You might also like
- Projects With Microcontrollers And PICCFrom EverandProjects With Microcontrollers And PICCRating: 5 out of 5 stars5/5 (1)
- STM32F0 C Code For Remote Control InputDocument15 pagesSTM32F0 C Code For Remote Control InputLuke Maximo Bell100% (1)
- Main Code Lab 7Document4 pagesMain Code Lab 7William HuangNo ratings yet
- IIR Main:: / Main.c Author: GSIDocument4 pagesIIR Main:: / Main.c Author: GSIAries Nguyễn HòaNo ratings yet
- Adc ProgramDocument3 pagesAdc ProgramMallikarjun DeshmukhNo ratings yet
- Main Code For Lab 6 442Document3 pagesMain Code For Lab 6 442William HuangNo ratings yet
- OS Lab Record - 19Document58 pagesOS Lab Record - 19Rajeshkannan VasinathanNo ratings yet
- SWE2007 - Fundamentals of Operating SystemsDocument6 pagesSWE2007 - Fundamentals of Operating SystemsmaneeshmogallpuNo ratings yet
- DSD RTL Coding Lec8Document31 pagesDSD RTL Coding Lec8Arshad RasheedNo ratings yet
- Soalan PRA MySkills 2013 - Release PublisDocument11 pagesSoalan PRA MySkills 2013 - Release Publisnabilo20No ratings yet
- Assignment 1 ReportDocument19 pagesAssignment 1 ReportJyiou YimushiNo ratings yet
- DS Lab ManualDocument31 pagesDS Lab ManualPiyush MittalNo ratings yet
- Vlsi Architecture Assignment-2 Name: Vithya M BITS ID: 2019HT01605Document11 pagesVlsi Architecture Assignment-2 Name: Vithya M BITS ID: 2019HT01605vithyaNo ratings yet
- Code Eeprom MultiwiiDocument11 pagesCode Eeprom MultiwiiBimo Ahmad YuliarNo ratings yet
- File Do An ThuDocument11 pagesFile Do An Thusanbay phanthietNo ratings yet
- Introduction To Controls & Robotics: EC2481 Year 02 - Semester 02 (2019)Document34 pagesIntroduction To Controls & Robotics: EC2481 Year 02 - Semester 02 (2019)Heshan GamageNo ratings yet
- Main4 CDocument5 pagesMain4 CestonuncahaocurridoNo ratings yet
- Lab 8Document7 pagesLab 8ubaidNo ratings yet
- OS (Tutorial Sheet) (2018UCO1534)Document77 pagesOS (Tutorial Sheet) (2018UCO1534)SpRinTNo ratings yet
- Shadab - DS Lab FileDocument17 pagesShadab - DS Lab FileEdu On PointsNo ratings yet
- Introduction To The H8 (/3048)Document11 pagesIntroduction To The H8 (/3048)Rafik CherniNo ratings yet
- Novo Documento de TextoDocument15 pagesNovo Documento de TextoJonatan Allan Oliveira SouzaNo ratings yet
- Code FinalDocument22 pagesCode FinalKhánh NguyễnNo ratings yet
- Verilog Modules For Common Digital FunctionsDocument30 pagesVerilog Modules For Common Digital Functionselle868No ratings yet
- PC 5Document8 pagesPC 5Miguel RodasNo ratings yet
- Note CCSDocument19 pagesNote CCSThang TruongNo ratings yet
- NCS 751 Lab ManualDocument16 pagesNCS 751 Lab ManualT.Saravanan SaravananNo ratings yet
- Practicles - Solution Distributed System (Google Docs)Document19 pagesPracticles - Solution Distributed System (Google Docs)Chhavi gargNo ratings yet
- Clock System: Appendix DDocument21 pagesClock System: Appendix Dmostafa HusseinNo ratings yet
- Digital Design and Synthesis: Fall 09Document35 pagesDigital Design and Synthesis: Fall 09Lua Dinh ThiNo ratings yet
- Embedded Systems Lab ManualDocument60 pagesEmbedded Systems Lab Manualtmuthu123100% (1)
- FPGA Design Flow & Experiment 1Document5 pagesFPGA Design Flow & Experiment 1Faid MuzahidNo ratings yet
- VerilogDocument6 pagesVerilogShaik IliyasNo ratings yet
- Max6675 Pic16f877aDocument3 pagesMax6675 Pic16f877aVICTOR HUGO HERNANDEZ CISNEROSNo ratings yet
- Lamp Iran2Document53 pagesLamp Iran2fachri cahyo prasetyoNo ratings yet
- Embedded Systems Lab Manual MODDocument20 pagesEmbedded Systems Lab Manual MODHari0% (1)
- Tutorial 1Document9 pagesTutorial 1bellashaneNo ratings yet
- 微處理機實習期末Document3 pages微處理機實習期末KK WNo ratings yet
- Lab 05-Interfacing LCD and Pic C and Its ApplicationDocument4 pagesLab 05-Interfacing LCD and Pic C and Its ApplicationNida AliNo ratings yet
- roject mẫu AVR2Document58 pagesroject mẫu AVR2luuvuduc81No ratings yet
- EncoderDocument2 pagesEncoderMishell DomingoNo ratings yet
- STM32 RC Car (Android Control Via Bluetooth)Document9 pagesSTM32 RC Car (Android Control Via Bluetooth)winNo ratings yet
- VerilogDocument22 pagesVerilogSyurga FathonahNo ratings yet
- "Global.h" "Avr/io.h"Document6 pages"Global.h" "Avr/io.h"Gabriela ValentinaNo ratings yet
- 15CS302J OS LabManualDocument74 pages15CS302J OS LabManualManu RajNo ratings yet
- Project1 1Document18 pagesProject1 1Bharath KumarNo ratings yet
- Esd AssignmentDocument11 pagesEsd AssignmentSNOWFLAKE STUDIONo ratings yet
- DocxDocument9 pagesDocxCường TrầnNo ratings yet
- Verilog Modules For Common Digital FunctionsDocument30 pagesVerilog Modules For Common Digital Functionssudarshan poojaryNo ratings yet
- ATMega16 LCD Digital ClockDocument5 pagesATMega16 LCD Digital Clockjamban48100% (1)
- Digital Clock Using Verilog Programming NEXYS-4Document6 pagesDigital Clock Using Verilog Programming NEXYS-4Nishant MishraNo ratings yet
- Lab2 GraficaDocument10 pagesLab2 GraficaMihaiNo ratings yet
- CodenghiencuuDocument7 pagesCodenghiencuuNhat NguyenNo ratings yet
- Os PGMDocument14 pagesOs PGMmuzzammil4422No ratings yet
- FPGA Summer ReportDocument18 pagesFPGA Summer ReportAbhishek RajNo ratings yet
- Computer Architecture Course: IT089IU International University - VNU HCM Date: March 2021 Dr. Le Hai Duong & Dr. Ly Tu Nga Time: 6 hours Trần Minh Duy ITITIU18230Document9 pagesComputer Architecture Course: IT089IU International University - VNU HCM Date: March 2021 Dr. Le Hai Duong & Dr. Ly Tu Nga Time: 6 hours Trần Minh Duy ITITIU18230Duy Tran MinhNo ratings yet
- PIC18F4550 Watchdog Timer - PIC ControllersDocument5 pagesPIC18F4550 Watchdog Timer - PIC ControllersKrishanu Modak100% (2)
- "msp430x20x2.h": // TXD On P1.1 // RXD On P1.2Document6 pages"msp430x20x2.h": // TXD On P1.1 // RXD On P1.2oravetznNo ratings yet
- ATMega16 Microcontroller Digital LM35 LCD ThermometerDocument4 pagesATMega16 Microcontroller Digital LM35 LCD ThermometerAdrianMartinezMendez100% (3)
- Hanson InfographicDocument1 pageHanson Infographicapi-317118620No ratings yet
- Jon Memo FinalDocument3 pagesJon Memo Finalapi-317118620No ratings yet
- Jon Ece351 Project 1Document18 pagesJon Ece351 Project 1api-317118620No ratings yet
- Jon Ece360 Project 3Document11 pagesJon Ece360 Project 3api-317118620No ratings yet
- Job Log After Code ChangeDocument7 pagesJob Log After Code ChangetalupurumNo ratings yet
- UGF2824 - Elsins-OOW15 - Maris Elsins - Mining AWRDocument101 pagesUGF2824 - Elsins-OOW15 - Maris Elsins - Mining AWRgirglNo ratings yet
- Systems Programming With Standard CDocument10 pagesSystems Programming With Standard CNam Le100% (1)
- STR2601 Major Test 1 2023Document6 pagesSTR2601 Major Test 1 2023Masithembe Tera DumezweniNo ratings yet
- User Manual For PileAXL 2014 - A Program For Single Piles Under Axial LoadingDocument107 pagesUser Manual For PileAXL 2014 - A Program For Single Piles Under Axial Loadingmyplaxis100% (2)
- NodeB Technical DescriptionDocument5 pagesNodeB Technical DescriptioncosconorNo ratings yet
- Recruiter Cheat SheetDocument16 pagesRecruiter Cheat Sheetadhi_naren50% (2)
- DHCP All Internet Provider LP-8186, LP-8186c, LP-8616, LP-8686, LP-8696 and LP-9386Document6 pagesDHCP All Internet Provider LP-8186, LP-8186c, LP-8616, LP-8686, LP-8696 and LP-9386Eugene Ramos PortugueseNo ratings yet
- Android Controlled Arduino Robot CarDocument9 pagesAndroid Controlled Arduino Robot CarSutrianyNo ratings yet
- Rakesh Ranjan ResumeDocument6 pagesRakesh Ranjan Resumesee2rakesh100% (1)
- Dragonpay APIDocument31 pagesDragonpay APIhaizea obreinNo ratings yet
- Answer To The Question Number 1 A) Derive The Formula S Ge-2G For The Throughput of Pure ALOHA ProtocolDocument4 pagesAnswer To The Question Number 1 A) Derive The Formula S Ge-2G For The Throughput of Pure ALOHA ProtocolS M AkashNo ratings yet
- Android SDK Tools Only: Adb ShellDocument2 pagesAndroid SDK Tools Only: Adb ShellNuhuMabiriiziNo ratings yet
- Canadian Senior Mathematics Contest: The Centre For Education in Mathematics and Computing Cemc - Uwaterloo.caDocument4 pagesCanadian Senior Mathematics Contest: The Centre For Education in Mathematics and Computing Cemc - Uwaterloo.caHimanshu MittalNo ratings yet
- Quiz1 w15Document4 pagesQuiz1 w15Mohamed KhedrNo ratings yet
- CSS NC II CORE 1: Install & Configure Computer SystemsDocument54 pagesCSS NC II CORE 1: Install & Configure Computer SystemsEric Manrique Talamisan87% (38)
- Horizontal Prototype Vertical Prototype Analysis Prototype Domain PrototypeDocument1 pageHorizontal Prototype Vertical Prototype Analysis Prototype Domain PrototypeGangaa ShelviNo ratings yet
- Transportation Problems1Document122 pagesTransportation Problems1Japhet Repolledo100% (1)
- Ericsson Bts CommandsDocument4 pagesEricsson Bts CommandsRakesh OinamNo ratings yet
- Lab ManualDocument57 pagesLab ManualRahul SinghNo ratings yet
- CSC-103L Object Oriented Programming Section CDocument3 pagesCSC-103L Object Oriented Programming Section Cabdullahnasarullah10937No ratings yet
- Programming Instruction For Hach DR 2800Document7 pagesProgramming Instruction For Hach DR 2800saras unggulNo ratings yet
- Review of Related Studies and LiteratureDocument6 pagesReview of Related Studies and LiteratureKaycee Bulante67% (3)
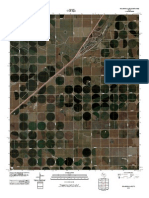
- Topographic Map of Oklahoma LaneDocument1 pageTopographic Map of Oklahoma LaneHistoricalMapsNo ratings yet
- Respondent Additional Submission (UDRP DEACOM - COM)Document9 pagesRespondent Additional Submission (UDRP DEACOM - COM)udrpfailNo ratings yet
- Salesforce Sample Resume 3Document9 pagesSalesforce Sample Resume 3abcdNo ratings yet
- EhcacheUserGuide-1 4 0Document151 pagesEhcacheUserGuide-1 4 0Khanh NguyenNo ratings yet
- R NoteDocument56 pagesR NoteSuchismita SahuNo ratings yet
- Memory Mapped IO & Dedicated IODocument4 pagesMemory Mapped IO & Dedicated IOLiza SaimanNo ratings yet
- Edyoda CourseDocument15 pagesEdyoda CourseSun StarNo ratings yet