You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Lessons in Electronic Circuits VIDocument374 pagesLessons in Electronic Circuits VITugas100% (11)
- AlternatorsDocument26 pagesAlternatorsInsane Clown Prince100% (3)
- PBV20N2 Service ManualDocument244 pagesPBV20N2 Service ManualJack Norhy100% (1)
- Massey Ferguson Mf2400 2006 Operation and Maintenance ManualDocument10 pagesMassey Ferguson Mf2400 2006 Operation and Maintenance Manualmarcia100% (43)
- Data Structures Using C++Document167 pagesData Structures Using C++Insane Clown Prince92% (12)
- Fundamental Numerical Methods and Data Analysis - CollinsDocument284 pagesFundamental Numerical Methods and Data Analysis - Collinssebarm86100% (1)
- AISC Seismic Design-Module2-Moment Resisting Frames Vol 1Document13 pagesAISC Seismic Design-Module2-Moment Resisting Frames Vol 1Luís Macedo100% (2)
- TU5J4 (NFU) 1.6 16V Petrol Engine Wiring TU5J4 (NFU) 1.6 16V Petrol Engine Wiring Diagram DiagramDocument6 pagesTU5J4 (NFU) 1.6 16V Petrol Engine Wiring TU5J4 (NFU) 1.6 16V Petrol Engine Wiring Diagram DiagramRuiNo ratings yet
- PDF Modul 9 Bahan Belajar Sekolah Dasar Mata Kuliah Perspektif Pendidikan SD Pdgk4104Document93 pagesPDF Modul 9 Bahan Belajar Sekolah Dasar Mata Kuliah Perspektif Pendidikan SD Pdgk4104Miftakhul NikmahNo ratings yet
- Competency Based Learning Material: Technical Education and Skills Development AuthorityDocument33 pagesCompetency Based Learning Material: Technical Education and Skills Development AuthorityCharis Abad0% (2)
- Lecture Notes in Discrete MathematicsDocument220 pagesLecture Notes in Discrete Mathematicsjpaulino100% (4)
- Rexroth: Spare Parts ListDocument26 pagesRexroth: Spare Parts ListRafael RodriguezNo ratings yet
- Microprocessor Vs MicrocontrollerDocument1 pageMicroprocessor Vs MicrocontrollerInsane Clown PrinceNo ratings yet
- Lessons in Electronic Circuits V - RefeDocument157 pagesLessons in Electronic Circuits V - RefeafmalallafNo ratings yet
- Digital ElectronicsDocument232 pagesDigital Electronicsmelankolik23100% (7)
- 12053.lessons in Electric Circuits 3 - SemiconductorsDocument365 pages12053.lessons in Electric Circuits 3 - SemiconductorsfmambelNo ratings yet
- Polyphase Induction MotorDocument38 pagesPolyphase Induction MotorSaad KhaliqNo ratings yet
- Digital Logic and DesignDocument1 pageDigital Logic and DesignInsane Clown PrinceNo ratings yet
- Chapter 01-Control Systems Engineering-Norman S Nise 4th Edition-Solution Manual PDFDocument11 pagesChapter 01-Control Systems Engineering-Norman S Nise 4th Edition-Solution Manual PDFRaufzha AnandaNo ratings yet
- Digital Logic and Design (BOOLEAN ALGEBRA)Document4 pagesDigital Logic and Design (BOOLEAN ALGEBRA)Insane Clown PrinceNo ratings yet
- Digital Logic and Design (BOOLEAN ALGEBRA)Document4 pagesDigital Logic and Design (BOOLEAN ALGEBRA)Insane Clown PrinceNo ratings yet
- Synchronous MachinesDocument14 pagesSynchronous MachinesInsane Clown PrinceNo ratings yet
- Difference Between Synchronous & Induction MotorsDocument3 pagesDifference Between Synchronous & Induction MotorsInsane Clown PrinceNo ratings yet
- Digital Logic and Design (BASIC GATES)Document5 pagesDigital Logic and Design (BASIC GATES)Aseel Al-JebouryNo ratings yet
- Principles of Communication Systems by Taub & SchillingDocument119 pagesPrinciples of Communication Systems by Taub & SchillingInsane Clown Prince40% (5)
- Intro To Object Oriented Pro Using C++ by Peter MüllerDocument99 pagesIntro To Object Oriented Pro Using C++ by Peter Müllertuntuni77No ratings yet
- Electrical Measuring & Test InstrumentsDocument42 pagesElectrical Measuring & Test InstrumentsMichael Parohinog GregasNo ratings yet
- 008 - Electrical Machines II PDFDocument133 pages008 - Electrical Machines II PDFaathavan1991No ratings yet
- Lecture Notes On Numerical AnalysisDocument125 pagesLecture Notes On Numerical AnalysismelissayplNo ratings yet
- DC & AC Machines and Speed ControlDocument53 pagesDC & AC Machines and Speed ControlInsane Clown Prince60% (5)
- UVCE 2K6 EEE SyllabusDocument96 pagesUVCE 2K6 EEE SyllabusInsane Clown PrinceNo ratings yet
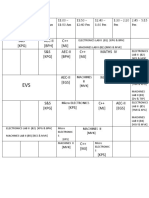
- UVCE EEE IV Semester Time-TableDocument1 pageUVCE EEE IV Semester Time-TableInsane Clown PrinceNo ratings yet
- TP6551 MobileOperationDocument48 pagesTP6551 MobileOperationAnonymous M0OEZEKoGiNo ratings yet
- Bucket ElevatorDocument18 pagesBucket Elevatorlhmamda ismailNo ratings yet
- Automotive Service Greases: Standard Classification and Specification ForDocument5 pagesAutomotive Service Greases: Standard Classification and Specification ForDavid CazorlaNo ratings yet
- Aer520 LabsDocument37 pagesAer520 LabsChristopher LauricoNo ratings yet
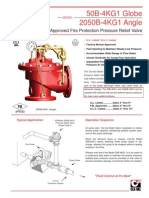
- Main Relief ValveDocument2 pagesMain Relief ValveJesseNo ratings yet
- Hubei Heqiang Machinery HQYZ-5Document2 pagesHubei Heqiang Machinery HQYZ-5brancilosNo ratings yet
- Abbattitore Di Temperatura Mod. BE-R101 - UKDocument3 pagesAbbattitore Di Temperatura Mod. BE-R101 - UKConrado TangariNo ratings yet
- Hull As A BeamDocument17 pagesHull As A BeamCemGülerNo ratings yet
- Neumax QT Series Quarter Turn Electric ActuatorDocument5 pagesNeumax QT Series Quarter Turn Electric Actuatornvhoang0185No ratings yet
- Tutorial7 7d KinematicsRigidBodyDocument12 pagesTutorial7 7d KinematicsRigidBodyJojnojie DannyzNo ratings yet
- Massabo-Richiami FratturaDocument53 pagesMassabo-Richiami FratturaTan ChingNo ratings yet
- Pantera1100 o 4Document3 pagesPantera1100 o 4Emad Abu SafeihNo ratings yet
- Course: Advanced Thermodynamics For Chemical and Process EngineeringDocument2 pagesCourse: Advanced Thermodynamics For Chemical and Process Engineeringnaytpuri montemayorNo ratings yet
- Single Compression Cable Glands - Comet PDFDocument2 pagesSingle Compression Cable Glands - Comet PDFdip461No ratings yet
- Ideal Gas LawDocument16 pagesIdeal Gas LawJomari ValenzuelaNo ratings yet
- Section 8 MastDocument5 pagesSection 8 MastAndré TarginoNo ratings yet
- Sealmaster MFC SeriesDocument1 pageSealmaster MFC SeriesCardoso MalacaoNo ratings yet
- Physics Spectrum December 2015 PDFDocument100 pagesPhysics Spectrum December 2015 PDFParvinder BhardwajNo ratings yet
- Bill of Materials - Sheet1Document1 pageBill of Materials - Sheet1api-598103816No ratings yet
- Shipyard Welding ProcessesDocument6 pagesShipyard Welding ProcessesPawan KumarNo ratings yet
- Wire Rope Hoist 2 TonDocument5 pagesWire Rope Hoist 2 Tonafrozashirahatti20No ratings yet
- Climaveneta CVM 20 ManualDocument20 pagesClimaveneta CVM 20 ManualisaNo ratings yet
- Manual de Manutenção-Ing2Document11 pagesManual de Manutenção-Ing2João GuardadoNo ratings yet