You might also like
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Subaru Ee20 Speed Control SystemsDocument9 pagesSubaru Ee20 Speed Control SystemsAlexandros Kontos100% (1)
- W450301C Greer Element Operation ManualDocument30 pagesW450301C Greer Element Operation ManualJuan Manuel Lira CruzNo ratings yet
- Fuel Rack Solenoid - TestDocument6 pagesFuel Rack Solenoid - TestAdolfo Dario SaavedraNo ratings yet
- Philips MicroDose-L30-full CalibrationDocument12 pagesPhilips MicroDose-L30-full CalibrationTony Kututo100% (1)
- PNEUMATICS AND AIR CIRCUITS UNDERSTANDING THE CASCADE VALVE AND PLC UNDERSTANDINGFrom EverandPNEUMATICS AND AIR CIRCUITS UNDERSTANDING THE CASCADE VALVE AND PLC UNDERSTANDINGNo ratings yet
- Boss GE-10 Service NotesDocument5 pagesBoss GE-10 Service NotesIncubusKissNo ratings yet
- DocumentationDocument39 pagesDocumentationOlegNo ratings yet
- Cat 14M Hamide - Sisweb - Sisweb - Techdoc - Techdoc - Print - Page - JSPDocument6 pagesCat 14M Hamide - Sisweb - Sisweb - Techdoc - Techdoc - Print - Page - JSPMehdi Chakroune100% (1)
- 1079 3Document5 pages1079 3Marco OlivettoNo ratings yet
- 143909AADocument116 pages143909AAQussai Bitar100% (1)
- Cec2 OperationDocument11 pagesCec2 OperationWilson Cendales100% (1)
- D6N XL Differential Steering, Electrohydraulic Implement Troubleshooting GuideDocument5 pagesD6N XL Differential Steering, Electrohydraulic Implement Troubleshooting GuideMarco OlivettoNo ratings yet
- Zapi Ac0 Manual 092004 enDocument75 pagesZapi Ac0 Manual 092004 enbanejustyNo ratings yet
- GAC Panel Functions and ConnectionsDocument899 pagesGAC Panel Functions and ConnectionschudyaceNo ratings yet
- Fuji GS645 Service ManualDocument94 pagesFuji GS645 Service ManualJuan Angel Gonzalez Campos100% (1)
- Current Electricity - (Worksheet)Document3 pagesCurrent Electricity - (Worksheet)s.hiruthivNo ratings yet
- Error Code Table: Iflex2 (C Structure)Document9 pagesError Code Table: Iflex2 (C Structure)Miguel HernandezNo ratings yet
- Ha16-Ha18px Training ManualDocument110 pagesHa16-Ha18px Training ManualjonyNo ratings yet
- EHC NewDocument46 pagesEHC NewSam100% (6)
- KWU Electro Hydraulic Governing Final1Document41 pagesKWU Electro Hydraulic Governing Final1Sam80% (5)
- Greer RCI510 Operators W450273ADocument33 pagesGreer RCI510 Operators W450273AAndres Florentin Pizarro LazarteNo ratings yet
- Checkweigher Installation and Operation GuideDocument29 pagesCheckweigher Installation and Operation GuideJorge Tovar Valencia100% (2)
- Zapi B1Document34 pagesZapi B1Corjuc Stefan100% (8)
- Sigma 3 Servo Motor Er20 50 Pre 2003Document51 pagesSigma 3 Servo Motor Er20 50 Pre 2003Nishanth KallingentavidaNo ratings yet
- MF HA12-15IP EN E09.12Document95 pagesMF HA12-15IP EN E09.12Qussai Bitar100% (1)
- Steering System and Main Propulsion ArrangementDocument26 pagesSteering System and Main Propulsion ArrangementveramondNo ratings yet
- User Manual: HGM6100K Series Genset ControllerDocument30 pagesUser Manual: HGM6100K Series Genset ControllerRODRIGO_RALONo ratings yet
- Section 4 - Installation and Calibration: MountingDocument4 pagesSection 4 - Installation and Calibration: MountinggovindarulNo ratings yet
- CAUTION: You Must Remove The Piccolo Tube and Put A Cap On The BarometricDocument10 pagesCAUTION: You Must Remove The Piccolo Tube and Put A Cap On The BarometricAntonio CorteNo ratings yet
- Angle-Of-Attack System - Adjustment-TestDocument9 pagesAngle-Of-Attack System - Adjustment-TestEleazarNo ratings yet
- 07 InvertedPendulumSystemDocument10 pages07 InvertedPendulumSystembgizachewNo ratings yet
- Solucionador de Problemas VibroDocument8 pagesSolucionador de Problemas Vibrojavier lopezNo ratings yet
- Control Moment Gyroscope: C A C g1 g2Document20 pagesControl Moment Gyroscope: C A C g1 g2Puti FikriNo ratings yet
- W450301D Element Terex Operators EnglishDocument30 pagesW450301D Element Terex Operators Englishjoaoaraujo1390No ratings yet
- Samsung - CK 5020 T S 15 A - SM PDFDocument26 pagesSamsung - CK 5020 T S 15 A - SM PDFRaul AlvaradoNo ratings yet
- Circuit Mate 9020 - 20 MHZ OscilloscopeDocument11 pagesCircuit Mate 9020 - 20 MHZ OscilloscopedecalusNo ratings yet
- Adjusting boom movements on TD 40150Document6 pagesAdjusting boom movements on TD 40150RodrigoNo ratings yet
- Calibration: Brake Control - Vehicle Stability Control SystemDocument4 pagesCalibration: Brake Control - Vehicle Stability Control SystemSanjaya Leelananda RajathewaNo ratings yet
- Calibracion de EmbragguesDocument8 pagesCalibracion de EmbragguesRomeo WilliamsNo ratings yet
- ABS AND BRAKE SYSTEM DIAGRAMDocument263 pagesABS AND BRAKE SYSTEM DIAGRAMSatish DevisettiNo ratings yet
- Thermo Ramsey EngDocument13 pagesThermo Ramsey EngSebastian NarvaezNo ratings yet
- Turbine Speed Sensor Removal (TB-50LS) : 1. Preliminary and Post Procedures 1. Preliminary ProceduresDocument17 pagesTurbine Speed Sensor Removal (TB-50LS) : 1. Preliminary and Post Procedures 1. Preliminary ProceduresPatricio ValenciaNo ratings yet
- DTC C1246/46 Master Cylinder Pressure Sensor Malfunction Master Cylinder Pressure Sensor Output Mal-Function (Test Mode DTC)Document2 pagesDTC C1246/46 Master Cylinder Pressure Sensor Malfunction Master Cylinder Pressure Sensor Output Mal-Function (Test Mode DTC)Zaw Zaw Min HtetNo ratings yet
- Unit OperationDocument8 pagesUnit Operationphilcomedical sistemsNo ratings yet
- Samsung Kct52A TV ChassisDocument78 pagesSamsung Kct52A TV ChassisWarren DunnNo ratings yet
- SIG Motorized ValveDocument6 pagesSIG Motorized ValveAlexandre FerreiraNo ratings yet
- J3 Meter Removal Installation and Troubleshooting GuideDocument32 pagesJ3 Meter Removal Installation and Troubleshooting GuideWaqar KhattakNo ratings yet
- 5460 Hitch CalibrationDocument4 pages5460 Hitch CalibrationRichNo ratings yet
- Lab 05 (Servo)Document4 pagesLab 05 (Servo)hitesh89No ratings yet
- Adittional Axis Robot MitsubishiDocument111 pagesAdittional Axis Robot MitsubishiParIs MoRanNo ratings yet
- User's Manual of Weighing ControllerDocument7 pagesUser's Manual of Weighing Controllersergio abel ramirez zapataNo ratings yet
- New 1Document12 pagesNew 1HshsjNo ratings yet
- Closed Loop Control System (CSL - 04) : Technical Manual FORDocument19 pagesClosed Loop Control System (CSL - 04) : Technical Manual FORAAYUSH KUMARNo ratings yet
- Alignment AdjustmentDocument16 pagesAlignment AdjustmentecurrasNo ratings yet
- Microelecttrica ScientifaDocument2 pagesMicroelecttrica Scientifajaved shaikh chaandNo ratings yet
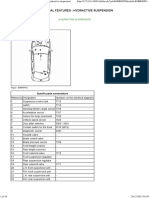
- Xantia II Hydractive Suspension GuideDocument16 pagesXantia II Hydractive Suspension Guidepudaruth_amitNo ratings yet
- Abs Highlander 3Document3 pagesAbs Highlander 3Cristian JaramilloNo ratings yet
- 38-17, Software Version 61 - 51Document5 pages38-17, Software Version 61 - 51nacho006No ratings yet
- 38-17, Software Version 61 - 51Document5 pages38-17, Software Version 61 - 51nacho006No ratings yet
- Air Conditioner Part Function and OK/NG JudgmentDocument4 pagesAir Conditioner Part Function and OK/NG JudgmentFandy MaulanNo ratings yet
- Board 55192 Replacement ProcedureDocument2 pagesBoard 55192 Replacement ProcedurekakarovsNo ratings yet
- D6R Track-Type Tractor 2YN00001-UP (MACHINE) POWننERED BY 3306 Engine (SEBP2615 - 58) - Document StructureDocument2 pagesD6R Track-Type Tractor 2YN00001-UP (MACHINE) POWننERED BY 3306 Engine (SEBP2615 - 58) - Document StructureBasem ElhosanyNo ratings yet
- Samsung 01Document16 pagesSamsung 01Adam KrobothNo ratings yet
- Bhel - Proportional Servo Based Ehc Control - Analysys and TroubleshootingDocument6 pagesBhel - Proportional Servo Based Ehc Control - Analysys and Troubleshootingckstarun22No ratings yet
- Control DynamicDocument10 pagesControl Dynamicكرار نعيم100% (1)
- AEROSPACE LAB EXPERIMENT ON SERVO CONTROLDocument24 pagesAEROSPACE LAB EXPERIMENT ON SERVO CONTROLhishamwahidinNo ratings yet
- Service Manual CentrifugeDocument42 pagesService Manual CentrifugemewkaharudinNo ratings yet
- Mitsubhishi Cop ProgrameDocument61 pagesMitsubhishi Cop ProgrameSunil KumarNo ratings yet
- Ajustes ElectricsDocument9 pagesAjustes Electricsluis tocoraNo ratings yet
- Compumotor Division Parker Hannifin CorporationDocument89 pagesCompumotor Division Parker Hannifin CorporationQussai BitarNo ratings yet
- (NK-1361) Haulotte Spare Parts (SBG-Haramain Div) - 1Document4 pages(NK-1361) Haulotte Spare Parts (SBG-Haramain Div) - 1Qussai BitarNo ratings yet
- Star 10 2022Document104 pagesStar 10 2022Qussai BitarNo ratings yet
- Compumotor Division Parker Hannifin CorporationDocument89 pagesCompumotor Division Parker Hannifin CorporationQussai BitarNo ratings yet
- Adobe Scan ٢٧ - ٠٤ - ٢٠٢١Document1 pageAdobe Scan ٢٧ - ٠٤ - ٢٠٢١Qussai BitarNo ratings yet
- GhiDocument1 pageGhiQussai BitarNo ratings yet
- Cut Off Times: Πjƒëàdg ÄébhcgDocument1 pageCut Off Times: Πjƒëàdg ÄébhcgQussai BitarNo ratings yet
- m092 H3y-Series Solid-State Timers Datasheet enDocument41 pagesm092 H3y-Series Solid-State Timers Datasheet enQussai BitarNo ratings yet
- Customer Pre Delivery Inspection: Obligator Control of New MachinesDocument2 pagesCustomer Pre Delivery Inspection: Obligator Control of New MachinesQussai BitarNo ratings yet
- CslinderDocument1 pageCslinderQussai BitarNo ratings yet
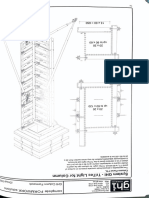
- ScafoldingDocument1 pageScafoldingQussai BitarNo ratings yet
- Cut Off Times: Πjƒëàdg ÄébhcgDocument1 pageCut Off Times: Πjƒëàdg ÄébhcgQussai BitarNo ratings yet
- Baity Fiber 100 Prepaid ArabicDocument1 pageBaity Fiber 100 Prepaid ArabicQussai BitarNo ratings yet
- Fluke 37x Calibation Manual PDFDocument24 pagesFluke 37x Calibation Manual PDFAllamNo ratings yet
- Customer Pre Delivery Inspection: Obligator Control of New MachinesDocument2 pagesCustomer Pre Delivery Inspection: Obligator Control of New MachinesQussai BitarNo ratings yet
- J305GAC Trojan Data SheetsDocument2 pagesJ305GAC Trojan Data SheetsQussai BitarNo ratings yet
- B0026 in Stock PDFDocument56 pagesB0026 in Stock PDFedgarklbNo ratings yet
- Apem Joysticks-series-MDocument5 pagesApem Joysticks-series-MALSAMAD V MNo ratings yet
- En HQ Mini Analog Pro LoresDocument16 pagesEn HQ Mini Analog Pro LoresBaldomero de Jesus CruzNo ratings yet
- Programmable TransmitterDocument2 pagesProgrammable TransmitterB28ogdyNo ratings yet
- Chapter 5&6Document72 pagesChapter 5&6Nuguse EdeoNo ratings yet
- Torqplus: Electric Valve Actuators and ControlsDocument33 pagesTorqplus: Electric Valve Actuators and Controlsoliper25No ratings yet
- Types of Resistance: Fixed ResistorsDocument4 pagesTypes of Resistance: Fixed ResistorsFatima SeharNo ratings yet
- Esm ManualDocument4 pagesEsm ManualAkhil BhadouriaNo ratings yet
- ServiceManual H15Document93 pagesServiceManual H15MohamedNo ratings yet
- Potenciômetro Burns 10K T15% L3% 1V Sem LimiteDocument4 pagesPotenciômetro Burns 10K T15% L3% 1V Sem Limiteitamar BarbosaNo ratings yet
- Guia de Seleccion e Info. Actuadores 2000 Honeywell PDFDocument16 pagesGuia de Seleccion e Info. Actuadores 2000 Honeywell PDFManuel GerardoNo ratings yet
- LMB (X) 24-SR (-T) : Proportional, Non-Spring Return, 24 V, For 2 To 10 VDC or 4 To 20 MaDocument2 pagesLMB (X) 24-SR (-T) : Proportional, Non-Spring Return, 24 V, For 2 To 10 VDC or 4 To 20 Majose javier bravo paezNo ratings yet
- Grundfos Tpe2!50!240 N A F A BqqeDocument10 pagesGrundfos Tpe2!50!240 N A F A BqqeLuca OvidiuNo ratings yet
- Tajuk 3 - Function of Hardware N Components (ARDUINO UNO BOARD)Document36 pagesTajuk 3 - Function of Hardware N Components (ARDUINO UNO BOARD)mikengei1No ratings yet
- Operating Instructions Transmitter For Angular Position Kinax 3W2Document2 pagesOperating Instructions Transmitter For Angular Position Kinax 3W2Margaret DaughertyNo ratings yet
- TLE7 CSS Mod4 Preparing and Interpreting Technical Drawing V3Document43 pagesTLE7 CSS Mod4 Preparing and Interpreting Technical Drawing V3EDU CHIONGNo ratings yet
- SM - 1850K Tier3 - EN - Error - CodesDocument1 pageSM - 1850K Tier3 - EN - Error - CodesBoris ZhilkinNo ratings yet
- Activity 3 Resistor Color CodesDocument5 pagesActivity 3 Resistor Color CodesJoel Kelly MabaoNo ratings yet
- Grade 9: Consumer Electronics-9Document29 pagesGrade 9: Consumer Electronics-9Jhonrey AyaoNo ratings yet
- VDO Diesel Tach GuageDocument2 pagesVDO Diesel Tach GuageicbidtNo ratings yet
- GEH220 2 WS5412 ChasisDocument471 pagesGEH220 2 WS5412 Chasishyman rodriguezNo ratings yet
- How to Build a Laser Harp Using LIDAR and Arduino - Project ReportDocument14 pagesHow to Build a Laser Harp Using LIDAR and Arduino - Project ReportDuniya ANo ratings yet