You might also like
- Brunei Driving LicenceDocument18 pagesBrunei Driving Licenceapi-3051162582% (11)
- NZTA Licence Theory Test - AnswersDocument7 pagesNZTA Licence Theory Test - AnswersHowell Tungol100% (1)
- CNC 6040 User ManualDocument23 pagesCNC 6040 User ManualSeyton123100% (1)
- 194986-Millennium Wiring Manual July 2006Document20 pages194986-Millennium Wiring Manual July 2006ramjoceNo ratings yet
- Industrial Training ReportDocument10 pagesIndustrial Training ReportAndrew Graham LeeNo ratings yet
- 9358 PDFDocument14 pages9358 PDFgems2011No ratings yet
- Government of Maharashtra Admissions ToDocument154 pagesGovernment of Maharashtra Admissions ToKaran UdawantNo ratings yet
- SelectionList R3 AyushDocument608 pagesSelectionList R3 Ayushkalpanawaghmare969No ratings yet
- Accuset 1000 Spin Motor InstallationDocument4 pagesAccuset 1000 Spin Motor InstallationAnderson R. RojasNo ratings yet
- Ralco: Operating InstructionsDocument2 pagesRalco: Operating InstructionsRafael TejedaNo ratings yet
- Accident Statistics Buzzer During Any AccidentDocument1 pageAccident Statistics Buzzer During Any Accidentsheema mogilisettyNo ratings yet
- Autnomous Robotics - Techsoc 2016Document8 pagesAutnomous Robotics - Techsoc 2016Sachin TendulkarNo ratings yet
- (ESP) Hanger Hook Forming Machine ManualDocument11 pages(ESP) Hanger Hook Forming Machine ManualAndres F. CabreraNo ratings yet
- DPJ02Document13 pagesDPJ02PeiDiNo ratings yet
- CNC ManualDocument23 pagesCNC ManualJessica WilliamsNo ratings yet
- SelectionList - AYUSH R2-WebDocument689 pagesSelectionList - AYUSH R2-WebasbtheluckyguyNo ratings yet
- 1631696259AR Online Assignment 03Document11 pages1631696259AR Online Assignment 03sabir aliNo ratings yet
- Garla Mandal: SCALE 1: 50000Document1 pageGarla Mandal: SCALE 1: 50000Anonymous ghNUgC1No ratings yet
- Autobots: A Battle For SurvivalDocument6 pagesAutobots: A Battle For Survivalbon2lead208No ratings yet
- 4c 2013Document33 pages4c 2013Uthaya Chandrika RamiahNo ratings yet
- PanchayatDocument21 pagesPanchayatrkpragadeeshNo ratings yet
- Check MethodDocument3 pagesCheck MethodehuamaniNo ratings yet
- WESTGODAVARIDocument38 pagesWESTGODAVARIMadhu Kannaiah100% (1)
- NEET (UG) - 2017-Fifth Selection List For Health Science of The Directorate of Medical Education AnDocument219 pagesNEET (UG) - 2017-Fifth Selection List For Health Science of The Directorate of Medical Education AnKaran Udawant0% (1)
- SelectionList R1-Web AHU ExDocument754 pagesSelectionList R1-Web AHU Exasifsheril143No ratings yet
- How To Make 6 Digit LED Large Screen TwoDocument11 pagesHow To Make 6 Digit LED Large Screen TwoLuisEnriqueIshikawaTakeuchiNo ratings yet
- Line FollowerDocument13 pagesLine FollowerFarah AzamNo ratings yet
- Final Khammam Dist. Profile - Dt. 29.11.12Document53 pagesFinal Khammam Dist. Profile - Dt. 29.11.12sbikmmNo ratings yet
- Joint Hearing, 110TH Congress - Member Briefing On Voting in The House of RepresentativesDocument22 pagesJoint Hearing, 110TH Congress - Member Briefing On Voting in The House of RepresentativesScribd Government DocsNo ratings yet
- Dr.R.M.L.S.College, Deewan Road, Muzaffarpur List of Students Mukhyamantri Kanya Uthan Intermediate (Arts, Science, Commerce) Protsahan Yojna 2018Document4 pagesDr.R.M.L.S.College, Deewan Road, Muzaffarpur List of Students Mukhyamantri Kanya Uthan Intermediate (Arts, Science, Commerce) Protsahan Yojna 2018abhaybittuNo ratings yet
- Tips For The Driving TestDocument2 pagesTips For The Driving TestKaran BangiaNo ratings yet
- APCBTMP - Abstract - Stage of Works - Assembly Contituency Wise District:: Ranga Reddy Date: 16-2-13Document5 pagesAPCBTMP - Abstract - Stage of Works - Assembly Contituency Wise District:: Ranga Reddy Date: 16-2-13Sagar Paul'gNo ratings yet
- Dr.R.M.L.S.College, Deewan Road, MuzaffarpurDocument7 pagesDr.R.M.L.S.College, Deewan Road, MuzaffarpurabhaybittuNo ratings yet
- Engg PDFDocument2,369 pagesEngg PDFshobhitgupta61440% (1)
- Line Follower: The Robot Follows Black Line On The Track As Fast As PossibleDocument1 pageLine Follower: The Robot Follows Black Line On The Track As Fast As PossibleHananNo ratings yet
- Mailadumparai - Brrp-Final-1Document37 pagesMailadumparai - Brrp-Final-1rkpragadeeshNo ratings yet
- All Star DrivingDocument12 pagesAll Star DrivingDominic EbonaNo ratings yet
- Mechatronix: Automatic Ground Vehicle (Agv)Document7 pagesMechatronix: Automatic Ground Vehicle (Agv)Akash MehrotraNo ratings yet
- Navigation of PIC Based Robot Using Shortest Path Planning AlgorithmDocument43 pagesNavigation of PIC Based Robot Using Shortest Path Planning Algorithmkarishma10No ratings yet
- Important Direction Sense QuestionsDocument18 pagesImportant Direction Sense QuestionssumitNo ratings yet
- Dr.R.M.L.S.College, Deewan Road, MuzaffarpurDocument5 pagesDr.R.M.L.S.College, Deewan Road, MuzaffarpurabhaybittuNo ratings yet
- Robotron Final PDFDocument4 pagesRobotron Final PDFHancy ChaudharyNo ratings yet
- Bao Cao HTDDocument27 pagesBao Cao HTDĐông Võ ThanhNo ratings yet
- How To Build A Simple Line Tracer RobotDocument6 pagesHow To Build A Simple Line Tracer RobotaashlinnNo ratings yet
- Line Follower DocumentationDocument4 pagesLine Follower Documentationang luNo ratings yet
- Line Follower RobotDocument10 pagesLine Follower Robotvishal groverNo ratings yet
- Rasco: Manual Pneumatics and Cylinder Fiber OpticsDocument1 pageRasco: Manual Pneumatics and Cylinder Fiber OpticsLau Weng LoonNo ratings yet
- Line FollowerDocument15 pagesLine FollowerShivam VaishnavNo ratings yet
- Star Trek, The Next Generation, A Final Unity #1Document5 pagesStar Trek, The Next Generation, A Final Unity #1adikressNo ratings yet
- Authorised KMPs To Determine Materiality of Events/information (Company Update)Document1 pageAuthorised KMPs To Determine Materiality of Events/information (Company Update)Shyam SunderNo ratings yet
- April 2022Document12 pagesApril 2022Pavithra VNo ratings yet
- Field Robot Event 2023 - TASKSDocument7 pagesField Robot Event 2023 - TASKSnpustamtcNo ratings yet
- IipDocument7 pagesIipAnjali ThackerNo ratings yet
- Topographic Map of BlancoDocument1 pageTopographic Map of BlancoHistoricalMapsNo ratings yet
- hp-10 91 Xx-ErrorDocument9 pageshp-10 91 Xx-ErrorVinh NguyenNo ratings yet
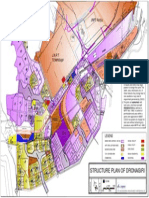
- Drona GiriDocument1 pageDrona Girinaziashaikh_1290No ratings yet
- Aybey Ax ManualDocument14 pagesAybey Ax ManualSuleman Amjad75% (4)
- Quest For The Rest: RulesDocument4 pagesQuest For The Rest: RulesPblock SaherNo ratings yet