You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5819)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (845)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
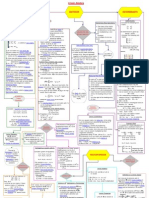
- Linear Algebra Flow Diagram 1Document1 pageLinear Algebra Flow Diagram 1stansmith1100% (1)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Productivity Measurement by ObjectivesDocument8 pagesProductivity Measurement by Objectivesvia_haditomoNo ratings yet
- Hill CipherDocument6 pagesHill CipherParichay GuptoNo ratings yet
- Sigra SIEMENS ManualDocument124 pagesSigra SIEMENS ManualoliverristeskiNo ratings yet
- Print Version - Ansi (Ieee) Protective Device NumberingDocument5 pagesPrint Version - Ansi (Ieee) Protective Device NumberingParichay GuptoNo ratings yet
- Conn, Lta, Mtoa, StoaDocument91 pagesConn, Lta, Mtoa, StoaParichay GuptoNo ratings yet
- Distance Protection SchemesDocument11 pagesDistance Protection SchemesParichay GuptoNo ratings yet
- ReadmeDocument31 pagesReadmeParichay GuptoNo ratings yet
- Public Service Commission, West Bengal W.B.C.S. (Executive) Etc. Examination, 2013Document5 pagesPublic Service Commission, West Bengal W.B.C.S. (Executive) Etc. Examination, 2013Parichay GuptoNo ratings yet
- Sharing of TR Losses in ISTS SystemDocument28 pagesSharing of TR Losses in ISTS SystemParichay GuptoNo ratings yet
- Very Large Power System Operators in The WorldDocument79 pagesVery Large Power System Operators in The WorldParichay GuptoNo ratings yet
- DB2 Udb Total CommandsDocument809 pagesDB2 Udb Total Commands3dramkyNo ratings yet
- Transmission Lines: - Bhanu BhushanDocument6 pagesTransmission Lines: - Bhanu BhushanParichay GuptoNo ratings yet
- Smart Grid NPTIDocument22 pagesSmart Grid NPTIParichay GuptoNo ratings yet
- Numerical Solution of Nonlinear Schrödinger Equation by Using Time-Space Pseudo-Spectral MethodDocument14 pagesNumerical Solution of Nonlinear Schrödinger Equation by Using Time-Space Pseudo-Spectral Methodsixtinah deswilanNo ratings yet
- Shiva Dhaba - 107Document31 pagesShiva Dhaba - 107Muhammad NaveedNo ratings yet
- Antoine Constants of WaterDocument16 pagesAntoine Constants of WaterJames Rommel SilaoNo ratings yet
- An1621 Digital Image ProcessingDocument18 pagesAn1621 Digital Image ProcessingSekhar ChallaNo ratings yet
- Quantitative Relationships Between Key Performance Indicators For SupportingDocument10 pagesQuantitative Relationships Between Key Performance Indicators For Supportingjihanebk0% (1)
- TeachingSampling PackagerDocument101 pagesTeachingSampling PackagerANGÉLICA GUARÍNNo ratings yet
- 2023 9 2 1 ColonescuDocument14 pages2023 9 2 1 ColonescuSome445GuyNo ratings yet
- Altair Feko and WinProp 2019.2 Release Notes PDFDocument189 pagesAltair Feko and WinProp 2019.2 Release Notes PDFFreesomNo ratings yet
- A Comprehensive Overview of The ELECTRE Method in Multi - Criteria Decision-MakingDocument12 pagesA Comprehensive Overview of The ELECTRE Method in Multi - Criteria Decision-MakingHamed TaherdoostNo ratings yet
- Trefftz FInite Element Method and Its ApplicationsDocument22 pagesTrefftz FInite Element Method and Its Applicationsa2172265No ratings yet
- Hec - 4 Manual Original CompletoDocument95 pagesHec - 4 Manual Original CompletoMiguel Angel Ramirez Zarate cel 944083578No ratings yet
- State Observer: Escuela de Ingeniería MecánicaDocument14 pagesState Observer: Escuela de Ingeniería MecánicaJean Carlo GfNo ratings yet
- Introduction To MATLAB: Ashraf Al-Rimawi Matlab 12-12-2008Document32 pagesIntroduction To MATLAB: Ashraf Al-Rimawi Matlab 12-12-2008Sura DaraghmehNo ratings yet
- MANE 4240 & CIVL 4240 Introduction To Finite Elements: Prof. Suvranu deDocument82 pagesMANE 4240 & CIVL 4240 Introduction To Finite Elements: Prof. Suvranu desat0112No ratings yet
- Engineering Mathematics Practice Questions & Solutions PDFDocument117 pagesEngineering Mathematics Practice Questions & Solutions PDFsagar kolheNo ratings yet
- Chapter 5 The Matrix Method in Paraxial Optics: Optical SystemsDocument22 pagesChapter 5 The Matrix Method in Paraxial Optics: Optical SystemsElizabeth zachariasNo ratings yet
- Brief Outline of All Courses of The IT ProgrammeDocument31 pagesBrief Outline of All Courses of The IT ProgrammeHiền ThảoNo ratings yet
- The ODE Suite MAtlabDocument35 pagesThe ODE Suite MAtlabMisael RamírezNo ratings yet
- MTH 105Document70 pagesMTH 105AhmodNo ratings yet
- Graph Part3Document3 pagesGraph Part3mlheeseNo ratings yet
- Comparison of Projection of Distance Techniques For Genetic DiversityDocument12 pagesComparison of Projection of Distance Techniques For Genetic Diversitybirhanu mechaNo ratings yet
- F.Y.B.Com SyllabusDocument50 pagesF.Y.B.Com Syllabusrakesh_crcNo ratings yet
- University of Engineering & Technology PeshawarDocument2 pagesUniversity of Engineering & Technology PeshawarSamina Begum100% (1)
- EM-Based Design of Large-Scale Dielectric-Resonator Filters and Multiplexers by Space MappingDocument7 pagesEM-Based Design of Large-Scale Dielectric-Resonator Filters and Multiplexers by Space MappingvilhuenNo ratings yet
- CS612 - Algorithms in Bioinformatics: Spring 2014 - Class 17Document33 pagesCS612 - Algorithms in Bioinformatics: Spring 2014 - Class 17Charles RoyNo ratings yet
- Unit Iv DabsDocument4 pagesUnit Iv Dabssanthini.tNo ratings yet
- Abstract AlgebraDocument102 pagesAbstract AlgebraAshokKumarNo ratings yet