 2.5
The resulting microvoids will eventually coalesce and form an internal disk-shaped crack.
The final fracture occurs by a shearing-off process of the internal crack towards the
specimen surface. The result is a typical cup-cone fracture depicted in Figures 2.4(D)
and 2.6(left).
Fig. 2.6
As mentioned before, brittle fracture is characterized by very little plastic deformation
which usually results in flat fracture surfaces as depicted in Fig. 2.6 (right). The most
important type of brittle fracture is called Cleavage. In this type of fracture, which is also
called transgranular, cracking occurs through separation of certain crystalloghraphic
planes within grains. The result is a very shiny and flat fracture surface. Another type of
fracture, called intergranular, occurs through separation of grains from each other and
can be attributed to those mechanisms that weaken the grain boundaries. Creep fracture
is a typical example.
19
M. Mirzaei, Fracture Mechanics
Linear Elastic Fracture Mechanics (Energy Approach)
The aim of this section is to present the fundamental aspects of Linear Elastic Fracture
Mechanics (LEFM) using an Energy approach. Let us start with a brief review of some
of the relevant material from the theory of elasticity.
Consider a deformable body in an equilibrium state under the influence of surface
tractions and body forces as depicted in Fig. 2.7. The virtual work can be defined as the
work done on a deformable body, by all the forces acting on it, as the body is given a
small hypothetical displacement which is consistent with the constraints present. The
virtual displacements are represented by the symbol , known as the variation operator.
In general, the loadings consist of body forces and surface tractions. The later are
prescribed over a part of the boundary designated by S . Over the remaining boundary,
designated by Su , the displacement field u is prescribed. However, it must be ensured that
u = 0 on Su to avoid violating the constraints.
T
Su
Su
f
Fig. 2.7
Accordingly, the virtual work may be defined by:
Wvirt = T. u + f . u
S
(2-7)
= Ti ui dS + f i ui dV
S
in which T and f are the surface-traction and body-force vectors, respectively. Now we
may invoke the stress boundary relations and implement the divergence theorem to
obtain:
20
M. Mirzaei, Fracture Mechanics
T u dS + f u dV =
i
ij
n j ui dS + fi ui dV
V
= ( ij ui ) + f i ui dV
,j
(2-8)
=0
= ( ij , j + f i ) ui + ij ( ui , j ) dV
In the above, ij are the components of the Cauchy stress tensor and n j are the
components of the outward unit normal to the surface. The first grouping of terms within
the last integral equals zero because of the equilibrium. The product of the symmetric
stress tensor with the skew-symmetric part of ui , j is also zero. Since the symmetric part
of ui , j is nothing but a variation in the strain tensor, we may write the following
expression known as the principle of virtual work, PVW:
T u dS + f u dV =
i
ij
ij
(2-9)
dV
The general form of the constitutive expressions for an elastic continuum can be written
as:
ij =
ij
(2-10)
in which is the density, and is the strain energy density. If we substitute the above
expression for stresses into Eq. (2-9), we will have:
T u dS + f u dV =
i
ij dV
(2-11)
ij
T u dS + f u dV = dV = dV = U
i
where U is the total strain energy stored in the body. The left side of Eq. (2-11) may be
defined as a variation in the potential energy, V , so we may write:
V = U , (U + V ) = 0, = 0
(2-12)
in which is the total potential energy of the body.
The above expression states that during the elastic deformation the external work is
converted to stored elastic strain energy, and vice versa, so that the variation of the total
potential energy is zero.
21
M. Mirzaei, Fracture Mechanics
In Fracture Mechanics, however, the total potential energy is the only source for crack
growth. Accordingly, an energy criterion for the onset of crack growth can be defined
in the following general form:
G=
d
R
dA
(2-13)
in which G is called the energy release rate (also known as the crack driving force), A is
the cracked area, and R is the resistance of the material to crack growth.
The energy release rate, G, can be considered as the energy source for the crack growth
and may be obtained from the stress analysis of the cracked geometry. On the other
hand, the resistance to crack growth (R) can be considered as the energy sink and depends
on the operating fracture mechanism. It should be mentioned that the latter depends on
many factors including: the chemical composition and microstructure of the material,
temperature, environment, loading rate, and the state of stress.
Fixed Displacement Condition
In continuation of our discussions concerning the energy approach, we will investigate
the behavior of cracked components under two distinct loading conditions.
First, suppose that we have stretched a cracked component by the amount and have
constrained it as depicted in Fig. 2.8.
P
B
-dP
a
a+da
A
Fig. 2.8
22
M. Mirzaei, Fracture Mechanics
The amount of elastic strain energy stored in the component is equal to the triangle ABD,
and the slope of the load-displacement curve represents the stiffness of the component.
Let us initially assume that the stored energy is sufficient to maintain an incremental
crack growth (da) under the fixed displacement condition. Since the component with a
longer crack has a lower stiffness, the stored elastic energy decreases to a new level equal
to the triangle ACD. Since there is no externally applied load in the system, the total
potential energy is equal to the strain energy (the only source to provide the required
energy for the crack growth). Hence, we may write:
(V = 0), ( = U ),U = Pd =
0
P
2
(2-14)
1 dU
dP
G=
=
B da
2 B da
where B is the thickness of the component.
Constant Load Condition:
Here we consider a cracked component under a constant external load P as depicted in
Fig. 2.9.
P
C
a
a+da
P
A
Fig. 2.9
The amount of elastic strain energy stored in the component is equal to the triangle ABE.
Now we assume that the available energy is sufficient to maintain an incremental crack
growth (da) under the constant load condition. The component with a longer crack has a
lower stiffness but, in this case, the stored elastic energy increases to a new level equal to
23
M. Mirzaei, Fracture Mechanics
the triangle ACD. The reason is that an excess amount of energy, provided by moving
the constant load P through the distance d (equal to rectangle BCDE), has now been
added to the system. Hence, we may write:
V = P
U = Pd =
P
2
= U V =
P
P
2
(2-15)
P
= U
2
P d
1 dU
G=
=
B da P 2 B da P
Note that in both cases the energy release rate is provided by the stored energy U and is
equal to:
1 dU
G=
(2-16)
B da
Moreover, for both cases we may write:
P
P 2 C
G=
2 B a
C=
(2-17)
dU
dU
da P
da
In the above C is the compliance of the component. The above equation can be used to
obtain G provided that the variation of compliance with the crack length is available. In
practice, various analytical, numerical, and experimental techniques are available for this
purpose.
Assignment 1:
Find the critical load for the
Component Shown in the figure
in terms of the resistance R.
Assume a >> b , a >> h.
24
M. Mirzaei, Fracture Mechanics
Example
Consider a large plate under remote uniaxial tensile stress. The plate has a central
through-thickness crack of the length 2a, as depicted in Fig. 2.10.
Fig. 2.10
The strain energy of the above system consists of two parts: the elastic energy of the plate
without crack, plus the strain energy required to introduce the crack. The latter is equal
in magnitude to the work required to close the crack by the stresses acting in its position.
U = UC + U0
= 4B
(2-18)
1
v( x) dx + U 0
2
The expression for v can be obtained from a complete stress analysis of this cracked
geometry. As will be shown later, this expression is:
v=
2
E
a2 x2
(2-19)
which shows that the crack-opening is maximum at the center of the crack and zero at its
tip. Substituting for v in Eq.(2-18) we have:
U = a 2 2
B
+ U0
E
(2-20)
which in combination with Eq.(2-15) results in:
25
M. Mirzaei, Fracture Mechanics
G=
1 dU
B da
(2-21)
2 a 2
=
E
The above equation was derived for two crack tips. Accordingly, the G expression for
each crack tip is:
G=
2 a
(2-22)
The above equation is remarkable as it shows how the energy release rate increases with
increasing the far-field stress and the crack length. We may generalize the above
equation for different components by writing it as:
G=
2 a
(2-23)
in which, is a parameter that depends on the geometry and loading condition. Now
suppose that we have an experimental specimen (similar to the one shown in Fig. 2.10
but with finite dimensions) made of a specific alloy. Also consider a real component,
made of the same material, but quite different with respect to geometry, size, loading, and
crack length (see Fig. 2.11). Also assume that we have managed to obtain the
parameter for both components and called them 1 and 2 respectively. We may perform
a fracture toughness test on the experimental specimen by gradually increasing the stress
and noting the critical stress level c at which the crack starts to grow. Accordingly, we
may obtain the critical energy release rate as:
Gc = R = 1
c2 a1
(2-24)
This quantity represents a material property called fracture toughness. On the other
hand, if the applied loading on the real component creates a far-field tensile stress around
the crack tip, there exists a similitude condition between the two components. Since the
two components are made of the same material, we may calculate the fracture stress for
the real component as follows:
Gc = R = 2
2f a2
E
(2-25)
EGc
f =
2 a2
26
M. Mirzaei, Fracture Mechanics
Finally, the obtained f can be used to calculate the amount of the external load and/or
moment associated with the onset of crack growth.
a1
a2
Fig. 2.11
In practice, however, crack growth may occur in very complicated stress fields. In
general, we consider three basic modes for crack growth, although mixed-mode growth is
also possible. Mode I is the opening or tensile mode where the crack faces separate
symmetrically with respect to the x1-x2 and x1-x3 planes. In Mode II, the sliding or inplane shearing mode, the crack faces slide relative to each other symmetrically about the
x1-x2 plane but anti-symmetrically with respect to the x1-x3 plane. In the tearing or antiplane mode, Mode III, the crack faces also slide relative to each other but antisymmetrically with respect to the x1-x2 and x1-x3 planes. The energy release rates related
to these modes are termed GI, GII, and GIII respectively. In mixed mode problems we
simply add the energy release rates of different contributing modes to obtain the total
energy release rate.
II
mode II
mode I
III
mode III
Fig. 2.12: Three basic loading modes for a cracked body: (a) Mode I, opening mode;
(b) Mode II, sliding mode; (c) Mode III, tearing mode.
27
M. Mirzaei, Fracture Mechanics
Assignment 2:
A cylindrical pressure vessel, with a diameter of 6.1 m and a wall thickness of 25.4 mm,
catastrophically failed (fractured) when the internal pressure reached 17.5 MPa. The steel
of the pressure vessel had E = 210 GPa, a yield strength of 2450 MPa, a value of GC =
131 kJ/m2.
a) Show that failure would not have been expected if the Von Mises yield criterion had
served for design purposes. b) Using the energy approach determine the size of crack
that might have caused this failure.
Crack Growth Instability Analysis
In the previous section we used the energy approach to define a criterion for the onset of
crack growth. The energy approach can also be used for the analysis of different aspects
of further crack growth such as instability, dynamic crack growth, and crack arrest. For
this purpose we use the energy diagrams as depicted in Fig. 2.13.
G3
G2
2
1
a3
a2
G1
1
a1
a1
a2
Fig. 2.13
In these diagrams, the left horizontal axis is used to define the original crack lengths from
which we may draw different lines whose slopes are related to the far-field stress. The
intersections of these lines with the vertical axis represent the energy release rate, G. The
vertical axis also represents the crack growth resistance, GC or R. In general, this
28
M. Mirzaei, Fracture Mechanics
resistance may vary as the crack grows because of different reasons such as the formation
of shear lips in the plane stress condition or non-homogeneities in material. However, for
a component made of homogenous isotropic material (with no thermal gradient) under
plane strain condition the R-Curve may be represented by a horizontal line. Fig. 2.13
shows that the crack with the length a1 under the far field stress 1 and the corresponding
energy release rate G1 cannot grow because G1 < R. In order to make it grow, we have to
increase the stress level to 2. Nevertheless, longer cracks like a2 or a3 can grow even
under 1. In the above figure, a2 represents a crack under constant load condition whose
energy release rate increases with further growth. In this case, the excess energy may
accelerate the crack and the resulting unstable growth can cause a catastrophic failure.
On the other hand, a3 represents a crack under fixed displacement condition whose
energy release rate decreases with further growth. In this case the crack may stop after a
stable growth equal to a1. In practice the crack arrest may occur at some further
distance like a2 since the crack has some stored energy which may provide the required
driving force even if the apparent G is less than R. Fig. 2.14 shows the energy diagram
with a rising R curve which usually occurs in plane stress conditions.
G3
G2
G1
a3
a2
1
a1
a1
a2
Fig. 2.14
The increase in resistance can be attributed to the formation of shear lips, which in turn
results from plastic deformations at the crack tip. We will elaborate on this issue later
when we discuss the crack tip plasticity. As depicted in Fig. 2.14, the criteria for unstable
crack growth under constant load for plane stress can be defined as:
GR ,
G R
a a
(2-26)
29
M. Mirzaei, Fracture Mechanics
Crack Speed
In this section we will obtain an estimation of the crack speed in an unstable growth
condition. The modeling is considered for an idealized situation of an infinite sheet with
a central crack of length 2a under remote tensile stress . The idea is that the surplus of
energy, represented by triangle ABC in Fig. 2.15, can be converted to the kinetic energy
of the material elements in the crack path as they move apart from each other.
As will be shown later, the horizontal and vertical displacements of these elements can be
written as:
2
u
ar fu ( )
=
v = 2 ar f ( )
v
(2-27)
ac
a
Fig. 2.15
in which fu ( ) and f v ( ) are geometric parameters. As the crack grows, its tip would
be further from the considered elements. Hence, we may assume r a and combine the
constants in the form of C1 and C2 and write:
a
a&
u = C1 E u& = C1 E
v = C a v& = C a&
2
1
E
E
(2-28)
30
M. Mirzaei, Fracture Mechanics
in which the dot means differentiation with respect to time. Accordingly, the kinetic
energy for the plate can be defined and calculated as follows:
1
( u& 2 + v& 2 )dxdy
2
1
2
= a& 2 2 ( C12 + C22 )dxdy
2
E
1
2
= k a& 2 a 2 2
2
E
EK =
(2-29)
In the above equations is the density and we have combined all the constants into a
single term k. Moreover, as a is the only characteristic length in the infinite plate, the
value of the integral was considered proportional to a 2 .
On the other hand the surplus of energy, which can be converted to kinetic energy for two
crack tips, can be defined and calculated as follows:
a
ES = 2 ( G R )da
ac
= 2 R(a ac ) + 2
ac
2
E
2 a
E
da
(2-30)
(a ac ) 2
in which ac is the initial crack length and a is the crack length at every instant. Equating
the two energies we may find the crack growth rate as:
a& =
2
k
E ac
1
a
(2-31)
A more detailed analysis of the crack tip stress field has given an estimation of 0.38 for
the first term on the right hand side of the above equation. The second term on the right
is the speed of propagation of longitudinal waves in the material, so we have:
a
a& = 0.38 VS 1 c
(2-32)
a
Based on the above expression, it is clear that there is a limit to the crack speed in every
material. Nevertheless, the speed of unstable crack growth is comparable with the speed
of propagation of sound waves in the material. This means that an unstable growth of an
initial crack with a few millimeters length may destroy several kilometers of a pipeline in
a few minutes!
31
M. Mirzaei, Fracture Mechanics
Crack Branching
Another interesting aspect of a growing crack is branching. As depicted in Fig. 2.16,
under constant load where the energy release rate increases with further crack growth,
there might be a point where the available energy becomes twice the energy required to
grow a single crack. As mentioned before, this surplus of energy usually accelerates the
crack, but if the material permits, the situation may change in favor of crack branching.
In general, when we observe that a component has been shattered into numerous pieces,
we may think of too much energy available and/or too little energy required for crack to
grow. For example we may think of the fracture caused by an explosion, or the shattering
of a glass of water slipping from your hand!
1
a1
a1
Fig. 2.16
Crack Arrest
As mentioned before, unstable crack growth may lead to catastrophic failure and must be
prevented at all cost. One practical remedy is to use riveted patches or other types of
stiffeners to simulate a fixed-displacement condition and arrest the crack.
The location of the arrester must be chosen properly by considering the kinetic energy of
the crack. As depicted in Fig. 2.17, the patch may decrease the energy down to the point
C where the crack is expected to stop after a growth equal to a2. In practice, however,
the crack may grow further until its kinetic energy is consumed. This point has been
specified in Fig. 2.17 by considering the area CDE roughly equal to ABC.
32
M. Mirzaei, Fracture Mechanics
G1
1
a1
a1
a2
a3
Fig. 2.17
LEFM, Stress Approach
Investigation of the crack-tip stress and displacement fields is important because these
fields govern the fracture process occurring at the crack tip. In subsequent sections the
stress analyses of the three major modes of crack growth will be presented.
The Mode III Problem
The analysis of Mode III is relatively simple because we may assume that u1 = u2 = 0
and u3 = u3(x1 , x2). Accordingly, we may only consider the following nonzero strain
components:
1
2
3 = u3,
(2-33)
where the Greek subscripts have the range 1, 2. Therefore, the only nontrivial stress
components are:
3 = 2 3
(2-34)
33
M. Mirzaei, Fracture Mechanics
where is the shear modulus. Accordingly, the only relevant equation of equilibrium in
the absence of body forces is:
3 , = 0
(2-35)
The above three equations can be combined to give the Laplace's equation in terms of
displacements:
(2-36)
u3, = 2u3 = 0
In order to solve the above equation we use the complex variable method which provides
a powerful technique for establishing the solutions of plane elasticity problems. The
complex variable z is defined by z = x1 + ix2 or, equivalently, in polar coordinates z = rei.
The overbar denotes the complex conjugate, z = x1 ix2. It can be shown that:
x1 = e( z ) = ( z + z ) / 2
(2-37)
x2 = m( z ) = ( z z ) / 2i
where e and m denote the real and imaginary parts respectively. Let f(z) be a
holomorphic (analytic) function of the complex variable z. A complex function is
holomorphic in a region if it is single valued and its complex derivative exists in the
region. For such a function the Cauchy-Riemann equations can be written as:
u v
v
u
=
=
,
x1 x2
x1
x2
(2-38)
Differentiating the Cauchy-Riemann equations twice and combining them, we have:
(2-39)
2u = 2 v = 0
Thus, the real and imaginary parts of any holomorphic function are solutions to Laplace's
equation. Therefore, the solution of Eq. (2-36) can be written as:
u3 =
f ( z) + f ( z)
(2-40)
Introducing Eq. (2-40) into Eq. (2-33) we may write:
1
f ( z ) + f ( z )
2
i
f ( z ) f ( z )
32 =
31 =
(2-41)
Combining Eqns (2-34) and (2-41) we have:
34
M. Mirzaei, Fracture Mechanics
31 i 32 = 2 f ( z )
(2-42)
Now, let the origin of the coordinate system be located at the tip of a crack lying along
the negative x1 axis as shown in Fig. 2.18.
xy
Fig. 2.18: Crack-tip region and coordinate system
Next, we will focus our attention upon a small region D containing the crack tip and
consider the following holomorphic function:
f ( z ) = Cz +1 , C = A + iB
(2-43)
where A, B, and are real undetermined constants. For finite displacements at the crack
tip we must have: ( z = r = 0), f 1 ). The substitution of Eq. (2-43) into Eq. (2-42)
yields:
31 i 32 = 2( + 1)Cz = 2( + 1)r ( A + iB)(cos + i sin )
(2-44)
whence,
31 = 2( + 1)r ( A cos B sin )
32 = 2( + 1)r ( A sin + B cos )
(2-45)
The boundary condition that the crack surfaces remain traction free requires that 32 = 0
on = . Consequently, we have:
A sin + B cos = 0
A sin B cos = 0
(2-46)
To avoid the trivial solution, the determinant of the coefficients of the above equations
must vanish. This requires that sin 2 = 0 , which for > 1 has the following roots:
35
M. Mirzaei, Fracture Mechanics
1
2
= , n / 2, n = 0,1, 2,...
(2-47)
Of the infinite set of functions of the form of Eq. (2-43) that yield traction-free crack
surfaces within D, the function with = 1/2 for which A = 0, provides the most
significant contribution to the crack-tip fields. For this case Eq. (2-45) becomes,
31
K III
=
1/ 2
32 (2r )
sin( / 2)
cos( / 2)
(2-48)
which is usually written as:
31
K III
=
1/ 2
32 (2 r )
sin( / 2)
cos( / 2)
(2-49)
It should be noted that the origin of the above, rather unfortunate, modification is that K
was originally considered as a way to calculate G, so the term was artificially added to
the denominator to facilitate the calculations. Also note that B has been chosen such that:
K III = lim {(2 r )1/ 2 32
(2-50)
2 K III r 2
u3 =
sin( / 2)
2
(2-51)
r 0
=0
We will also have:
1
The quantity KIII is referred to as the Mode III stress intensity factor, which is
established by the far field boundary conditions and is a function of the applied
loading and the geometry of the cracked body. Whereas the stresses associated with
the other values of are finite at the crack tip, the stress components of Eq. (2-49) have
an inverse square root singularity at the crack tip. It is clear that the latter components
will dominate as the crack tip is approached. In this sense, Eqs (2-49) and (2-51)
represent the asymptotic forms of the elastic stress and displacement fields.
The Mode I and Mode II Problems
For the Mode I problem, we assume the displacement field as u1 = u1(x1, x2),
u2 = u2(x1, x2), and u3 = 0. Accordingly we may write:
1 +
E
= 0, 33 =
3i = 0, =
3
(2-52)
36
M. Mirzaei, Fracture Mechanics
In the absence of body forces the equilibrium equations reduce to , = 0 ,
and the nontrivial compatibility equation becomes:
, , = 0
(2-53)
The equilibrium equations will be identically satisfied if the stress components are
expressed in terms of the Airy stress function, = ( x1 , x2 ) , such that:
= , + ,
(2-54)
After the insertion of Eq. (2-54) into Eq. (2-52), the compatibility equation requires that
the Airy function satisfy the biharmonic equation:
(2-55)
, = 2 ( 2 ) = 0
Note that 2 satisfies the Laplace's equation so we can write the following expression
(analogous to the antiplane problem):
(2-56)
2 = f ( z) + f ( z)
where f(z) is a holomorphic function. Eq. (2-56) can be integrated to yield the following
real function. [More details can be found in my lecture notes on the theory of elasticity,
(Chapter 3. 2D Static Boundary Value Problems: Plane Elasticity)].
=
1
z ( z ) + z ( z ) + ( z ) + ( z )
(2-57)
where ( z ) and ( z ) are holomorphic functions.
Now, we may substitute the above expression into Eq. (2-54) to write:
11 + 22 = 2 ( z ) + ( z )
(2-58)
22 11 2i 12 = 2 z ( z ) + ( z )
Due to symmetry with respect to the crack plane we choose a solution of the form:
= Az +1 , = Bz +1
(2-59)
where A, B, and are real constants. To avoid singular displacements at the crack tip, we
should set > 1.
The introduction of Eq. (2-59) into Eq. (2-58) yields:
37
M. Mirzaei, Fracture Mechanics
22 i 12 = ( + 1)r { A [ 2 cos + cos( 2) ]
+ B cos i [ A sin( 2) + B sin ]}
(2-60)
which must vanish for = . Consequently, we may write:
A(2 + ) cos + B cos = 0
A sin + B sin = 0
(2-61)
The existence of a nontrivial solution for the above set of equations requires that
sin 2 = 0 , which for > 1 gives the following roots:
1
2
= , n / 2, n = 0,1, 2,...
Again, the dominant contribution to the crack-tip stress and displacement fields occurs
with = 1/2, for which A = 2B. Similar to the antiplane problem, an inverse square root
singularity in the stress field exists at the crack tip. Substituting Eq. (2-59), with A = 2B
and = 1/2, into Eqs (2-58) and (2-60), we find that:
11
1 sin( / 2) sin(3 / 2)
KI
cos( / 2) sin( / 2) cos(3 / 2)
12 =
1/ 2
(2r )
1 + sin( / 2) sin(3 / 2)
22
(2-62)
which is usually written as:
11
1 sin( / 2) sin(3 / 2)
KI
cos( / 2) sin( / 2) cos(3 / 2)
12 =
1/ 2
(2 r )
1 + sin( / 2) sin(3 / 2)
22
(2-63)
Accordingly, the Mode I stress intensity factor K, is defined as:
K I = lim {(2 r )1/ 2 22
r 0
=0
(2-64)
The displacements can be written as:
1
2
u1 K I r 2 cos( / 2) 1 + 2sin ( / 2)
=
2
u2 2 2 sin( / 2) + 1 2 cos ( / 2)
(2-65)
When the foregoing is repeated with A and B being pure imaginary, the following
equations can be obtained for the Mode II problem:
38
M. Mirzaei, Fracture Mechanics
11
K II
12 =
1/ 2
(2 r )
22
sin( / 2) [ 2 + cos( / 2) cos(3 / 2]
cos( / 2) [1 sin( / 2) sin(3 / 2) ]
sin( / 2) cos( / 2) cos(3 / 2)
1
2
u1 K II r 2 sin( / 2) + 1 + 2 cos ( / 2)
=
2
u2 2 2 cos( / 2) 1 2sin ( / 2)
K II = lim {(2 r )1/ 2 12
r 0
=0
(2-66)
(2-67)
(2-68)
Finally, we may summarize the expressions derived for different modes by considering
the following general expression for the stresses in a cracked body:
ij =
K
fij ( ) + L
2 r
(2-69)
It is clear that the first term is dominant very near to the crack tip. As we move further
from the crack tip the singular term weakens and the additional terms become significant.
As depicted in Fig. 2.19, equal stress intensity factors for two different cracks with
different lengths in different geometries under different loadings ensure similar crack tip
stress fields. Hence, the critical stress intensity factor Kc, obtained at the onset of crack
growth for a specific material and geometry, can be interpreted as a mechanical property
named fracture toughness.
Fig. 2.19
39
M. Mirzaei, Fracture Mechanics
Williams General Solution
The most general solution for cracks under generalized in-plane loading was provided by
Williams. The solution starts by considering stresses at the corner of a plate under
different boundary conditions and corner angles . Here, a crack is treated as a special
case where the angle of the plate corner is 2 and the surfaces are traction free, as
depicted in Fig. 2.20.
The general stress function proposed by Williams is:
= r +1 c1 sin ( + 1) * + c2 cos ( + 1) * + c3 sin ( 1) * +c4 cos ( 1) *
= r +1 F ( *, )
(2-70)
where c1 , c2 , c3 , and c4 are constants. Using the relevant expressions in polar
coordinates, the following expressions can be obtained for the stresses:
1
1
, + ,r = r 1 F + ( + 1) F
2
r
r
1
= ,rr = r ( + 1) F
rr =
1
r
r = ,r +
(2-71)
1
, = r 1 ( F )
2
r
In the above expressions, primes denote derivatives with respect to .
Fig. 2.20
It can be shown that the displacements vary with r . Thus, in order to have finite
displacements everywhere, we must have > 0. Also, the crack faces are traction free,
which implies the following equalities:
F (0) = F (2 ) = F (0) = F (2 ) = 0
(2-72)
To ensure a nontrivial solution we must set sin 2 = 0 , which for > 0 has the roots:
40
M. Mirzaei, Fracture Mechanics
= n / 2, n = 1, 2,...
(2-73)
Accordingly, the most general form for the stress function and the resulting stresses can
be written as:
n2 +1
n
= r F *,
2
n =1
1
fij *, M m
2
+ r 2 fij ( *, m )
ij =
r
m=0
(2-74)
where f is a function of F and its derivatives. Eventually, the above expressions result in
general expressions in the form of Eqs. (2-69) for the Mode I and the Mode II crack
problems. Again, it is clear that the first term is dominant very near to the crack tip. As
we move further from the crack tip the singular term weakens and the additional terms
become significant.
Design Philosophy Based on LEFM
So far we have learned that cracks may start growing when the stress intensity factor
(SIF) reaches a critical value Kc, called fracture toughness. Later we will show that
the SIF can be related to the far-field stress and crack length by the following general
expression:
(2-75)
K = Y a Kc
in which Y is a geometric factor (see Fig.2.26). Thus for the design of a cracked or
potentially cracked structure we have to decide what design variables can be selected, as
only two of these variables can be fixed and the third must be determined. For example
we may select a special steel to resist a corrosive liquid, so Kc is fixed, and the design
stress level may also be fixed due to weight considerations. In this case we may calculate
the maximum size of tolerable cracks using Eq. (2-75).
Based on the above arguments it is clear that the application of LEFM in design
procedures usually involves the following activities:
1. Measurement of the critical stress intensity factors that cause fracture for the material.
2. Determination of the size and location of cracks in the structure or component.
3. Calculation of the stress intensity factors for the cracks in the structure or component
for the anticipated loading conditions.
41
M. Mirzaei, Fracture Mechanics
Fig. 2.21
The first item will be discussed after the concept of crack tip plasticity is introduced. The
second task can be performed using some kind of non-destructive test techniques.
Examples of such techniques are ultrasound and x-ray techniques, and inspection with
optical microscopy. If the crack is detected, most of these techniques will provide an
estimation of the crack length. If not, one should assume for design purposes that the
structure contains cracks that are just too short to be detected.
The third activity, i.e. calculation of the stress intensity factors, can be performed using
various techniques, including:
1. Finding the analytic solution to the full linear elastic boundary value problem, and
deducing stress intensities from the asymptotic behavior of the stress field near the crack
tips.
2. Deducing the stress intensity factors from energy methods (In the next section we will
discuss the related relationships).
3. Using experimental techniques
4. Using numerical methods such as boundary integral and finite element methods.
K-G Relationship
So far we have discussed two different criteria, based on energy considerations and crack
tip stress field, for the onset of crack growth. Naturally, there should be a relationship
between the two. In this section we will discuss this relationship. Fig. 2.22 depicts a
crack of initial length a subject to Mode I loading with the origin located at a distance
behind the crack tip.
42
M. Mirzaei, Fracture Mechanics
Y
Fig. 2.22
Now assume that we may partially close the crack through application of a compressive
stress field to the crack faces between x = 0 and x = . The required work is:
W = 2
yv
2
(2-76)
dr
The factor of 2 on work is required because both crack faces are displaced. In the above
y is the compressive stress distribution and v is the crack opening displacement. As
this work will be released as energy, the energy release rate G can be written as:
W
2 v
= lim y dr
0 0
2
G = lim
0
(2-77)
We may define the stresses and displacements in terms of the stress intensity factor as:
y =
2
v=
E
KI
2 r
2KI
a x =
E
2
(2-78)
a2 x2
a
Noting that x = r + a and neglecting the second order terms in our calculations, we
may rewrite the above as:
43
M. Mirzaei, Fracture Mechanics
2K I
E
2K I
=
E
v=
2 2r +
2r r 2
a
a
(2-79)
2( r )
Substituting the above into Eq. (2-77), we have:
(2-80)
2 K I2 r
dr
0 E 0
r
G = lim
The result of integration is:
(2-81)
K I2
G=
E
which can be modified for plane strain as follows:
G = (1 2 )
(2-82)
K I2
E
The above expressions are general relationships between K and G for Mode I. However,
the analysis procedure can be repeated for other modes of loading. When all three modes
of loading are present, the energy release rate is given by:
G = GI + GII + GIII
= (1 v 2 )
(2-83)
K I2
K2
K2
+ (1 v 2 ) II + (1 + v) III
E
E
E
As mentioned before, the three modes are additive with respect to energy release rate
because it is a scalar quantity. However, it should be noted that the above equation
assumes self similar crack growth, i.e., a planar crack is assumed to remain planar and
maintain a constant shape as it grows. This is usually not the case for mixed-mode
fractures.
Assignment 3:
A thin-walled cylinder contains a crack
forming an angle 30 degree to the longitudinal
axis. Numerical data: radius R = 0.2 m, crack
half-length a and wall thickness t are a = t =
0.005m, fracture toughness Kc = 50 MPa m .
Determine at which torque T crack may start to grow.
44
M. Mirzaei, Fracture Mechanics
Mixed Mode Fracture
When we are dealing with an angled crack (similar to that depicted in Fig. 2.23), the first
question is naturally about the magnitude of the far-field stress at which the crack starts
to grow. The second question is how to determine the direction of further crack growth.
Y
r
Fig. 2.23
The first question can be answered by the methods described in the previous section,
while there are two general approaches for predicting the direction of crack growth. In
the first approach, it is assumed that the crack growth occurs in the direction
perpendicular to the maximum tangential stress at (or near) the crack tip. The second
approach considers crack growth in the direction for which the strain energy density is
minimal, on the basis that this corresponds to a maximum in energy release rate. The
strain energy density in the vicinity of the crack tip may be written as:
1
S ( )
a11 K I2 + 2a12 K I K II + a22 K II2 ) =
(
r
r
1
a11 =
[ (1 + cos )(k cos )]
16
1
a12 =
sin (2 cos k + 1)
16
1
a22 =
[ (k + 1)(1 cos ) + (1 + cos )(3cos 1)]
16
where k = (3 4 ) for plane strain, and k = (3 ) /(1 + ) for plane stress.
45
(2-84)
M. Mirzaei, Fracture Mechanics
According to this criterion the crack starts to grow when S reaches a critical value Sc, and
the direction of crack growth is given when S is a minimum:
(2-85)
d 2S
>0
d 2
dS
= 0,
d
For example, for pure mode I we have:
S I ( ) min = S I ( = 0 ) = a11 K c2
2(k 1) 2
Sc =
Kc
16
(2-86)
For the angled crack shown in Fig. 2.23, the strain energy density can be obtained based
on the following expressions for the stresses:
1
3
KI 5
4 cos 2 4 cos 2
2 r
3 3
K II 5
2
+
4 sin 2 + 4 sin 2 + t cos
2 r
1
3 K II 3 3
3
KI 3
2
=
4 cos 2 + 4 cos 2 +
4 sin 2 4 sin 2 + t sin
2 r
2 r
1 3 K II 1
3
3
KI 1
=
4 cos 2 + 4 cos 2 t sin cos
4 sin 2 + 4 sin 2 +
2 r
2 r
rr =
r
(2-87)
where we have;
K I = a sin 2
, K II = a sin cos
t = sin
2
46
(2-88)
M. Mirzaei, Fracture Mechanics
Stress Intensity Factor
A major activity in the design process based on fracture mechanics is the determination
of the stress intensity factor for the particular problem. In the following sections we will
discuss some of the pertinent analytical, experimental, and numerical methods.
Analytical Determination of SIF
In this section we drive the stress intensity factor expression for an infinite plate with a
central crack of length 2a, under remote stress 0 (see Fig. 2.24).
0
y
xy
Fig. 2.24
We use the general form of the Westergard stress function as follows:
(2-89)
= e + y m
for which we can define the integration and differentiation operations with respect to z as:
= dz
= dz
= dz
d
=
dz
d
=
dz
d
=
dz
(2-90)
47
M. Mirzaei, Fracture Mechanics
Writing the Cauchy-Riemann equations we have:
d
m e
=
e
dz
y
x
d
e m
=
m
dz
y
x
(2-91)
Using Eq. (2-91), we can differentiate Eq. (2-89) with respect to y and write:
(2-92)
, y = m + m + y e y e
Accordingly, we can calculate the stresses using the following Equations:
xx = , yy = e y m
(2-93)
yy = , xx = e + y m
Now, we should choose a stress function that satisfies the local and global boundary
conditions of this problem. Let us check the following stress function:
=
0z
(2-94)
z2 a2
The global and local boundary conditions are:
B.C.1 x, y z xx = yy = 0
B.C.2 y = 0, x = a, = xx = yy =
(2-95)
B.C.3 y = 0, a < x < a, e = 0 xx = yy = 0
Note that the proposed stress function satisfies these conditions. Now we translate the
origin to the crack tip.
=
0 ( z + a)
( z + a) a
2
(2-96)
2
Since we are interested in very near field stresses where z << a , we neglect the z2 term
and write,
1
a
=
0z 2
2
Next we switch to polar coordinates with z = rei and write Eq. (2-97) as,
48
(2-97)
M. Mirzaei, Fracture Mechanics
(2-98)
a
0 [cos( / 2) i sin( / 2)]
2r
Hence, for the normal stress component on the crack line near the tip we have:
22
=0
= e
=0
(2-99)
a
0
2r
Finally, using the original definition of KI for the Mode I problem, we may write:
K I = lim {(2 r )1/ 2 22
r 0
=0
0
K I = lim (2 r )1/ 2
r 0
2r
(2-100)
KI = 0 a
In practice, the far field stress in the x direction does not have any effect on the crack tip
stress field. Hence, the above expression for K is also applicable when the sheet is under
uniaxial far-field stress in the Y direction.
It is possible to obtain the K-expression using the principle of superposition. Thus, for the
geometries shown in Fig. 2.25 we may write:
K Ia + K Ib = a
K Ia + 0 = a
(2-101)
K Ia = a
Fig. 2.25
49
M. Mirzaei, Fracture Mechanics
Fig. 2.26
50
M. Mirzaei, Fracture Mechanics
Elliptical Cracks
For many real components cracking starts at free surfaces. These cracks often have semielliptical or quarter-elliptical shapes. There may also be elliptical cracks embedded in
components. Because of their importance, significant research has been done on
modeling and quantification of the effect of elliptical cracks in different structures under
various types of loadings. A solution for an embedded elliptical crack for an infinite
domain derived by Irwin is:
KI =
4
a2
2
+
sin
cos 2
2
b
(2-102)
in which a and b are defined in Fig. 2.27, is measured counterclockwise from the point
B, and is an elliptical integral of the second kind defined by:
1
/2
b2 a 2
2
2
1
sin
d
b2
(2-103)
Values for are reported in the form of tables and graphs. It is also possible to find an
approximation to the above integral using a series expansion and write the K expression
as:
a
KI =
3 a 2
8
8b 2
2
4
a2
+
sin
cos 2
2
b
(2-104)
From the above expression it is obvious that K I varies along the crack front. Its
magnitude is largest at the end of the minor axis and lowest at the end of the major axis
as follows:
K I (max) =
K I (min) =
(2-105)
a2
b
A correction factor of 1.12 is usually considered for the part-through semi-elliptical
cracks. For the quarter-elliptical corner crack the factor is 1.2. We may also use the
general expression K I = Y b and find the Y factor from the following diagrams.
51
M. Mirzaei, Fracture Mechanics
Fig. 2.27
52
M. Mirzaei, Fracture Mechanics
Experimental Determination of SIF
The different methods used for experimental determination of stress intensity factors
belong to a broader domain called experimental stress analysis. Here, we briefly review
the usage of electrical resistance strain gages and the method of photoelasticity. An
excellent source for detailed study of these and other methods, such as laser
interferometry and the method of Caustics, is: Dally, J. W., Riley, W. F., Experimental
Stress Analysis, 3rd edition, 1991. Also are the lecture notes on experimental stress
analysis, provided by James W. Phillips, Department of Theoretical and Applied
Mechanics, University of Illinois at Urbana-Champaign.
Strain Gage Method
The stress intensity factor can be determined experimentally by placing one or more
strain gages near the crack tip. However, to avoid severe strain gradients, the gages
should not be placed at very near field. On the other hand, as we move further from the
crack tip, we need more terms to be able to express the field parameters correctly. The
three-term representation of the strain field is:
E xx = A0 r
1
2
3
cos (1 ) (1 + ) sin sin + 2 B0
2
2
2
1
2
+ A1r cos
E yy = A0 r
1
2
(1 ) (1 + ) sin 2
2
2
3
cos (1 ) (1 + ) sin sin 2 B0
2
2
2
(1 ) (1 + ) sin 2
2
2
1
1
3
= A0 r 2 sin cos A1r 2 sin cos
2
2
1
2
+ A1r cos
2 xy
(2-106)
where A0 , B0 , and A1 are unknown coefficients which depend on loading and the
geometry of the specimen. For instance we have:
A0 =
(2-107)
KI
2
In general, we need three strain gages to be able to determine the above three unknowns.
However, it can be shown that it is possible to use only one gage oriented at angle and
positioned along the Px axis, as shown in Fig. 2.28.
53
M. Mirzaei, Fracture Mechanics
Fig. 2.28
Accordingly, the stress intensity factor can be determined from:
2 E xx =
KI
2 r
1
3
1
3
k cos 2 2 sin sin 2 cos 2 + 2 sin cos 2 sin 2
(2-108)
where,
k=
1
1 +
(2-109)
The choice of the angles and depend on the Poissons ratio and can be determined
from the table below.
Table 2.1
For the choice = = 60 , the required expression is very simple:
KI = E
(2-110)
8
r xx
3
54
M. Mirzaei, Fracture Mechanics
Photoelasticity Method
Photoelasticity is a whole-field stress analysis technique based on an optical-mechanical
property called birefringence, possessed by many transparent polymers. A loaded
photoelastic specimen, combined with other optical elements, and illuminated with an
ordinary light source exhibits fringe patterns that are related to the difference between the
principal stresses in a plane normal to the light propagation direction.
A polariscope is needed for viewing the fringes induced by the stresses (see Fig. 2.29).
Two types of pattern can be obtained: isochromatics and isoclinics. The former is related
to the principal-stress differences and the latter to the principal stress directions.
Fig. 2.29
The sensitivity of a photoelastic material is characterized by its fringe constant f . This
constant relates the value N associated with a given fringe to the thickness h of the
specimen in the light-propagation direction and the difference between the principal
stresses in the plane normal to the light-propagation direction as follows:
1 2 =
(2-111)
Nf
h
In practice, the principal stresses are obtained from the stresses defined in Eq. (2-63) and
combined with Eqn. (2-111) to give:
55
M. Mirzaei, Fracture Mechanics
2
1 2 = 2 11 22 + 122
2
KI
=
sin
2 r
KI =
(2-112)
2 r f N
h
For example, let us calculate the value of the stress intensity factor for the specimen
shown in Fig. 2.30.
Fig. 2.30
Suppose that the fringe designated with number 5 is located at the distance 0.23 in. from
the crack tip, the material fringe value is 43, and the specimen thickness is 0.213 in. The
magnitude of the stress intensity factor can be calculated as:
2 r f N
h
2 (0.23)(43)(5)
=
= 1.2 ksi in
0.213
KI =
(2-113)
56
M. Mirzaei, Fracture Mechanics
Numerical Determination of SIF
For most practical problems, either there is no analytical solution, or the available
solutions are only crude approximations. Hence, numerical techniques play a very
important role in determination of SIFs for real components. Numerical methods for
fracture mechanics can be categorized in many different ways. We will explore some
aspects of the so called computational fracture mechanics as we proceed in this course.
A brief explanation of different approaches to numerical determination of SIF follows:
Ordinary and Extended Finite Element Methods
In the finite element method (FEM), the structure of interest is subdivided into discrete
shapes called elements. Different Element types can be used to cover the problem
domain. The elements are connected at node points where continuity of the displacement
fields is enforced. The displacements at the nodes depend on the element stiffness and the
nodal forces. For structural problems, the solution of the problem consists of nodal
displacements. The stress and strain distribution throughout the body, as well as the
crack parameters such as SIF, can be inferred from the nodal displacements. A number
of commercial FEM packages have the ability for crack modeling and fracture mechanics
calculations. There is also a very useful noncommercial code, called FRANC2D, which
is developed in Cornell University. The code is surprisingly easy to learn and work with
and has many capabilities, This is an ideal code for education and research. It can be
downloaded at http://www.cfg.cornell.edu/software/software.htm.
In the Extended Finite Element Methods (X-FEM), a discontinuous function and the twodimensional asymptotic crack-tip displacement fields are added to the finite element
approximation to account for the crack, using the notion of partition of unity. This
enables the domain to be modeled by finite elements with no explicit meshing of the
crack surfaces. The initial crack geometry is represented by level set functions, and
subsequently signed distance functions are used to compute the enrichment functions that
appear in the displacement-based finite element approximation. The method has basically
been developed in Northwestern University.
Boundary Element Methods
The problems in science and engineering are usually solved mathematically through
specifying appropriate boundary conditions. Given these boundary conditions, it is
theoretically possible to solve for the tractions and the displacements on the boundary, as
well as the stresses, strains, and displacements within the body. The boundary integral
equation method (BIE) is a very powerful technique for solving for unknown tractions
and displacements on the surface. This approach can also provide solutions for internal
field quantities, but finite element analysis is more efficient for this purpose. The BIE
formulation leads to a set of integral equations that relate surface displacements to
surface tractions. In order to solve for the unknown boundary data, the surface must be
subdivided into segments (i.e., elements), and the boundary integrals are approximated by
a system of algebraic equations. Once all of the boundary quantities are known,
57
M. Mirzaei, Fracture Mechanics
displacements at internal points can be computed. The boundary elements have one less
dimension than the body being analyzed, i.e., the boundary of a two-dimensional problem
is surrounded by one-dimensional elements, while the surface of a three-dimensional
solid is paved with two-dimensional elements. Consequently, boundary element analysis
can be very efficient, particularly when the boundary quantities are of primary interest.
This method is inefficient, however, when solving for internal field quantities.
The noncommercial FRANC3D code, along with OSM (solid modeler) and BES (3D
BIM solver) codes provide a powerful set for analyzing fracture mechanics problems.
These codes are developed in Cornell University can be downloaded at
http://www.cfg.cornell.edu/software/software.htm.
Mesh Free Methods
These methods are relatively new and still in the stage of development, but they possess
some interesting features that make them strong candidates for computational fracture
mechanics in the future. In these methods the problem domain is represented by a set of
arbitrarily distributed nodes. There is no need to use meshes or elements for field
variable interpolation. The density of nodes can be chosen high near discontinuities like
cracks. In contrast to FEM, there is no need for conformation of mesh with cracks and
this makes the modeling of evolving cracks easier.
Determination of SIF using FEM
In general, we may consider two different approaches for determination of SIF using
FEM, i.e., the point matching and the energy methods. The former technique is based on
inferring the stress intensity factor from the stress or displacement fields in the body. In
the latter the energy release rate is first computed and the stress intensity is obtained
using Eqs. (2-81) and (2-82).
Displacement Extrapolation
Following a liner elastic analysis, the stress intensity factor can be determined by
equating the numerically obtained displacements with their analytical expression in terms
of the SIF. For example, the mode-I displacement equations are:
ui =
KI
G
r
fi ( , )
2
(2-114)
Using the above expression we may obtain a quantity K I using the nodal point
displacement ui at some point (r , ) close to the crack tip as follows:
58
M. Mirzaei, Fracture Mechanics
K I =
(2-115)
2
G [ f i ( , ) ] ui
r
The stress intensity factor can be inferred by plotting the quantity K I against the distance
from the crack tip and extrapolating to r = 0.
This technique was the predominant one prior to the discovery of the quarter point
singular element. In early finite element studies of LEFM, it was recognized that unless
singular elements were used, it would be necessary to have a very fine mesh at the crack
tip to approximate the stress singularity with non-singular elements.
Singular Elements
It is interesting to note that certain element/node configurations can produce strain
singularities. Forcing the elements at the crack tip to exhibit a strain singularity greatly
improves the accuracy and reduces the need for a high degree of mesh refinement at the
crack tip. It has been shown that ordinary quadratic isoparametric elements can be
degenerated to give desired singularity by moving the mid-side nodes to the l/4 points.
Fig. 2.31
Energy Approach, Elemental Crack Advance
We have already shown that the energy release rate can be obtained from the rate of
change in the total potential energy with crack growth. Assume a two-dimensional body
with unit thickness. If two separate numerical analyses are performed (one with the crack
length a and the other with the crack length a + a) the energy release rate is given by:
(2-116)
G =
a
59
M. Mirzaei, Fracture Mechanics
This technique is easy to implement because the total strain energy is a natural output by
many commercial analysis codes. This technique is also more efficient than the point
matching methods because the global energy estimates do not require refined meshes.
One disadvantage of this method is that it requires multiple solutions, while other
methods infer the desired crack tip parameter from a single analysis.
Assignment 4:
Consider a center-cracked plate of the
AISI 4340 steel (E = 210 GPa, = 0.3),
which has dimensions, as follows: width
2W = 76 mm; length-to-width ratio
2H/2W = 5; and thickness B = 6 mm. The
plate contains an initial crack of length
(half) a = 1 mm. It is subjected to a
tension loading of P = 240 kN. Compute
the SIF using the available closed form
solutions and FEM. Compare the results.
Energy Method, Virtual Crack Extension, Stiffness Derivative Formulation
In this section we will briefly explain the method developed by Parks and Hellen.
Consider a two-dimensional cracked body with unit thickness, subject to Mode I loading.
The potential energy of the body, in terms of the finite element solution, is given by:
(2-117)
1 T
T
[u] [ K ][u ] [u ] [ F ]
2
Accordingly, it can be shown that the energy release rate is proportional to the derivative
of the stiffness matrix with respect to crack length.
G=
1 T [K ]
d
= [u ]
[u ]
2
da
a
(2-118)
The implementation of the above expression does not require changing all of the
elements in the mesh. Instead, we may accommodate the crack growth by moving only
the elements near the crack tip as illustrated in Fig. 2.32.
60
M. Mirzaei, Fracture Mechanics
Fig. 2.32
Each of the elements between 0 and 1 is distorted such that its stiffness changes. The
energy release rate is related to this change in element stiffness as follows:
G=
where
1 T NC [ K i ]
[u ]
[u ]
2
i =1 a
[ Ki ]
(2-119)
are the elemental stiffness matrices and NC is the number of elements
between 0 and 1. It should be noted that in this analysis it is sufficient merely to
calculate the change in elemental stiffness matrices corresponding to shifts in the nodal
coordinates and there is no need to generate a second mesh with a longer crack. One
problem with the stiffness derivative approach is that it involves cumbersome numerical
differentiation. A more recent formulation of the virtual crack extension method
overcomes these difficulties as discussed below.
Energy Method, Virtual Crack Extension, Continuum Approach
In this section we will briefly explain the method developed by deLorenzi. Fig. 2.33
illustrates a virtual crack advance in a two-dimensional continuum. Material points inside
0 experience rigid body translation a distance a in the x1 direction, while points outside
of 1 remain fixed. In the region between contours virtual crack extension causes material
points to translate by x1. For an elastic material, deLorenzi showed that energy release
rate is given by:
G=
x1
1 u j
w i1
dA
ij
a A
x1
xi
(2-120)
where w is the strain energy density and the crack growth is assumed in the x1 direction.
The integration need only be performed over the annular region between 0 and 1.
61
M. Mirzaei, Fracture Mechanics
Fig. 2.33
*Calculation of SIF using the concept of Energy-Domain Integral will be
discussed in Chapter 3.
Crack Tip Plasticity
As it was shown before, under LEFM assumptions, the magnitude of stress at the crack
tip is theoretically infinite. However, it is obvious that every material has a finite strength
and, as a result, there will always be a small damaged zone around the crack tip. For
metals, this damaged zone is referred to as the crack tip plastic zone. For materials like
ceramics and concrete it is often called fracture process zone.
The question is how the use of LEFM parameters like G and K can be justified under
these circumstances. The answer relies on the spread of the damage zone compared to
the size of what we may call the K-dominant region. By the latter we mean the small
region around the crack tip for which the states of stress, strain, and displacement are
determined by the singular term (first term) of Eq. (2-69). If the size of the damaged
zone is small enough that it is contained within the K-dominant region, we may conclude
that the similitude condition exists. Hence, different cracks with equal stress intensity
factors will have equal damaged zones and behave similar to each other. On the other
hand, if this zone is larger than the K-dominant region then our linear elastic assumptions
are not correct, i.e., LEFM is not applicable and a nonlinear model must be used.
62
M. Mirzaei, Fracture Mechanics
Size of the plastic zone
Based on the above arguments, it seems necessary to have a reliable estimate of the size
of the crack-tip plastic-zone. We start by considering the plane stress condition and
assume that the boundary between the plastic and elastic regions is the locus of the
stresses (given by Eq. (2-63)) which satisfy a yield criterion. However, as a first
approximation, we assume that yielding occurs when 22 equals the uniaxial yield
strength of the material ( ys ). On the crack plane we have = 0 and the normal stress
22 in a linear elastic material is given by Eq. (2-63).
22
ys
r
ry
Fig. 2.34
Substituting the yield strength into the left side of Eq. (2-63) and solving for r gives a
first order estimate of the plastic zone size:
KI
2 r
KI
ys =
2 ry
22 =
ry =
K I2
2 ys2
(2-121)
=
2a
2 ys2
However, as depicted in Fig. 2.34, we have actually ignored the load represented by the
hatched area in our derivation. It can be expected that due to this extra load the actual
plastic zone size should be larger than ry .
Irwin Plastic zone correction
In order to give a better estimation of the plastic-zone size, Irwin argued that
consideration of a larger plastic zone may be taken equivalent to the assumption of a
63
M. Mirzaei, Fracture Mechanics
larger crack. This can be readily seen from the last expression of Eqs. (2-121). Hence,
we may define an effective crack length whose length is equal to the size of the actual
crack plus a correction . The next step is to repeat the previous procedure for plastic
zone size estimation for the effective crack. However, we consider the extra length
large enough to carry the extra load ignored by truncating the asymptotic stress
distribution.
22
ys
a
aeff
Fig. 2.35
Hence, we may write:
ys =
KI
a+
2
2
2 (a + )
ry
2 ys2
(2-122)
Equating the two hatched areas, we have:
ys =
0
a+
dr ys
2r
(2-123)
Since is small, it can be neglected compared to the crack length in the above integration
and we may write using Eq. (2-122):
( + r )
y
ys
= 2ary
( + ry ) =
2
2 2 a
2
ys
(2-124)
ry 4ry2
= ry
It turns out that the new plastic zone size is twice as large as our first estimate:
64
M. Mirzaei, Fracture Mechanics
1K
rp = + = 2ry = I
ys
(2-125)
The main effect of plasticity is that the stresses close to the crack tip are relaxed by
yielding at the expense of increased stresses outside the plastic zone. The effect of the
plastic zone on the stress intensity factor might then be approximated by adding half the
plastic zone length to the real crack before calculating K as follows:
K I = ( a + ry )
(2-126)
Of course this procedure should be limited to ry << a . Thus, the calculation procedure for
plastic zone size adjustment consists of calculating the elastic stress intensity based on
the real crack length, calculating the plastic zone dimension through Eq. (2-121), adding
it to the real crack length, and recalculating the stress intensity through Eq. (2-126).
Crack Tip Opening Displacement
One key advantage of plastic-zone correction is that it gives a meaning to the crack-tipopening displacement (CTOD). It is clear that CTOD, obtained from a linear elastic
analysis, is zero.
2
a2 x2
E
4
=
a2 x2
E
v=
(2-127)
x =a
=0
However, if we introduce the effects of crack tip plasticity, we will have:
aeff = a + ry t =
4
E
a 2 + 2ary + ry 2 a 2
(2-128)
4
2ary
E
4 K I2
CTOD t =
E ys
ry 0 t =
We will use the concept of CTOD in relation with the crack tip plastic deformation in our
discussions on elasto-plastic fracture mechanics.
65
M. Mirzaei, Fracture Mechanics
Dugdale Approach
An alternative approach for estimation of the plastic-zone size was proposed by Dugdale
and Barenblatt. In this approach it is assumed that the plastic deformation is confined to
a localized strip in front of the crack. The formulation of the model starts by considering
a virtual crack which is larger than the real crack by the amount 2. It is assumed that
the virtual crack is closed by the amount at every tip by the use of compressive stresses
equal to the yield stress.
2a
ys
ys
2a + 2
Fig. 2.36
The next step is to find the stress function required for the solution of this problem by
superimposing two stress functions. The first is for an infinite plate containing a central
crack with the length 2a + 2 under the far-field stress , for which we have:
1 =
z
z2 (a + )
(2-129)
The second stress function is required for the same crack under a distributed load ys over
the distance . This stress function can be obtained by integration of the solution for the
same crack under a point load located at a distance b from the centerline, for which we
have:
( a + ) b2
b =
2
z 2 ( a + ) ( z 2 b2 )
2
2 ys z
for this problem b = a
2 =
a +
(2-130)
( a + ) a2
dz
2
z2 ( a + ) ( z 2 a2 )
2 ys z
2 ys
z
a
1
1 a
2 =
cos
cot
z 2 ( a + )2
z
a+
66
2
z 2 ( a + )
2
2
( a + ) a
M. Mirzaei, Fracture Mechanics
Now we may obtain the required stress function for the Dugdale model by superposition
of the two functions as follows:
3 = 1 2
(2-131)
However, we do not need to go through the complete solution. All we need is to set the
sum of the singular terms of the two functions equal to zero, because we know that in
reality the stresses at the location of the tip of the virtual crack are finite. Accordingly,
the plastic-zone size can be determined as:
z
z2 (a + )
cos
2
ys
2 ys z
z2 (a + )
a
=
a+
K
= I
8 ys
a
cos 1
=0
a+
2 2 a
=
8 ys2
a
(2-132)
which is quite similar to Eq. (2-125), except for a slight difference in the coefficient.
Crack-Tip 3D State of Stress
Both Irwin and Dugdale estimations of the crack-tip-plastic-zone size assume uniaxial
plastic deformation. Nevertheless, the actual state of stress at the crack tip region is
triaxial. In order to see how this 3D state of stress can develop we assume a roll of
material in the interior of the specimen at the crack tip, as depicted in Fig. 2.37.
22
33
11
Plastic Zone
33
22
Elastic
Fig. 2.37
67
M. Mirzaei, Fracture Mechanics
Due to very high stresses in this region, the material undergoes a large extension in the x2
direction and also tends to contract in the x1 and x3 directions to maintain the condition of
constant volume required by plastic deformation (11 + 22 + 33 = 0). However, the
material in this zone is continuously attached to a larger mass of surrounding material,
which is at a low stress and has no tendency to contract. As a result, tensile stresses
develop in other two directions, as shown in Fig. 2.37. Thus, in the interior of the
specimen, the material in the crack tip region experiences a state of plane strain due to
the constraints imposed by the surrounding material. However, at the surfaces of the
specimen there can be no stress in the x3 direction and a state of plane stress exists. Due
to the above arguments, it is clear that a very precise determination of the shape and size
of the plastic zone is not an easy task. Nevertheless, we may go one step further by first
ignoring the stress redistribution due to plastic deformation. Next we may combine our
knowledge of plane strain/plane stress transition, the elastic solution for the crack tip
stresses, and the von Mises yield criterion to obtain a better estimation of the shape and
size of the plastic zone. The von Mises yield condition written in terms of principal
stresses is:
( 1 2 ) + ( 2 3 ) + ( 3 1 )
2
(2-133)
= 2 ys2
Using Eqs. (2-63) we may write the crack-tip principal stresses as:
1
1 + sin( / 2)
KI
cos( / 2)
=
1/ 2
1 sin( / 2)
2 (2 r )
0 plane stress
3 =
( 1 + 2 ) plane strain
(2-134)
Substituting the above stresses into Eq. (2-133) and solving for rp() results in:
1
rp ( ) =
2
1
rp ( ) =
2
KI
ys
K
I
ys
1 3 2
1
+ sin + cos
2
2 2
plane stress
2
3 2
1 2 )
(
1 + cos )
sin +
(
4
(2-135)
plane strain
Fig. 2.38 shows the plastic zone shapes, which are the locus of the above expressions
1
normalized through a division by ry =
2
KI
ys
68
(obtained from Eq. (2-121)).
M. Mirzaei, Fracture Mechanics
|
|
Plane Stress
1.0
|
|
|
Plane Strain
|
|
1.0
Fig. 2.38
Plane Stress/Plane Strain Transition
Fig. 2.39 shows how the plastic zone size gradually decreases from the plane stress size
at the surface to the plane strain size in the interior of the component. This phenomenon
has very important implications for toughness evaluation, i.e., different toughness values
may be measured depending on the dimensions of the specimens.
Plane Strain
Plane Stress
Fig. 2.39
It has long been observed that thicker components have a greater tendency to fracture.
This effect can be attributed to the size of the crack tip plastic zone relative to the
thickness. In thin components, the plastic zone is large compared to the thickness,
whereas in thick components it is very small. In general, fractures of thick specimens are
more brittle in appearance (being flat with no evidence of ductility) while the fractures of
thin specimen often show 45 shear lips over parts of the fracture surface.
69
M. Mirzaei, Fracture Mechanics
toughness
y
1
3
x
x
z
z
Plane Stress
Plane Strain
thickness
Fig. 2.40
Moreover, as depicted in Fig. 2.40, in the case of plane stress the planes of maximum
shear stress are located at angles 45 from the directions of 1 and 3. Although in the
plane strain condition 1 and 2 have the same magnitude as in plane stress, the third
principal stress equals (1 + 2). As the requirement for constant volume dictates =
for plastic deformation, the maximum shear stress will be much lower and occurs on
planes rotated 45 from the directions of 1 and 2.
The effect of Elastic T Stress
We have already shown that the Williams solution for the crack tip stress field in an
isotropic elastic material can be expressed as an infinite power series, whose leading term
exhibits a 1/ r singularity. The third and higher terms in the Williams solution have
positive exponents on r and vanish at the crack tip. However, the second term remains
finite. The two-term expansion is:
T 0 0
KI
fij ( ) + 0 0 0 + L
ij =
2 r
0 0 T
(2-136)
where T is a uniform stress in the x direction, which in turn results in the stress T in the
z direction in plane strain. It has been shown that this second term can affect the plastic
zone shape and the stresses deep inside the plastic zone. The influence of the T stress can
be investigated by constructing a circular model that contains a crack, as depicted below.
70
M. Mirzaei, Fracture Mechanics
On the boundary of this model, we may apply in-plane tractions that correspond to a twoterm expansion of the Williams series. To ensure the validity of the boundary conditions,
the size of the plastic zone which develops at the crack tip must be small relative to the
size of the model. This configuration simulates the near-tip conditions in an arbitrary
geometry and is often referred to as the modified boundary layer analysis.
KI
fij ( ) + T 1i1 j
2 r
ij =
Fig. 2.41
FRACTURE TOUGHNESS TESTING
Fracture toughness tests are carried out to determine the resistance of materials to crack
growth. A variety of specimens have been proposed for fracture toughness testing. The
single-edge-notch bend specimen (SENB) and the compact-tension (C(T)) are the most
common designs and have been standardized by ASTM.
0.6W
C(T)
SENB
a
S=4W
B
W
1.25W
Figure 42
The stress intensity calibration for the SENB specimen is:
KI =
PS
f (a / W )
BW 3/ 2
3( a / W )
1/ 2
f (a / W ) =
(2-137)
{1.99 ( a / W )(1 a / W ) 2.15 3.93 ( a / W ) + 2.7 ( a / W ) }
2
2 1 + 2 ( a / W ) 1 ( a / W )
71
3/ 2
M. Mirzaei, Fracture Mechanics
in which P is the applied load and the dimensional parameters are shown in Fig. 2.42.
For the C(T) specimen the K calibration is:
P
(2-138)
f (a / W )
BW 1/ 2
( 2 + a / W ) 0.886 + 4.64 a / W 13.32 a / W 2 + 14.72 a / W 3 5.6 a / W 4
f (a / W ) =
(
)
(
)
(
)
(
)
3/ 2
(1 a / W )
KI =
At the end of this Chapter, we will show how a simple analytic K-expression can be
derived for the C(T) specimen using an energy approach.
The obtained expression is:
P ( 6.75 a / W + 8.25 )
KI =
3/ 2
BW 1/ 2
(1 a / W )
1/ 2
(2-139)
Fig. 2.43 shows the comparison between the above expressions.
Fig. 2.43
Assignment 5:
Using FRANC2D, obtain a K-calibration for the standard C(T) specimen and compare it
with the above expressions.
72
M. Mirzaei, Fracture Mechanics
Plane Strain Fracture Toughness
The details of the procedure for determining plane strain fracture toughness of materials
are described by the ASTM Standard E 399. As mentioned before, fracture toughness
varies with the specimen thickness. Thus, the specimen should be thick enough to ensure
the minimum toughness corresponding to the plateau shown in Fig. 2.40. The measured
critical SIF is then called the plane-strain fracture toughness for mode I (designated as
KIc) and is a true material property. The specimens should contain the sharpest possible
crack to represent the most severe situation. The usual practice is to machine a notch
with certain geometry and size in the specimen and then produce a fatigue crack in the
root of the notch by cycle-loading the specimen.
It should be noted that the successful usage of the experimentally determined KIc values
in real applications requires that the test materials be identical to those used in real
situations in terms of metallurgy and manufacturing procedure like heat treatment, etc.
The direction of the initiating crack relative to any metallurgical orientation is also
important. The test environment should simulate the real situation particularly with
respect to temperature, loading rate, and corrosive media. The experiments are usually
performed using servo-hydraulic mechanical testing machines equipped with autographic
instrumentation to record load and displacement. Displacement is usually measured
using a clip-gauge which is mounted at the mouth of the machined notch.
If the specimen fails in a linear brittle manner, as shown in Fig. 2.44, the failure load Pcrit
is used to calculate KIc using the appropriate K calibration expression.
Fig. 2.44
In practice, however, the load/displacement behavior shows some degree of non-linearity
as depicted in Fig. 2.45. This effect can be attributed to limited stable crack extension or
the plastic zone growth prior to instability. In this situation, failure is defined as 2%
crack growth, which in normal specimen types would result in a deviation from a linear
trace of about 5%. Thus, the intersection of a line with a 5% smaller slope than the
elastic line with the load-displacement curve is considered as the critical load.
73
M. Mirzaei, Fracture Mechanics
Fig. 2.45
The obtained critical K, designated as KIq, should be further checked to meet a criterion
with regard to size and constraint. The plastic zone size is calculated using the KIq and
compared with the crack length and thickness. If the following criterion is met:
K
a or B 2.5 Iq
ys
(2-140)
then KIq is considered as KIc.
Load-COD Analysis of the C(T) Specimen
In this section we present the derivation and experimental verification of a compliance
expression for the standard C(T) specimen. Accordingly, we will derive a simple and
accurate analytic expression for the stress intensity calibration for the C(T) specimen
using an energy approach. More detailed information about the procedure can be found
in: Mirzaei, M., "Analytic Compliance and Stress Intensity Factor Expressions for C(T)
Specimen," Modarres Technical and Engineering Journal, No. 2, 1996, 44-49.
Based on the theory of elasticity, the analytical solution for such problems starts with the
definition of a stress function, which simultaneously satisfies the equilibrium equations
and the specified boundary conditions. However, the simplifying assumptions required to
find the solution for a finite geometry, such as a C(T) specimen, influences the accuracy
of the final expression. Accordingly, the most accurate expressions found in the literature
have been derived using numerical techniques. The expression proposed by Newman
(also reported in the ASTM proposed recommended practice for R-Curve determination)
derived from a combination of the complex variable method of Muskhelishvili with an
improved boundary-collocation method, is in the original form of:
74
M. Mirzaei, Fracture Mechanics
EBv
2
3
4
= 120.7 1065.3 ( a / W ) + 4098 ( a / W ) 6688 ( a / W ) + 4450.5 ( a / W )
P
(2-141)
where E is the modulus of elasticity, B is the specimen thickness, v is the CMOD (crack
mouth opening displacement), P is the applied load, a is the crack length, and W is the
width of the specimen. The above expression can be solved for either compliance or
stiffness of the specimen and has an accuracy of 0.4 percent within the range of 0.35 <
a/W < 0.6. However, the expression dramatically deviates from experimental data
outside the specified range, particularly at low a/W ratios. Based on the Newman's
results and by the use of Wilson's deep crack analysis, Saxena and Hudak proposed
elastic compliance expressions for a wider range of crack lengths, i.e., 0.2 < a/W <
0.975. They used Newman's results to calculate the location of the axis of rotation of the
crack surfaces at various crack lengths. This, accompanied by an extrapolation technique,
resulted in the initial form of the compliance expression. The obtained expression was
then transformed into a polynomial form using curve fitting to give:
2
EB
0.25 1 + a / W
2
= 1 +
1.61369 + 12.6778 ( a / W ) 14.2311( a / W )
P
a / W 1 a / W
3
4
5
16.6102 ( a / W ) + 35.0499 ( a / W ) 14.4943 ( a / W )
(2-142)
Notwithstanding the above approaches, the elastic deformation of a C(T) specimen can
be quantified through a simple analysis of the deformation components. Fig. 2.46 is a
schematic presentation of one-half of the specimen in both its undeformed and deformed
configurations. Because of its symmetry only half of the specimen is considered.
Fig. 2.46
The analysis starts by assuming that each half of the specimen consists of two major
segments separated by an imaginary boundary, CD. The next assumption is that the line
75
M. Mirzaei, Fracture Mechanics
OO' suffers no deformation so that the vertical displacements of the points O and O' are
identical. According to Fig. 2.46 the application of the load P forces the block AA'CD to
deform in shear and the block DCEF to deform in bending. Thus, the overall vertical
displacement of the point O' can be considered to consist of three different components,
i.e., the vertical displacement of the point B due to the deformation of the block AA'CD,
the vertical displacement of the point C due to the deformation of the block DCEF, and
the rotation induced by the deformation of the block DCEF.
Starting with the first component, for the element of length dx the strain energy due to
shear, Ush , may be written as:
U sh =
2
2G
B dx dy
(2-143)
Here, G is the shear modulus and can be defined as:
QA y
IB
(2-144)
in which, A is the area of the shaded region of the cross section, y is the distance of its
centroid from the neutral axis, Q is the cross-section shear force, and I is the second
moment of area. Substituting for in Eq. (2-143) results in:
2
Bdx H / 2 Q H 2
U sh =
y 2 dy
2G H / 2 2 I 4
(2-145)
where H equals the height of the block AA'CD. The integration results in:
U sh =
BQ 2 H 5
dx
240GI 2
(2-146)
To obtain the total strain energy due to shear ( U sht ) the above expression must be
integrated along the length of the block which is equal to a. In this case Q is considered
to be constant and equal to P so we may write:
U sht =
BP 2 H 5
dx
240GI 2
(2-147)
which upon integration gives:
U sht =
3P 2 a
5HBG
(2-148)
76
M. Mirzaei, Fracture Mechanics
Here, using Castigiliano's second theorem, the vertical displacement of point A' can be
calculated as:
B =
U sht
6 Pa
=
P
5 HBG
(2-149)
For a standard C(T) specimen H is equal to 0.6W. Thus, the above expression can be
written as:
B =
2 Pa
WBG
(2-150)
Based on a similar approach the vertical displacement of point C due to the deformation
of block DCEF can be obtained by integration of the resultant strain along the distance h
and may be written as:
C =
6 Ph ( a + r / 2 )
EBr 2
(2-151)
in which r is the unbroken part or the remainder of the specimen and h is the distance of
the location of M (the applied moment) from the line of symmetry. The above expression
upon substitution of r by (W-a) and h by 0.4W can be rearranged into the following form:
C =
1.2 PW ( a + W )
EB (W a )
(2-152)
The third component of the vertical displacement of the point O' is caused by the rotation
angel . The obtained expression, when rearranged for a standard C(T) specimen, is in
the following form:
R =
1.5P ( a + W )( a + 1.5W )
EB (W a )
(2-153)
The total vertical displacement of the point O' is the sum of the three individual
components and can be written as:
T =
P 1.5 ( a + W )( a + 2.3W ) 2a
+
2
B
WG
E (W a )
(2-154)
The above expression was derived for half of the specimen. In practice, the CMOD for
the whole specimen (v) is two times T . In order to simplify the obtained expression, G
77
M. Mirzaei, Fracture Mechanics
can be substituted by E/2(1 +). Accordingly, the final expression for compliance can be
written as:
EBv 3 ( a + W )( a + 2.3W ) 8a (1 + )
=
+
2
P
W
(W a )
(2-155)
which can be rearranged in terms of the a/W ratio to give:
EBv 3 ( a / W + 1)( a / W + 2.3)
=
+ 8a (1 + )( a / W )
2
P
( a / W 1)
(2-156)
Fig. 2.47 is a comparison between Eq.(2-156) and Eq.(2-141) proposed by Newman, and
Eq.(2-142) proposed by Saxena and Hudak. In order to present the entire a/W range, a
logarithmic scale is used for the normalized compliance. It is evident that there is an
excellent agreement between the three expressions within the middle range of a/W.
Above a/W = 0.6 and below a/W = 0.35 Newman's expression deviates from the other
two equations.
Fig. 2.47
As shown before, the stress intensity factor can be related to compliance through the
following expression:
K 2 = EG
EP 2 C
2 B a
(2-157)
78
M. Mirzaei, Fracture Mechanics
in which G is the energy release rate and C is the compliance. In this equation, however,
compliance should be defined for the point of application of load. For this purpose
Eq.(2-156) can be modified for the load line to give:
3 ( a / W + 1)( a / W + 1.5 )
EBv LL
= EBC =
2
P
( a / W 1)
(2-158)
In the above vLL is the displacement at the load line. Finally, the required expression for
K can be obtained from Eqs (2-157) and (2-158) as:
P ( 6.75 a / W + 8.25 )
KI =
3/ 2
BW 1/ 2
(1 a / W )
1/ 2
(2-159)
Plane Stress Fracture Toughness
Design based on KIc can be considered quite conservative for relatively thin sections in
the structures because materials usually show much higher fracture toughness in the state
of plane stress (see Fig. 2.40). In our previous discussion on K-G relationship we showed
that:
K2
G = (1 2 ) I , plane strain
E
2
K
G = I , plane stress
E
Hence, the critical stress intensity factor (Kc) can be used to calculate the critical energy
release rate (R) and vice versa. Also in our previous discussions on energy approach we
saw that some materials, particularly in the state of plane stress, exhibit a rising R curve.
R
Kc2/E
a0
Fig. 2.48
79
M. Mirzaei, Fracture Mechanics
In these situations, it is possible to define the critical stress intensity at the point where G
is tangent to the R curve, as depicted in Fig. 2.48 (Note that in general G can be a nonlinear function). However, this instability point does not represent a material property,
because it depends on the shape of the R curve, which in turn, is governed by the
geometry of the cracked body. Thus the usage of such Kc values in design should be
carried out with some precaution, regarding the similitude between the size and geometry
of laboratory specimens and real components. For instance, the thickness of the
laboratory specimen is normally fixed to match the thickness of the real component.
One problem with thin sheet fracture toughness testing is that the specimens are subject
to out-of-plane buckling. Consequently, an anti-buckling device should be fitted to the
specimen, which makes the test more difficult. The ASTM Standard E 561 describes
alternative methods for computing both the stress intensity and the crack extension in an
R curve test. In general, as the crack grows the load-displacement curve deviates from its
initial linear shape because of the continuous change in compliance. The test can be
carried out under displacement-control condition to ensure stable crack growth.
Instantaneous crack length can be obtained by partial unloading, measuring the
compliance (see Fig. 2.49), and using the compliance expressions like Eqs. (2-142) and
(2-156).
Load
Partial unloadings
1/C
Displacement
Fig. 2.49
The instantaneous stress intensity is related to the current values of load and crack length.
Usually, the stress intensity should be corrected for plasticity effects by determining an
effective crack length. Some authors use 1 as the subscript to designate the planestress fracture-toughness for mode I as K1c.
80
M. Mirzaei, Fracture Mechanics
Chapter 3
Elasto-Plastic Fracture Mechanics (EPFM)
As previously discussed in Chapter 2, due to finite strength of materials, there is always a
small damaged zone around the crack tip. For metals, this damaged zone is referred to as
the crack tip plastic zone. If the size of the plastic zone is small enough that it can be
contained within the K-dominant region, we may use K and G as the LEFM parameters.
This condition is also referred to as the small-scale-yielding condition (SSY). On the
other hand, if this zone is larger than the K-dominant region, then our linear elastic
assumptions are not correct, i.e., LEFM is not applicable and nonlinear models must be
used. Fig. 3.1 shows three different situations regarding the spread of crack tip plastic
zone. The first one represents the SSY condition. The second one shows the situation
when the crack tip plastic zone is large enough to cause some nonlinearity in the overall
response of the component. However, if this nonlinearity is not very significant, it can be
handled with a non-linear elastic model, for which we will introduce a non-linear-elastic
energy release rate called J (usually known as the J-Integral). However, we should note
that, similar to the LEFM, there is a limit to the validity of J with regard to the size of the
plastic zone compared to the J-dominant region.
Fig. 3.1: From left, a) Linear Elastic, b) Elastic-Plastic, c) Fully Plastic, d) Overall
Plasticity.
For situations where the crack tip plasticity is so wide-spread that even plastic ligaments
may form within the component (Fig. 3.1c) we will show that the appropriate parameter
would be the crack-tip opening displacement (CTOD). Finally, when the loading causes
overall plastic deformation even in presence of cracks (Fig. 3.1d), the failure mode is
plastic collapse not fracture.
81
M. Mirzaei, Fracture Mechanics
J-Integral
The J contour integral is extensively used in fracture mechanics as an energy-based
criterion for determining the onset of crack growth. However, it can also be used as a
stress based criterion. Referring to Fig. 3.2, the original form of the J- Integral for a line
contour surrounding the crack tip can be written as:
J = wdy Ti i ds
x
(3-1)
in which, w = ij d ij is the strain energy density (ij and ij as stress and strain tensors),
Ti=ijnj are the components of the traction vector which acts on the contour, u i are the
displacement components, and ds is a length increment along the contour .
M
y
Ti
T
P
Fig. 3.2: An arbitrary contour around the crack tip
At first the above integral might look unfamiliar and rather strange. However, it should
be noted that the J- Integral is nothing but a non-linear energy release rate defined by:
d
dA
(3-2)
= U V
(3-3)
J =
where,
82
M. Mirzaei, Fracture Mechanics
in which is the total potential energy, U is the strain energy, and V is the external work.
Fixed Displacement Condition
Similar to the LEFM analyses, suppose that we have stretched a cracked component by
the amount and fixed it as depicted in Fig. 3.3. The amount of elastic strain energy
stored in the component is equal to the ABD area and the slope of the load-displacement
curve at any instant represents the stiffness of the component. Let us initially assume that
the stored energy is sufficient to maintain an incremental crack growth (da) under the
fixed displacement condition. Since the component with a longer crack has a lower
stiffness, the stored elastic energy decreases to a new level equal to the ACD area. Since
there is no externally applied load in the system, the total potential energy is equal to the
strain energy, the only source to provide the required energy for the crack growth. Hence,
we may write:
dU
J =
da
(3-4)
P
B
-dP
a
a
a+da
Fig. 3.3
Constant Load Condition
In this case, the amount of the elastic strain energy initially stored in the component is
considered equal to the ABE area. We also assume that the potential energy is sufficient
to maintain an incremental crack growth (da) under the constant load condition.
83
M. Mirzaei, Fracture Mechanics
P
B
F
a
a+da
P
A
Fig. 3.4
The slope of the load-displacement curve at any instant represents the stiffness of the
component. The component with a longer crack has a lower stiffness but the stored
elastic energy increases to a new level equal to the ACD area. The reason is that an
excess amount of energy provided by moving the constant load P through the distance
d, equal to rectangle BCDE, has now been added to the system. Hence, we may write:
= U P = U *
(3-5)
U = dP
*
where U* is the complementary strain energy. Thus, we have:
dU *
J =
da P
(3-6)
In general, we may write for both cases:
P
P
J = dP =
dP
a
a
P
0
P 0
(3-7)
P
J = Pd =
d
a
0
a 0
Now the question is: how the original J-Integral expression can represent the energy
release rate? To find the answer, we start with the general definition of J (written for the
constant thickness condition) as follows:
84
M. Mirzaei, Fracture Mechanics
J =
d
da
(3-8)
Referring to Fig. 3.2, we may write the total potential energy as:
= wdA Ti ui ds
(3-9)
in which A is the area surrounded by the contour . Differentiation with respect to the
crack length gives:
du
d
dw
=
dA Ti i ds
da A da
da
(3-10)
Note that x / a = 1 , so we may write:
d
=
+
=
da a x a a x
(3-11)
Using Eq. (3-11) we can write Eq. (3-10) as:
d
ui ui
w w
=
dA Ti
ds
da A a x
a x
(3-12)
Now, we investigate the first term of the first integral of Eq. (3-12). Recalling the
general definitions for the constitutive equation for an ELASTIC material and the linear
strain tensor and noting that ij = ji we can write:
ij =
w
ij
, ij =
1
( ui, j + u j ,i ) , ij = ji
2
u
w w ij 1
=
= ij i
2 a x
a ij a
j
ui
= 1 ij
2 a x
j
ui
= ij
x j a
u j
+
a xi
ui
+ ji
a
x
(3-13)
(i )
Note that in the last term of Eq. (3-13i) we interchanged the dummy indices. Integrating
the above over A, changing the area integral to line integral, and noting that ij , j = 0 , we
have:
85
M. Mirzaei, Fracture Mechanics
w
a dA =
A
ij
ui
x j a
ui
dA = ij
n j ds
stress boundary condition, Ti = ij n j
(3-14)
ui
w
ds
dA = Ti
a
a
A
Hence, using Eq. (3-14), we may write Eq. (3-12) as:
u
d
w
= Ti i ds dA
da x
x
A
(3-15)
Now we change the surface Integral into a line Integral and combine the two terms to
give:
u
d
= wnx Ti i ds
da
x
(3-16)
Note that nx ds = dy , so we may write:
u
J = wdy Ti i ds
x
(3-17)
which is the original form of the J-Integral.
Characteristics of the J-Integral
In this section we will explore some interesting characteristics of the J-Integral. For
instance we will show that the J-integral is zero over a closed path and, as a result, it
remains independent of the path considered for its evaluation around the crack tip.
Referring to Fig. 3.5, and using Eqs. (3-17) and (3-14), we may define the J-Integral as
an area Integral:
J=
w ui
x x j ij x
A*
dA
(3-18)
86
M. Mirzaei, Fracture Mechanics
*
A*
Fig. 3.5
For the first term in the above brackets we may write:
w w ij
=
= ij ij
x ij x
x
(3-19)
which in a fashion similar to what was done in Eqs. (3-13) can be written in terms of
displacements to give:
u
w 1
= ij i
2
x
x x j
= ij
x j
u j
+
x xi
(3-20)
ui
Invoking the equilibrium condition, we have:
x j
ui ui ij
ui
ij
= ij
x
x j x x x j
equilibrium
x j
ij
x j
(3-21)
=0
ui
ui
ij
= ij
x
x j x
which means that the second term in the brackets of Eq. (3-18) is identical to Eq. (3-20).
Hence, we conclude that the J-Integral is zero for a closed path. Now, if we consider a
closed path like the one shown in Fig. 3.6, we may write:
87
M. Mirzaei, Fracture Mechanics
2
4
Fig. 3.6
J = J1 + J 2 + J 3 + J 4 = 0
(3-22)
As the crack surfaces are traction free and perpendicular to the y axis, we may write:
Ti = dy = 0 J 3 = J 4 = 0 J1 = J 2
(3-23)
which shows that J is path-independent.
Assignment 6: Evaluate the J-Integral along a circular path and show that for a linear
elastic material we have J =
K I2
.
E
J as a stress intensity parameter
Another interesting characteristic of the J-Integral is that it can also represent the stress
and strain fields near the crack tip.
For an elastic-plastic material, the Ramberg-Osgood equation can be written as:
=
+
0 0
0
(3-24)
88
M. Mirzaei, Fracture Mechanics
in which 0 and 0 are the yield stress and yield strain respectively, and n is the strain
hardening coefficient. Accordingly, it can be shown that the distribution of the stress and
strain tensors at the crack tip region can generally be written as:
1
J n +1
ij = k1
r
J
ij = k2
r
(3-25)
n
n +1
For a linear elastic material n = 1. The following relations, known as HRR singularities
(due to Hutchinson, Rice, and Rosengren) show that J can in fact represent the strength of
the stress and strain distributions around the crack tip.
1
EJ n +1
ij = 0 2 % ij (n, )
0 I n r
(3-26)
EJ n +1
ij = 0 2 %ij (n, )
E 0 I n r
in which, In is an integration constant that depends on n, and % ij (n, ) and %ij (n, ) are
geometric expressions.
Numerical Determination of the J-Integral
For most practical problems there is no analytical solution for the J-integral. The
numerical determination of the J-Integral using the finite element method is relatively
straightforward. Consider an inclined crack lying along the -axis as shown in Fig. 3.7.
We may write the J-Integral as:
J = wd T
u
ds
(3-27)
or alternatively as:
89
M. Mirzaei, Fracture Mechanics
n,un
n ,vn
i+1
dy
ds
i
dx
X
Fig. 3.7
un
ds
J = wd ( n , n )
vn
(3-28)
where we have:
2
1
1 + 2 2
xx + yy + zz ) +
(
( xy xx yy yy zz xx zz )
2E
E
n = xx cos 2 + yy sin 2 + xy sin cos
w=
n = ( yy xx ) sin cos + xy ( cos sin )
2
(3-29)
un = u cos + v sin
vn = u sin + v cos
Accordingly, the J-Integral can be calculated by evaluation of the values of the following
expression between adjacent nodes and computing the total sum around the contour.
J = w ( sin dx + cos dy ) [ xx xx cos dy
+ xy yy sin dy xy xx cos dx yy yy sin dx
+ xy xy cos dy xy xy sin dx + ( xx sin xy cos )du
( yy cos + xy sin )dv]
90
(3-30)
M. Mirzaei, Fracture Mechanics
THE ENERGY DOMAIN INTEGRAL
The formulation of the energy domain integral, proposed by Shih et.al, provides a general
framework for numerical analysis of the J-Integral. This approach is quite general and
can be applied to quasistatic and dynamic problems with elastic, plastic, or viscoplastic
material response, as well as thermal loading. Moran and Shih applied a general balance
law to derive a variety of contour integrals, including the energy release rate. We start
the formulation by taking the inner product of the equation of motion with displacement
rate and rearranging terms to give:
ji , j = u&&i
ji , j u&i = u&&i u&i
(3-31)
( ji u&i ) = u&&i u&i + ji u&i , j T& + w&
,j
where T and w are the kinetic energy and stress work densities, respectively. Integrating
this relationship over an arbitrary volume and applying the divergence and transport
theorems gives:
( u& ) , d V = ( w& + T& )d V
ji i
= Vj
dt t
x j
( ji u&i ) , j d V = ( w + T )d V V j ( w + T ), j d V
t V
V
V
ji u&i m j dS =
V
(3-32)
( w + T )d V ( w + T )V j m j dS
t V
V
where V represents volume, mj is the outward normal to the surface V , and Vj is the
instantaneous velocity of V (it is in fact the crack speed, or dx/dt). Fig. 3.8 shows the
special case of a crack in a two-dimensional body. The crack growth is considered along
the x axis and the origin is attached to the crack tip. It is assumed that the contour C0,
which contains the propagating crack and bounds the area A, is fixed in space. There is
also a small contour ( ) that surrounds the crack tip. We assume that is fixed in size
and moves with the crack tip. For this case, the balance law in Eq. (3-32) becomes:
C0
u& m j dC =
ji i
( w + T )dA ( w + T )V 1 j + jiu&i m j d
t A
(3-33)
where V is the crack speed in the x direction. The integral on the left side of Eq. (3-33) is
the rate at which energy enters into the region surrounded by C0.
91
M. Mirzaei, Fracture Mechanics
mj
C0
-nj
A
Fig. 3.8
The first term on the right side of (3-33) is the rate of increase in internal energy of this
region. Finally, the second integral on the right side represents the rate at which energy is
transferred from this region through to the crack tip. Note that on we have nj = - mj
and the following expression for the energy flux into can be inferred from Eq. (3-33):
F () = ( w + T ) V 1 j + ji u&i n j d
(3-34)
If is considered to be a vanishingly small contour, its shape would not affect the flux.
Hence, the energy flux to the crack tip can be obtained by:
F = lim ( w + T ) V 1 j + ji u&i n j d
0
(3-35)
The crack extension for an increment of time dt is da = Vdt, for which the expended
energy is F dt. Accordingly, the energy release rate is:
J=
(3-36)
Fdt F
Vdt V
which upon substitution for F from Eq. (3-33) results in a general expression for the J
integral. On the other hand the displacement rate can be written as:
u&i =
ui
u
V i
t
x
(3-37)
The first term in Eq. (3-37) vanishes under steady state conditions. Moreover,
displacements close to the crack tip change rapidly with position. Hence, in all cases, the
92
M. Mirzaei, Fracture Mechanics
second term in Eq. (3-37) can be considered as the dominant term and the J- Integral can
be written as follows:
u
J = lim ( w + T ) 1 j ji i n j d
0
x
or
(3-38)
J = lim ( w + T ) 1i ij j ni d
0
x
Eq. (3-38) was derived from a generalized energy balance so it can be applied to elastic,
plastic, viscoplastic, and viscoelastic material behaviors. For instance, if we consider an
elastic-plastic material loaded under quasistatic condition, the total strain including
thermal strains, would be:
ij = ije + ijp + ij = ijm + kkt
(3-39)
where is the coefficient of thermal expansion and is the temperature difference
relative to a reference temperature. The superscripts e, p, m, and t denote elastic, plastic,
mechanical, and thermal strains, respectively. The mechanical strain is equal to the sum
of elastic and plastic components and the stress work is:
klm
w = ij d ijm
0
However, it should be noted that Eq. (3-38) is not in general path-independent, except in
a local region near the crack tip.
FEM Implementation (2D problems)
The evaluation of Eq. (3-38) using FEM is rather difficult due to the vanishingly small
size of the contour . It would be more convenient to change the contour integral into an
area integral. We start by constructing a closed contour by connecting the inner and outer
contours, as depicted in Fig. 3.9.
The outer contour 1 is finite while o is vanishingly small. For a linear or nonlinear
elastic material under quasistatic conditions Eq. (3-38) can be written in terms of the
following integral. The closed contour is: * = 1 + + + o .
J=
u j
u j
w
qm
d
qd
ij
1
i
i
2
j
x1
x1
*
+ +
93
(3-40)
M. Mirzaei, Fracture Mechanics
where q is an arbitrary but smooth function that is equal to unity on o and zero on 1.
Note that mi = - ni on o, m1 = 0 and m2 = 1 on + and - portions of the closed
contour.
x2
+
x1
ni
mi
A*
mi
Fig. 3.9
If the crack faces are assumed traction-free (which is generally the case) the second
integral in Eq. (3-40) vanishes. Moreover, we may apply the divergence theorem to Eq.
(3-40) to obtain:
J=
J=
u j
w
q dA
ij
i
1
A* xi x1
(3-41)
u j w
u j
q
w
dA
ij
i
1
x1
xi ij x1 x1 qdA
xi
A*
A*
where A* is the area enclosed by * . Referring to Eqns (3-19) to (3-21), we see that in
the absence of body forces and when w exhibits the properties of an elastic potential
such that:
ij =
w
ij
(3-42)
we may write:
(3-43)
u j w
=0
ij
xi
x x1
94
M. Mirzaei, Fracture Mechanics
Hence, the second integral of Eq. (3-41) is zero. We may further divide w into elastic and
plastic components:
kle
w = w + w = ij d +
e
e
ij
klp
S d
ij
p
ij
(3-44)
where Sij is the deviatoric stress. The elastic components of w and ij satisfy Eq. (3-42).
In general, however, plastic deformation does not exhibit the properties of a potential so
that Eq. (3-43) may be approximately valid for plastic deformation when there is no
unloading. Moreover, thermal strains would cause the left side of Eq. (3-43) to be
nonzero. Thus, the second integrand in Eq. (3-41) vanishes in limited circumstances, but
not in general. For a linear or nonlinear elastic material under quasistatic conditions, in
the absence of body forces, thermal strains, and crack face tractions, Eq. (3-41) reduces
to:
J=
u j
q
dA
ij
1
i
x1
xi
A*
(3-45)
Eq. (3-45) is equivalent to Rice's path-independent J-Integral. If we compare Eq. (3.45)
with Eq. (2.120) provided by deLorenzi (Chapter 2), we see that the two expressions are
identical if q = x1/a .
In the FEM analysis of Eq. (3-45) the inner contour o is often taken as the crack tip, and
A* naturally corresponds to the area inside 1. The boundary of 1 should coincide with
element boundaries. The q function must be specified at all nodes within the area or
volume of integration. The shape of the q function is arbitrary, as long as q has the
correct values on the domain boundaries. In a plane stress or plane strain problem, for
example, q = 1 at o, (which is usually the crack tip) and q = 0 at the outer boundary. The
value of q within an element can be interpolated as follows:
n
q ( xi ) = N I qI
(3-46)
I =1
where n is the number of nodes per element, qI are the nodal values of q, and NI are
elemental shape functions. The spatial derivatives of q are given by:
n
q
=
xi I =1
2 or 3
N I k
qI
k x j
k =1
(3-47)
where k are the parametric coordinates for the elements. In the absence of thermal
strains, path-dependent plastic strains, and body forces within the integration area, the
discretized form of the domain integral is as follows:
95
M. Mirzaei, Fracture Mechanics
nG
x j
q
u
J = ij j w1i
det
x1
A* n =1
xi
k
wn
n
(3-48)
in which nG is the number of Gaussian points per element, and wn is a weighting factor.
Some Considerations on the path-independence of the J-Integral
The original form of the J-Integral, as expressed in the form of Eq. (3-38), shows
significant path-dependence when evaluated in residual stress fields. Residual stresses are
self-equilibrating stresses which may arise from different manufacturing processes,
including welding. Here we will briefly discuss a modified form of the J-Integral that
accounts for the effects of residual stresses and verify its path independency. More details
are reported in: Mirzaei, M., Seifi, R., "Finite Element Evaluation of the J-Integral in
Residual Stress Fields, Proceedings of the10th International Conference on Pressure
Vessel Technology, July 7-10, 2003, Vienna, Austria.
Eq. (3-38) can be modified to account for the residual stresses by adding an area integral,
which includes initial strains. The modified form can be written as:
u j
ijo
ni ds + ij
J = w 1i ij
dA
x1
x1
(3-49)
in which ijo represents the residual strain. The first term can be converted in to an area
integral to give:
u j
ijo
q
J = ij
+ ij
w 1i
x1
x1
xi
A
q dA
(3-50)
where q is an arbitrary weighting function, which is equal to zero on and unity at the
crack tip. The finite element form of the modified integral can be written as:
nG
ijo
q
u j
J = ij
w1i
+ ij
x1
x1
A* n =1
xi
x j
q det
k
wn
n
(3-51)
Fig. 3.10 shows the finite element model of an internal circumferential crack in a cylinder
using axisymmetric elements. The analyses were carried out using the eight-node
isoparametic elements formulated in the ABAQUS software. A computer program was
developed to calculate the J values based on the modified expression and the output data
files of the finite element analyses.
96
M. Mirzaei, Fracture Mechanics
Fig. 3.10: Finite element model of an internal crack using axisymmetric elements.
Fig. 3.11a shows the assumed distribution of the residual stresses, which may arise from
typical girth welding of pressure vessels and pips. Fig. 3.11b shows the variation of both
original and modified J-Integrals with the distance from the crack tip. The J values are
normalized with respect to Jo = ooa , and the distance from the crack tip (R) is
normalized with respect to the crack length (a). The obtained results clearly show that the
modified expression ensures the path independency of the J-Integral in different
combinations of residual stresses plus internal pressures.
Fig. 3.11: a) A typical distribution of residual stresses due to girth welding of pipes. b)
Variation of normalized J with the distance from the crack tip for an internal circumferential
crack (solid lines show the modified J-Integral, dashed lines show the original J-Integral).
97
M. Mirzaei, Fracture Mechanics
FEM Implementation (3D problems)
For three-dimensional problems we must convert Eq. (3-35) into a volume integral. A
typical planar crack in a three-dimensional body is shown in Fig. 3.12. The aim is to
evaluate J at a particular on the crack front. First we construct a tube of length L and
radius r0 that surrounds a segment of the crack front, as shown in Fig. 3.12. Assuming
quasistatic conditions, we can define a weighted average J over the crack front segment
L as follows:
J L =
J ( ) qd
(3-52)
= lim w1i ij j qni dS
r0 0
x1
S0
where the J-Integral at has been defined by Eq. (3-38).
Fig. 3.12
Using a procedure similar to the two-dimensional formulation (see Eq. (3-40)), we may
construct a second tube of radius r1 around the crack front and define the weighted
average J in terms of a closed surface:
u j
u j
J L = ij
w1i qmi dS 2 j
qdS
x
+
1
1
S*
S +S
which upon changing the surface integral into a volume integral results in:
98
(3-53)
M. Mirzaei, Fracture Mechanics
J L =
u j
V*
ij
u j
q
w1i
dV 2 j
qdS
x1
x1
xi
S+ +S
(3-54)
Note that in derivation of the above expression we ignored various sources of energy to
simplify the procedure. However, we may consider the effects due to plastic
deformation, thermal loading, and body forces by adding appropriate energy terms to the
relevant integral and develop the following more general expression:
p
u j
u j
q ij w p
+
V * ij x1 1i xi ij x1 x1 + ii x1 Fi x1 dV
u j
qdS
2 j
x
1
S +S
J L =
(3-55)
If we choose L short enough so that the changes in the point-wise value of the JIntegral can be ignored, we may write:
J ( )
J L
(3-56)
q ( , r ) d
0
Finally, the discretized form of the domain integral for FEM implementation can be
derived in a fashion similar to what we did for the 2D formulation. In the absence of
thermal strains, path-dependent plastic strains, and body forces within the integration
area, we have:
nG
x j
q
u
J = ij j w1i
det
x1
V * n =1
xi
k
wn
n
(3-57)
in which nG is the number of Gaussian points per element, and wn is a weighting factor.
In practice, the above formulations have been incorporated into a research code, named
WARP3D. This code has been developed in the University of Illinois at UrbanaChampaign, Department of Civil Engineering, for 3D nonlinear finite element analysis of
solid models subjected to static and dynamic loads. Among other things, the code has a
robust finite strain formulation, and a general J-Integral computation facility (with
inertia, crack face loading, thermal loading, functionally graded and anisotropic material
models). The code, along with its documentation and a number of case studies, can be
accessed at: http://cern49.ce.uiuc.edu/cfm/warp3d.html
99
M. Mirzaei, Fracture Mechanics
JIC measurement
In order to measure the critical J, as a material property for the onset of crack growth, we
need a specimen for which the J-calibration expression is available. Consider the SENB
specimen depicted in Fig. 3.13 for which we have:
J=
2A
B (W a)
(3-58)
S=4W
Fig. 3.13
For this particular geometry, it can be shown that A is the area under the loaddisplacement curve. Other parameters are introduced in Fig. 3.13. The crack length at
every instant can be obtained by partial unloading and measuring the compliance, as
depicted in Fig. 3.14.
Accordingly, J can be calculated for every increment of crack growth, a = a a0.
Load
Partial unloadings
1/C
Load-Line Displacement
Fig. 3.14
Finally, JQ can be obtained from diagrams like the one shown in Fig. 3.15, and if the
following thickness criterion is met, JQ is considered as JIC.
100
M. Mirzaei, Fracture Mechanics
B, b0
25 J Q
(3-59)
ys
in which b0 is the unbroken or the remainder part of the specimen. Note that in this
diagram the role of the line with the slope 2 ys is to account for the apparent increase in
J-Integral
the crack length because of crack tip blunting prior to growth. The amount of crack
length correction can be considered to be half the CTOD, as depicted in Fig. 3.16.
0.15 mm
exclusion line
1.5 mm
exclusion line
2ys
JQ
2ys
Crack Extension
Fig. 3.15
Using the relationship between K, J, and CTOD, we may write:
K I2
J
t =
=
E ys ys
(3-60)
J = ys t = 2 ys ( a )
a
CTODc
Fig. 3.16
101
M. Mirzaei, Fracture Mechanics
CTOD Approach
Wells (1960) proposed that the amount of crack tip opening displacement prior to crack
growth can be considered as a measure for the material fracture toughness, or the
tendency for the crack to grow (see Fig. 3.17).
CTODc
Fig. 3.17
It is clear that CTOD, obtained from a linear elastic analysis, is zero.
2
a2 x2
E
4
=
a2 x2
E
v=
(3-61)
x =a
=0
However, if we introduce the effects of crack tip plasticity, we have:
aeff = a + ry t =
4
E
a 2 + 2ary + ry 2 a 2
4
2ary
E
4 K I2
CTOD t =
E ys
ry 0 t =
(3-62)
The above expression was derived using the Irwins model. Using the Dugdale model,
we first write the crack opening displacement in terms of the stress function .
Ev = 2 m y (1 + ) e
(3-63)
102
M. Mirzaei, Fracture Mechanics
which for y = 0 is:
v=
2 m
E
(3-64)
Next, we use the non-singular term of Eq. (2-130) to write:
a
=
cot
z
2 ys
2
z 2 ( a + )
2
( a + ) a 2
(3-65)
Accordingly the crack-tip-opening displacement can be calculated as:
for z a, CTOD t 2vt =
8 ys a 1
t =
E 2 2 ys
K I2
E ys
a
ln Sec
2
E
ys
8 ys a
(3-66)
+ L
(Dugdale Model)
Eqs. (3-62) and (3-66) both show that a critical SIF corresponds to a critical CTOD.
Hence, at least in the realm of LEFM, the three fracture criteria, G, K, and CTOD are
consistent with each other. However, the major advantage of the CTOD is that the
concept of crack tip plasticity is naturally incorporated in its definition, and this makes it
a unique candidate for fracture criterion in problems with significant crack tip plastic
deformation. On the other hand, the major disadvantage of this criterion is that
formulations like Eq. (3-66) are not available for practical geometries. To overcome this
problem, a group of researchers attempted to relate the CTOD to local strains at certain
locations adjacent to the crack, arguing that critical CTOD corresponds to critical strain at
these points (see Fig. 3.18).
P
y
y
a
P
Fig. 3.18
103
M. Mirzaei, Fracture Mechanics
The procedure began by converting the CTOD to the following dimensionless parameter:
t E
t
=
2 ys a 2 ys a
(3-67)
Next, a rather complicated analytical strain analysis was carried out for the center cracked
panel. The analysis result showed:
2
2
a
a
+
y 2 2a
a+ y
1 y
coth
=
2
ys y
a
a
1
a+
2
2
a + a
a+ y
+ (1 ) cot 1
2
a
a+
1
+ cos
a +
(3-68)
in which is the Dugdale plastic zone size. The conclusion was that y / ys depends on
a / y . Accordingly, analytical COD design curves were produced which contained
variation of with y / ys for different a / y ratios. However, in practice, the
experimental results did not follow the analytical curves and showed no such dependency
for y / ys > 0.5 . Hence, the analytical conclusion was ignored and the experimental
path was followed to obtain:
y
ys
for y / ys < 0.5
y
0.25 =
ys
(3-69)
for y / ys > 0.5
The final stage in the development of a practical fracture criterion was to assume:
for a / W < 0.1,
y
E
=
ys E ys ys
(3-70)
which upon substitution into Eq. (3-69) gave:
104
M. Mirzaei, Fracture Mechanics
ys
E
for / ys < 0.5
= t
2 ys a
for / ys > 0.5
0.25 = t
ys
2 ys a
(3-71)
The above expressions relate the far-field stress to the crack length and CTOD. Thus
they are in a proper form for design purposes. For instance, knowing the critical CTOD
as the material property, the critical crack size under the far-field stress 1 can be
calculated as:
ac =
ac =
t c E ys
for 1 / ys < 0.5
2 12
t c E
2 ( 1 0.25 ys )
(3-72)
for 1 > 1 / ys > 0.5
in which t c is the critical CTOD. In practice, 1 can be considered to be the resultant of
various global and local stresses.
Experimental Determination of critical CTOD
Consider the SENB specimen depicted in Fig. 3.19. The specimen is pre-cracked and
loaded as shown. Duo the overall plastic deformation ahead of the crack tip, the ligament
behaves like a plastic hinge and the two segments of the specimen rotate about a rotation
point.
P
W
r(W-a)
tc
CMODc
Fig. 3.19
105
M. Mirzaei, Fracture Mechanics
The CMOD at any instant can be measured using a clip gage and the CTOD can be
obtained using the following expression:
t
CMOD
r (W a )
r (W a ) + a
(3-73)
For this geometry r is usually considered as 0.4. The amount of CTOD at the onset of
crack growth ( t c ) gives the required material property.
CTOA Approach
Both CTOD (Crack Tip Opening Displacement) and CTOA (Crack Tip opening Angle)
can be used for determination of the onset of crack growth in ductile fracture problems.
However, for problems which involve both initiation and growth phases, it has been
shown that modeling approaches based on CTOA can provide a viable growth criterion
for thin materials. Using the finite element method, the CTOA is defined by nodal
displacements normal to the crack plane. For 2D planar problems as shown in Fig. 3.20,
the CTOA can simply be considered as the angle defined by the first nodal displacement,
one element back from the crack tip, or at a characteristic length Lc. Note that the CTOA
is usually considered as the full angle from one crack face to the other, not the half-angle
to the crack mid-plane.
Fig. 3.20
The CTOA-controlled crack growth operates by advancing the crack front a prescribed
distance when the CTOA reaches a specified critical value. Crack extensions occur
through a node release procedure, where nodes initially confined to a symmetry plane are
released, extending the crack typically by an element size. In WARP3D this procedure is
carried out by releasing the constraints applied to nodes on the crack front after a userspecified level of CTOA is reached, thereby new traction-free crack surfaces are created.
Critical Value of CTOA
As described above, crack growth occurs when the crack tip opening angle reaches a
critical value. The critical CTOA is calculated from the critical CTOD, which is a
106
M. Mirzaei, Fracture Mechanics
measure of fracture toughness. Fracture toughness for a specific material can vary with
the thickness, strain rate, temperature, etc. The general methodology for using a
calibrated value of critical CTOA for an arbitrary component made of a specific material
can be summarized as: (a) obtain well characterized experimental fracture test data with
crack tearing up to and beyond maximum load; (b) analyze the tests with elasticplastic
CTOA controlled crack-tearing finite element analysis with crack front modeling, mesh
size, and material model of sufficient fidelity to represent the tests; (c) iterate the FEA
with an assumed CTOA value until the results are close to the experimental data in
predicting deformation, strains, maximum load and also are reasonably close in
predicting the trends and amount of crack growth; (d) use this calibrated CTOA value,
material data, and mesh size to predict crack tearing fracture behavior for other types of
specimens or applications.
Example
This section briefly presents the results of the growth simulation of a preexisting crack in
a thin cylindrical tube subjected to internal gaseous detonation using the finite element
method and the CTOA approach. More details are reported in: Mirzaei, M., Karimi,
R., "Crack growth analysis for a cylindrical shell under dynamic loading," Proceedings
of the ASME PVP-2006 /11th International Conference on Pressure Vessel technology,
ICPVT-11, 23-27 July 2006, Vancouver, Canada.
The analysis was carried out using WARP3D and the crack tip opening angle (CTOA)
was used as the fracture parameter. The critical CTOA was inferred directly from the
experimental results. Fig. 3.21 depicts a comparison between the numerical crack growth
simulations and the experimental results reported by Chao and Shepherd.
Fig. 3.21
107
M. Mirzaei, Fracture Mechanics
Crack growth simulation using cohesive elements
In fracture mechanics simulations of ductile crack growth there are instances that a
single-parameter treatment of cracked bodies may not yield accurate results in presence
of widespread yielding. The remedy is to use either two-parameter fracture mechanics
methods (like the J-Q approach), or other solutions based on damage mechanics models.
Among the latter, the cohesive model with interface elements seems very attractive
because it is computationally efficient and its two parameters can be determined with
relative ease. In this approach, the crack extension evolves as a direct outcome of the
computations by creation of new traction free crack faces. This method has been
formulated in WARP3D to provide it with the capability to simulate mixed mode crack
growth, and also phenomena such as crack turning and branching. In general, the
interface elements consist of two surfaces which connect the faces of two adjacent solid
elements. The crack propagation occurs when the energy release rate reaches a critical
value. The implementation of interface elements requires a cohesive constitutive relation
which in WARP3D is defined as a nonlinear traction-separation relationship.
Fig. 3.22 shows the simulation of dynamic fracture of a gas cylinder subjected to internal
gaseous detonation using the finite element method and the interface cohesive element
approach. The simulation has captured a number of key features such as crack flap
bulging and crack branching.
More details are reported in: Mirzaei, M., Harandi, A., Karimi, R., "Finite element
analysis of deformation and fracture of an exploded gas cylinder" Engineering Failure
analysis, Article in Press, doi:10.1016/j.engfailanal.2008.10.018.
Fig. 3.22
108
M. Mirzaei, Fracture Mechanics
Codes and Standards
In this final section of this chapter, we will briefly review the implementation of fracture
mechanics concepts and design rules in development of codes and standards for
engineering applications. A comprehensive review of this subject can be found in:
Anderson, Fracture Mechanics Fundamentals and Applications.
THE ASME REFERENCE CURVES
Section XI of the ASME code for Boiler and Pressure Vessel, Rules for In-service
Inspection of Nuclear Power Plant Components, contains guidelines for computing
allowable flaw sizes based on fracture mechanics principles. The code includes reference
curves that give conservative estimates of toughness versus temperature. Different heats
of pressure vessel steel typically display ductile-brittle transitions at different
temperatures. In an attempt to bring all data into a single curve, toughness curves are
generated by compiling KIc, KId (dynamic fracture toughness), and KIa (apparent arrest
toughness) data for several heats of steel over a range of temperatures, and plotting these
results relative to a reference temperature, RTNDT. The RTNDT is defined as the higher of
the following two:
1- The drop weight Nil-Ductility Transition Temperature (NDTT)
2- 33C below the minimum temperature at which the lowest of three Charpy results is at
least 68 Joule.
Accordingly, two reference toughness curves are developed. The less conservative one is
the KIc curve which describes the lower envelope to a large set of KIc experimental data:
K Ic = 36.5 + 3.084 exp 0.036 (T RTNDT + 56 )
(3-74)
The more conservative one is the KIR curve which is a lower envelope to a combined set
of KIc, KId, and KIa data:
K IR = 29.5 + 1.344 exp 0.026 (T RTNDT + 89 )
(3-75)
The above expressions are in SI units.
FAILURE ASSESSMENT DIAGRAMS
The idea behind failure assessment diagrams, proposed by Dowling and Townley, and
Harrison et al., is to give a design envelope in which the component can be considered
safe with regards to both fracture and plastic collapse. For a cracked section, the collapse
stress ( C ) depends on the tensile properties of the material and the crack size relative to
the total cross section of the structure.
109
M. Mirzaei, Fracture Mechanics
Based on the analysis done by Burdekin and Stone, the strip-yield correction for a
through crack in an infinite plate in plane stress is given by:
K eff = ys
8
a 2 ln sec
2
ys
1/ 2
(3-76)
It is argued that for real structures Eq. (3-76) can be modified by replacing ys with the
collapse stress ( C ) for the structure. The obtained expression is then divided by the
linear elastic K to give:
= C
KI
K eff
8
2 ln sec
2 C
1/ 2
(3-77)
The above equation, when rearranged using the following definitions of stress and SIF,
gives:
Kr =
KI
, Sr =
K eff
C
8
K r = S r 2 ln sec S r
2
(3-78)
1/ 2
Fig. 3.23 shows the FAD diagram constructed based on the above expression. The
diagram shows that a brittle material may cause failure by fracture when Kr = 1.0. On
the other hand, the structures made of very tough materials may fail by collapse when
Sr = 1.0. All points inside of the FAD are considered safe.
In 1976, the strip-yield failure assessment was incorporated into a fracture analysis
methodology by the Central Electricity Generating Board (CEGB) in Great Britain, and
became known as the R6 approach. In 1980 the revised version of the R6 document was
published. This version offers practical advice on the application of the strip-yield FAD
to real structures. For example, it recommends that the primary and secondary stress
components may be added to produce the total stress intensity factor. Primary stresses
generally arise from externally applied loads and moments, while secondary stresses are
localized and self-equilibrating. Examples of secondary stresses include weld residual
stresses and thermal stresses. Primary stresses are capable of leading to plastic collapse,
but secondary stresses are not. The latter can, however, contribute to fracture if are tensile
and large near a crack. Nevertheless, there are cases where thermal loading can produce
primary stresses. In linear elastic analyses the total stress intensity is simply the sum of
the primary and secondary components. Since secondary stresses do not contribute to
collapse, only the primary stresses are used to compute Sr.
110
M. Mirzaei, Fracture Mechanics
Fig. 3.23
THE EPRI J ESTIMATION SCHEME
In 1976, Shih and Hutchinson proposed a more advanced methodology for computing the
fracture driving force based on the J-Integral. In the late 1970s and early 1980s, their
approach was developed and validated at the General Electric Corporation in
Schenectady, New York. In 1981 the latest developments were published by the Electric
Power Research Institute (EPRI) as an engineering handbook. According to the EPRI
procedure, the elastic and plastic components of J are computed separately and added to
obtain the total J:
J total = J el + J pl
(3-79)
where J el is computed from the elastic stress intensity factor of an effective crack size:
J el =
K I2 ( aeff
(3-80)
where E = E for plane stress and E = E /(1 2 ) for plane strain conditions. The
parentheses in Eq. (3-80) indicate that KI is a function of effective crack length. The
effective crack length is obtained from a first order Irwin correction as follows:
aeff = a +
1
1 + ( P / P0 )
1 n 1 KI ( a )
n + 1 0
111
(3-81)
M. Mirzaei, Fracture Mechanics
where = 2 for plane stress and = 6 for plane strain conditions. Note that in the
above, K is calculated using the actual crack length.
In order to obtain the plastic component, Eq. (3-26) can be rearranged and solved for J to
give:
J = 0 0 I n r ij
0
n +1
% ijn +1 (n, )
(3-82)
Since the local stresses must increase in proportion to the remote load for J-controlled
conditions, Eq. (3-82) can be rewritten in terms of P and rearranged to give:
P
J = 0 0 hL
P0
n +1
(3-83)
where h is a dimensionless parameter that depend on geometry and hardening exponent,
L is a characteristic length for the structure, and P0 is a reference load. Both L and P0
can be defined arbitrarily, and h can be determined by numerical analysis of the
configuration of interest.
It has been shown that the fully plastic equations for J pl , the crack mouth opening
displacement ( V p ), and the load line displacement ( p ) have the following form for most
geometries:
a P
J pl = 0 0bh1 , n
w P0
a P
V p = 0 ah2 , n
w P0
n +1
a P
p = 0 ah3 , n
w P0
(3-84)
n
where b is the length of the uncracked portion of the specimen, a is the crack length, and
h1, h2, and h3 are dimensionless parameters. The reference load ( P0 ) is usually defined
by a limit load solution for the geometry of interest; P0 normally corresponds to the load
at which the net cross section yields. The h factors for various geometries and n values
are tabulated in EPRI reports.
112
M. Mirzaei, Fracture Mechanics
THE J-BASED FAILURE ASSESSMENT DIAGRAMS
The elastic-plastic driving force estimated from the EPRI procedure can also be
expressed in terms of a failure assessment diagram, an idea first proposed by Bloom, and
Shih et al. The J and stress ratios are defined as follows:
Jr =
J el (a )
P
, Sr =
J el (aeff ) + J pl
P0
(3-85)
THE REFERENCE STRESS APPROACH
The EPRI equations for fully plastic J assume a simple power law for the materials
plastic stress-strain curve. Ainsworth modified the EPRI relationships to be more
representative of the flow behavior of real materials. He defined a reference stress as:
P
0
P0
ref =
(3-86)
Substituting the above into Eq. (3-83) gave:
ref 0
J pl = ref bh1 ref
(3-87)
in which the reference strain is defined as the total axial strain when the material is
loaded to a uniaxial reference stress. Eq. (3-87) was considered applicable to all types of
stress-strain behavior, but still contained h1, the geometry factor which depends on the
power law hardening exponent n. Ainsworth assumed that h1 (n) h1 (1) , where h1 (n) is
the geometry constant for a material with a strain hardening exponent of n and h1 (1) is the
corresponding constant for a linear material. As a result, he was able to relate the plastic
J to the linear elastic stress intensity factor by:
K I2 E ref
J pl =
1
E ref
(3-88)
where = 0.75 for plane strain and = 1.0 for plane stress. Eq. (3-88) makes it possible
to estimate Jpl from an elastic geometry correction factor, so it is simpler than the EPRI
approach. Ainsworth made additional simplifications and modifications to the reference
stress model in order to express it in terms of a failure assessment diagram. This FAD has
been incorporated into a revision of the R6 procedure.
113
M. Mirzaei, Fracture Mechanics
THE PD 6493 APPROACH (BS 7910)
In a previous section of these notes, the basic concepts and formulation of the CTOD
design curve approach was explained. In 1980 this approach was incorporated into the
British Standards document PD 6493. In this document, cracks of various shapes are
related to an equivalent through-thickness crack. For example, assume that the structure
contains a surface semi-elliptical crack with certain size. The equivalent throughthickness crack is considered to be the one that produces the same stress intensity when
loaded to the same stress. The PD 6493 approach accounts for complex stress
distributions by considering the maximum total strain in the cross section, which is of
course a conservative approach. The maximum strain includes both primary and
secondary stresses.
The revised PD 6493 procedure, which was published in 1991, utilizes a three-tier
approach. The three-tier philosophy addresses fracture problems through assignment of
an appropriate level of complexity and accuracy to each particular case. All three levels
are expressed as failure assessment diagrams, which in Level 1 are consistent with the
CTOD design curve approach, in Level 2 with the strip yield model, and in Level 3 with
the reference stress approach. The new document also contains more accurate procedures
for analyzing secondary stresses. The latest revised procedure is BS 7910:2005.
114
M. Mirzaei, Fracture Mechanics
Chapter 4
FATIGUE
It has been known for a long time that a component subjected to fluctuating stresses may
fail at stress levels much lower than its monotonic fracture strength. The underlying
failure process involves a gradual cracking of the component and is called Fatigue.
Fatigue is an insidious time-dependent type of failure and can occur without any obvious
warning. It is believed that more than 95 percent of all mechanical failures can be
attributed to fatigue. There are normally three distinct stages in the fatigue failure of a
component, namely: Crack Initiation, Incremental Crack Growth, and Final Fracture.
Fatigue crack initiation usually occurs at free surfaces because of the higher stresses and
the higher probability of the existence of defects at these locations (existence of corroded
or eroded areas, scratches, etc.). Nevertheless, even at highly-polished defect-free
surfaces, fatigue cracks can initiate through repeated microplastic deformations which
result in the formation of intrusions and extrusions on the surface. The former can act
as local stress concentration sites which may eventually lead to the formation of
microcracks (see Fig. 4.1).
Extrusions
Slip Planes
microcrack
Intrusions
Fig. 4.1. Schematics of fatigue crack initiation.
Fatigue crack propagation occurs through repeated crack tip blunting and sharpening
effects which are in turn caused by microplastic deformation mechanisms operating at the
crack tip (see Fig. 4.2).
115
M. Mirzaei, Fracture Mechanics
Fig. 4.2. Schematics of fatigue crack propagation.
A macroscopic examination of fatigue failures reveals several distinct fracture surface
markings. In general, the fracture surface is flat with no sign of significant plastic
deformation, except for the portion related to the final rupture. For fatigue failures which
occur over a long period of time, the fracture surface may contain characteristic markings
which are called beach markings or clam shell markings. These markings, which are
recognizable even by naked eye (see Fig. 4.3, left), reflect the occurrence of different
periods of crack growth. On the other hand, there are extremely fine markings called
striations, which represent the crack growth due to individual loading cycles and can
only be seen at very high magnifications using electron microscopes (see Fig. 4.3, right).
Fig. 4.3. Left: fracture appearance of different stages of fatigue failure, including
the beach markings. Right: typical striations which form during the growth period.
Fatigue problems in engineering design are treated by three different approaches as
briefly described in sequel.
Classical Fatigue Approach
The classical approach to fatigue (also referred to as Stress Controlled Fatigue or High
Cycle Fatigue (HCF)) through S/N or Whler diagrams constitutes the basis of the SAFE
LIFE philosophy in design against fatigue. In order to determine the strength of materials
under the action of fatigue loads, specimens with polished surfaces are subjected to
116
M. Mirzaei, Fracture Mechanics
repeated or varying loads of specified magnitude while the stress reversals are counted up
to the destruction point ( see Fig. 4.4).
Fig. 4.4: Rotating-Bending fatigue testing machine
The number of the stress cycles to failure can be approximated by the WOHLER or
S-N DIAGRAM, a typical example of which is given in Fig. 4.5.
Fig. 4.5: A typical S-N diagram
In HCF terminology, the following notions can be defined:
The Range of the stress cycle which will cause failure in (N) repetitions can be defined as
S = Smax S min
Sa = the alternating stress, which is 1/2 the Range of Stress:
S Smin
S a = max
2
N = the Fatigue Life;
Su = the Ultimate Tensile Strength of the material
117
M. Mirzaei, Fracture Mechanics
SN = the Fatigue Strength to N Cycles
Sf = the Fatigue or Endurance Limit of the material, corresponding to the median
fatigue strength as the fatigue life becomes very large.
Other important definitions are:
Load Ratio, R =
S min
Smax
Mean or Static Stress, S mean =
Smax + Smin
2
The original Wohler diagram defines the fatigue failure surface when the Smean is zero
and no fatigue strength reducing factors are involved. It is usually constructed on either
an arithmetic-logarithmic or a logarithmic-logarithmic scale. Attempts have been made
to express the shape of the S-N diagram in mathematical form, one simple form of these
equations is:
log S N = A log N + B
103 < N < 106
S
1
A = log 0.9 u
3
S f
( 0.9 Su )2
B = log
S f
(4-1)
Real components differ markedly from the laboratory specimens usually used for
generating the S-N Diagrams. Hence, the fatigue strength S-N curve (shown in Fig. 4.5
for zero mean stress) should be adjusted for the effects of various modifying factors:
N = M f SN
(4-2)
where Mf is the product of several fatigue strength modifying factors and may be defined
as:
M f = msur msize mrel mload mtemp mconc mmisc
These factors are attributed to the followings:
msurf = surface finish
msize = size
mrel = reliability
mload = load
mtemp = temperature
mconc = stress concentration
mmisc = miscellaneous effects
118
(4-3)
M. Mirzaei, Fracture Mechanics
Low Cycle Fatigue Approach
Based on the LCF LOCAL STRAIN PHILOSOPHY, fatigue cracks initiate as a result of
repeated plastic strain cycling at the locations of maximum strain concentration. It is also
assumed that the most highly strained region can be represented by a filament of material
whose mechanical response is similar to that of a smooth specimen. The basic
assumptions of the LCF approach can be summarized as:
a) The fatigue crack initiation of a notched member can be considered to occur by the
rupture of a filament of the material located nearest the surface in the vicinity of the stress
raiser.
b) Under appropriate control, a smooth specimen can be used to reproduce the stressstrain history of the filament (see Fig. 4.6).
c) For identical stress-strain histories of the filament and smooth specimen, the fatigue
life of the smooth specimen can be taken as the fatigue life of the filament i.e., the crack
initiation life (see Fig. 4.6).
In LCF, the terminology crack initiation is used in the sense of the number of fatigue
cycles required to either fail the smooth specimen or the filament.
Fig. 4.6: Schematic representation of crack initiation according to LCF
The necessary requirements for a LCF life assessment program can be summarized as
below:
1. A mechanics analysis for the determination of the stress-strain behavior at the critical
location (notch).
2. A knowledge of the cyclic stress-strain properties of the material to determine the
response of the material at the notch to remotely applied stresses.
3. A knowledge of the low cycle fatigue properties of the material for use in an
appropriate cumulative damage assessment procedure (see Fig. 4.7).
119
M. Mirzaei, Fracture Mechanics
Fig. 4.7: Schematic representation of cyclic strain-life curves
4. A cumulative fatigue damage rule to accurately predict the LCF life for an arbitrary
loading sequence
5. A method of combining 1-4 such that the LCF initiation life of a notched member
subjected to any arbitrary loading sequence can be calculated on a reversal by reversal
basis using computer simulation methods (see Fig. 4.8).
Stress Analysis
Stress-Strain
Curve
Notch
Sensitivity
Stress-Life
Curve
1/Nf
f
Stress-Strain
Model
Local
Stress-Strain
Cycle
Counting
Fatigue
Life
Cumulative
Damage
Loading History
Fig. 4.8: Schematic representation of LCF life assessment activities
120
M. Mirzaei, Fracture Mechanics
Fracture Mechanics Approach
If a crack exists in the component before it goes into service (for example due to weld
fabrication) the initiation stage is by-passed and the fatigue failure process consists of the
incremental crack growth and the final fracture stages. Crack propagation normally
occurs at right angles to the principal tensile stress direction. In practice, however, most
fatigue failures are in the low stress region (much less than the yield stress) where the
LEFM is likely to be valid. Hence, the LEFM principles can be applied to predict
incremental fatigue crack growth. In fact, extensive fatigue tests on a wide variety of
materials show that the stress intensity factor is a much more effective parameter in
describing fatigue propagation than the stress amplitude. The key point of these tests is
that the rate of crack propagation, measured in terms of incremental crack growth per
cycle of loading, depends primarily on the range of crack tip stress intensity, as follows:
da
= f (K )
dN
(4-4)
The most widely used expression, proposed by Paris, is:
(4-5)
da
= C (K ) m
dN
in which C and m are material properties obtained from experiment.
The standard methods for fatigue crack growth tests can be found under ASTM E647.
The most commonly used specimen in fatigue crack propagation studies is the C(T) or
compact tension specimen (see Fig 4.9).
Fig. 4.9
121
M. Mirzaei, Fracture Mechanics
Fig. 4.10 is a schematic presentation of a servo-hydraulic mechanical testing machine
which is usually used for various types of fatigue testing.
Fig. 4.10
Fig. 4.11 shows a typical crack-growth-rate versus stress-intensity-range diagram. Three
regions of different behavior can normally be identified on such data presentations:
1. The threshold region is attributed to very low levels of Ks, where the crack does
not propagate. The threshold region is strongly influenced by the mean stress.
2. The stable propagation region where the crack grows incrementally according to
the Paris law (Eq. (4.5)).
3. The final unstable region, where the crack propagates more rapidly, often in a less
uniformly incremental manner. In the unstable region, various mechanisms are
responsible for the increased growth rate.
122
M. Mirzaei, Fracture Mechanics
Fig. 4.11
Crack Tip Shielding
The stress intensity factor range is generally obtained from a complete analysis of the
applied loading and geometry. Although these analyses are based on global
considerations, they are assumed to characterize the local field. In practice, the local
near-tip driving force may differ from the nominal stress intensity factor due to some
local mechanical, microstructural, or environmental phenomena in the vicinity of the
crack tip. This process is generally referred to as crack tip shielding which can cause
extrinsic toughening (see Fig. 4.12). The origins of the above argument go back to 1968
when it was discovered that a fatigue crack may remain closed, during a significant
portion of a loading cycle, due to elastic constraints acting on the plastically stretched
material in the crack wake.
The occurrence of crack closure, which is now recognized as being due to a variety of
mechanisms, significantly affects the local crack driving force (stress intensity factor) and
plays a crucial role in fatigue crack growth or arrest characteristics (see Fig. 4.13). While
the qualitative interpretation of the closure phenomena can be used to justify a large
number of fatigue crack growth anomalies, the quantitative knowledge of the crack
closure stress intensity level is required to correlate fatigue crack growth rate data.
123
M. Mirzaei, Fracture Mechanics
EXTRINSIC TOUGHENING MECHANISMS
1. CRACK DEFLECTION AND MEANDERING
2. ZONE SHIELDING
* transformation toughening
* microcrack toughening
* crack wake plasticity
* crack field void formation
* residual stress fields
* crack tip dislocation shielding
3. CONTACT SHIELDING
* wedging :
corrosion debris-induced closure
crack surface roughness-induced closure
* bridging :
ligament or fiber toughening
* sliding :
sliding crack surface interference
* wedging + bridging :
fluid pressure-induced closure
4. COMBINED ZONE AND CONTACT SHIELDING
* plasticity-induced closure
* phase transformation-induced closure
Fig. 4.12: A general classification of extrinsic toughening mechanisms
plastic wake
Plastic Zone
(a)
(b)
Plasticity-Induced
Roughness-Induced
Crack Closure
Crack Closure
Transformed Zone
Oxide Debris
(c)
(d)
Oxide-Induced
Phase Transformation-Induced
Crack Closure
Crack Closure
Viscous Fluid
(e)
Viscous Fluid-Induced
Crack Closure
Fig. 4.13: A general classification of the mechanisms of crack tip closure.
124
M. Mirzaei, Fracture Mechanics
Fatigue Life Prediction
The useful aspect of fatigue crack growth laws is that they can be used to calculate the
number of cycles required to propagate a crack from a given initial size to some final size
which is critical for failure. Thus if the initial size is ai and the final size af we may write:
da
= C (K ) m
dN
N
dN =
1
da
C (K ) m
af
1
1
0 dN = C a ( a)1/ 2 m da
i
(1 m / 2)
a f
ai1 m / 2
1
N=
C m ( ) m m / 2
1 m / 2
(4-6)
In the above equations, the geometric factor is assumed to be constant because the
inclusion of a function of a/W within the integral sign will usually lead to a formulation
which cannot be integrated analytically. In practice, it is more straightforward and very
often sufficiently accurate to solve the fatigue life equation by splitting the crack growth
history into a series of crack increments. An average value within each step may then be
used to calculate and hence an average K is considered during the step. The average
propagation rate within the step can then be calculated from the Paris Law. In the case of
a pressure vessel, af may simply be defined in terms of a crack big enough to cause
leakage, or one which results in the limiting fracture toughness being reached. In sequel,
we will briefly introduce two software tools commonly used for fatigue crack growth
studies.
Assignment:
A rotating shaft is made of an alloy-steel for which we have:
K IC = 54 MPa m
da
(mm/cycle) = 7.72 10-8 K eff (MPa m)
dN
1 br
K eff =
K
1 r
(r < 0, b = 0.219), (0 r , b = 1)
where, r is the stress ratio. The shaft is subject to an alternating stress range of
= 180 MPa and contains a crack of half length a=0.2 mm. Assuming a geometric
factor of =1, calculate the number of cycles to fracture for stress ratios of 0 and -1.
125
M. Mirzaei, Fracture Mechanics
NASGRO
The NASGRO computer software was initially developed to provide an automated
procedure for fracture control analysis of NASA space flight hardware and launch
support facilities. It is also applicable to stress and fracture mechanics analysis of aircraft
and non aerospace structures and may be used as a learning and research tool in fracture
mechanics. NASGRO is a collection of computer programs comprised of three modules:
called NASFLA, NASBEM and NASMAT. The NASFLA program uses fracture
mechanics principles to calculate stress intensity factors, compute critical crack sizes, or
conduct fatigue crack growth analyses. Material properties for crack growth can be
obtained from the database supplied with the program, or entered either as a 1-D table or
a 2-D table. The fatigue loading spectra can be input from a standard file or individual
files. User-defined materials properties and fatigue spectra may also be supplied
manually. The second module NASBEM implements the boundary element method for
stress analysis and can be used to obtain stress intensity factors and stresses for twodimensional geometries with holes and cracks. The third module NASMAT can be used
to enter, edit and curve-fit fracture toughness and fatigue crack growth data obtained in a
laboratory.
Crack Growth Relationship
Crack growth rate calculations in NASGRO 3.0.20 use a relationship called the
NASGRO equation. Different elements of this equation were developed by Forman and
Newman of NASA, Shivakumar of Lockheed Martin, de Koning of NLR, and Henriksen
of ESA. It was first published by Forman and Mettu and is given by:
p
Kth
n 1
da
1 f
K
K
= C
q
dN
1 R
Kmax
1
Kc
(4-7)
where N is the number of applied fatigue cycles, a is the crack length, R is the stress ratio,
K is the stress intensity factor range, and C, n, p, and q are empirically derived
constants. The crack opening function, f, for plasticity-induced crack closure has been
defined by Newman as:
f =
Kop
Kmax
max ( R, A0 + A1 R + A2 R 2 + A3 R 3 )
R0
=
A0 + A1 R
2R<0
(4-8)
and the coefficients are given by:
A0 = ( 0.825 0.34 + 0.05 2 ) cos( 2 Smax / 0 )
A1 = ( 0.415 0.071 ) S max / 0
(4-9)
126
M. Mirzaei, Fracture Mechanics
A 2 = 1 A 0 A1 A 3
A3 = 2 A0 + A1 1
In these equations, is a plane stress/strain constraint factor, and S max / 0 is the ratio of
the maximum applied stress to the flow stress. The factor has been treated as a constant
for the purposes of curve fitting the crack growth data for each particular material system.
Values range from 1 (for plane stress) to 3 (for plane strain). The ratio of the maximum
applied stress to the flow stress ( Smax/0) is assumed to be constant. Most materials that
were curve fit for NASGRO 3.0.20 use a value of Smax/0 = 0.3, which was chosen
because it is close to an average value obtained from fatigue crack growth tests using
various specimen types. The threshold stress intensity factor range in Eq. (4.7) (Kth) is
approximated by the following empirical equation:
a
K th = K 0
a + a0
1 f
/
(1 A0 )(1 R)
(1+ Cth R )
(4-10)
where R is the stress ratio, f is the Newman closure function, A0 is a constant (Eq. 4.9)
used in f , K0 is the threshold stress intensity factor range at R = 0, Cth is an empirical
constant, a is the crack length, and a0 is an intrinsic crack length. Values of Cth for
positive and negative values of R , and K0 are stored as constants in the NASGRO
materials files. The intrinsic crack size a0 has been assigned a fixed value of 0.0015 in.
(0.0381 mm).
In practice, some materials exhibit a very small stress ratio effect. In these special cases,
a curve-fitting option that allows the crack opening function to be bypassed is used. The
parameters for this bypass option are = 5.845, Smax/0 = 1.0. These values are selected
in order that f in Eq. (4.9) would be equal to zero for negative stress ratios and would be
equal to R (Kop = Kmin) for 0 R < 1. Thus, for positive stress ratios, the crack growth
relationship (Eq. (4.7)) reduces to:
K th
CK 1
da
=
dN
K
1 max
Kc
(4-11)
where the entire K range contributes to crack propagation. For negative stress ratios,
the reduced expression is:
127
M. Mirzaei, Fracture Mechanics
da
=
dN
CK
n
max
K th
K
1 max
Kc
(4-12)
Version 4.0 (and subsequent versions) of NASGRO have been developed and are
distributed under the terms of Space Act Agreement between NASA and Southwest
Research Institute. These versions of NASGRO will require purchasing a license.
AFGROW
AFGROW, which is a software tool for analysis of fatigue crack initiation and growth in
metallic structures, has emerged from a number of computer programs developed at the
Air Force Wright Aeronautical Laboratories (AFWAL/FIBEC). AFGROW implements
five different material models (Forman Equation, Walker Equation, Tabular lookup,
Harter-T Method and NASGRO Equation) to determine crack growth per loading cyclic.
Other user options include five load interaction (retardation) models (Closure,
FASTRAN, Hsu, Wheeler, and Generalized Willenborg), a strain-life based fatigue crack
initiation model, and the ability to consider the effect of the bonded repair. AFGROW is
a very powerful tool for fatigue crack growth studies of aircraft and non aerospace
structures and may be used as a learning and research tool in fracture mechanics.
It can be downloaded at: http://www.siresearch.info/projects/afgrow
Demonstration
In this section, we will briefly review the simulation of fatigue crack growth in a
detonation tube using AFGROW and FRANC3D codes. More details are reported in:
Mirzaei, M., Salavatian, M, Biglari, H., "Simulation of Fatigue Crack Growth in a
Detonation Tube," Proceedings of the ASME PVP-2006 /11th International Conference
on Pressure Vessel technology, ICPVT-11, 23-27 July 2006, Vancouver, Canada.
In this work, we studied the cyclic growth of a pre-existing crack in a pressure vessel
subjected to repeated internal gaseous explosions. Such situation may occur in pipeline
systems, pressurized aircraft fuselages, rocket casings, pulse detonation engines (PDE),
and similar engineering applications. In practice, the internal detonation loading of
cylindrical tubes involves loads that propagate at high speeds, causing the formation of
flexural waves in the tube wall. These waves can result in high strains, which may
exceed the equivalent static strains (caused by the same nominal loading pressure) by up
to a factor of 4. Moreover, every single blast initiates a spectrum of vibrational strains
which includes both original and reflected waves as shown in Fig. 4.14.
128
M. Mirzaei, Fracture Mechanics
Fig. 4.14. (a): experimental result for detonation velocity of 1478.8 m/s.
(b): prediction of the main signal by an analytical model. (c): prediction of the
main signal and the reflected waves by an analytical model.
Two different methods were used for fatigue life calculations. In the first method, the
stress analysis results of an analytical model were combined with the crack growth
simulation capabilities of the AFGROW software. In the second method, fatigue life
calculations were performed by a cycle-by-cycle integration of the desired growth rate
expression along the crack path using FRANC3D. The growth rate expression was the
Paris model modified to incorporate fatigue crack closure.
Fig. 4.15. Loading spectrums.
129
M. Mirzaei, Fracture Mechanics
The fatigue lives were predicted using three different design approaches described below:
A. Design through the consideration of the maximum pressure multiplied by an
amplification factor to simulate the dynamic effects,
B. Design through the consideration of the vibrational spectrum due to traveling
load,
C. Design through the consideration of the vibrational spectrum due to the traveling
load, plus the reflected waves.
Different loading spectrums related to the above approaches are depicted in Fig. 4.15.
Fig. 4.16 shows crack growth curves for the detonation velocity of 1478.8 m/s, obtained
based on the above three design approaches. It is seen that for each design approach
there is a good agreement between the two different methods of crack growth modeling,
although in general, the FRANC3D simulations predict shorter lives. Nevertheless, the
striking fact is that the predicted lives obtained based on the design approach C (the full
loading spectrum) are almost twenty times less than those obtained from design A (the
simplistic assumption of a single loading cycle multiplied by a dynamic amplification
factor). The difference between the two approaches B and C is also significant,
indicating the importance of the reflected waves in reducing the fatigue life. The above
simulations indicate that realistic fatigue life predictions for tubes subjected to internal
detonation require the consideration of the entire spectrum. Failure to do so can result in
life estimations which are orders of magnitude more than real lives. Hence, in such
situations, the usual practice of design based on the simplistic assumption of a single
loading cycle modified by a dynamic load factor can be quite non-conservative and very
dangerous.
FRANC3D-Design A
FRANC3D-Design B
FRANC3D-Design C
AFGROW-Design A
AFGROW-Design B
AFGROW-Design C
Crack Length (mm)
0.025
0.02
0.015
0.01
0.005
1.E+02
1.E+03
1.E+04
1.E+05
Number of Cycles
Fig. 4.16. crack growth curves for detonation velocity of 1478.8 m/s.
130
M. Mirzaei, Fracture Mechanics
CREEP
Creep can be defined as a time-dependent deformation of materials under constant load
(stress). The resulting progressive deformation and the final rupture can be considered as
two distinct (yet related) modes of failure. For metals, creep becomes important at
relatively high temperatures, i.e., above 0.3 of their melting point in Kelvin scale.
However, for polymers substantial creep can occur at room temperature. Creep tests are
usually performed under constant load, as shown in Fig. 4.17. The general procedures for
these tests can be found in ASTM E139-69.
Fig. 4.17. Creep testing machine
Fig. 4.18 shows a typical creep curve which usually includes:
initial elastic strain, which occurs immediately upon application of load,
primary creep, where the strain rate gradually decreases due to strain hardening,
secondary or steady state creep, where the balance between strain hardening and
softening processes result in a constant creep rate,
tertiary creep, which includes material separation at micro level and leads to final
rupture.
131
M. Mirzaei, Fracture Mechanics
Fig. 4.18
As shown in Fig. 4.19, the above mentioned processes can operate locally at the tip of a
pre-existing crack and lead to further crack growth.
Elastic
Tertiary
Steady State
Primary
Fig. 4.19. Creep zones ahead of crack tip
It should be mentioned that for short-term applications at high temperatures we may use
the pertinent time-independent mechanical properties such as yield or tensile strength to
define the design regime. However, for the long term exposure to loadings at high
temperatures, the design regime should be adjusted according to the creep curves. The
time-dependent constitutive equations can be constructed using a variety of the
combinations of the two basic mechanical elements, i.e., the spring and the dashpot
elements, which represent linear-elastic and viscous behaviors respectively.
132
M. Mirzaei, Fracture Mechanics
Creep Crack Growth
The structural components that are subjected to uniform loading and uniform temperature
distribution during service are vulnerable to widespread bulk damage due to creep. On
the other hand, for components that are subjected to stress and temperature gradients it is
likely that creep cracks initiate at critical locations and propagate to cause failure.
Similar to fatigue crack growth modeling, we need appropriate crack-tip parameters to
correlate creep crack growth data. Depending on the material and on the extent of creep
deformation at the crack tip, various parameters have been successfully used to correlate
the rates of creep crack growth. In general, three regimes of creep crack growth can be
distinguished for materials exhibiting power-law creep behavior, depending on the size of
the crack-tip creep zone relative to the specimen dimensions (see Fig. 4.20).
Elastic
Creep Zone
Elastic
Creep Zone
Elastic
Creep Zone
Fig. 4. 20. From left: Small-Scale-Creep, Transitional Creep, and Steady-State-Creep
conditions.
The two major parameters used for correlating creep crack growth data are the stress
intensity factor K and the integral C*. The time-dependent energy Integral, C*, is similar
to the J-Integral, but is written in terms of strain rates instead of strain:
u&
& ij n j i ds
C * = wdy
x
(4-13)
in which
&kl
w& = ij d ij
(4-14)
The applicability of K is limited to situations where the size of the crack-tip creep zone is
small relative to the crack length and other geometric parameters of the component. This
is the so-called Small Scale condition (SSC), as opposed to the Steady State condition
(SS) in which the crack propagation is accompanied by extensive creep deformation
ahead of the crack tip. In the latter condition, the path-independent integral C* is usually
used. The transition time for SSC condition to turn to SS condition can be estimated by :
133
M. Mirzaei, Fracture Mechanics
t1 =
1 + 2 n K 2 (t1 )(1 2 )
n +1
C * (t1 ) E
(4-15)
in which is dependent on the waveform of loading and is defined by:
K (t ) = K1t
(4-16)
where K(t) is the applied stress intensity parameter as a function of time and K1 is a
constant, is the Poissons ratio, E is the elastic modulus, n is the Norton Law exponent,
and C* is the creep integral. If the cycle time tC is less than t1 then K is the correct crack
tip parameter for correlating creep crack growth.
Fig. 4.21
Demonstration
As a demonstration of the material covered above, we will briefly review the stress
analysis and life assessment of a first-stage air-cooled blade made of the superalloy
IN738LC. More details are reported in: Mirzaei, M., Karimi, R., "Stress Analysis and
Life Assessment of a Gas Turbine Blade," Proceedings of the 10th International Congress
of Fracture, (ICF10) USA. 2001.
The most severe cyclic duty for an industrial turbine blade is the peak-load generation
commonly experienced in the utility combined-cycle plants, where the blades are
134
M. Mirzaei, Fracture Mechanics
subjected to frequent startups and shutdowns and also large numbers of working hours. In
this study, three-dimensional finite element thermal and stress analyses of the blade were
carried out for the steady-state full-load operation. The results of these analyses were
used for determination of the regions where the combination of high temperature and
high tensile stress was sufficient for significant creep-fatigue crack growth. Accordingly,
a critical point at the leading edge of the airfoil, near the root, was selected for crack
modeling. With the assumption of occurrence of small-scale creep and thermal-fatigue
during each start-stop cycle, the pertinent crack tip parameters were calculated using the
energy domain integral method. An incremental crack growth scheme was considered
and the total life for the growth of a 0.5mm surface crack to a 5mm through-thickness
crack was calculated.
(a)
(b)
Fig. 4.22: a) Finite Element mesh of the entire blade. b) Contours of maximum
principal stress due to the mechanical loadings (stresses are in Pascal).
The thermal and mechanical stress analyses were carried out using the general-purpose
finite element package LUSAS. Fig. 4.22a depicts the finite element mesh of the entire
blade. Fig. 4.22b shows the distribution of the maximum principal stress component, due
to the centrifugal and pressure loadings, in the airfoil. It is clear that the maximum
tensile stress occurs at the suction side of the airfoil near the root. However, if the
mechanical and thermal stresses are combined, the location of the maximum tensile stress
will shift to the corner of an internal rib, which is in fact the coolest point according to
the thermal analysis results depicted in Fig.4.23a. The results also indicate that the
leading edge is the hottest region of the blade. Hence, the crack modeling was performed
in a critical region of the leading edge near the root, in spite of relatively lower tensile
stresses in this region.
As previously mentioned, the two major parameters used for correlating creep crack
growth data are the stress intensity factor K and the integral C*. The applicability of K is
135
M. Mirzaei, Fracture Mechanics
limited to situations where the size of the crack-tip creep zone is small relative to the
crack length and other geometric parameters of the component.
Since the IN738LC is a high-strength creep-resistant material and the start-stop cycletime of the peak load turbines are usually less than 10 hours, the assumptions of SSC
condition and validity of applying K as the correlation parameter were considered in this
study.
(a)
(b)
Fig. 4.23: a) Temperature distribution in a section of the airfoil near the root (C).
b) Modified finite element mesh at the same section for crack modeling.
Fig. 4.23b depicts the section of the airfoil at the crack location, where the mesh was
refined for crack modeling. Several procedures are available for numerical evaluation of
stress intensity factors. In this study we used the energy domain integral method for
calculation of the J-Integral and the SIF. The general formulation of the energy domain
integral method in the absence of plastic strains and crack surface tractions can be written
as:
u j
u j
q
W 1i
+ ii
Fi
J = ij
q dA
x1
x1
x1
xi
A*
(4-17)
kl
in which W is the stress work given by: W = ij d ij
0
In the above equations A* is the integration area, ij and ij are the Cauchy stress and
strain tensors, uj is the displacement vector, is the Kronecker delta, q is an arbitrary
function that is equal to unity on 0 and zero on 1 (the inner and the outer integration
paths respectively), is the coefficient of thermal expansion, is the temperature, and Fi
are body forces. The discretized form of the above expression was evaluated for different
crack lengths. Accordingly, the K values were calculated using the following expression:
J =
(1 ) K
2
(4-18)
2
I
136
M. Mirzaei, Fracture Mechanics
Finally, using a regression analysis, the following expression was obtained for the
variation of K with the crack length at the desired region:
(4-19)
K I = 58.4 a 0.206
The total crack growth per working cycle, da/dN, was then expressed as:
da
da
=
dN dN
tC
Fatigue
+ a& ( K )dt
(4-20)
in which, tC is the holding time during each start-stop cycle. Using the pertinent
experimental results for IN738LC, the numerical integration of the above equation
between the two crack lengths of 0.5mm and 5mm, for a holding time of 8 hours, resulted
in a total life of 11368 hours and 1421 start-stop cycles. The obtained results were
consistent with the observations reported by Bernstein and Allen, who performed detailed
failure analysis of cracked first-stage blades, for General Electric MS1001E industrial gas
turbine, made of IN738LC. For an 11000-hour blade with 874 start-stop cycles, they
observed a 0.5mm crack at the leading edge of the blade. They observed extensive
leading edge cracking for a blade that had experienced 1800 start-stop cycles and 24000
hours of operation, with cracks penetrated through to the leading edge cooling hole.
137
You might also like
- Shaving MethodsDocument7 pagesShaving MethodsSunilkumar ReddyNo ratings yet
- Buckling - EquationsDocument66 pagesBuckling - EquationsricardoborNo ratings yet
- Dynamic Stress and Strain PropertiesDocument28 pagesDynamic Stress and Strain Propertiesmsh2005100% (1)
- Bolted Joints in Composite Aircraft StructuresDocument4 pagesBolted Joints in Composite Aircraft StructuresZiggy Gregory100% (2)
- M mMatthewDimensions06paperDocument15 pagesM mMatthewDimensions06paperCADTDD100% (1)
- Nonlinear Total Strain Vs Linear Strai1Document32 pagesNonlinear Total Strain Vs Linear Strai1Dasaka BrahmendraNo ratings yet
- The Stress Analysis of Cracks Handbook - 3rd EditionDocument696 pagesThe Stress Analysis of Cracks Handbook - 3rd EditionGustavo PessoaNo ratings yet
- Damage Tolerance of Laminated Composites Containing An Open Hole and Subjected To Compressive Loadings - Part I - AnalysisDocument42 pagesDamage Tolerance of Laminated Composites Containing An Open Hole and Subjected To Compressive Loadings - Part I - AnalysisEstebanNo ratings yet
- Structural Design Requirements and Factors of Safety For Spaceflight HardwareDocument52 pagesStructural Design Requirements and Factors of Safety For Spaceflight HardwareprasannaNo ratings yet
- AN6204Document4 pagesAN6204CTN2010No ratings yet
- Alcoa Aerospace Briefing June92011Document20 pagesAlcoa Aerospace Briefing June92011Mark Evan SalutinNo ratings yet
- Cylinder BucklingDocument56 pagesCylinder BucklingSJLeemansNo ratings yet
- OrthotropyDocument17 pagesOrthotropyAndrés MercadoNo ratings yet
- 16 PDFDocument23 pages16 PDFSunilkumar ReddyNo ratings yet
- 16 PDFDocument23 pages16 PDFSunilkumar ReddyNo ratings yet
- The Rainflow Method in Fatigue: The Tatsuo Endo Memorial VolumeFrom EverandThe Rainflow Method in Fatigue: The Tatsuo Endo Memorial VolumeNo ratings yet
- A Teaching Essay on Residual Stresses and EigenstrainsFrom EverandA Teaching Essay on Residual Stresses and EigenstrainsNo ratings yet
- Limit Load SolutionsDocument131 pagesLimit Load SolutionsZaid KamardinNo ratings yet
- Behaviour of Sleeved Bolt Connections in Precast Concrete FramesDocument246 pagesBehaviour of Sleeved Bolt Connections in Precast Concrete Framespavan2deepuakiNo ratings yet
- The Evolution of Al-Li Base Products For AerospaceDocument14 pagesThe Evolution of Al-Li Base Products For AerospaceRichard HilsonNo ratings yet
- Post BucklingDocument14 pagesPost BucklingthaoNo ratings yet
- Comparison of Different Calculation Methods For Structural Stresses at Welded JointsDocument11 pagesComparison of Different Calculation Methods For Structural Stresses at Welded JointsBob LoblawNo ratings yet
- Guide For Bolted Join Design and Analysis PernosDocument47 pagesGuide For Bolted Join Design and Analysis PernosjeremiasNo ratings yet
- Asme - PVP2005-71724Document11 pagesAsme - PVP2005-71724sagar1503No ratings yet
- Dowling Material PropertiesDocument17 pagesDowling Material PropertiesCarlos A CuencaNo ratings yet
- Solutions ManualDocument117 pagesSolutions ManualSunilkumar ReddyNo ratings yet
- Review of Fatigue Strength Assessment ofDocument18 pagesReview of Fatigue Strength Assessment ofNrl SyafiniNo ratings yet
- Barutzki PDFDocument9 pagesBarutzki PDFesutjiadiNo ratings yet
- Modelling of Frictional Joints in Dynamically LoadDocument26 pagesModelling of Frictional Joints in Dynamically LoadAaron GalvezNo ratings yet
- Basic Fracture MechanicsDocument16 pagesBasic Fracture MechanicsArjumand MehakNo ratings yet
- BS5500 - 1994-1Document65 pagesBS5500 - 1994-1paeg6512100% (1)
- Assessment Protocol For Nozzle Loads On Pressure VesselsDocument5 pagesAssessment Protocol For Nozzle Loads On Pressure VesselsBramJanssen76No ratings yet
- Structural Strength Assessment For Unlined Steel Stack Using Finite Element Analysis Cst-1017Document8 pagesStructural Strength Assessment For Unlined Steel Stack Using Finite Element Analysis Cst-1017Srinivasa Rao VenkumahanthiNo ratings yet
- Engine GeometryDocument25 pagesEngine GeometryGustavo Espinosa MartinezNo ratings yet
- Robert H. Dodds, Jr. (And Many Others!) : August 2013Document24 pagesRobert H. Dodds, Jr. (And Many Others!) : August 2013afiguerasabmNo ratings yet
- Fracture MechanicsDocument2 pagesFracture MechanicsJOY100% (1)
- FEACrack User Manual v3 - 2Document268 pagesFEACrack User Manual v3 - 2amd mhmNo ratings yet
- (2017 - ASME - Optimization of COPV PDFDocument9 pages(2017 - ASME - Optimization of COPV PDFAdarsh RavindranNo ratings yet
- Nuclear Ap1400Document36 pagesNuclear Ap1400Ian CarrNo ratings yet
- MSC Nastran v67 - Nonlinear HandbookDocument729 pagesMSC Nastran v67 - Nonlinear HandbookAndrew RamesNo ratings yet
- Notch SensitivityDocument7 pagesNotch SensitivityCheng PangNo ratings yet
- Ar97 2 2Document346 pagesAr97 2 2Mona AwadNo ratings yet
- Designing Effective Static Tests For Spacecraft Structures - Sarafin (Ler) - Part2Document1 pageDesigning Effective Static Tests For Spacecraft Structures - Sarafin (Ler) - Part2JizzPontesNo ratings yet
- ASME VIII - DIV.3 (2019) PAUT-ToFDDocument16 pagesASME VIII - DIV.3 (2019) PAUT-ToFDMubeenNo ratings yet
- Creep Resistant Aluminium AlloysDocument13 pagesCreep Resistant Aluminium AlloyssaurabhpetheNo ratings yet
- Brown, Miller - Biaxial Cyclic Deformation Behaviour of SteelsDocument14 pagesBrown, Miller - Biaxial Cyclic Deformation Behaviour of SteelsDavid C Houser100% (1)
- Zimmerlin PDFDocument87 pagesZimmerlin PDFАндрей ИнгельбергNo ratings yet
- Predicting The Penetration and Perforation of FRP Laminates Struck Normally by Projectiles With Different Nose ShapesDocument9 pagesPredicting The Penetration and Perforation of FRP Laminates Struck Normally by Projectiles With Different Nose ShapesDeepesh Kumar100% (1)
- The Analysis of Kissing Bonds in Adhesive JointsDocument7 pagesThe Analysis of Kissing Bonds in Adhesive JointsMihaela NastaseNo ratings yet
- Free Vibration Analysis of Cylindrical Liquid Storage TanksDocument13 pagesFree Vibration Analysis of Cylindrical Liquid Storage TanksJosué Azurín RendichNo ratings yet
- ASCE Failure Case StudiesDocument2 pagesASCE Failure Case StudiesjbautistavNo ratings yet
- Fatigue Curve - S235JR ExperimantalDocument9 pagesFatigue Curve - S235JR ExperimantalPrabath MadusankaNo ratings yet
- Practical Stress Analysis For Design Engineers: Design & Analysis of Aerospace Vehicle Structures by Flabel, Jean-Claude (1997) HardcoverDocument5 pagesPractical Stress Analysis For Design Engineers: Design & Analysis of Aerospace Vehicle Structures by Flabel, Jean-Claude (1997) HardcoverSourabh MNo ratings yet
- Advice - Stress Distribution in Bolt & NutDocument2 pagesAdvice - Stress Distribution in Bolt & NutDarko MurkovićNo ratings yet
- Jet-Lube Reeves Paper PVP2011-57406 Rev 5Document6 pagesJet-Lube Reeves Paper PVP2011-57406 Rev 5Oliver KrausNo ratings yet
- Manson Coffin BasquinDocument11 pagesManson Coffin BasquineankiboNo ratings yet
- Mechanics of Rock CuttingDocument10 pagesMechanics of Rock CuttingAjyant DubeyNo ratings yet
- Elastic Stability of Plates With Circular and Rectangular Holes Subjected To Axial Compression and Bending MomentDocument39 pagesElastic Stability of Plates With Circular and Rectangular Holes Subjected To Axial Compression and Bending Momenthunter111No ratings yet
- MMPDS 11 PreviewDocument24 pagesMMPDS 11 Previewmfregeau3654No ratings yet
- Modern Developments in the Mechanics of ContinuaFrom EverandModern Developments in the Mechanics of ContinuaSalamon EskinaziNo ratings yet
- Modern Practice in Stress and Vibration Analysis: Proceedings of the Conference Held at the University of Liverpool, 3–5 April 1989From EverandModern Practice in Stress and Vibration Analysis: Proceedings of the Conference Held at the University of Liverpool, 3–5 April 1989J. E. MottersheadNo ratings yet
- Fatigue Design Procedures: Proceedings of the 4th Symposium of the International Committee on Aeronautical Fatigue held in Munich, 16–18 June 1965From EverandFatigue Design Procedures: Proceedings of the 4th Symposium of the International Committee on Aeronautical Fatigue held in Munich, 16–18 June 1965E. GassnerNo ratings yet
- Transaxle OilDocument11 pagesTransaxle OilSunilkumar ReddyNo ratings yet
- Constraint Satisfaction Problems: AIMA: Chapter 6Document64 pagesConstraint Satisfaction Problems: AIMA: Chapter 6Sunilkumar ReddyNo ratings yet
- Vehicles Pass-By NoiseDocument2 pagesVehicles Pass-By NoiseSunilkumar ReddyNo ratings yet
- 00643Document9 pages00643Sunilkumar ReddyNo ratings yet
- Simplification and Application of Model F'Document22 pagesSimplification and Application of Model F'Sunilkumar ReddyNo ratings yet
- 09 Numeric ControlDocument3 pages09 Numeric ControlSunilkumar ReddyNo ratings yet
- S-N Curves For Welded, Non-Welded or Improved Welded Details of Marine StructuresDocument13 pagesS-N Curves For Welded, Non-Welded or Improved Welded Details of Marine StructuresSunilkumar ReddyNo ratings yet
- Reamers: Number of Cutting EdgeDocument5 pagesReamers: Number of Cutting EdgeSunilkumar ReddyNo ratings yet
- Conclusions: 7.1 ResultsDocument4 pagesConclusions: 7.1 ResultsSunilkumar ReddyNo ratings yet
- Fatigue Test of Materials and Their Welded Joints Used in Vehicle ManufacturingDocument7 pagesFatigue Test of Materials and Their Welded Joints Used in Vehicle ManufacturingSunilkumar ReddyNo ratings yet
- TV 20 2013 4 655 658Document4 pagesTV 20 2013 4 655 658Sunilkumar ReddyNo ratings yet
- Developing An Induction Heating & Hardening System: Sulieman M.S. Zobly, Abdu I. OmerDocument9 pagesDeveloping An Induction Heating & Hardening System: Sulieman M.S. Zobly, Abdu I. OmerSunilkumar ReddyNo ratings yet