You might also like
- Evaluation of The Torque Measurement SystemDocument6 pagesEvaluation of The Torque Measurement System123andybNo ratings yet
- UENR88650001Document133 pagesUENR88650001sami akermi100% (1)
- Features General Description: DE-ACCM3D Buffered 3g Tri-Axis AccelerometerDocument5 pagesFeatures General Description: DE-ACCM3D Buffered 3g Tri-Axis Accelerometersamsonit1No ratings yet
- Measuring Tilt With Low-G Accelerometers: Application NoteDocument8 pagesMeasuring Tilt With Low-G Accelerometers: Application NoteAriel R. CéspedNo ratings yet
- Anjali Shah. Instrumentationlab Report1Document6 pagesAnjali Shah. Instrumentationlab Report1Anurag SahNo ratings yet
- Acelerometro ADXL103-ADXL203Document12 pagesAcelerometro ADXL103-ADXL203cukey13No ratings yet
- LVDT SensorsDocument6 pagesLVDT SensorsGx Makizky SagunNo ratings yet
- ADXL311 SensorDocument12 pagesADXL311 Sensorhacguest8485No ratings yet
- ADCMT TR8652 ElectrometerDocument4 pagesADCMT TR8652 Electrometerbudi0251No ratings yet
- Adxrs610 Yaw Rate GyroDocument12 pagesAdxrs610 Yaw Rate GyroTarek Car MillaNo ratings yet
- User 'S ManualDocument88 pagesUser 'S ManualEhitishamNo ratings yet
- AD22300, AD22301, AD22302: 3.3V Single and Dual Axis Automotive iMEMS AccelerometersDocument5 pagesAD22300, AD22301, AD22302: 3.3V Single and Dual Axis Automotive iMEMS AccelerometersHugo D. Alvarez100% (1)
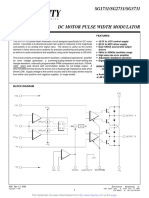
- SG1731/SG2731/SG3731: Features DescriptionDocument5 pagesSG1731/SG2731/SG3731: Features DescriptionRavindra MaraweeraNo ratings yet
- Manual Conversor WeidmullerDocument15 pagesManual Conversor WeidmullerAlmir PereiraNo ratings yet
- De Accm2g2Document4 pagesDe Accm2g2foxHellNo ratings yet
- Jelf243b 9126 1699633 PDFDocument10 pagesJelf243b 9126 1699633 PDFmauricio alfonsoNo ratings yet
- TMP 35 GDocument16 pagesTMP 35 GWeslley FariaNo ratings yet
- Korba TentativeDocument43 pagesKorba TentativeVenkatesh RaoNo ratings yet
- Integrated Circuit True RMS-to-DC Converter: C To +125 C Operation (AD536AS)Document8 pagesIntegrated Circuit True RMS-to-DC Converter: C To +125 C Operation (AD536AS)Decker JamesNo ratings yet
- ADXL202/ADXL210: Using The Analog Output Power Cycling When Using The Digital OutputDocument1 pageADXL202/ADXL210: Using The Analog Output Power Cycling When Using The Digital OutputmhasansharifiNo ratings yet
- Agilent Log Preamp CalibrationDocument2 pagesAgilent Log Preamp Calibrationskeja2411No ratings yet
- ADXL326 AcelerometroDocument16 pagesADXL326 AcelerometroGerman GodiNo ratings yet
- Ea440 T Manual enDocument4 pagesEa440 T Manual enArc HieNo ratings yet
- Seca 728 Service ManualDocument19 pagesSeca 728 Service Manualperla_canto_1100% (1)
- Digital Weighing TransmitterDocument60 pagesDigital Weighing TransmittergmweighingNo ratings yet
- 5855292-Avr Users Manual Ea63-5 CDocument8 pages5855292-Avr Users Manual Ea63-5 CAbhoe StankNo ratings yet
- MAG3 SMT Datasheet RevD1Document4 pagesMAG3 SMT Datasheet RevD1lgrome73No ratings yet
- Hah1dr 900 SDocument5 pagesHah1dr 900 SktwellNo ratings yet
- Complex Engineering Activity: Power Generation LABDocument15 pagesComplex Engineering Activity: Power Generation LABabis 11No ratings yet
- LM334Document26 pagesLM3342567daNo ratings yet
- ATT2100 & 2200 ManualDocument52 pagesATT2100 & 2200 ManualFranco SNo ratings yet
- SG1524Document9 pagesSG1524Med Habib AitNo ratings yet
- Baro Transmitter B-278-1T / - 2T: Instruction For UseDocument8 pagesBaro Transmitter B-278-1T / - 2T: Instruction For UseAhmad Hisyam ArifNo ratings yet
- Ad 536 ADocument8 pagesAd 536 AlamikkNo ratings yet
- A132XDocument10 pagesA132XAndres CamachoiNo ratings yet
- Calibration For HA43RJDocument16 pagesCalibration For HA43RJQussai BitarNo ratings yet
- Instrumentation AmplifierDocument3 pagesInstrumentation AmplifierFreddy LlusionNo ratings yet
- SG 1524 - 2524 - 3524 - (LinFinity) PDFDocument7 pagesSG 1524 - 2524 - 3524 - (LinFinity) PDFJosé AdelinoNo ratings yet
- Low Cost 1.2 G Dual Axis Accelerometer ADXL213: Features General DescriptionDocument13 pagesLow Cost 1.2 G Dual Axis Accelerometer ADXL213: Features General DescriptionJose Adolfo Monteverde SalazarNo ratings yet
- Thermocouple Amplifier - Dual Ga 112Document3 pagesThermocouple Amplifier - Dual Ga 112SUVENDU ADHIKARYNo ratings yet
- Installation ManualenDocument8 pagesInstallation Manualenthiago weniskleyNo ratings yet
- Lab Session No. 7: ObjectiveDocument4 pagesLab Session No. 7: ObjectiveNioNo ratings yet
- Ad 811Document16 pagesAd 811srboghe651665No ratings yet
- Conductivity Supervision DescriptionDocument3 pagesConductivity Supervision DescriptionMauricio Schmidt MunizNo ratings yet
- Nitronex An9Document9 pagesNitronex An9sanghomitraNo ratings yet
- GS2744BDocument10 pagesGS2744BToàn NgọcNo ratings yet
- Accelerometer:-: Musical InstrumentDocument14 pagesAccelerometer:-: Musical InstrumentJyotirekha PatiNo ratings yet
- Generator Automatic Voltage Regulator Operation ManualDocument9 pagesGenerator Automatic Voltage Regulator Operation Manualsabrahima100% (1)
- Vip 9615Document37 pagesVip 9615Phạm Văn HânNo ratings yet
- XK3101 (KM05) User ManualDocument17 pagesXK3101 (KM05) User ManualmanhNo ratings yet
- Protek 3033B User ID7248Document10 pagesProtek 3033B User ID7248Heiner Farid Castillo AvellaNo ratings yet
- User Manual: Hat530 Ats ControllerDocument26 pagesUser Manual: Hat530 Ats Controllerrjcp01No ratings yet
- 4-Channel/8-Channel Fault-Protected Analog Multiplexers ADG508F/ADG509F/ADG528FDocument20 pages4-Channel/8-Channel Fault-Protected Analog Multiplexers ADG508F/ADG509F/ADG528FSanket NaikNo ratings yet
- User'S Manual: Larsen & Toubro LimitedDocument8 pagesUser'S Manual: Larsen & Toubro LimitedRa HulNo ratings yet
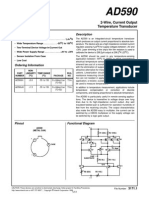
- AD590Document11 pagesAD590Timmy Neil SixxNo ratings yet
- ADXL210Document11 pagesADXL210JaehyupKimNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet