You might also like
- AMI-GFV Manual KW 903-SP Doc No: AMI-GFV TM903-SP Issue: 1 CLASSIFICATION: Commercial in ConfidenceDocument18 pagesAMI-GFV Manual KW 903-SP Doc No: AMI-GFV TM903-SP Issue: 1 CLASSIFICATION: Commercial in ConfidenceMohamed ElhossenyNo ratings yet
- Manual KW991 HR Iss 03 PDFDocument16 pagesManual KW991 HR Iss 03 PDFDanNo ratings yet
- Manual KW941-BiPolar Iss01Document12 pagesManual KW941-BiPolar Iss01MarcinNo ratings yet
- Manual KW903-SP-iss3Document22 pagesManual KW903-SP-iss3MarcinNo ratings yet
- Aiwa CX-NT99LH PDFDocument45 pagesAiwa CX-NT99LH PDFMarcyo Lima100% (1)
- AVR ComparisionDocument7 pagesAVR ComparisionGrupos GeradoresNo ratings yet
- Aiwa+Nsx t929lh CX Nt929Document43 pagesAiwa+Nsx t929lh CX Nt929caririnetworkNo ratings yet
- Aiwa NSX-SZ50Document26 pagesAiwa NSX-SZ50Juan AcostaNo ratings yet
- LM339Document12 pagesLM339sontuyet82No ratings yet
- CX Z1900LHDocument43 pagesCX Z1900LHDavid Argote BellidoNo ratings yet
- KW903-SP: World Leaders in Marine NavigationDocument2 pagesKW903-SP: World Leaders in Marine NavigationBeneDict Ben DNo ratings yet
- Yamaha RX-V2067, HTR-9063, RX-A2000 PDFDocument190 pagesYamaha RX-V2067, HTR-9063, RX-A2000 PDFboroda24100% (1)
- Service Manual: NSX-BL54 NSX-BL54E NSX-BL57Document34 pagesService Manual: NSX-BL54 NSX-BL54E NSX-BL57YaraNo ratings yet
- Aiwa Z Ht730Document46 pagesAiwa Z Ht730Kaspars KruminsNo ratings yet
- Rca ctc179cm Chassis (ET)Document32 pagesRca ctc179cm Chassis (ET)titoritomex100% (1)
- DS19730Document12 pagesDS19730Joel Roberto MolinaNo ratings yet
- Service Manual: XS-G3 XS-G4 XS-G5Document49 pagesService Manual: XS-G3 XS-G4 XS-G5ferdelvastoNo ratings yet
- Ameritron Al 1200 User ManualDocument14 pagesAmeritron Al 1200 User Manualmark777markNo ratings yet
- Aiwa NSX-VC58Document41 pagesAiwa NSX-VC580000AbdielNo ratings yet
- NSX-SZ50 - 2 PDFDocument36 pagesNSX-SZ50 - 2 PDFgnjida100% (1)
- STK433-890-E: 4-Channel Class AB Audio Power IC, 80WDocument10 pagesSTK433-890-E: 4-Channel Class AB Audio Power IC, 80WSelvacellsNo ratings yet
- 100a-Sg A112 Tab3Document78 pages100a-Sg A112 Tab3Tomás PachecoNo ratings yet
- Manual de Servicio Aiwa+Nsx Sz80+Nsx Sz83+Nsx Aj80+Nsx Sz80eDocument47 pagesManual de Servicio Aiwa+Nsx Sz80+Nsx Sz83+Nsx Aj80+Nsx Sz80eCarlos Jesus SerranoNo ratings yet
- Aiwa Nsx-sz900 Cx-nsz900 SMDocument47 pagesAiwa Nsx-sz900 Cx-nsz900 SMc19606100% (1)
- TenTec Owner's Manual Omni-A and D Transceiver and Model 280 Power Supply, 1980.Document91 pagesTenTec Owner's Manual Omni-A and D Transceiver and Model 280 Power Supply, 1980.Bob Laughlin, KWØRL100% (2)
- M/V™ Series Servo Drive: Description Power RangeDocument11 pagesM/V™ Series Servo Drive: Description Power RangeElectromateNo ratings yet
- Yamaha RX v573 HTR 5065Document134 pagesYamaha RX v573 HTR 5065jiktorNo ratings yet
- Em6438 6436 Dual Quick Start GuideDocument10 pagesEm6438 6436 Dual Quick Start GuideReji KurianNo ratings yet
- Conzerv 6438Document10 pagesConzerv 6438Pur WantoNo ratings yet
- KV 21RS20Document40 pagesKV 21RS20Luis Emilio QuiñonesNo ratings yet
- UCM274FDocument8 pagesUCM274F3efooNo ratings yet
- LYNX Audio Amplifier 275W 4 OhmiDocument11 pagesLYNX Audio Amplifier 275W 4 OhmiDanut777750% (2)
- Servo-Turret TroubleshootingDocument4 pagesServo-Turret TroubleshootingJorge TorresNo ratings yet
- Service Manual: MT1191V 19" Color TelevisionDocument23 pagesService Manual: MT1191V 19" Color TelevisionAntonio Jose Rodriguez AlvaradoNo ratings yet
- MODEL TR-110 Modelo Tr-110: Instruction Folder Manual de InstrucciónesDocument14 pagesMODEL TR-110 Modelo Tr-110: Instruction Folder Manual de InstrucciónesfontyflockNo ratings yet
- KALLEY K-TV2xPFDocument17 pagesKALLEY K-TV2xPFNelson David BarrerraNo ratings yet
- ALSTOM Instntneous Voltage Relay VAGM HighResDocument4 pagesALSTOM Instntneous Voltage Relay VAGM HighResMorgan Brooks0% (1)
- M/V™ Series Servo Drive: Description Power RangeDocument11 pagesM/V™ Series Servo Drive: Description Power RangeElectromateNo ratings yet
- Motor Load MonitorDocument4 pagesMotor Load MonitorRenghat RumahorboNo ratings yet
- CTER Polarity TestDocument30 pagesCTER Polarity TestforeverjaiNo ratings yet
- Sony KV 13TR27 Chasis.P 3BDocument29 pagesSony KV 13TR27 Chasis.P 3BTereza Yamileth Coto ENo ratings yet
- OnkyoC701A JP SMDocument21 pagesOnkyoC701A JP SMHelder MartinsNo ratings yet
- Aiwa CX nsz70lh PDFDocument36 pagesAiwa CX nsz70lh PDFAlberto MorenoNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Sony Kf-42we610 Kf-50we610 Kf-60we610 La-2 Projection TV SM (ET)Document156 pagesSony Kf-42we610 Kf-50we610 Kf-60we610 La-2 Projection TV SM (ET)alex_rosasNo ratings yet
- Aiwa+Cx Nsz50lh SMDocument40 pagesAiwa+Cx Nsz50lh SMSandro Aniello LunascoNo ratings yet
- Aiwa CX-ZL500 Manual de ServicioDocument37 pagesAiwa CX-ZL500 Manual de Serviciovanerito100% (1)
- Ev100zx TechDocument83 pagesEv100zx TechJohn Jairo OsornosoNo ratings yet
- KW948MANUALDocument7 pagesKW948MANUALyarizadehNo ratings yet
- Megger BiddleDocument30 pagesMegger BiddleDante FilhoNo ratings yet
- STK 415Document12 pagesSTK 415bbchacinNo ratings yet
- BJM CORP ALL-TEST™ Tech Note: Trans01: Theme: Transformer Testing - 3 Phase TransformersDocument2 pagesBJM CORP ALL-TEST™ Tech Note: Trans01: Theme: Transformer Testing - 3 Phase TransformersvijaysatawNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- 110 Waveform Generator Projects for the Home ConstructorFrom Everand110 Waveform Generator Projects for the Home ConstructorRating: 4 out of 5 stars4/5 (1)
- Influence of System Parameters Using Fuse Protection of Regenerative DC DrivesFrom EverandInfluence of System Parameters Using Fuse Protection of Regenerative DC DrivesNo ratings yet
- 110 Integrated Circuit Projects for the Home ConstructorFrom Everand110 Integrated Circuit Projects for the Home ConstructorRating: 4.5 out of 5 stars4.5/5 (2)
- ECDIS JRC JAN-7201-9201 Instruct Manual BasicDocument294 pagesECDIS JRC JAN-7201-9201 Instruct Manual BasicRanjeet singhNo ratings yet
- Models Impacted by GPS Rollover Cycles - With Serial Number (S/N) DETAILDocument1 pageModels Impacted by GPS Rollover Cycles - With Serial Number (S/N) DETAILRanjeet singhNo ratings yet
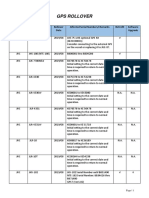
- Gps Rollover: Manufacturer Model Name Rollover Date Affected Serial Numbers/ Remarks Retrofit Software UpgradeDocument7 pagesGps Rollover: Manufacturer Model Name Rollover Date Affected Serial Numbers/ Remarks Retrofit Software UpgradeRanjeet singhNo ratings yet
- Installation Certificate (PT500) Alstom M32Document4 pagesInstallation Certificate (PT500) Alstom M32Ranjeet singhNo ratings yet
- Dpu 414 ManualDocument48 pagesDpu 414 ManualRanjeet singhNo ratings yet
- Liu - Real Time SystemsDocument409 pagesLiu - Real Time SystemsShresth KumarNo ratings yet
- Matlab in Signal ProcessingDocument35 pagesMatlab in Signal Processingmail2poongsNo ratings yet
- Affiah Analogue Communication PDFDocument187 pagesAffiah Analogue Communication PDFaniaffiahNo ratings yet
- M60 Motor Relay: UR Series Instruction ManualDocument454 pagesM60 Motor Relay: UR Series Instruction ManualRizqy FajarNo ratings yet
- Data Acquisition in MATLAB PDFDocument30 pagesData Acquisition in MATLAB PDFjaneprice100% (1)
- Speech RecognitionDocument27 pagesSpeech RecognitionLokendra Singh Shekhawat0% (1)
- Training AnalysisDocument5 pagesTraining AnalysisGanesan SNo ratings yet
- SKKU Course SyllabusDocument65 pagesSKKU Course SyllabusHaNo ratings yet
- Crank Angle EncoderDocument4 pagesCrank Angle EncoderclinthenNo ratings yet
- Et200sp DQ 4x24vdc 2a Hs Manual en-US en-USDocument43 pagesEt200sp DQ 4x24vdc 2a Hs Manual en-US en-USAnonymous j1dZUuTJ8ONo ratings yet
- Sanyo 17mb22 TrainingDocument16 pagesSanyo 17mb22 TrainingTony BinghamNo ratings yet
- Alexander Biedermann, H. Gregor Molter - Design Methodologies For Secure Embedded SystemsDocument215 pagesAlexander Biedermann, H. Gregor Molter - Design Methodologies For Secure Embedded Systemsskipmars2No ratings yet
- Behavioral Modeling of Time-Interleaved ADCs UsingDocument4 pagesBehavioral Modeling of Time-Interleaved ADCs Usingrezam56No ratings yet
- Lecture Notes CS LWS FinalDocument56 pagesLecture Notes CS LWS FinalQuasiNo ratings yet
- 3bse007295r0201 - en Advant Ocs - Open Control System Solution With Advasoft For Windows Advant Controller 110 and AdDocument12 pages3bse007295r0201 - en Advant Ocs - Open Control System Solution With Advasoft For Windows Advant Controller 110 and Adamitpatra009No ratings yet
- S100 IO HardwareDocument268 pagesS100 IO HardwareFilomenaFerreira100% (1)
- Aer403 Lab Manual Rev1.3Document34 pagesAer403 Lab Manual Rev1.3Urshia Likes CookiesNo ratings yet
- Analog Vs Digital CommunicationDocument6 pagesAnalog Vs Digital CommunicationYOGESHNo ratings yet
- Schematic DiagramDocument12 pagesSchematic Diagramalfredo_izquierdo_12No ratings yet
- 04ad SDocument2 pages04ad SPaulo Alexandra SilvaNo ratings yet
- 4 Singapore Analog Behavioral ModelingDocument36 pages4 Singapore Analog Behavioral ModelingRio CarthiisNo ratings yet
- Guidelines Relay SettingDocument468 pagesGuidelines Relay Setting1453h100% (5)
- Design of An ADC Using High Precision Comparator With Time Domain Offset CancellationDocument4 pagesDesign of An ADC Using High Precision Comparator With Time Domain Offset CancellationijtetjournalNo ratings yet
- 5 Izm Communication With Profibus DPDocument68 pages5 Izm Communication With Profibus DPbkalatus1No ratings yet
- Radio Electronics January 1990Document100 pagesRadio Electronics January 1990Jan Pran100% (2)
- User Manual: HGM9200/9300/9400 SeriesDocument65 pagesUser Manual: HGM9200/9300/9400 Seriesnhocti007No ratings yet
- v.3 9 September 2014: Prof. A. A. (Louis) Beex Beex@vt - Edu Lindner@vt - EduDocument4 pagesv.3 9 September 2014: Prof. A. A. (Louis) Beex Beex@vt - Edu Lindner@vt - EdutenpointerNo ratings yet
- Chapter 5-SoundDocument40 pagesChapter 5-SoundCik Ungu100% (1)
- Design and Implementation of Low Power and High Performance 0.13 M CMOS Dynamic Comparator For Analog To Digital ConverterDocument3 pagesDesign and Implementation of Low Power and High Performance 0.13 M CMOS Dynamic Comparator For Analog To Digital ConverterijsretNo ratings yet
- 1MRK505335-UEN - en Technical Manual REB500 8.10 IECDocument72 pages1MRK505335-UEN - en Technical Manual REB500 8.10 IECInsan AzizNo ratings yet